【C++】AVL树的插入操作实现以及验证是否正确(带平衡因子)
文章目录
- 前言
- 一、AVL树结点的定义
- 二、AVL树的插入(Insert)
- 插入完整代码:
- 1.左单旋(RotateL)
- 2.右单旋(RotateR)
- 3.先右单旋再左单旋(RotateRL)
- 1.保存的bf为0
- 2.保存的bf为1
- 3.保存的bf为-1
- 4.先左单旋再右单旋(RotateLR)
- 三、AVL树的验证
前言
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
1.它的左右子树都是AVL树
2.左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)
如果一棵二叉搜索树是高度平衡的,它就是AVL树。如果它有n个结点,其高度可保持在 O ( l o g 2 n ) O(log_2 n) O(log2n),搜索时间复杂度O( l o g 2 n log_2 n log2n)。
一、AVL树结点的定义
template<class K,class V>
//我们这里用键值的数据类型来举例
struct AVLTreeNode {pair<K, V> _kv;AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;//(父结点)int _bf;//(平衡因子大小)AVLTreeNode(const pair<K, V>& kv)//构造函数:_kv(kv),_left(nullptr),_right(nullptr),_parent(nullptr),_bf(0){}
};
二、AVL树的插入(Insert)
AVL树的插入过程可以分为两步:
- 按照二叉搜索树的方式插入新节点
- 调整节点的平衡因子

插入完整代码:
typedef AVLTreeNode<K, V> Node;
bool Insert(const pair<K, V>& kv) {if (_root == nullptr) {//若为空树就先建立结点_root = new Node(kv);return true;}Node* cur = _root;Node* parent = nullptr;while (cur) {//寻找要插入结点的父亲的位置if (cur->_kv.first < kv.first) {parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first) {parent = cur;cur = cur->_left;}else {return false;}}cur = new Node(kv);//找到要插入结点父亲后,寻找插入其左边还是右边if (parent->_kv.first < kv.first) {parent->_right = cur;}else {parent->_left = cur;}cur->_parent = parent;while (parent) {//更新平衡因子if (parent->_left == cur) {parent->_bf--;}else {parent->_bf ++ ;}// 更新后检测双亲的平衡因子if (parent->_bf == 0) {break;}else if (parent->_bf == 1 || parent->_bf == -1) {// 插入前双亲的平衡因子是0,插入后双亲的平衡因为为1 或者 -1 ,说明以双亲//为根的二叉树的高度增加了一层,因此需要继续向上调整cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2) {// 双亲的平衡因子为正负2,违反了AVL树的平衡性,需要对以parent// 为根的树进行旋转处理if (parent->_bf == 2 && cur->_bf == 1) {RotateL(parent);//左单旋}else if (parent->_bf == -2 && cur->_bf == -1) {RotateR(parent);//右单旋}else if (parent->_bf == 2 && cur->_bf == -1) {RotateRL(parent);//双旋}else if (parent->_bf == -2 && cur->_bf == 1) {RotateLR(parent);//双旋}break;}else {assert(false);}}return true;}
1.左单旋(RotateL)
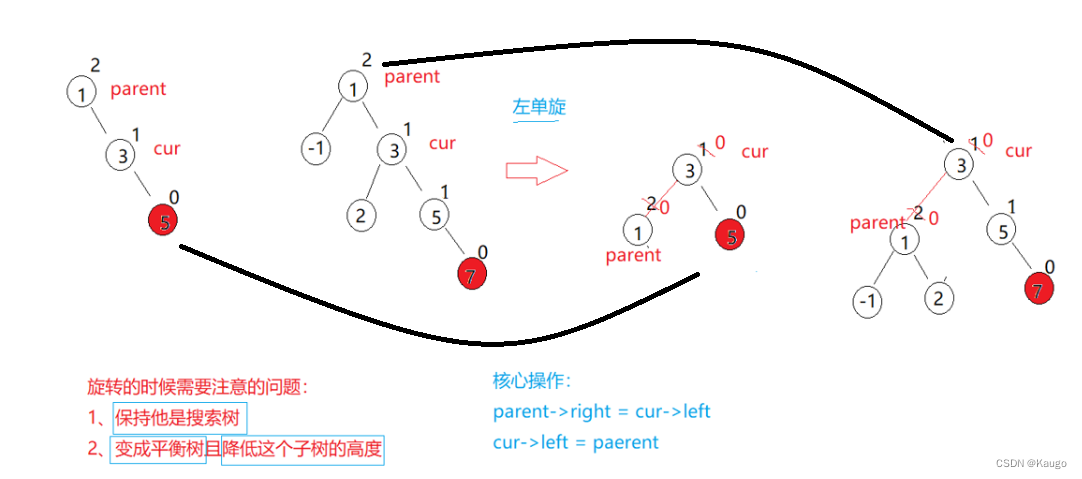
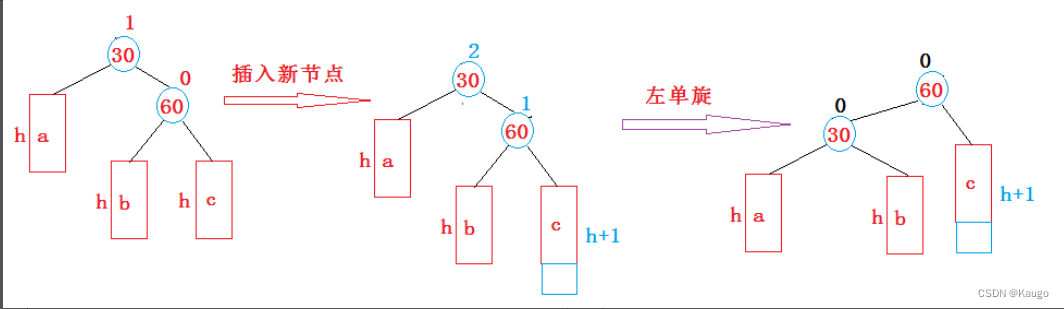
void RotateL(Node* parent) {Node* cur = parent->_right;Node* curleft = cur->_left;parent->_right = curleft;// 核心操作if (curleft) {//因为curleft可能为空curleft->_parent = parent;}Node* ppnode = parent->_parent;//提前记录下父结点的父亲cur->_left = parent;// 核心操作parent->_parent = cur;if (ppnode == nullptr) {//判断原先parent是否为根节点//因为根节点的父亲为空_root = cur;cur->_parent = nullptr;}else {//说明parent不为根节点//parent可能为ppnode的左或者右子树,改变ppnode的指向if (ppnode->_left == parent) {ppnode->_left = cur;}else {ppnode->_right = cur;}cur->_parent = ppnode;}parent->_bf = cur->_bf = 0;// 根据调整后的结构更新部分节点的平衡因子}
2.右单旋(RotateR)
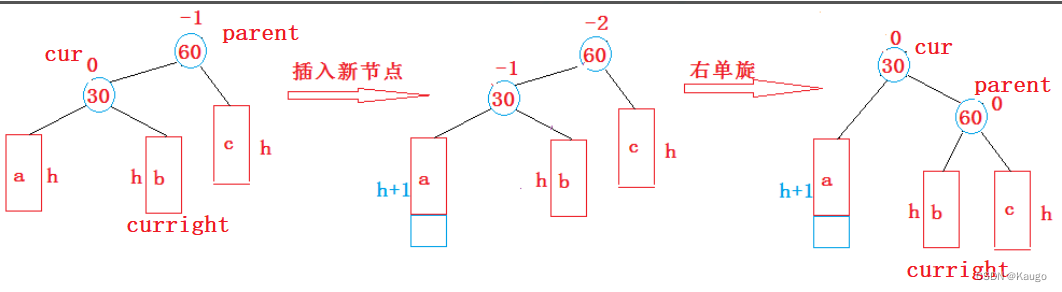
void RotateR(Node* parent) {Node* cur = parent->_left;Node* curright = cur->_right;parent->_left = curright;if (curright) {//因为curleft可能为空curright->_parent = parent;}cur->_right = parent;Node* ppnode = parent->_parent;parent->_parent = cur;if (ppnode == nullptr) {//判断原先parent是否为根节点//因为根节点的父亲为空_root = cur;cur->_parent = nullptr;}else {//说明parent不为根节点//parent可能为ppnode的左或者右子树,改变ppnode的指向if (ppnode->_left == parent) {ppnode->_left = cur;}else {ppnode->_right = cur;}cur->_parent = ppnode;}parent->_bf = cur->_bf = 0;// 根据调整后的结构更新部分节点的平衡因子}
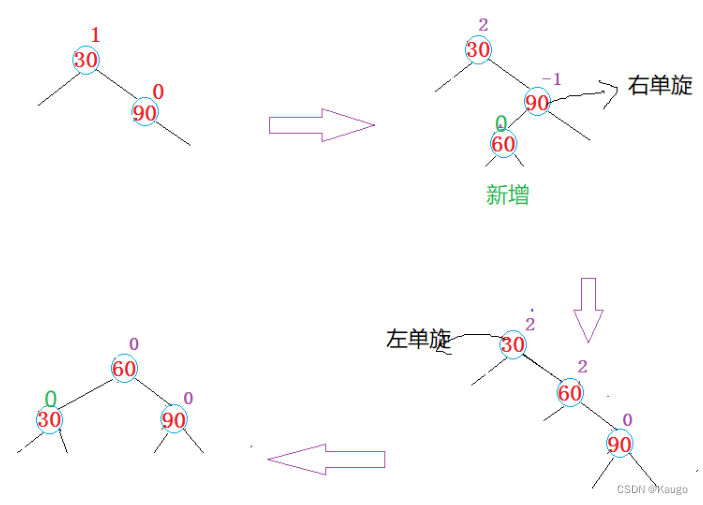
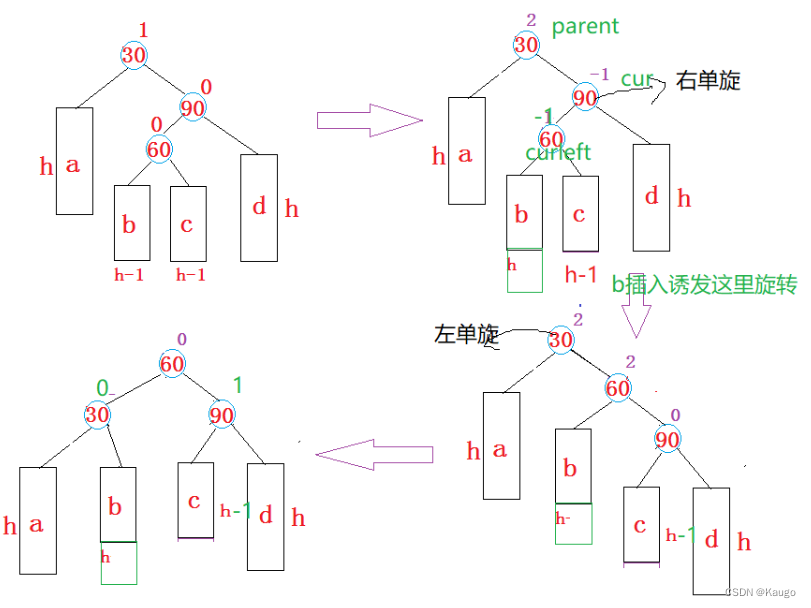
3.先右单旋再左单旋(RotateRL)
以cur为旋转点进行右旋,以parent为旋转点进行左旋,之后进行平衡因子的修改
void RotateRL(Node* parent) {Node* cur = parent->_right;Node* curleft = cur->_left;int bf = curleft->_bf;// 旋转之前,保存curleft的平衡因子,旋转完成之后,需要根据该平衡因子来调整其他节//点的平衡因子RotateR(cur);RotateL(parent);if (bf == 0) {cur->_bf = 0;curleft->_bf = 0;parent->_bf = 0;}else if (bf == 1) {cur->_bf = 0;curleft->_bf = 0;parent->_bf = -1;}else if (bf == -1){cur->_bf = 1;curleft->_bf = 0;parent->_bf = 0;}else{assert(false);}}
1.保存的bf为0
2.保存的bf为1
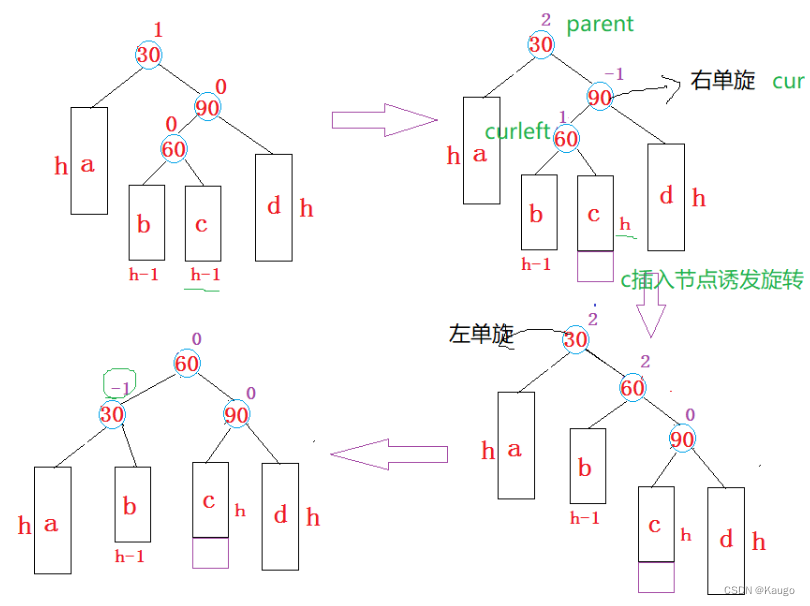
3.保存的bf为-1
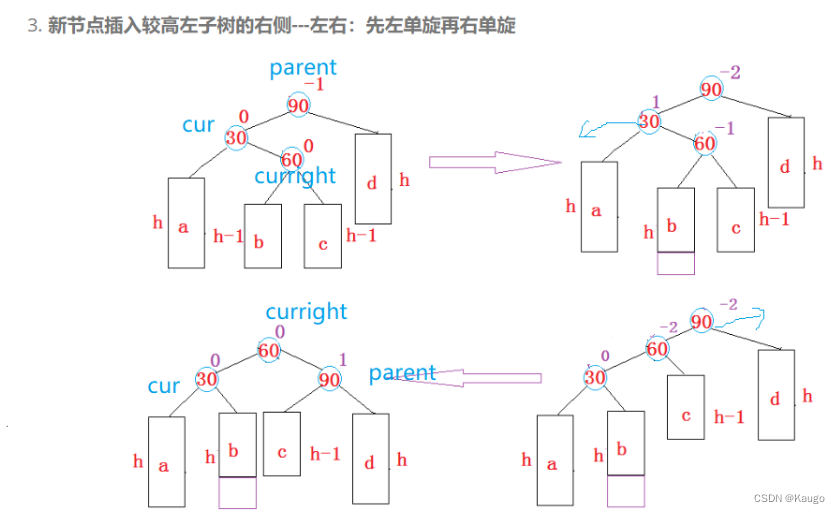
4.先左单旋再右单旋(RotateLR)
以cur为旋转点进行左旋,以parent为旋转点进行右旋,之后进行平衡因子的修改
void RotateLR(Node* parent) {Node* cur = parent->_left;Node* curright = cur->_right;int bf = curright->_bf;// 旋转之前,保存curright的平衡因子,旋转完成之后,需要根据该平衡因子来调整其他节//点的平衡因子RotateL(cur);RotateR(parent);if (bf == 0) {cur->_bf = 0;parent->_bf = 0;curright->_bf = 0;}else if (bf == -1){parent->_bf = 1;cur->_bf = 0;curright->_bf = 0;}else if (bf == 1){parent->_bf = 0;cur->_bf = -1;curright->_bf = 0;}else {assert(false);}}
三、AVL树的验证
验证其为平衡树关键点:
1.每个节点子树高度差的绝对值不超过1(注意节点中如果没有平衡因子)
2.节点的平衡因子是否计算正确
int Height(Node* root) {if (root == nullptr) {return 0;}int left = Height(root->_left);int right = Height(root->_right);return left > right ? left + 1 : right + 1;}bool IsBalance() {return IsBalance(_root);}bool IsBalance(Node* root) {if (root == nullptr) {return true;}int left = Height(root->_left);int right = Height(root->_right);if (right - left != root->_bf) {//节点的平衡因子是否计算正确cout << "平衡因子异常" << root->_kv.first << "=>" << root->_bf << endl;return false;}//每个节点子树高度差的绝对值不超过1//之后在验证左右子树return abs(right-left)<2&&IsBalance(root->_left) && IsBalance(root->_right);}
相关文章:
【C++】AVL树的插入操作实现以及验证是否正确(带平衡因子)
文章目录 前言一、AVL树结点的定义二、AVL树的插入(Insert)插入完整代码:1.左单旋(RotateL)2.右单旋(RotateR)3.先右单旋再左单旋(RotateRL)1.保存的bf为02.保存的bf为13…...
【Linux-Day10-信号量,共享内存,消息队列】
信号量 信号量描述 信号量是一个特殊的变量,一般取正数值。它的值代表允许访问的资源数目,获取资源 时,需要对信号量的值进行原子减一,该操作被称为 P 操作。 当信号量值为 0 时,代表没有资源可用,P 操作…...
使用IntelliJ IDEA本地启动调试Flink流计算工程的2个异常解决
记录:471 场景:使用IntelliJ IDEA本地启动调试Flink流计算时,报错一:加载DataStream报错java.lang.ClassNotFoundException。报错二:No ExecutorFactory found to execute the application。 版本:JDK 1.…...
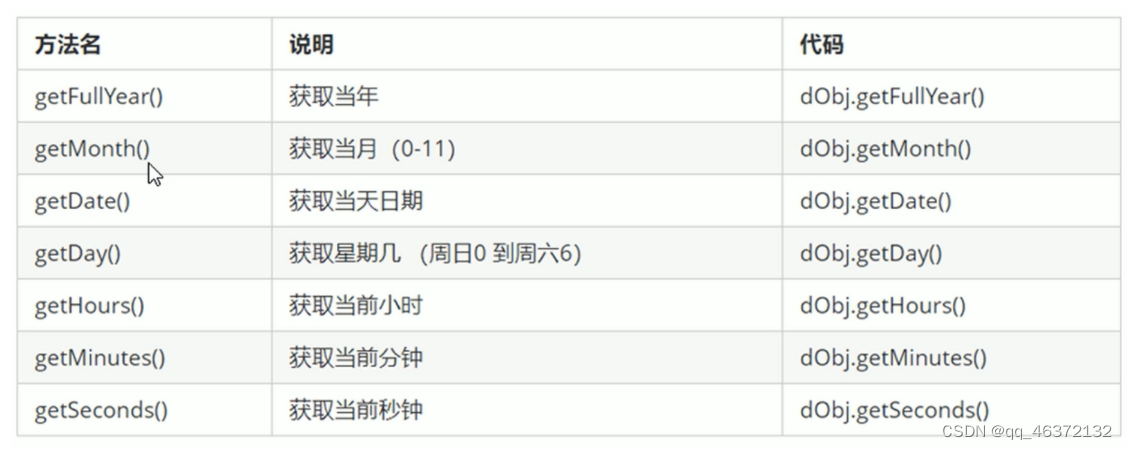
对象及日期对象
对象 1.什么是对象 类是对象的抽象,对象是类的实例 程序算法数据结构 万物皆对象,对象是一个具体的事物,看到见摸得着,对象是一组无序相关属性和方法的集合(无序,所以对象没有length属性),所有事物都是对象,列如字符串,数值,数组,函数等. 属性:事物的特征,在对象中用属性表…...

鼠标滚轮编码器解析
文章目录 前言一、鼠标滚轮编码器逻辑?二、使用步骤 1.引入库2.读入数据总结 前言 鼠标滚轮编码器为三脚接入,一个COM脚C(一般是接地),两个脉冲波形输入脚A、B,转动滚轮编码器会在两个脉冲输入脚上产生脉冲…...
【PTA】攀拓(PAT)- 程序设计(甲级)2023年春季考试
个人学习记录,代码难免不尽人意。 今天又斥资买了今年春季的真题一试,呃,感觉尽力了,89分,在当年排名23,感觉还不错,没有出现读不懂的题目和没有思路的情况,扣的11分分别是第二题两个…...

Spring Cloud Gateway 实现原理
Spring Cloud Gateway是Spring Cloud生态系统中的一个组件,用于构建基于Spring Boot的微服务架构中的网关服务。它的主要目的是提供一种灵活的方式来路由、过滤和转换HTTP请求,从而允许您构建强大、高性能的微服务应用程序。 以下是Spring Cloud Gatewa…...

嘉泰实业:真实低门槛,安全有保障
在互联网金融大行其道的当下,无论用户是多么的青睐、喜爱这种便捷的理财方式,也一定得把资金安全放在心上。要投就投那些实力背景雄厚,诚信经营的平台,可以选择投资用户基数庞大的理财老品牌,也可以选择发展势头迅猛的…...

spring boot 2.7 -> 3.0升级指南
spring boot提供一个版本迁移指南 2.7 -> 3.0...

MQTT 连接优化指南
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

算法和数据结构学习中的一些小的工具函数
算法和数据结构学习中的一些小的工具函数 作者:Grey 原文地址: 博客园:算法和数据结构学习中的一些小的工具函数 CSDN:算法和数据结构学习中的一些小的工具函数 提取一个数二进制最右侧的 1 比如二进制为:0100 0…...

解决2K/4K高分屏下Vmware等虚拟机下Kail Linux界面显示问题
问题现象 在我们日常使用VirtualBox、Vmware workstation、Hyper-V等虚拟机安装使用Kali系统,在2K/4K高分辨率电脑下Kali系统界面显示太小,包括各种软件及命令终端字体均无法很直观的看出,影响我们的正常测试及使用。 常规处理思路 很多人…...
【校招VIP】java语言考点之双亲委派模型
考点介绍: 双亲委派是校招面试中的高频考点之一。双亲委派机制定义: 当一个类加载器收到了类加载的请求的时候,他不会直接去加载指定的类,而是把这个请求委托给自己的父加载器去加载,只有父加载器无法加载这个类的时候࿰…...

2023年阿里云新用户云服务器价格表
阿里云,作为国内领先的云计算服务提供商,一直致力于为全球用户提供安全、稳定、高效的云计算服务。对于新用户来说,阿里云服务器是一个非常不错的选择。那么,阿里云新用户云服务器的价格是怎样的呢?本文将为大家详细介…...

信号相关名词概念汇总-采样周期、泄露、窗函数等
信号相关名词概念汇总-采样周期、泄露、窗函数等 以下为信号相关名词概念的汇总 1 名词解释 采样周期/间隔:采样频率的倒数,两次相邻采样之间的时间间隔采样时间:采样的总时长,即采样点数N和采样周期的乘积采样频率: …...

数字化新零售营销模式如何落地?数字化新零售营销功能推荐
通过科技手段,针对对线下零售店面的客户进行消费行为、频次等的分析,并进一步整合线上线下资源,实现实体零售的效率充分化,便是目前很火的新零售营销模式,能够将实体门店与数字化技术进行有机结合,通过为…...

712. 两个字符串的最小ASCII删除和 -- 动规
712. 两个字符串的最小ASCII删除和 class MinimumDeleteSum:"""712. 两个字符串的最小ASCII删除和https://leetcode.cn/problems/minimum-ascii-delete-sum-for-two-strings/"""def solution(self, s1: str, s2: str) -> int:""&qu…...

python中的小tips
1、注释 1、注释快捷键: Ctrl/ 可以注释掉光标所在的这一行,或者是选中的区域。 对于注释掉的这一行或者这一区域,按下ctrl/则会去掉注释。 2、多行注释 在写多行注释时,英文状态下写三个",会自动变成六个"&…...

高精度(加减乘除)
高精度算法出现的原因 当参与运算的数的范围大大的超出了标准数据类型,如int(-2147483648 ~ 2147483647)或者long long的范围,就需要使用高精度算法来进行数的运算。高精度运算的特点是代码长度比较长,本质是对数学运算…...
java企业数据管理系统
项目介绍 此项目为企业数据管理系统的后端部分,前端部分请参考vue-admin,项目实现了菜单管理、用户管理、角色管理和权限管理四个基础模块,前端菜单管理结合动态路由可自由添加菜单。结合Shiro权限管理实现了菜单和按钮的权限控制。 ❝ 前端…...

盖革计数器DIY套件故障排查与修复:从高压虚焊到辐射测试实践
1. 项目概述:从“不响”到“欢唱”的盖革计数器修复之旅作为一名在电子设计领域摸爬滚打了十几年的工程师,我桌上最让我安心的“白噪音”来源,不是风扇,也不是雨声模拟器,而是一台正在“咔哒咔哒”规律作响的盖革计数器…...

高性能事件存储引擎Chronicle:原理、部署与生产实践指南
1. 项目概述与核心价值最近在折腾日志和事件数据的管理,发现一个挺有意思的开源项目,叫tensakulabs/chronicle。这名字起得挺贴切,“编年史”,一听就知道是跟记录、存储历史事件相关的。简单来说,Chronicle 是一个高性…...

Claude智能优化器:提升大模型工具调用准确性的工程实践
1. 项目概述与核心价值最近在折腾大语言模型应用开发时,我一直在思考一个问题:如何让像Claude这样的顶级AI助手,在回答复杂问题时,能更稳定、更聪明地调用外部工具和函数?直接调用API,模型有时会“犯懒”或…...

硬件对齐的稀疏注意力机制:原理、优化与实践
1. 硬件对齐的稀疏注意力机制概述在自然语言处理领域,Transformer架构已成为主流,但其核心组件——注意力机制的计算复杂度随序列长度呈平方级增长,这成为处理长文本的主要瓶颈。传统全注意力(Full Attention)需要计算每个查询(Query)与所有键…...

稳压二极管数据手册参数深度解析:从符号到实战选型
1. 稳压二极管核心参数全解析 第一次拿到稳压二极管的数据手册时,我完全被那些密密麻麻的符号搞懵了。VZ、IZK、ZZT这些字母组合到底代表什么?后来在项目中踩过几次坑才明白,这些参数直接关系到电路的稳定性。就拿去年做的一个电源模块来说&a…...

美国司机监控基础设施复杂,多州出台隐私保护法律应对,你的隐私还好吗?
追踪美国司机监控现状追踪美国司机的监控基础设施如今已发展得远比多数人想象的复杂。最初简单的车牌记录技术,如今已演变成能识别面部、标记异常出行模式并构建详细活动档案的 AI 系统,且这一切都在被监控者毫不知情的情况下进行。据民权组织称…...

CAPL脚本中数据类型转换的实战解析:ASCII数组与字符串的精准互转
1. 为什么需要ASCII数组与字符串互转 在汽车电子测试领域,我们经常需要处理各种数据格式的转换。比如ECU返回的报文可能是以ASCII数组形式呈现的,而我们需要将其转换为可读的字符串进行分析;反过来,当我们需要发送特定指令时&…...

AI智能体编排平台OpenClaw-Core:构建标准化、可复用的AI工作流
1. 项目概述:从“单打独斗”到“交响乐团”的AI协作革命 如果你和我一样,在过去几年里深度使用过各种大语言模型,那你一定经历过这种“甜蜜的烦恼”:ChatGPT在创意写作上天马行空,但在代码生成上偶尔会“一本正经地胡说…...

Fabric 结合IPFS 链码示例
购买专栏前请认真阅读:《Fabric项目学习笔记》专栏介绍 package mainimport ("bytes""encoding/json""fmt""time""github.com/hyperledger/fabric/core/chaincode/shim"sc "github.com/hyperledger/fabric/protos/pee…...

【Perplexity Pro深度评测】:20年AI工具实战专家拆解3大隐藏成本与5个被忽略的高阶功能值不值得?
更多请点击: https://intelliparadigm.com 第一章:Perplexity Pro订阅值不值得 核心能力对比:免费版 vs Pro版 Perplexity Pro 提供实时联网搜索、多文件上传解析(PDF/DOCX/CSV)、无限次深度追问及自定义AI工作区等关…...