OpenCV(四十二):Harris角点检测
1.Harris角点介绍
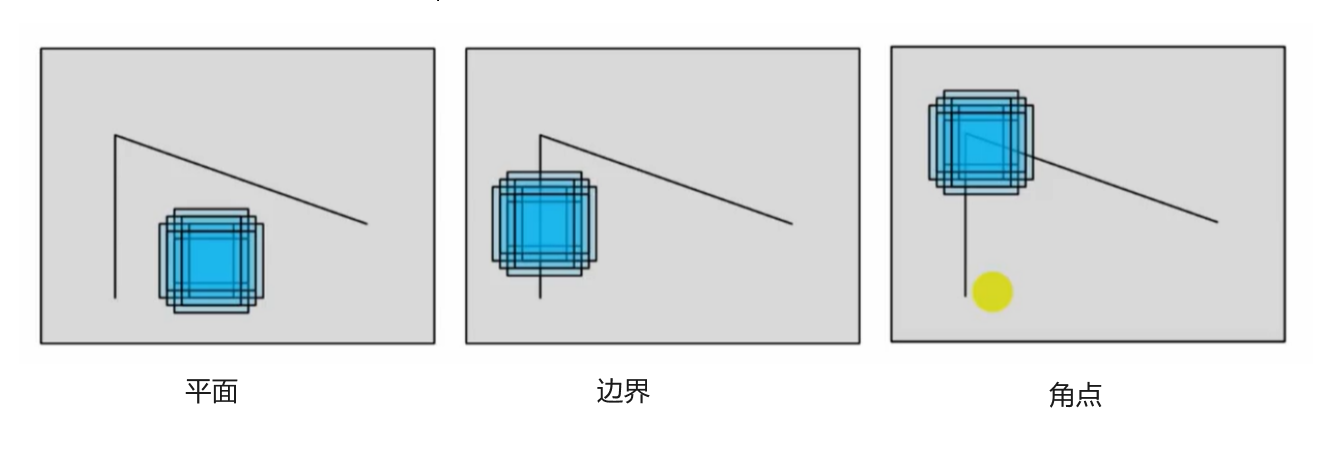
什么是角点? 角点指的是两条边的交点,图中红色圈起来的点就是角点。

Harris角点检测原理:首先定义一个矩形区域,然后将这个矩形区域放置在我的图像中,求取这个区域内所有的像素值之和,之后沿着多个方向移动我这个区域,再次计算新区域的像素值之和,如果移动前和移动后的像素值两者的差值比较小,那么就不是Harris角点,如果两者之间差值比较大,就认定移动前覆盖的区域内存在Harris角点。
如图:下图两条线形成角点,而矩形区域分别表示平面、边界、角点三种位置:
2.Harris角点计算
Harris角点检测原理:当移动窗口,窗口内像素值变化大就有Harris角点
Harris角点检测原理公式:
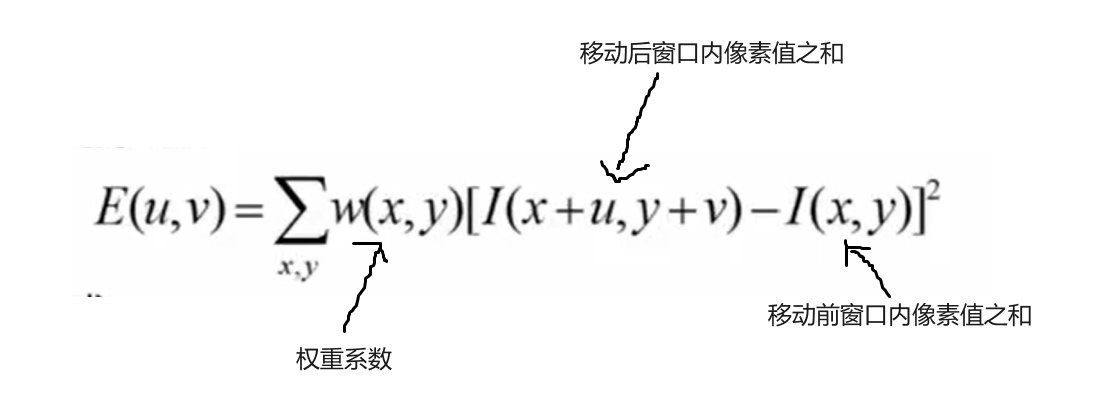
权重系数的引入是为了更加方便地去确定某一个点是Harris角点。
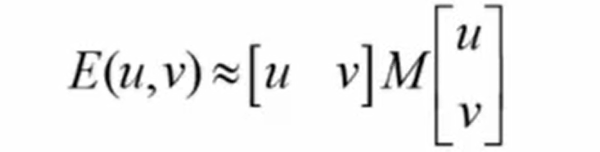
Harris角点检测原理公式写成矩阵形式:
由此可得出梯度协方差矩阵M
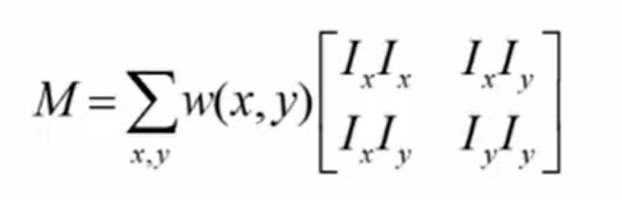
Harris评价函数来测量每个像素的角点程度 ,与梯度协方差矩阵M相关

在这个公式中,R是角点响应函数的值,M是一个2x2的矩阵,描述了局部区域中像素的梯度信息,det(M)表示矩阵的行列式,trace(M)表示矩阵的迹,k是一个常数,用于调节响应函数的敏感度。
Harris评价函数可以用特征向量来表示。λ1和λ2分别是M的两个特征值。

通过对特征值λ1和λ2进行求解,我们可以计算Harris评价函数R,并据此来判断像素是否为角点。
- 当λ1和λ2都较大且接近时,表示图像局部区域存在角点。
- 当λ1和λ2都比较小或者差异较大时,表示图像局部区域是平坦或者边缘区域。
3.检测Harris角点函数cornerHarris()
void cv::cornerHarris ( InputArray src,
OutputArray dst,
int blockSize,
int ksize,
double K,
int borderType = BORDER_DEFAULT
)
- src:待检测Harris角点的输入图像,图像必须是CV 8U或者CV 32F的单通道灰度图像
- dst: 存放Harris评价系数的R矩阵,数据类型为CV 32F的单通道图像,与输入图像具有相同的尺寸
- blockSize:邻域大小
- ksize: Sobel算子的半径,用于得到梯度信息
- k:计算Harris评价系数R的权重系数
- borderType:像素外推算法标志
4.绘制角点函数drawKeypoints()
void drawKeypoints(InputArray image,
const std::vector<KeyPoint>& keypoints,
OutputArray outImage,
const Scalar& color = Scalar::all(-1),
int flags = DrawMatchesFlags::DEFAULT
)
参数说明:
-
image: 输入图像,可以是任意类型的Mat对象。
-
keypoints: vector类型的关键点,每个关键点包含其在图像中的位置和其他信息(如尺度、方向等)。
-
outImage: 输出图像,用于存储绘制了特征点的图像。可以与输入图像相同的尺寸和类型。
-
color: 绘制特征点的颜色,可以是Scalar对象或CV_RGB(R, G, B)宏定义,默认为Scalar::all(-1)表示随机颜色。
-
flags: 绘制标志,用于控制绘制方式。可以是以下常量之一:
-
DrawMatchesFlags::DEFAULT: 默认绘制方式,显示关键点的位置和大小。
-
DrawMatchesFlags::DRAW_OVER_OUTIMG: 将关键点绘制在输出图像上,而不是创建新的输出图像。
-
DrawMatchesFlags::DRAW_RICH_KEYPOINTS: 绘制丰富的特征点,显示位置、尺度、方向等详细信息。
-
5.示例代码:
void Harris_f(Mat image){//转成灰度图像Mat gray;cvtColor(image,gray,COLOR_BGR2GRAY);// 执行Harris角点检测Mat harris;cornerHarris(gray,harris,2,3,0.04);//归一化便于进行数值比较和结果显示Mat harrisn;normalize(harris,harrisn,0,255,NORM_MINMAX);//将图像的数据类型变成CV_8UconvertScaleAbs(harrisn,harrisn);//寻找Harris角点vector<KeyPoint> keyPoints;for(int row=0;row<harrisn.rows;row++){for(int col=0;col<harrisn.cols;col++){int R=harrisn.at<uchar>(row,col);if(R<180){//将角点存入KeyPoint中KeyPoint keyPoint;keyPoint.pt.y=row;keyPoint.pt.x=col;keyPoints.push_back(keyPoint);}}}//绘制角点drawKeypoints(image,keyPoints,image,Scalar(0,0,255,255));//与显示结果imwrite("/sdcard/DCIM/harrisn.png",harrisn);imwrite("/sdcard/DCIM/result.png",image);
}


(系数矩阵) (绘制Harris角点)
相关文章:
OpenCV(四十二):Harris角点检测
1.Harris角点介绍 什么是角点? 角点指的是两条边的交点,图中红色圈起来的点就是角点。 Harris角点检测原理:首先定义一个矩形区域,然后将这个矩形区域放置在我的图像中,求取这个区域内所有的像素值之和,之…...
C++数据结构题:DS 顺序表--连续操作
建立顺序表的类,属性包括:数组、实际长度、最大长度(设定为 1000 ) 该类具有以下成员函数: 构造函数:实现顺序表的初始化。 插入多个数据的 multiinsert(int i, int n, int item[]) 函数,实…...

DM@命题公式@主范式的性质和应用@数理逻辑解决数字电路全加器问题
文章目录 abstract主合取范式与主析取范式间的关系👺主范式存在及唯一性定理例 主范式的性质👺求公式的成真与成假赋值主析取范式直接得到主合取范式 判断公式的类型 n n n元命题公式的主析取范式(主合取范式)的个数判断两个命题公式是否等值 给出一个满…...

基于微信小程序+Springboot线上租房平台设计和实现【三端实现小程序+WEB响应式用户前端+后端管理】
博主介绍:✌全网粉丝30W,csdn特邀作者、博客专家、CSDN新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取源码联系🍅 👇🏻 精彩专…...
Xilinx FPGA 7系列 GTX/GTH Transceivers (2)--IBERT
IBERT GTX IBERT核心提供了基础广泛的物理介质附件(PMA)评估7系列FPGA GTX收发器的演示平台。可参数化以使用不同GTX收发器和时钟拓扑,IBERT核心也可以定制使用不同的线速率、参考时钟速率和逻辑宽度。数据模式生成器和每个所需的GTX收发器都包含了检查程序,给出了几个不同…...

Python 文件介绍和正则表达式
文章目录 Python 文件和正则表达式文件打开文件读取文件直接读取 read():逐行读取采用 **for** 循环:采用 readlines(): 正则表达式匹配规则re 模块match 方法:search 方法group 方法split 方法编译:compile 方法 Pyth…...
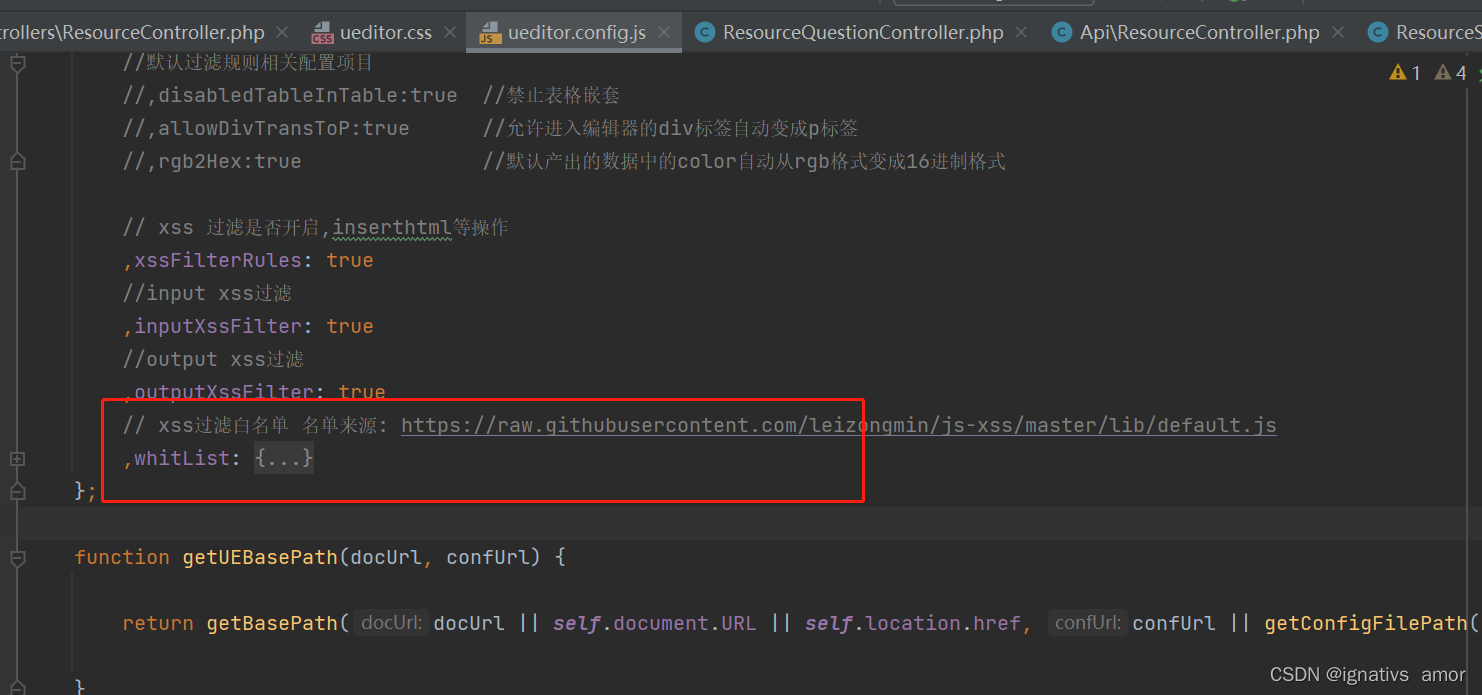
ueditor百度富文本编辑器粘贴后html丢失class和style样式
问题 项目经理从123在线编辑上排版好的文章,粘贴到项目的编辑器上,样式完全乱了, 排版是这样的: 复制到ueditor后的格式: 这天差地别呀,于是打开代码模式,发现section的属性全没了 但是,sp…...

人脸自动贴国旗
(一)简介 国庆快到了,每年这个时候,大家的头像都会贴上国旗水印,然后我就像这刚好可以用opencv dilb实现一个简单的自动将国旗贴在人脸上,刚好配合gradio写一个简单的demo gradio官方文档 (…...
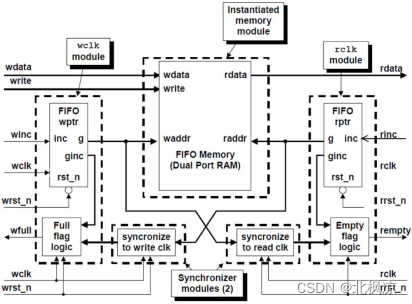
异步FIFO设计
1 FIFO简介 FIFO的本质是RAM,具有先进先出的特性。 FIFO的基本使用原则:空时不能读,满时不能写 FIFO的两个重要参数:宽度和深度 FIFO的两种类型: 同步FIFO:读写时钟相同,通常用来做数据缓存…...

学习python和anaconda的经验
PYTHON 1 常用命令 1.1 1.1 注释 Python注释多行的方法有以下三种:使用ctrl+/实现多行注释、在每一行的开头使用shift+#键、输入’‘’ ‘’或者"“” “”",将要注释的代码插在中间 1.2 def init( ):函数 区分两个函数: 1.def init(self): 这种形式在__init_…...

【Linux】多线程【上】
文章目录 前言1、Linux线程概念1-1、什么是线程?1-1-1、如何看待页表1-1-2、回顾进程地址空间1-1-3、页表怎么进行虚拟地址到物理地址的映射的?1-1-4、Linux中线程的概念(重点)1-1-5、原生线程库1-1-6、代码测试1-1-7、知识点&…...
生成式人工智能在高等教育 IT 中的作用
作者:Jared Pane 通过将你大学的数据与公共 LLMs 和 Elasticsearch 安全集成来找到你需要的答案。 根据 2023 年 4 月 EDUCAUSE 的一项调查,83% 的受访者表示,生成式人工智能将在未来三到五年内深刻改变高等教育。 学术界很快就询问和想象生…...

黑龙江省DCMM认证、CSMM认证、CMMM认证、知识产权等政策奖励
2023年8月28日 为深入落实党的二十大精神,认真落实省第十三次党代会关于创新龙江建设的部署要求,全面贯彻新发展理念,融入和服务构建新发展格局,实施创新驱动发展战略,着力建设创新龙江,不断塑造振兴发展新…...

腾讯云2023年云服务器优惠活动价格表
腾讯云经常推出各种云产品优惠活动,为了帮助大家更好地了解腾讯云服务器的价格和优惠政策,下面给大家分享腾讯云最新云服务器优惠活动价格表,助力大家轻松上云! 一、轻量应用服务器优惠活动价格表 1、轻量应用服务器:…...

Sleuth--链路追踪
1 链路追踪介绍 在大型系统的微服务化构建中,一个系统被拆分成了许多模块。这些模块负责不同的功能,组合成系统,最终可以提供丰富的功能。在这种架构中,一次请求往往需要涉及到多个服务。互联网应用构建在不同的软件模块集上&…...
MyBatis初级
文章目录 一、mybatis1、概念2、JDBC缺点2.1、之前jdbc操作2.2 、原始jdbc操作的分析 3、mybatis的使用3.1、导入maven依赖3.2、新建表3.3、实体类3.4、编写mybatis的配置文件3.5、编写接口 和 映射文件3.6、编写测试类3.7、注意事项 4、代理方式开发5、mybatis和spring整合5.1…...
AOP)
Spring 学习(二)AOP
一、什么是AOP Aspect Oriented Programming,即面向切面编程。对一个大型项目的代码而言,整个系统要求关注安全检查、日志、事务等功能,这些功能实际上“横跨”多个业务方法。在一般的OOP编程里,需要在每一个业务方法内添加相关非…...
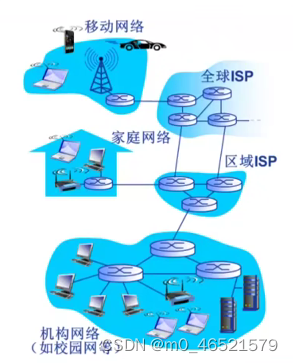
笔记1.1 计算机网络基本概念
计算机网络是通信技术与计算机技术紧密结合的产物 通信系统模型: 计算机网络是一种通信网络 计算机网络是互连的、自洽的计算机集合。 互连:互联互通 自洽:无主从关系 通过交换网络互连主机 Internet:数以百万计的互连的计算设…...
液压切管机配套用液压泵站比例阀放大器
液压切管机配套用液压泵站是液压系统的动力源,可按机械设备工况需要提供一定压力、流量和清洁度的工作介质。它由泵组、油箱组件、控温组件、滤油器组件及蓄能器组件等组合而成,液压泵站主要服务于大型管道工程。...

C++ Primer Plus 第七章笔记
目录 函数基本知识 没有返回值的函数:void函数 有返回值的函数: 函数原型 1.为什么需要函数原型? 2.函数原型的语法 3.函数原型的功能 按值传递函数参数 形参和实参 局部变量 参数问题 使用const指针参数 调用自身的函数…...

支持多渠道的语音机器人 2026 企业选型攻略:智能核心引擎
在客户体验驱动业务增长的时代,企业热线早已不是“有人接电话”那么简单。随着大模型技术与通信系统的深度融合,多渠道语音机器人正从传统的“按键导航”进化为能够理解情绪、动态决策的智能客服专家。2026年,如何选择一款真正适配业务场景、…...

从FinFET到ESD设计:2013年半导体产业技术演进与工程实践启示
1. 行业动态聚焦:2013年4月,EDA/IP领域的那些关键信号作为一名在芯片设计行业摸爬滚打了十几年的老兵,我习惯每周花点时间翻翻行业新闻,不是为了追热点,而是想从那些看似零散的公告里,嗅出技术演进和产业协…...
一种新型傅里叶邻接Transformer用于脑电情绪识别
该片文章是频域先验 空间拓扑 Transformer在 EEG 情绪识别的里程碑,针对现有模型频域特征挖掘不足、Transformer 缺乏归纳偏置、跨被试泛化差三大核心痛点,提出傅里叶邻接 Transformer(FAT),在 SEED、DEAP 数据集上刷…...
)
避坑指南:Vivado FIR Compiler IP核配置的那些‘坑’(从MATLAB系数到FPGA实现)
Vivado FIR滤波器IP核实战避坑手册:从MATLAB系数到FPGA部署的12个关键检查点 当MATLAB的完美频响曲线遇上Vivado的硬件实现,FIR滤波器设计往往会遭遇理想与现实的落差。本文不重复基础操作流程,而是聚焦于那些让工程师深夜加班的典型问题场景…...

IC测试插座技术解析与市场应用实践
1. 行业背景与奖项意义解析在电子制造领域,互连产品如同精密仪器中的"神经末梢",承担着信号传输与能量供给的关键职能。IC测试插座和老化插座作为其中的核心组件,其性能直接影响半导体器件从研发验证到批量生产的全流程可靠性。这类…...

任天堂Switch游戏文件管理终极指南:NSC_BUILDER一站式解决方案
任天堂Switch游戏文件管理终极指南:NSC_BUILDER一站式解决方案 【免费下载链接】NSC_BUILDER Nintendo Switch Cleaner and Builder. A batchfile, python and html script based in hacbuild and Nuts python libraries. Designed initially to erase titlerights …...

ARM调试寄存器DBGCLAIMCLR详解与应用
1. ARM调试寄存器概述 在嵌入式系统开发中,调试寄存器是连接开发者和硬件的重要桥梁。作为ARM架构调试系统的核心组件,DBGCLAIMCLR这类专用寄存器提供了底层硬件级别的调试能力。不同于普通的存储器映射寄存器,调试寄存器通过系统寄存器空间进…...

高效配置实战指南:全面掌握Cursor Pro功能解锁的专业部署方案
高效配置实战指南:全面掌握Cursor Pro功能解锁的专业部署方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached y…...
Gemini实时语音转录+Pixel硬件级降噪,会议记录准确率提升至99.2%,你还在手动整理?
更多请点击: https://intelliparadigm.com 第一章:Gemini实时语音转录Pixel硬件级降噪,会议记录准确率提升至99.2%,你还在手动整理? Google Pixel 系列手机搭载的硬件级降噪芯片(如 Tensor G3 的 Spectral…...

解读民法典基本规定第十条
民法典: 第一编 总则,第一章 基本规定 第十条 处理民事纠纷,应当依照法律;法律没有规定的,可以适用习惯,但是不得违背公序良俗。 一句话核心 先按国法判,国法没写明白,就按当地老规矩、民间习俗…...