Stable-Baselines 3 部分源代码解读 2 on_policy_algorithm.py
Stable-Baselines 3 部分源代码解读 ./common/on_policy_algorithm.py
前言
阅读PPO相关的源码,了解一下标准库是如何建立PPO算法以及各种tricks的,以便于自己的复现。
在Pycharm里面一直跳转,可以看到PPO类是最终继承于基类,也就是这个py文件的内容。
所以阅读源码就先从这里开始。: )
import 包
import sys
import time
from typing import Any, Dict, List, Optional, Tuple, Type, TypeVar, Unionimport numpy as np
import torch as th
from gym import spacesfrom stable_baselines3.common.base_class import BaseAlgorithm
from stable_baselines3.common.buffers import DictRolloutBuffer, RolloutBuffer
from stable_baselines3.common.callbacks import BaseCallback
from stable_baselines3.common.policies import ActorCriticPolicy
from stable_baselines3.common.type_aliases import GymEnv, MaybeCallback, Schedule
from stable_baselines3.common.utils import obs_as_tensor, safe_mean
from stable_baselines3.common.vec_env import VecEnv
OnPolicyAlgorithm 类
这个类是PPO算法类的中间曾,夹在底层基类和上层PPO类的之间。
主要是同策略算法,例如:A2C和PPO算法。
policy、env和learning_rate三者与基类base-class.py的一致
n_steps表示每次更新前需要经过的时间步,作者在这里给出了n_steps * n_envs的例子,可能的意思是,如果环境是重复的多个,打算做并行训练的话,那么就是每个子环境的时间步乘以环境的数量
batch_size经验回放的最小批次信息
gamma、gae_lambda、clip_range、clip_range_vf均是具有默认值的参数,分别代表“折扣因子”、“GAE奖励中平衡偏置和方差的参数”、“为网络参数而限制幅度的范围”、“为值函数网络参数而限制幅度的范围”
normalize_advantage标志是否需要归一化优势(advantage)
ent_coef、vf_coef损失计算的熵系数
max_grad_norm最大的梯度长度,梯度下降的限幅
use_sde、sde_sample_freq是状态独立性探索,只适用于连续环境,与基类base-class.py的一致
target_kl限制每次更新时KL散度不能太大,因为clipping限幅不能防止大量更新
monitor_wrapper标志是否需要Gym库提供的监视器包装器
_init_setup_model是否建立模型,也就是是否在创建这个实例过程中创建初始化模型
class OnPolicyAlgorithm(BaseAlgorithm):"""The base for On-Policy algorithms (ex: A2C/PPO).:param policy: The policy model to use (MlpPolicy, CnnPolicy, ...):param env: The environment to learn from (if registered in Gym, can be str):param learning_rate: The learning rate, it can be a functionof the current progress remaining (from 1 to 0):param n_steps: The number of steps to run for each environment per update(i.e. batch size is n_steps * n_env where n_env is number of environment copies running in parallel):param gamma: Discount factor:param gae_lambda: Factor for trade-off of bias vs variance for Generalized Advantage Estimator.Equivalent to classic advantage when set to 1.:param ent_coef: Entropy coefficient for the loss calculation:param vf_coef: Value function coefficient for the loss calculation:param max_grad_norm: The maximum value for the gradient clipping:param use_sde: Whether to use generalized State Dependent Exploration (gSDE)instead of action noise exploration (default: False):param sde_sample_freq: Sample a new noise matrix every n steps when using gSDEDefault: -1 (only sample at the beginning of the rollout):param tensorboard_log: the log location for tensorboard (if None, no logging):param monitor_wrapper: When creating an environment, whether to wrap itor not in a Monitor wrapper.:param policy_kwargs: additional arguments to be passed to the policy on creation:param verbose: Verbosity level: 0 for no output, 1 for info messages (such as device or wrappers used), 2 fordebug messages:param seed: Seed for the pseudo random generators:param device: Device (cpu, cuda, ...) on which the code should be run.Setting it to auto, the code will be run on the GPU if possible.:param _init_setup_model: Whether or not to build the network at the creation of the instance:param supported_action_spaces: The action spaces supported by the algorithm."""def __init__(self,policy: Union[str, Type[ActorCriticPolicy]],env: Union[GymEnv, str],learning_rate: Union[float, Schedule],n_steps: int,gamma: float,gae_lambda: float,ent_coef: float,vf_coef: float,max_grad_norm: float,use_sde: bool,sde_sample_freq: int,tensorboard_log: Optional[str] = None,monitor_wrapper: bool = True,policy_kwargs: Optional[Dict[str, Any]] = None,verbose: int = 0,seed: Optional[int] = None,device: Union[th.device, str] = "auto",_init_setup_model: bool = True,supported_action_spaces: Optional[Tuple[spaces.Space, ...]] = None,):super().__init__(policy=policy,env=env,learning_rate=learning_rate,policy_kwargs=policy_kwargs,verbose=verbose,device=device,use_sde=use_sde,sde_sample_freq=sde_sample_freq,support_multi_env=True,seed=seed,tensorboard_log=tensorboard_log,supported_action_spaces=supported_action_spaces,)self.n_steps = n_stepsself.gamma = gammaself.gae_lambda = gae_lambdaself.ent_coef = ent_coefself.vf_coef = vf_coefself.max_grad_norm = max_grad_normself.rollout_buffer = None# 调用基类的_setup_model()模型if _init_setup_model:self._setup_model()def _setup_model(self) -> None:# 初始化学习率,让他可以调用self._setup_lr_schedule()# 设置随机数种子self.set_random_seed(self.seed)# 设置经验池子的类,如果观测空间是spaces.Dict类那么就赋值DictRolloutBuffer# 如果观测空间不是spaces.Dict类那么就赋值RolloutBufferbuffer_cls = DictRolloutBuffer if isinstance(self.observation_space, spaces.Dict) else RolloutBuffer# 根据类初始化实例经验池子# 初始化经验池子的是时候将设备信息、折扣率、GAE超参数和环境的数量也传进去了self.rollout_buffer = buffer_cls(self.n_steps,self.observation_space,self.action_space,device=self.device,gamma=self.gamma,gae_lambda=self.gae_lambda,n_envs=self.n_envs,)# 初始化策略,直接输入状态空间、动作空间、可调用的学习率、是否使用状态独立性探索,以及自己制定策略# 的时候自己家的模型的参数和激活函数self.policy = self.policy_class( # pytype:disable=not-instantiableself.observation_space,self.action_space,self.lr_schedule,use_sde=self.use_sde,**self.policy_kwargs # pytype:disable=not-instantiable)# 将策略放到GPU/CPU中self.policy = self.policy.to(self.device)def collect_rollouts(self,env: VecEnv,callback: BaseCallback,rollout_buffer: RolloutBuffer,n_rollout_steps: int,) -> bool:# 收集环境交互数据# 这个方法使用当前的策略并将交互历史填充到RolloutBuffer经验池子中# rollout的意思是无模型的概念,而不是有模型的RL或规划里面的rollout的概念# env 用于训练的环境# callback 在每个时间步都会调用的回调函数# rollout_buffer 将收集的经验放置到rollout_buffer中# 在每个环境中需要收集的条数# 返回值是True:如果rollout_buffer收集了这么多的经验;返回值是False:如果回调函数提前终止了# 这个rollouts。"""Collect experiences using the current policy and fill a ``RolloutBuffer``.The term rollout here refers to the model-free notion and should notbe used with the concept of rollout used in model-based RL or planning.:param env: The training environment:param callback: Callback that will be called at each step(and at the beginning and end of the rollout):param rollout_buffer: Buffer to fill with rollouts:param n_rollout_steps: Number of experiences to collect per environment:return: True if function returned with at least `n_rollout_steps`collected, False if callback terminated rollout prematurely."""assert self._last_obs is not None, "No previous observation was provided"# 将策略转变到评估模式# Switch to eval mode (this affects batch norm / dropout)self.policy.set_training_mode(False)# 重置经验池子,如果使用状态独立性探索,那么就重置策略的噪声n_steps = 0rollout_buffer.reset()# Sample new weights for the state dependent explorationif self.use_sde:self.policy.reset_noise(env.num_envs)# 回调函数执行on_rollout_start()命令,跳转定义时候没有看到具体定义callback.on_rollout_start()while n_steps < n_rollout_steps:# 如果使用了状态独立性探索,并且达到了探索频率的节点,那么就重置策略的噪声if self.use_sde and self.sde_sample_freq > 0 and n_steps % self.sde_sample_freq == 0:# Sample a new noise matrixself.policy.reset_noise(env.num_envs)# 在断开梯度的情况下,转换观测数据到tensor张量内,然后输入到策略中输出动作、价值和对数概率# 最后再将动作数据转移到numpy中with th.no_grad():# Convert to pytorch tensor or to TensorDictobs_tensor = obs_as_tensor(self._last_obs, self.device)actions, values, log_probs = self.policy(obs_tensor)actions = actions.cpu().numpy()# Rescale and perform action# 归一化动作信息,限制在动作空间的上下界clipped_actions = actions# Clip the actions to avoid out of bound errorif isinstance(self.action_space, spaces.Box):clipped_actions = np.clip(actions, self.action_space.low, self.action_space.high)# 将动作信息输入到环境中,输出新的观测、奖励数值、是否完成以及其他信息。new_obs, rewards, dones, infos = env.step(clipped_actions)# 处理回调函数和更新经验池子self.num_timesteps += env.num_envs# Give access to local variablescallback.update_locals(locals())if callback.on_step() is False:return Falseself._update_info_buffer(infos)n_steps += 1# 如果动作空间是离散空间的话,那么就转变成一个列向量if isinstance(self.action_space, spaces.Discrete):# Reshape in case of discrete actionactions = actions.reshape(-1, 1)# 判断数据是否是终止的# 终止之后计算累计奖励# Handle timeout by bootstraping with value function# see GitHub issue #633for idx, done in enumerate(dones):if (doneand infos[idx].get("terminal_observation") is not Noneand infos[idx].get("TimeLimit.truncated", False)):terminal_obs = self.policy.obs_to_tensor(infos[idx]["terminal_observation"])[0]with th.no_grad():terminal_value = self.policy.predict_values(terminal_obs)[0]rewards[idx] += self.gamma * terminal_value# 经验池子输入的是上一个状态、动作、奖励、上一个回合的开始状态、价值列表以及对数概率rollout_buffer.add(self._last_obs, actions, rewards, self._last_episode_starts, values, log_probs)self._last_obs = new_obsself._last_episode_starts = dones# 计算下一个状态的价值with th.no_grad():# Compute value for the last timestepvalues = self.policy.predict_values(obs_as_tensor(new_obs, self.device))# 计算回报和优势rollout_buffer.compute_returns_and_advantage(last_values=values, dones=dones)callback.on_rollout_end()return Truedef train(self) -> None:# 这个是父类的方法# 在子类的实际PPO类中做了重写"""Consume current rollout data and update policy parameters.Implemented by individual algorithms."""raise NotImplementedErrordef learn(self: SelfOnPolicyAlgorithm,total_timesteps: int,callback: MaybeCallback = None,log_interval: int = 1,tb_log_name: str = "OnPolicyAlgorithm",reset_num_timesteps: bool = True,progress_bar: bool = False,) -> SelfOnPolicyAlgorithm:iteration = 0# 初始化模型total_timesteps, callback = self._setup_learn(total_timesteps,callback,reset_num_timesteps,tb_log_name,progress_bar,)callback.on_training_start(locals(), globals())while self.num_timesteps < total_timesteps:# 这里开始执行上面的函数,在环境中收集数据,收集完了就继续训练# 如果出了故障了,就在接下来跳出循环continue_training = self.collect_rollouts(self.env, callback, self.rollout_buffer, n_rollout_steps=self.n_steps)if continue_training is False:break# 跌带次数+1,并根据当前的训练次数更新学习率iteration += 1self._update_current_progress_remaining(self.num_timesteps, total_timesteps)# 在控制台按照预先定义的频率输出相关信息# Display training infosif log_interval is not None and iteration % log_interval == 0:time_elapsed = max((time.time_ns() - self.start_time) / 1e9, sys.float_info.epsilon)fps = int((self.num_timesteps - self._num_timesteps_at_start) / time_elapsed)self.logger.record("time/iterations", iteration, exclude="tensorboard")if len(self.ep_info_buffer) > 0 and len(self.ep_info_buffer[0]) > 0:self.logger.record("rollout/ep_rew_mean", safe_mean([ep_info["r"] for ep_info in self.ep_info_buffer]))self.logger.record("rollout/ep_len_mean", safe_mean([ep_info["l"] for ep_info in self.ep_info_buffer]))self.logger.record("time/fps", fps)self.logger.record("time/time_elapsed", int(time_elapsed), exclude="tensorboard")self.logger.record("time/total_timesteps", self.num_timesteps, exclude="tensorboard")self.logger.dump(step=self.num_timesteps)self.train()callback.on_training_end()return selfdef _get_torch_save_params(self) -> Tuple[List[str], List[str]]:state_dicts = ["policy", "policy.optimizer"]return state_dicts, []
相关文章:

Stable-Baselines 3 部分源代码解读 2 on_policy_algorithm.py
Stable-Baselines 3 部分源代码解读 ./common/on_policy_algorithm.py 前言 阅读PPO相关的源码,了解一下标准库是如何建立PPO算法以及各种tricks的,以便于自己的复现。 在Pycharm里面一直跳转,可以看到PPO类是最终继承于基类,也…...
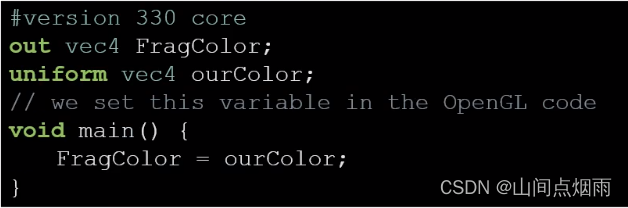
15. Qt中OPenGL的参数传递问题
1. 说明 在OPenGL中,需要使用GLSL语言来编写着色器的函数,在顶点着色器和片段着色器之间需要参数值的传递,且在CPU中的数据也需要传递到顶点着色器中进行使用。本文简单介绍几种参数传递的方式: (本文内容仅个人理解&…...
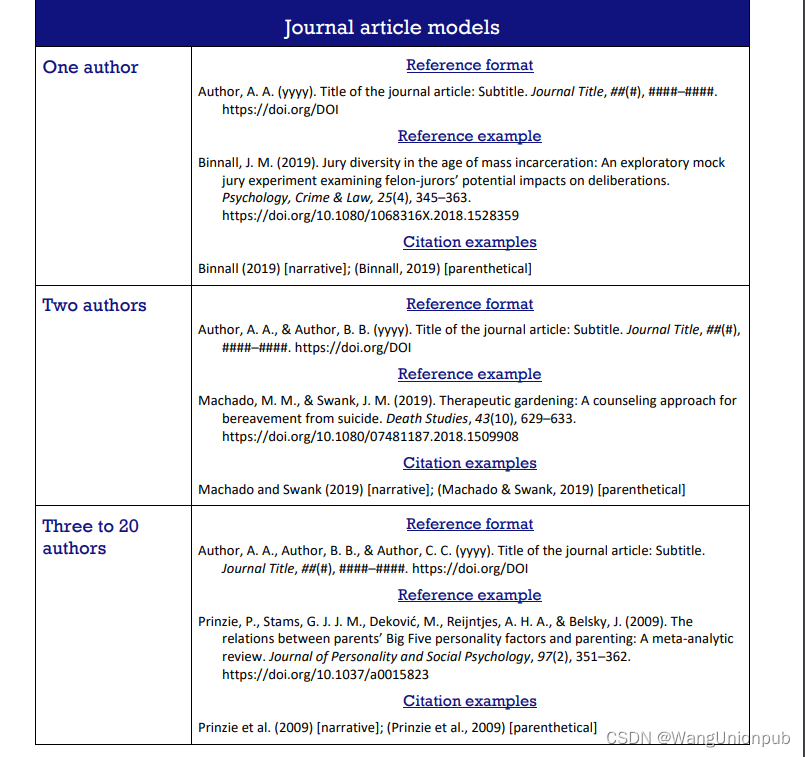
注意,这本2区SCI期刊最快18天录用,还差一步录用只因犯了这个错
发表案例分享: 2区医学综合类SCI,仅18天录用,录用后28天见刊 2023.02.10 | 见刊 2023.01.13 | Accepted 2023.01.11 | 提交返修稿 2022.12.26 | 提交论文至期刊部系统 录用截图来源:期刊部投稿系统 见刊截图来源:…...
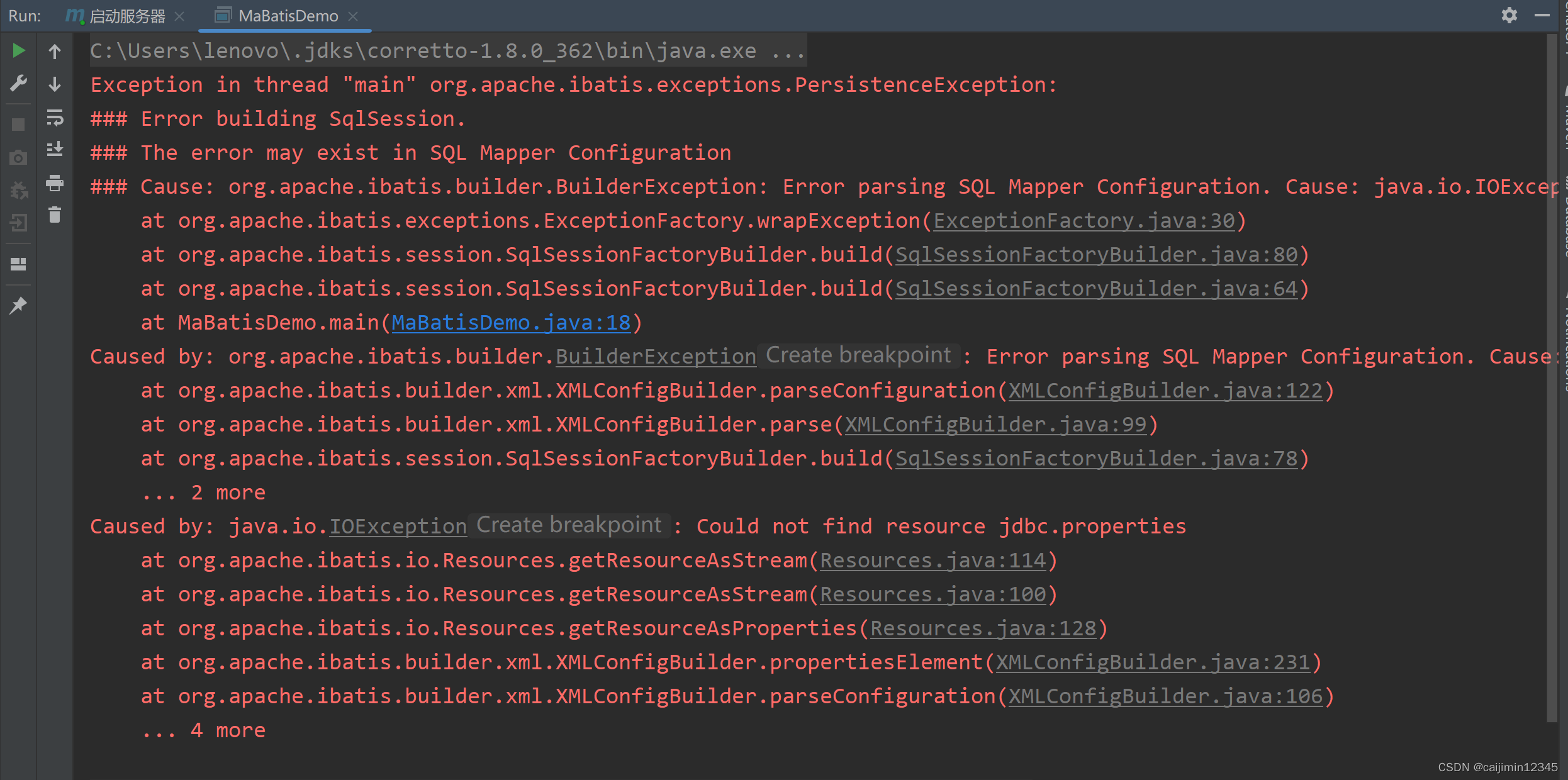
Could not find resource jdbc.properties问题的解决
以如下开头的内容: Exception in thread "main" org.apache.ibatis.exceptions.PersistenceException: ### Error building SqlSession. ### The error may exist in SQL Mapper Configuration 出现以上问题是没有在src/main/resources下创建jdbc.prop…...
也一定为true吗?泛型特点与好处)
【面试题】==与equals区别、Hashcode作用、hashcode相同equals()也一定为true吗?泛型特点与好处
文章目录1. 和 equals 的区别是什么?2.Hashcode的作用3. 两个对象的hashCode() 相同, 那么equals()也一定为 true吗?4.泛型常用特点5.使用泛型的好处?1. 和 equals 的区别是什么? “” 对于基本类型和引用类型 的作…...

Flex布局中的flex属性
1.flex-grow,flex-shrink,flex-basis取值含义 flex-grow: 延申性描述。在满足“延申条件”时,flex容器中的项目会按照设置的flex-grow值的比例来延申,占满容器剩余空间。 取值情况: 取负值无效。取0值表示不…...

SpringBoot + Ant Design Pro Vue实现动态路由和菜单的前后端分离框架
Ant Design Pro Vue默认路由和菜单配置是采用中心化的方式,在 router.config.js统一配置和管理,同时也提供了动态获取路由和菜单的解决方案,并将在2.0.3版本中提供,因到目前为止,官方发布的版本为2.0.2,所以…...

robotframework自动化测试环境搭建
环境说明 win10 python版本:3.8.3rc1 安装清单 安装配置 selenium安装 首先检查pip命令是否安装: C:\Users\name>pipUsage:pip <command> [options]Commands:install Install packages.download Do…...
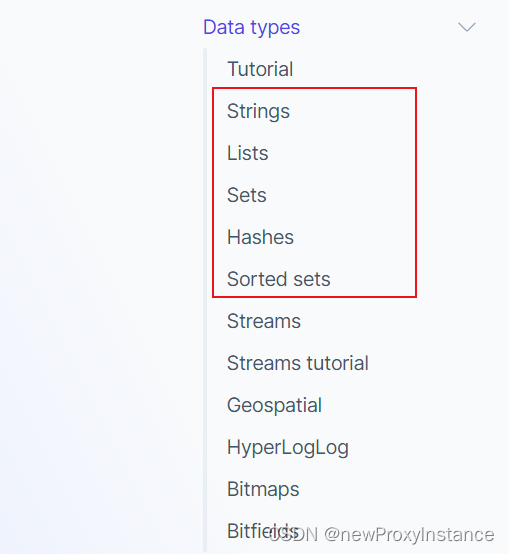
尚硅谷《Redis7》(小白篇)
尚硅谷《Redis7 》(小白篇) 02 redis 是什么 官方网站: https://redis.io/ 作者 Git Hub https://github.com/antirez 03 04 05 能做什么 06 去哪下 Download https://redis.io/download/ redis中文文档 https://www.redis.com.cn/docu…...

并非从0开始的c++ day6
并非从0开始的c day6二级指针练习-文件读写位运算位逻辑运算符按位取反 ~位于(AND):&位或(OR): |位异或: ^移位运算符左移<<右移>>多维数组一维数组数组名一维数组名传入到函数参数中数组指…...

PMP考前冲刺2.22 | 2023新征程,一举拿证
承载2023新一年的好运让我们迈向PMP终点一起冲刺!一起拿证!每日5道PMP习题助大家上岸PMP!!!题目1-2:1.在新产品开发过程中,项目经理关注到行业排名第一的公司刚刚发布同类型的产品。相比竞品&am…...

RxJava的订阅过程
要使用Rxjava首先要导入两个包,其中rxandroid是rxjava在android中的扩展 implementation io.reactivex:rxandroid:1.2.1implementation io.reactivex:rxjava:1.2.0首先从最基本的Observable的创建到订阅开始分析 Observable.create(new Observable.OnSubscribe<S…...

【2.22】MySQL、Redis、动态规划
认识Redis Redis是一种基于内存的数据库,对数据的读写操作都是在内存中完成的,因此读写速度非常快,常用于缓存,消息队列,分布式锁等场景。 Redis提供了多种数据类型来支持不同的业务场景,比如String(字符串…...
2年手动测试,裸辞后找不到工作怎么办?
我们可以从以下几个方面来具体分析下,想通了,理解透了,才能更好的利用资源提升自己。一、我会什么?先说第一个我会什么?第一反应:我只会功能测试,在之前的4年的中我只做了功能测试。内心存在一种…...

Leetcode6. N字形变换
一、题目描述: 将一个给定字符串 s 根据给定的行数 numRows ,以从上往下、从左到右进行 Z 字形排列。 比如输入字符串为 “PAYPALISHIRING” 行数为 3 时,排列如下: 之后,你的输出需要从左往右逐行读取,产…...
)
将Nginx 核心知识点扒了个底朝天(十)
ngx_http_upstream_module的作用是什么? ngx_http_upstream_module用于定义可通过fastcgi传递、proxy传递、uwsgi传递、memcached传递和scgi传递指令来引用的服务器组。 什么是C10K问题? C10K问题是指无法同时处理大量客户端(10,000)的网络套接字。 Nginx是否支持将请求压…...

GPU显卡环境配置安装
前言 最近公司购买了一张RTX3090的显卡和一台新的服务器,然后对机器的GPU环境进行了安装和配置,然后简单记录一下 环境版本 操作系统:Centos7.8 显卡型号:RTX3090 Python版本:3.7.6 Tensorflow版本:2…...

CIMCAI super unmanned intelligent gate container damage detect
世界港航人工智能领军者企业CIMCAI中集飞瞳打造全球最先进超级智能闸口无人闸口ceaspectusG™视频流动态感知集装箱箱况残损检测箱况残损识别率99%以上,箱信息识别率99.95%以上World port shipping AI leader CIMCAIThe worlds most advanced super intelligent gat…...

web概念概述
软件架构:1. C/S: Client/Server 客户端/服务器端* 在用户本地有一个客户端程序,在远程有一个服务器端程序* 如:QQ,迅雷...* 优点:1. 用户体验好* 缺点:1. 开发、安装,部署,维护 麻烦…...
编译原理笔记(1)绪论
文章目录1.什么是编译2.编译系统的结构3.词法分析概述4.语法分析概述5.语义分析概述6.中间代码生成和后端概述1.什么是编译 编译的定义:将高级语言翻译成汇编语言或机器语言的过程。前者称为源语言,后者称为目标语言。 高级语言源程序的处理过程&#…...

Java + Spring实现Hermes Agent之龙虾、Skills、Mcp和沙箱代码执行环境思路
一、记忆管理:短期 长期融合 Spring AI 自带的 InMemoryChatMemoryRepository 进程一重启就清空了,做 Agent 显然不够用。我们参考了 JavaClaw 和 Claude Code 的做法,把记忆分成两层,都落到同一个 workspace 目录下:…...

当 Agent 的输出需要符合特定格式规范
当 Agent 的输出需要符合特定格式规范:从混乱到可控的Prompt工程与结构化交互全解一、引言 (Introduction)钩子 (The Hook) 想象一个场景:你在训练一个医疗辅助诊断Agent,告诉它“把刚才的问诊结果整理成标准的HL7 FHIR Bundle”,…...

Chat2DB:基于插件化架构的AI驱动数据库管理平台技术解析
Chat2DB:基于插件化架构的AI驱动数据库管理平台技术解析 【免费下载链接】Chat2DB AI-driven database tool and SQL client, The hottest GUI client, supporting MySQL, Oracle, PostgreSQL, DB2, SQL Server, DB2, SQLite, H2, ClickHouse, and more. 项目地址…...

Postman便携版:基于Portapps架构的无痕API测试环境构建方案
Postman便携版:基于Portapps架构的无痕API测试环境构建方案 【免费下载链接】postman-portable 🚀 Postman portable for Windows 项目地址: https://gitcode.com/gh_mirrors/po/postman-portable 在API开发与测试领域,Postman已成为开…...

ScienceDecrypting:三步永久解锁加密PDF,让学术文献重获自由
ScienceDecrypting:三步永久解锁加密PDF,让学术文献重获自由 【免费下载链接】ScienceDecrypting 破解CAJViewer带有效期的文档,支持破解科学文库、标准全文数据库下载的文档。无损破解,保留文字和目录,解除有效期限制…...

Calibre-Web豆瓣插件终极配置指南:恢复元数据获取的完整解决方案
Calibre-Web豆瓣插件终极配置指南:恢复元数据获取的完整解决方案 【免费下载链接】calibre-web-douban-api 新版calibre-web已经移除douban-api了,添加一个豆瓣api实现 项目地址: https://gitcode.com/gh_mirrors/ca/calibre-web-douban-api 新版…...

AI与HPC能耗测量与碳估算:从系统到代码的工程实践指南
1. 项目概述:为什么我们需要关注AI与HPC的能耗?如果你和我一样,常年泡在数据中心或者高性能计算集群里,最近几年肯定有一个感受越来越强烈:电费账单和机柜散发的热量,正以前所未有的速度成为项目规划和运维…...

终极资源嗅探指南:猫抓浏览器扩展帮你轻松捕获网页媒体资源
终极资源嗅探指南:猫抓浏览器扩展帮你轻松捕获网页媒体资源 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 在当今数字时代,…...

HAR模型调优实战:为何精心调优的线性模型能击败复杂机器学习?
1. 项目概述:当HAR模型遇上机器学习,一场关于“调优”的较量在金融计量和量化交易领域,预测明天的市场波动率,就像试图预测一场风暴的强度,充满了挑战但也至关重要。无论是为了给衍生品定价、管理投资组合风险…...

纤维丛与连接:从微分几何到量子控制与最优控制的桥梁
1. 纤维丛与连接:从抽象几何到物理与控制的桥梁在微分几何的世界里,纤维丛是一个强大而优雅的框架,它允许我们在一个复杂的“总空间”上,为底流形上的每一点都“安装”一个额外的结构,比如一个向量空间、一个李群&…...