记录YDLidar驱动包交叉编译时出现的一点问题
由于一不小心把交叉编译的系统根目录破坏了,所以一股脑将交叉编译系统根目录全删了重新安装,安装后,交叉编译发现ydlidar的ros包驱动出现了库无法链接的错误(刚刚还是好好的),但是又想不起来之前是怎么解决的了,所以还是一步一步重新解决这个问题吧(以后碰见啥问题怎么解决还是记录一下吧,因为过一段时间真会忘!!!)
编译错误来自ydlidar_ros_driver-master这个ros包,错误如下:
[ 93%] Linking CXX executable /home/lwh/code/rk3399_ws/devel/lib/ydlidar_ros_driver/ydlidar_ros_driver_node
/usr/lib/gcc-cross/aarch64-linux-gnu/7/../../../../aarch64-linux-gnu/bin/ld: 当搜索用于 //usr/local/lib/libydlidar_sdk.a 时跳过不兼容的 -lydlidar_sdk
/usr/lib/gcc-cross/aarch64-linux-gnu/7/../../../../aarch64-linux-gnu/bin/ld: 找不到 -lydlidar_sdk
collect2: error: ld returned 1 exit status
ydlidar_ros_driver-master/CMakeFiles/ydlidar_ros_driver_node.dir/build.make:115: recipe for target '/home/lwh/code/rk3399_ws/devel/lib/ydlidar_ros_driver/ydlidar_ros_driver_node' failed
make[2]: *** [/home/lwh/code/rk3399_ws/devel/lib/ydlidar_ros_driver/ydlidar_ros_driver_node] Error 1
CMakeFiles/Makefile2:2210: recipe for target 'ydlidar_ros_driver-master/CMakeFiles/ydlidar_ros_driver_node.dir/all' failed
make[1]: *** [ydlidar_ros_driver-master/CMakeFiles/ydlidar_ros_driver_node.dir/all] Error 2
make[1]: *** 正在等待未完成的任务....
可以看到链接器ld在在对目标文件链接时无法找到匹配的库-lydlidar_sdk,
ydlidar_sdk库是通过find_package()查找的,CMakeLists.txt内容如下:
find_package(ydlidar_sdk REQUIRED)
...
add_executable(${PROJECT_NAME}_node src/ydlidar_ros_driver.cpp)#---------------------------------------------------------------------------------------
#link library directories
target_link_directories(${PROJECT_NAME}_node PRIVATE${YDLIDAR_SDK_LIBRARY_DIRS}
)
target_link_libraries(${PROJECT_NAME}_node${catkin_LIBRARIES}${YDLIDAR_SDK_LIBRARIES}-pthread)
其中,target_link_directories()作用是设置链接器链接目标target时查找库的路径,通过message()打印YDLIDAR_SDK_LIBRARY_DIRS,发现这个变量为空,那么这样的话只要将YDLIDAR_SDK_LIBRARY_DIRS设置为正确的库路径,那么应该就能解决这个问题。
接着打开find_package()所查找并执行的cmake配置文件ydlidar_sdkConfig.cmake,可以看到如下内容:
SET( YDLIDAR_SDK_LIBRARIES "ydlidar_sdk;pthread;rt" CACHE INTERNAL "YDLIDAR_SDK libraries" FORCE )
SET( YDLIDAR_SDK_INCLUDE_DIRS /usr/local/include/src;/usr/local/include CACHE INTERNAL "YDLIDAR_SDK include directories" FORCE )
SET( YDLIDAR_SDK_LIBRARY_DIRS CACHE INTERNAL "YDLIDAR_SDK library directories" FORCE )mark_as_advanced( YDLIDAR_SDK_LIBRARIES )
mark_as_advanced( YDLIDAR_SDK_LIBRARY_DIRS )
mark_as_advanced( YDLIDAR_SDK_INCLUDE_DIRS )
可以看到,缓存变量YDLIDAR_SDK_LIBRARIES设置为了"ydlidar_sdk;pthread;rt",这意味着target_link_libraries()将会根据这个变量链接
名称为ydlidar_sdk,pthread和rt的库,注意这个名称不是库文件名,而是库的标识名,是在add_library()中设置的,对于静态库,标识名为ydlidar_sdk的库实际的库文件名为libydlidar_sdk.a, 对于共享库为libydlidar_sdk.so。
而YDLIDAR_SDK_INCLUDE_DIRS的路径是原X86系统的路径,这显然是不正确的,应该要改为交叉编译的系统根目录路径。
另外,YDLIDAR_SDK_LIBRARY_DIRS,库的链接路径这里直接设置为了空,这里也要修改。
最后修改后的内容如下:
SET( YDLIDAR_SDK_LIBRARIES "ydlidar_sdk;pthread;rt" CACHE INTERNAL "YDLIDAR_SDK libraries" FORCE )
SET( YDLIDAR_SDK_INCLUDE_DIRS /交叉编译系统根目录/usr/local/include/src;/交叉编译系统根目录/usr/local/include CACHE INTERNAL "YDLIDAR_SDK include directories" FORCE )
SET( YDLIDAR_SDK_LIBRARY_DIRS /交叉编译系统根目录/usr/local/lib CACHE INTERNAL "YDLIDAR_SDK library directories" FORCE )mark_as_advanced( YDLIDAR_SDK_LIBRARIES )
mark_as_advanced( YDLIDAR_SDK_LIBRARY_DIRS )
mark_as_advanced( YDLIDAR_SDK_INCLUDE_DIRS )
修改后保存,再执行交叉编译,编译通过。
相关文章:

记录YDLidar驱动包交叉编译时出现的一点问题
由于一不小心把交叉编译的系统根目录破坏了,所以一股脑将交叉编译系统根目录全删了重新安装,安装后,交叉编译发现ydlidar的ros包驱动出现了库无法链接的错误(刚刚还是好好的),但是又想不起来之前是怎么解决的了,所以还…...
嵌入式学习笔记(32)S5PV210的向量中断控制器
6.6.1异常处理的2个阶段 可以将异常处理分为2个阶段来理解。第一个阶段是异常向量表跳转;第二个阶段是进入了真正的异常处理程序irq_handler之后的部分。 6.6.2回顾:中断处理的第一个阶段(异常向量表跳转阶段)处理 (…...

linux下安装qt、qt触摸屏校准tslib
linux下安装qt 在 Linux 系统下安装 Qt,可以通过以下步骤进行操作:1. 下载 Qt 安装包:首先,你需要从 Qt 官方网站(https://www.qt.io/)下载适用于 Linux 的 Qt 安装包。选择与你的系统和需求相匹配的版本&…...
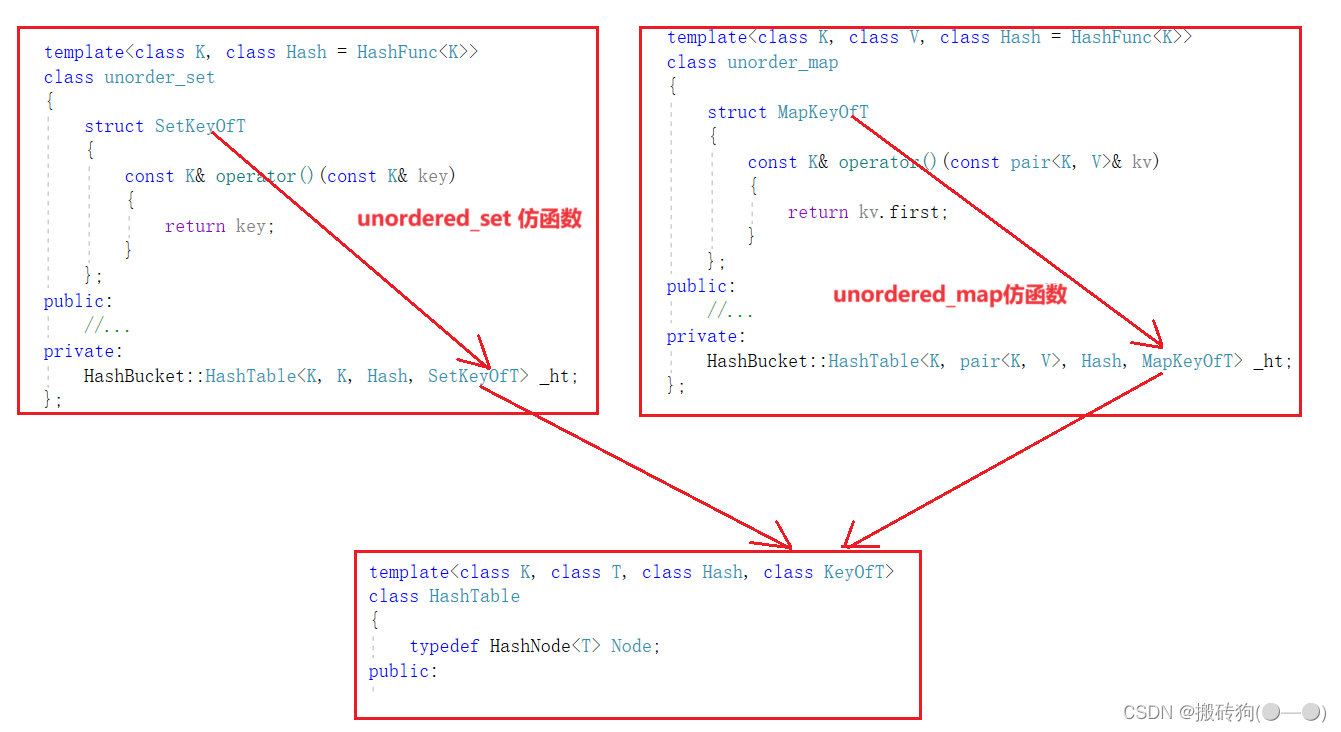
C++之unordered_map,unordered_set模拟实现
unordered_map,unordered_set模拟实现 哈希表源代码哈希表模板参数的控制仿函数增加正向迭代器实现*运算符重载->运算符重载运算符重载! 和 运算符重载begin()与end()实现 unordered_set实现unordered_map实现map/set 与 unordered_map/unordered_set对比哈希表…...

React Router,常用API有哪些?
react-router React Router是一个用于构建单页面应用程序(SPA)的库,它是用于管理React应用中页面导航和路由的工具。SPA是一种Web应用程序类型,它在加载初始页面后,通过JavaScript来动态加载并更新页面内容࿰…...

JVM类加载和双亲委派机制
当我们用java命令运行某个类的main函数启动程序时,首先需要通过类加载器把类加载到JVM,本文主要说明类加载机制和其具体实现双亲委派模式。 一、类加载机制 类加载过程: 类加载的过程是将类的字节码加载到内存中的过程,主要包括…...

P-MVSNet ICCV-2019 学习笔记总结 译文 深度学习三维重建
文章目录 5 P-MVSNet ICCV-20195.0 主要特点5.1 文章概述5.2 研究方法5.2.1 特征提取5.2.2 学习局域匹配置信5.2.3 深度图预测5.2.4 Loss方程MVSNet系列最新顶刊 对比总结5 P-MVSNet ICCV-2019 深度学习三维重建 P-MVSNet-ICCV-2019(原文、译文、批注) 下载 5.0 主要特点 …...

vueshowpdf 移动端pdf文件预览
1、安装 npm install vueshowpdf -S2、参数 属性说明类型默认值v-model是否显示pdf--pdfurlpdf的文件地址String- scale 默认放大倍数 Number1.2 minscale 最小放大倍数 Number0.8 maxscale 最大放大倍数 Number2 3、事件 名称说明回调参数closepdf pdf关闭事件-pdferr文…...

C#根据excel文件中的表头创建数据库表
C#根据excel文件中的表头创建数据库表 private void button1_Click(object sender, EventArgs e){string tableName tableNameTextBox.Text;string connectionString "";using (OpenFileDialog openFileDialog new OpenFileDialog()){openFileDialog.Filter &quo…...
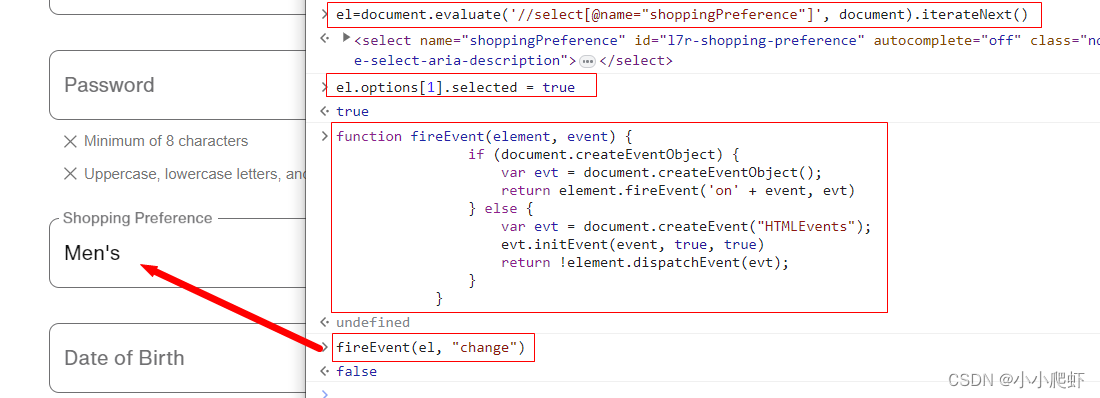
js通过xpath定位元素并且操作元素以下拉框select为例
js也可以使用xpath定位元素,现在实例讲解。 页面上有一个下拉框,里面内容有三个,用F12看一下 一、使用xpath定位这个下拉框select eldocument.evaluate(//select[name"shoppingPreference"], document).iterateNext()二、为下拉框…...

数据类型
目录 1.数值类型 整数类型 int 小数类型 double 2.字符类型 固定长度字符串 char 可变长度字符串 varchar 3.日期时间类型 日期类型:date 日期时间类型:datetime MySQL从小白到总裁完整教程目录:https://blog.csdn.net/weixin_67859959/article…...

vue 模板应用
一,模板应用也就是对DOM的操作 二,如何使用 通过标签里面添加ref 和vue中使用 this.$refs.ref的名字.操作 进行使用 <template><h3>模板引用</h3><div ref"cont" class"cont">{{ content }}</div>&…...
Golang教程与Gin教程合集,入门到实战
GolangGin框架GormRbac微服务仿小米商城项目实战视频教程Docker Swarm K8s云原生分布式部署 介绍: Go即Golang,是Google公司2009年11月正式对外公开的一门编程语言,它不仅拥有静态编译语言的安全和高性能,而 且又达到了动态语言开…...

国家网络安全周 | 天空卫士荣获“2023网络安全优秀创新成果大赛优胜奖”
9月11日上午,四川省2023年国家网络安全宣传周在泸州开幕。在开幕式上,为2023年网络安全优秀创新成果大赛——成都分站赛暨四川省“熊猫杯”网络安全优秀作品大赛中获奖企业颁奖,天空卫士银行数据安全方案获得优秀解决方案奖。 本次比赛由四川…...
)
Swift学习笔记一(Array篇)
目录 0 绪论 1 数组的创建和初始化 2.数组遍历 2.1通过键值对遍历 2.2 通过forEach遍历 2.3 通过for in遍历 2.3.1 for in 搭配 enumerated 2.3.2 for in的另一种形式 2.3.2 for in 搭配 indices 2.4 通过Iterator遍历器遍历 3 数组的操作 3.1 contains 判断数组包含…...

C++项目实战——基于多设计模式下的同步异步日志系统-②-前置知识补充-不定参函数
文章目录 专栏导读不定参函数C风格不定参函数不定参宏函数 专栏导读 🌸作者简介:花想云 ,在读本科生一枚,C/C领域新星创作者,新星计划导师,阿里云专家博主,CSDN内容合伙人…致力于 C/C、Linux 学…...

C++使用Boost库加入UDP组播时程序崩溃
程序崩溃情况 本程序运行在Oracle VM VirtualBox虚拟的Ubuntu20.04上 terminate called after throwing an instance of ‘boost::wrapexceptboost::system::system_error’ what(): set_option: No such device 已放弃 (核心已转储) ** C使用Boost库加入组播的代码 #inclu…...

华为HCIA(四)
链路聚合可以负载分担,增加带宽,提高可靠性 Eth-trunk的传输速率和成员端口数量喝带宽有关 路由器分割广播域,交换机分割冲突域 指定端口:DP;根端口:RP;阻塞端口:AP 如果目的MAC不在交换机MAC中&…...
Qt --- Day01
效果图: 头像的圆形未实现 单击登陆,触发信号与槽 enter_widget.h #ifndef ENTER_H #define ENTER_H#include <QDialog> #include<QLabel> #include<QTimer> class enter_widget : public QDialog {Q_OBJECT public:explicit enter_…...
24.98万起,新一代AITO问界M7值得买吗?
监制 | 何玺 排版 | 叶媛 问界汽车新品来袭。 9月12日下午,问界汽车为全新的M7系列车型举行了发布会。华为常务董事余承东,在全网一片“遥遥领先”呼声的烘托下,上台发表演讲,详细介绍了M7的全面升级和各大亮点。 01 新一代AI…...

GKD订阅管理实战手册:一站式解决Android自动化规则配置难题
GKD订阅管理实战手册:一站式解决Android自动化规则配置难题 【免费下载链接】GKD_THS_List GKD第三方订阅收录名单 项目地址: https://gitcode.com/gh_mirrors/gk/GKD_THS_List GKD订阅管理是Android自动化工具GKD的第三方订阅收录平台,为GKD用户…...
)
手把手教你用wget和md5sum搞定nuScenes数据集下载与校验(Linux/Windows教程)
跨平台高效获取nuScenes数据集:从命令行下载到完整性验证全指南 在自动驾驶和计算机视觉领域,nuScenes数据集因其丰富的传感器数据和精细的标注而成为研究热点。但面对数百GB的数据量,传统下载方式往往力不从心——浏览器下载容易中断&#…...

构建AI信任层TrustLayer:开源插件化架构保障AI输出安全与可靠
1. 项目概述:为什么我们需要一个AI信任层?最近几个月,我几乎把所有主流的AI工具都试了个遍。从代码助手到文案生成,从图像创作到数据分析,每个工具都承诺能提升效率。但用着用着,我发现一个越来越明显的问题…...

告别转矩脉动:用Matlab/Simulink手把手搭建三电平SVPWM异步电机DTC仿真模型
三电平SVPWM异步电机DTC仿真:从零搭建到性能优化的Matlab实战指南 在电机控制领域,直接转矩控制(DTC)因其结构简单、动态响应快等优势,已成为交流调速系统的重要技术路线。然而传统两电平DTC系统存在的转矩脉动大、电流谐波高等问题ÿ…...

从 SU22 到 SU24,权限检查指示符和默认值的装载与落地治理
在 SAP 权限项目里,最容易被低估的一类数据,不是用户主记录,也不是 PFCG 角色本身,而是藏在 SU22 和 SU24 背后的权限检查指示符与授权默认值。很多团队在 DEV 系统里把角色调到绿灯,以为传到 QAS 和 PRD 以后就万事大吉,结果一到回归测试,业务顾问打开 VA01、ME21N、FD…...

化工仿真神器 Aspen 15.0:AI 赋能 + 绿氢专项,附下载安装教程
Aspen 15.0 是 工业流程模拟与数字化平台,核心为化工、石化、炼油、能源等行业提供全生命周期解决方案,从工艺设计、模拟优化到生产运维、绿色转型全覆盖,15.0 版本重点强化工业 AI、生成式 AI 能力,适配绿色能源与可持续发展需求…...

从28纳米HKMG工艺到GPU逆向工程:深度解析AMD Radeon HD 7970的芯片设计与技术遗产
1. 项目概述:一次对经典显卡的深度技术考古对于很多老玩家和硬件爱好者来说,AMD Radeon HD 7970是一个绕不开的名字。它不仅是AMD(或者说,收购了ATI之后的AMD)在2012年投下的一颗重磅炸弹,更是在显卡发展史…...
)
告别X11!在Ubuntu 22.04上从源码编译Wayland+Weston桌面(保姆级避坑指南)
从X11到Wayland:Ubuntu 22.04源码编译Weston全流程实战 如果你已经受够了X11的老旧架构和偶尔的卡顿,现在是时候拥抱Wayland了。作为Linux桌面图形栈的下一代接班人,Wayland不仅在设计上更现代化,还能带来更流畅的图形体验。本文将…...

Zotero Duplicates Merger终极指南:3步告别文献重复困扰
Zotero Duplicates Merger终极指南:3步告别文献重复困扰 【免费下载链接】ZoteroDuplicatesMerger A zotero plugin to automatically merge duplicate items 项目地址: https://gitcode.com/gh_mirrors/zo/ZoteroDuplicatesMerger 还在为Zotero文献库中堆积…...

基于大语言模型的自动化股票研报生成系统设计与实现
1. 项目概述:当ChatGPT遇上股票研报最近几年,AI在金融领域的应用已经从简单的数据查询,进化到了能够进行复杂分析和生成专业报告的程度。我关注到一个挺有意思的项目,叫ddobokki/chatgpt_stock_report。光看这个名字,你…...