驱动开发,IO多路复用实现过程,epoll方式
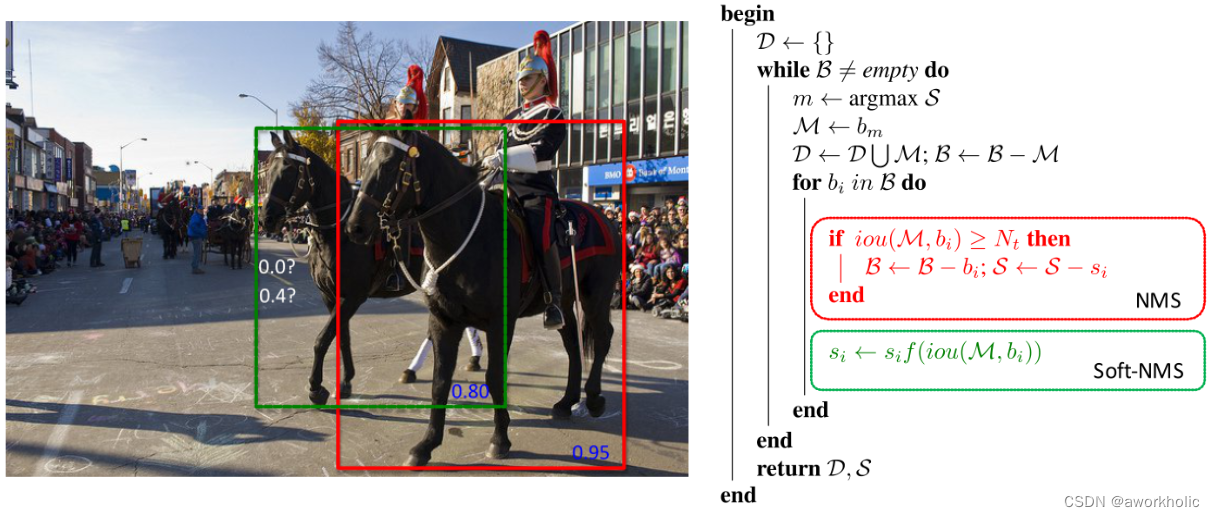
1.框架图
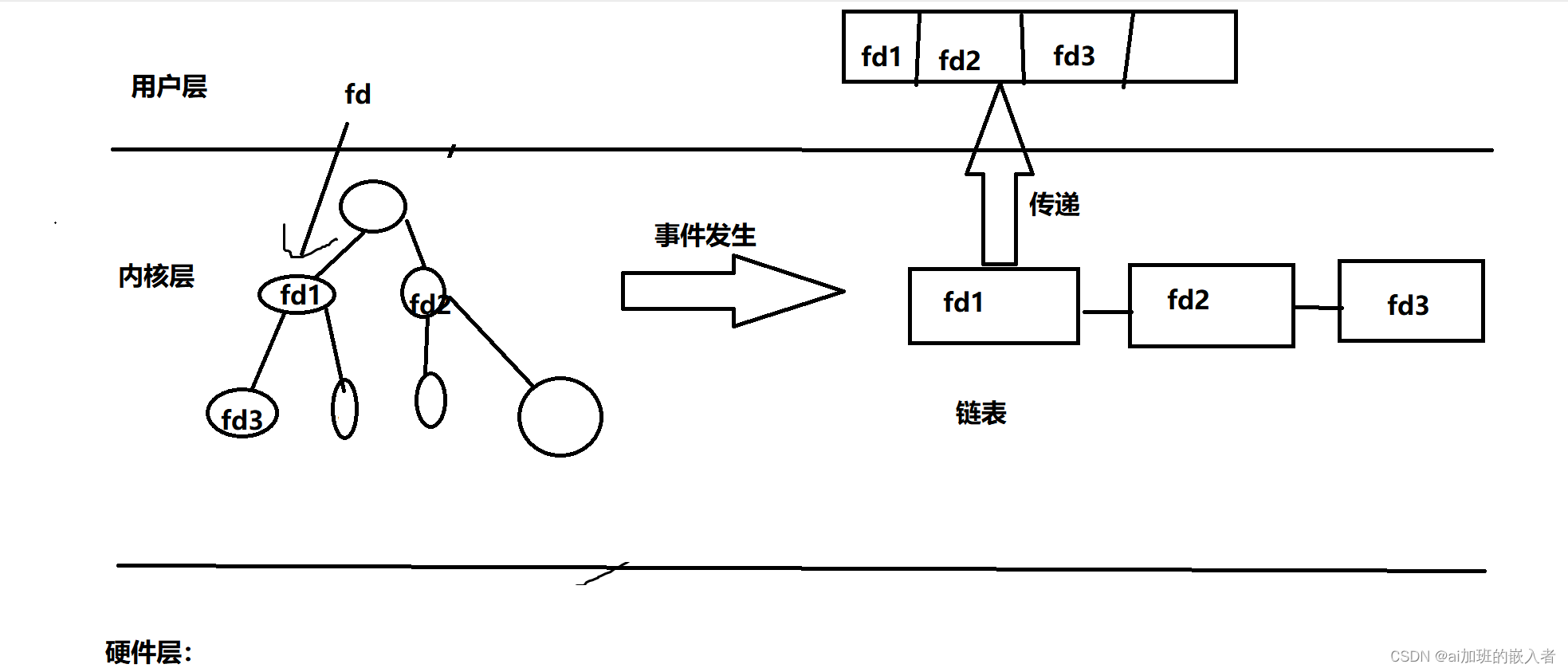
被称为当前时代最好用的io多路复用方式;
核心操作:一棵树(红黑树)、一张表(内核链表)以及三个接口;
思想:(fd代表文件描述符)
epoll要把检测的事件fd挂载到内核空间红黑树上,遍历红黑树,调用每个fd对应的操作方法,找到发生事件的fd,如果没有发生事件的fd,进程休眠,如果事件发生,将发生事件的fd拷贝一份放到内核链表,每个节点对应一个fd,最后把链表的节点信息传递到用户空间的数组中,用户空间无需判断事件的发生,需要判断事件类型(读写等);
2.代码
---pro1.c---应用程序(epoll方式)
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/ioctl.h>
#include <sys/select.h>
#include <sys/time.h>
#include <sys/epoll.h>int main(int argc, const char *argv[])
{int fd1,fd2,epfd;char buf[128] = {0};struct epoll_event event; //用于操作epollstruct epoll_event events[10]; //用户空间存放发生事件的数组//创建epoll句柄,红黑树根节点epfd = epoll_create(1);if(epfd < 0){printf("epoll_create fail\n");exit(-1);}//打开设备文件fd1 = open("/dev/input/mouse0", O_RDWR);if (fd1 < 0){printf("鼠标事件文件失败\n");exit(-1);}fd2 = open("/dev/myled0", O_RDWR);if (fd2 < 0){printf("自定义事件文件失败\n");exit(-1);}//添加准备就绪事件到epollevent.events = EPOLLIN; //读事件event.data.fd = fd1;if((epoll_ctl(epfd,EPOLL_CTL_ADD,fd1,&event)) < 0){printf("epoll_ctl fd1 fail\n");}event.events = EPOLLIN; //读事件event.data.fd = fd2;if((epoll_ctl(epfd,EPOLL_CTL_ADD,fd2,&event)) < 0){printf("epoll_ctl fd2 fail\n");}//监听时间是否发生while(1){//成功接收返回时间的个数,放入events数组中int ret = epoll_wait(epfd,events,10,-1);if(ret < 0){printf("epoll_wait fail\n");exit(-1); }int i;//循环遍历数组,做事件的处理for(i=0; i<ret; i++){if(events[i].events & EPOLLIN) //发生事件是读事件{read(events[i].data.fd,buf,sizeof(buf));printf("buf:%s\n",buf);memset(buf,0,sizeof(buf));}}}close(fd1);close(fd2);return 0;
}
---pro2.c---应用程序(模拟自定义设备数据就绪)
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <stdlib.h>int main(int argc, const char *argv[])
{char buf[128] = "hello world";int fd = open("/dev/myled0", O_RDWR);if (fd < 0){printf("打开设备文件失败\n");exit(-1);}write(fd, buf, sizeof(buf));close(fd);return 0;
}---epoll.c---驱动程序
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include <linux/uaccess.h>
#include <linux/wait.h>
#include<linux/poll.h>char kbuf[128] = {0};
unsigned int major;
struct class *cls;
struct device *dev;
unsigned int condition = 0;// 定义一个等待队列头
wait_queue_head_t wq_head;// 封装操作方法
int mycdev_open(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{int ret;ret = copy_to_user(ubuf, kbuf, size);if (ret){printk("copy_to_ user err\n");return -EIO;}condition = 0; // 下一次硬件数据没有就绪return 0;
}
ssize_t mycdev_write(struct file *file, const char *ubuf, size_t size, loff_t *lof)
{int ret;// 从用户拷贝数据,模拟硬件数据ret = copy_from_user(kbuf, ubuf, size);if (ret){printk("copy_from_user err\n");return -EIO;}condition = 1;wake_up_interruptible(&wq_head);return 0;
}
//封装POLL方法
__poll_t mycdev_poll(struct file *file, struct poll_table_struct *wait)
{__poll_t mask = 0;//向上提交等待队列头poll_wait(file,&wq_head,wait);//根据事件是否发生给一个合适的返回值if(condition){mask = POLLIN;}return mask;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}struct file_operations fops = {.open = mycdev_open,.read = mycdev_read,.poll = mycdev_poll,.write = mycdev_write,.release = mycdev_close,
};// 入口函数
static int __init mycdev_init(void)
{//初始化等待队列init_waitqueue_head(&wq_head);major = register_chrdev(0, "myled", &fops);if (major < 0){printk("字符设备驱动注册失败\n");return major;}printk("字符设备驱动注册成功:major=%d\n", major);// 向上提交目录cls = class_create(THIS_MODULE, "MYLED");if (IS_ERR(cls)){printk("向上提交目录失败\n");return -PTR_ERR(cls);}printk("向上提交目录成功\n");// 向上提交设备节点信息int i;for (i = 0; i < 3; i++){dev = device_create(cls, NULL, MKDEV(major, i), NULL, "myled%d", i);if (IS_ERR(dev)){printk("向上提交设备节点信息失败\n");return -PTR_ERR(dev);}}printk("向上提交设备节点信息成功\n");return 0;
}// 出口函数
static void __exit mycdev_exit(void)
{// 销毁设备节点信息int i;for (i = 0; i < 3; i++){device_destroy(cls, MKDEV(major, i));}// 销毁目录信息class_destroy(cls);// 字符设备驱动注销unregister_chrdev(major, "myled");
}// 声明
// 入口函数地址
module_init(mycdev_init);
// 出口函数地址
module_exit(mycdev_exit);
// 遵循的GPL协议
MODULE_LICENSE("GPL");
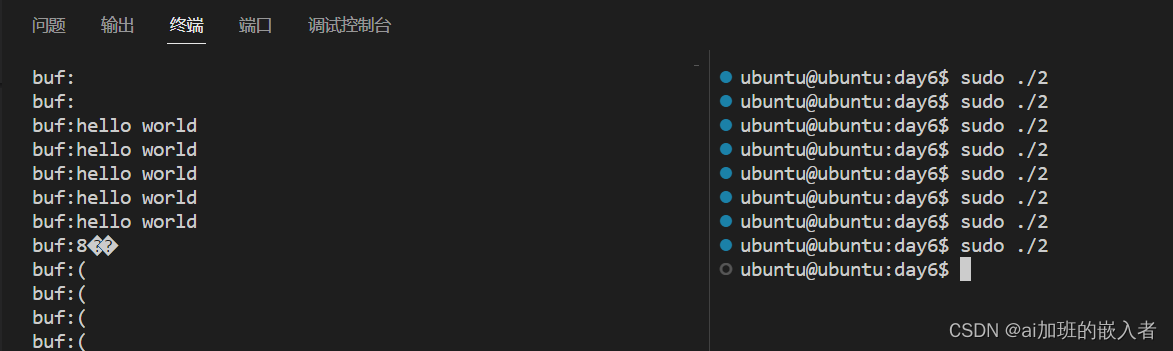
3.测试结果
执行pro2.c,自定义事件被监听到;
在ubuntu上动鼠标,鼠标事件被监听;
相关文章:
驱动开发,IO多路复用实现过程,epoll方式
1.框架图 被称为当前时代最好用的io多路复用方式; 核心操作:一棵树(红黑树)、一张表(内核链表)以及三个接口; 思想:(fd代表文件描述符) epoll要把检测的事件…...
java在mysql中查询内容无法塞入实体类中,报错 all elements are null
目录 一、问题描述二、解决方案 一、问题描述 java项目中整体配置了mysql的驼峰式字段匹配规则。 mybatis.configuration.map-underscore-to-camel-casetrue由于项目需求,需要返回字段为file_id,file_url,并且放入实体类中,实体…...
Linux 挂载
挂载需要挂载源和挂载点 虚拟机本身就有的挂源 添加硬件 重启虚拟机 操作程序 sudo fdisk -l //以管理员权限查看电脑硬盘使用情况sudo mkfs.ext4 /dev/sdb //以管理员身份格式化硬盘sudo mkdir guazai //创建挂载文件夹 sudo mount /dev/sdb/guazai //将挂载源接上挂载点 s…...

[面试] 15道最典型的k8s面试题
文章目录 在 Kubernetes 中,有以下常见的资源对象:1.什么是 Kubernetes?它的主要特点是什么?2. Kubernetes 中的 Pod 是什么?它的作用是什么?3.Kubernetes 中的 Deployment 和 StatefulSet 有何区别&#x…...

lintcode 552 · 创建最大数 【算法 数组 贪心 hard】
题目 https://www.lintcode.com/problem/552/description 描述 给出两个长度分别是m和n的数组来表示两个大整数,数组的每个元素都是数字0-9。从这两个数组当中选出k个数字来创建一个最大数,其中k满足k < m n。选出来的数字在创建的最大数里面的位置…...
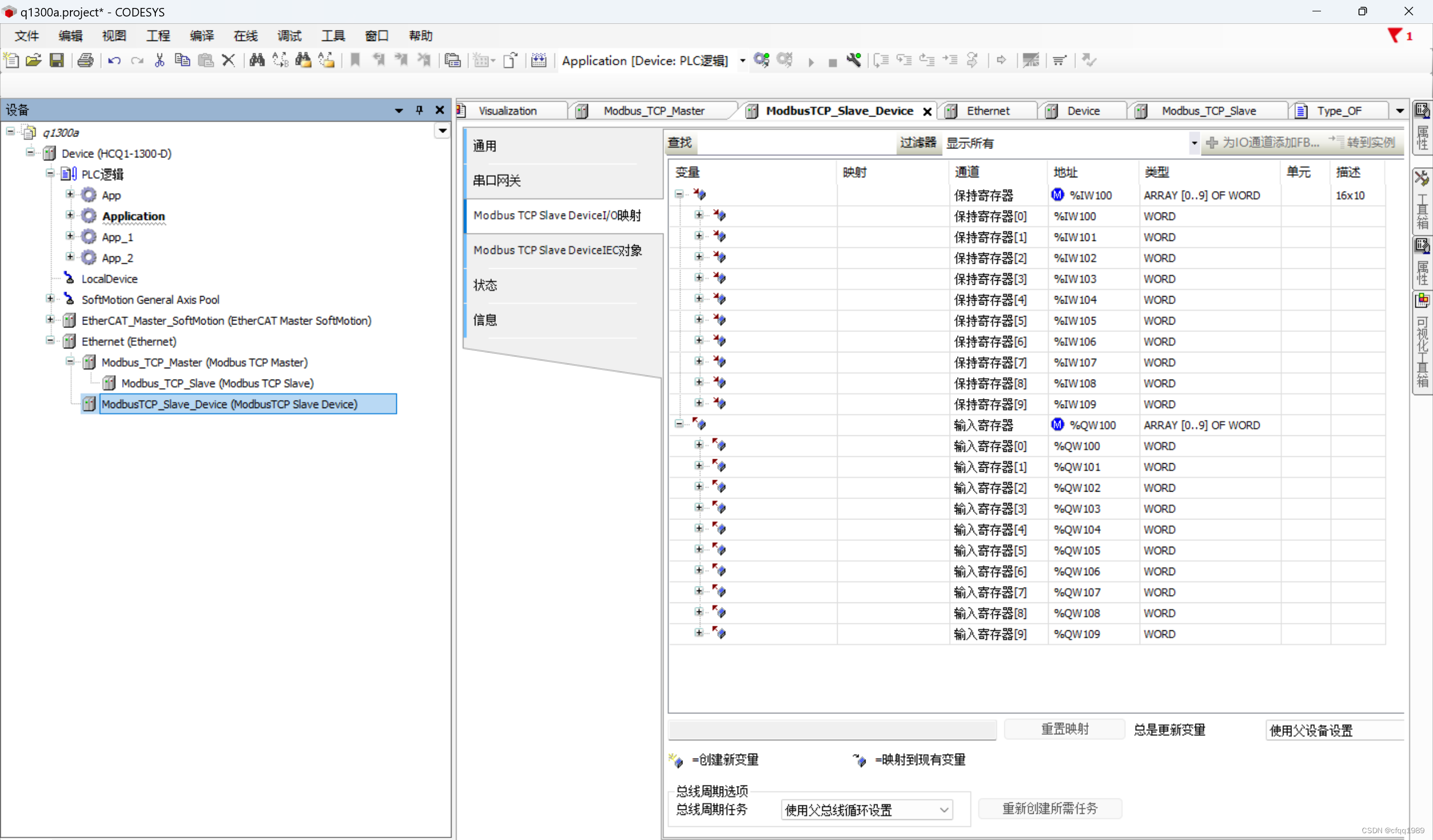
ModbusTCP服务端
1在Device下,添加设备net: 公交车。 2在net下添加 ModbusTCP...

Middleware ❀ Hadoop功能与使用详解(HDFS+YARN)
文章目录 1、服务概述1.1 HDFS1.1.1 架构解析1.1.1.1 Block 数据块1.1.1.2 NameNode 名称节点1.1.1.3 Secondary NameNode 第二名称节点1.1.1.4 DataNode 数据节点1.1.1.5 Block Caching 块缓存1.1.1.6 HDFS Federation 联邦1.1.1.7 Rack Awareness 机架感知 1.1.2 读写操作与可…...
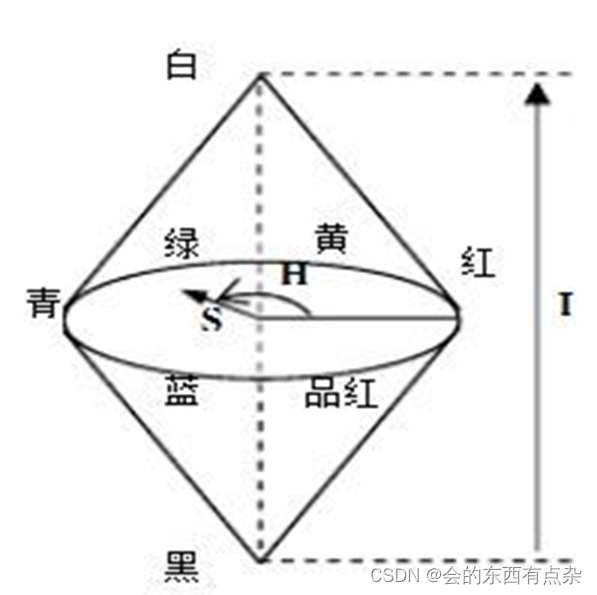
Matlab图像处理-从RGB转换为HSV
从RGB转换为HSV HSV彩色系统基于圆柱坐标系。从RGB转换为HSV需要开发将(笛卡儿坐标系中的)RGB值映射到圆柱坐标系的公式。多数计算机图形学教材中已详细推导了这一公式,故此处从略。 从RGB转换为HSV的MATLAB函数是rgb2hsv,其语法为: hsv_imag…...

iOS Error Domain=PHPhotosErrorDomain Code=3300
AVCapturePhoto的数据保存到 PHPhotoLibrary的时候报错Error DomainPHPhotosErrorDomain Code3300解决代码(也可以使用addResourceWithType:data:options:来添加数据到request,JEPG的实测可以,raw的不确定): [PHPhoto…...
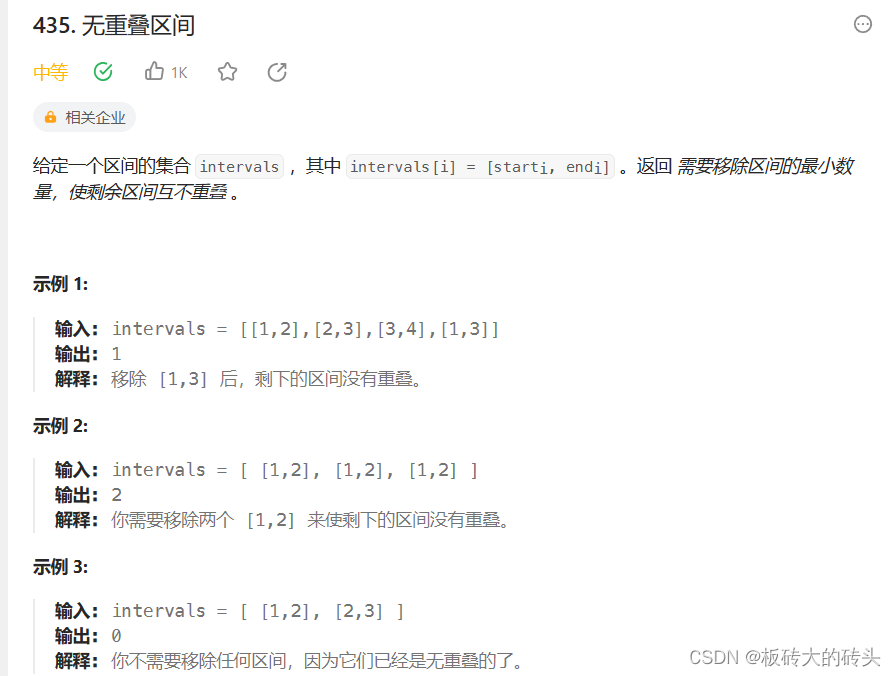
LeetCode(力扣)435. 无重叠区间Python
LeetCode435. 无重叠区间 题目链接代码 题目链接 https://leetcode.cn/problems/non-overlapping-intervals/ 代码 class Solution:def eraseOverlapIntervals(self, intervals: List[List[int]]) -> int:if not intervals:return 0intervals.sort(keylambda x: x[0])co…...

opencv c++实现鼠标框选区域并显示选择的图片区域
OpenCV可以使用setMouseCallback设置鼠标事件的回调函数,从而然后根据需要进行处理。 setMouseCallback原型为: void cv::setMouseCallback(const cv::String& windowName, MouseCallback onMouse, void* userData = 0); 其中,参数说明如下:windowName:窗口名称 onMo…...

Python实现自主售卖机
1 问题 在python中我们常常使用到条件判断,if语句时常见的条件判断语句之一。那么如何使用if语句实现根据情况自动选择商品进行售卖呢? 2 方法 根据if语句执行时从上往下执行的特点,使用if语句、dict和list来实现整个流程。 代码清单 1 drink…...

任务复杂度与人机
任务复杂度计算是指根据任务的难易程度和需要的资源投入来评估任务的复杂程度。一般来说,任务复杂度计算会考虑以下几个因素: 难度程度:任务的难度程度是指完成任务所需要的知识、技能和经验等的要求。较高的难度程度会增加任务的复杂度。任务…...

Windows关闭zookeeper、rocketmq日志输出以及修改rocketmq的JVM内存占用大小
JDK-1.8zookeeper-3.4.14rocketmq-3.2.6 zookeeper 进入到zookeeper的conf目录 清空配置文件,只保留下面这一行。zookeeper关闭日志输出相对简单。 log4j.rootLoggerOFFrocketmq 进入到rocketmq的conf目录 logback_broker.xml <?xml version"1.0&q…...
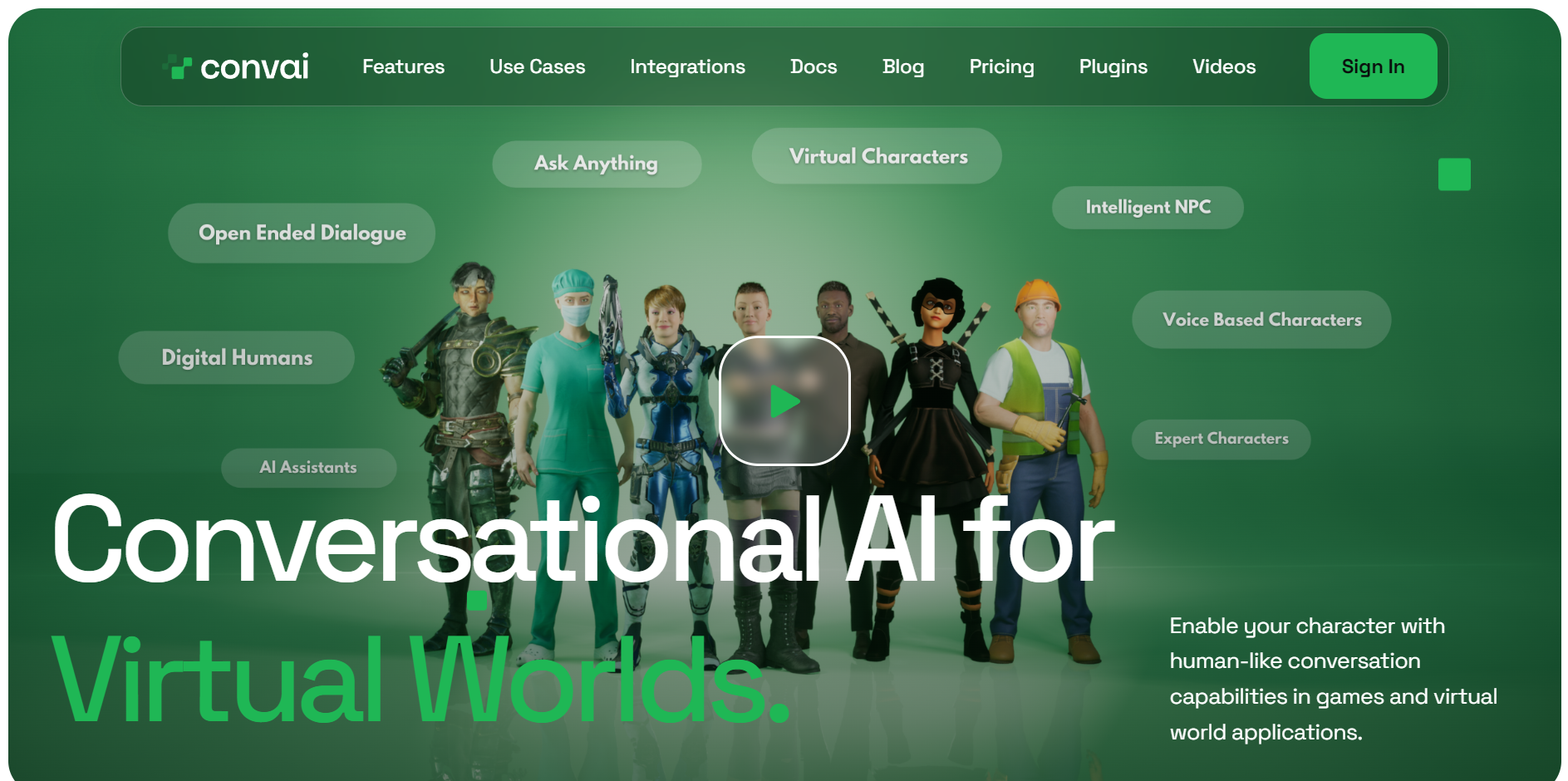
Convai:让虚拟游戏角色更智能的对话AI人工智能平台
【产品介绍】 名称 Convai 具体描述 Convai是一款专为虚拟世界而设计的对话人工智能平台,它可以让你为你的游戏或应用中的角色 赋予人类般的对话能力。Convai利用了最先进的生成式对话人工智能技术,让你的角色可以…...

【送书活动】大模型赛道如何实现华丽的弯道超车
文章目录 导读前言AI/ML 模型训练任务对数据平台的需求01 具备对海量小文件的频繁数据访问的 I/O 效率02 提高 GPU 利用率,降低成本并提高投资回报率03 支持各种存储系统的原生接口04 支持单云、混合云和多云部署 核心密码01 通过数据抽象化统一数据孤岛02 通过分布…...
opencv dnn模块 示例(16) 目标检测 object_detection 之 yolov4
博客【opencv dnn模块 示例(3) 目标检测 object_detection (2) YOLO object detection】 测试了yolov3 及之前系列的模型,有在博客【opencv dnn模块 示例(15) opencv4.2版本dnn支持cuda加速(vs2015异常解决)】 说明了如何使用dnn模块进行cuda…...
Python提取JSON数据中的键值对并保存为.csv文件
本文介绍基于Python,读取JSON文件数据,并将JSON文件中指定的键值对数据转换为.csv格式文件的方法。 在之前的文章Python提取JSON文件中的指定数据并保存在CSV或Excel表格文件内(https://blog.csdn.net/zhebushibiaoshifu/article/details/132…...

使用IDEA开发Servlet
一、新建工程 二、填写新工程的基本信息 javaee8的项目可以运行在tomcat9 三、配置tomcat 1、编辑server信息 “On frame deactivation”的意思是idea窗口发生切换时。 2、编辑部署信息 war exploded方式,这种方式是以文件夹方式部署的,支持热加载。 …...
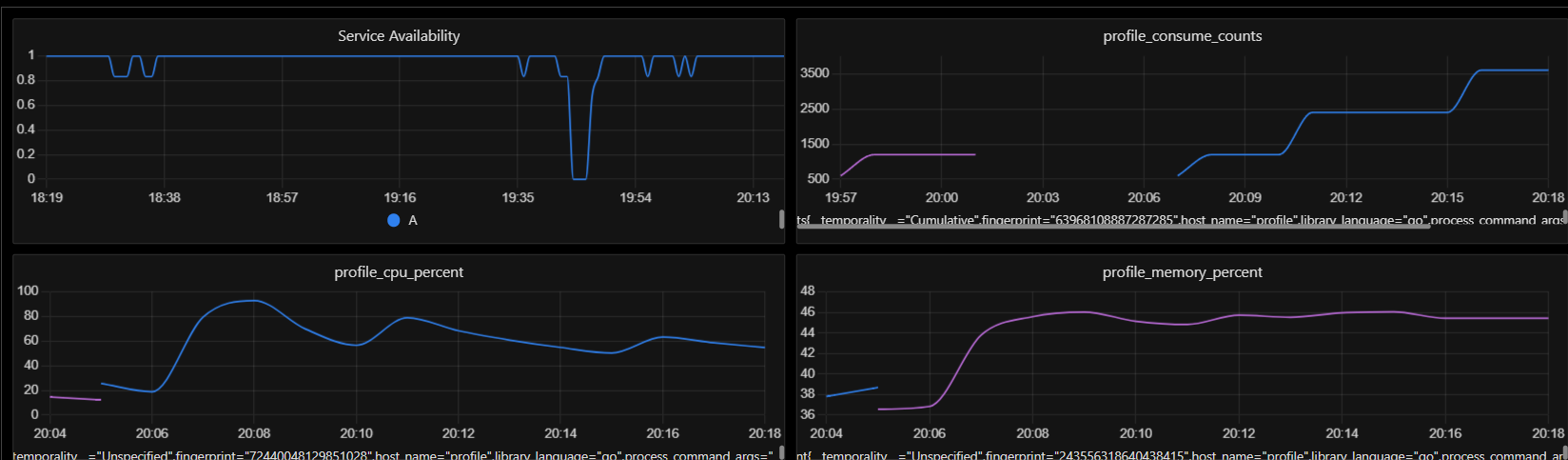
腾讯mini项目-【指标监控服务重构】2023-07-21
今日已办 当在Docker容器中运行程序时,可能会遇到使用os.Getpid()函数时出现异常的情况。这是因为Docker容器中的进程隔离机制与宿主机器不同,容器内部的进程可能无法访问宿主机器的进程信息。 要解决这个问题,可以尝试: 使用do…...

免费Windows桌面分区工具NoFences:3分钟打造高效工作空间
免费Windows桌面分区工具NoFences:3分钟打造高效工作空间 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 还在为杂乱无章的Windows桌面而烦恼吗?NoFen…...

2026 年行业真相:履职规范背后的管理秘密
现场冲突:安全与进度的激烈碰撞在工程建设领域,安全与进度的冲突一直是个老大难问题。就拿上海中心的建设来说,如此庞大复杂的项目,施工过程中安全管理难度极大。在某些施工阶段,为了赶进度,部分施工人员可…...

如何在5分钟内快速上手LeRobot机器人AI控制框架:从零到一的完整指南
如何在5分钟内快速上手LeRobot机器人AI控制框架:从零到一的完整指南 【免费下载链接】lerobot 🤗 LeRobot: Making AI for Robotics more accessible with end-to-end learning 项目地址: https://gitcode.com/GitHub_Trending/le/lerobot 还在为…...

STM32从Keil移植到GCC编译环境,搞定startup_stm32f10x_hd.S报错的完整流程
STM32从Keil到GCC编译环境迁移实战指南 当你决定将STM32项目从熟悉的Keil MDK环境迁移到GCC工具链时,可能会遇到一系列令人头疼的兼容性问题。作为一名经历过多次环境迁移的嵌入式开发者,我深知这个过程可能遇到的陷阱。本文将带你系统性地解决从启动文件…...

AI智能体安全防护:ClawGuard主动防御系统架构与实战部署
1. 项目概述:为AI智能体构建一道主动防御的“防火墙”在AI智能体(AI Agent)技术快速普及的今天,我们正面临一个全新的安全挑战。想象一下,你精心调教的AI助手,能够自主浏览网页、调用API、执行命令…...

如何用ImageSearch在千万级图库中秒速找到任何图片:新手终极指南
如何用ImageSearch在千万级图库中秒速找到任何图片:新手终极指南 【免费下载链接】ImageSearch 基于.NET10的本地硬盘千万级图库以图搜图案例Demo和图片exif信息移除小工具分享 项目地址: https://gitcode.com/gh_mirrors/im/ImageSearch 你是否曾因为找不到…...

用Wireshark抓包分析Powerlink协议:从数据帧看懂主站轮询与从站响应
Wireshark实战:深度解析Powerlink协议的主从站通信机制 工业以太网协议Powerlink凭借其确定性实时通信能力,在自动化控制领域占据重要地位。本文将带您通过Wireshark抓包分析,揭开Powerlink主站轮询与从站响应的核心机制。不同于基础配置教程…...

ScienceClaw:基于Python的学术爬虫工具,高效抓取文献与课程资料
1. 项目概述与核心价值 最近在GitHub上看到一个挺有意思的项目,叫“ScienceClaw”,作者是beita6969。光看这个名字,你可能觉得有点摸不着头脑——“科学爪”?这到底是干嘛的?作为一个在开源社区混迹多年的老鸟…...

Gentoo Linux 中通过 Overlay 优雅安装 Cursor 二进制编辑器
1. 项目概述与背景如果你是一名 Gentoo Linux 的用户,同时又对 Cursor 这款新兴的 AI 代码编辑器感兴趣,那么你很可能已经遇到了一个经典的 Gentoo 式难题:如何在这样一个以源码编译为核心的发行版上,方便地安装一个官方只提供.de…...

小熊猫Dev-C++:零配置C/C++开发环境的终极指南
小熊猫Dev-C:零配置C/C开发环境的终极指南 【免费下载链接】Dev-CPP A greatly improved Dev-Cpp 项目地址: https://gitcode.com/gh_mirrors/dev/Dev-CPP 小熊猫Dev-C(Red Panda Dev-C)是一款专为C/C开发者设计的现代化集成开发环境&…...