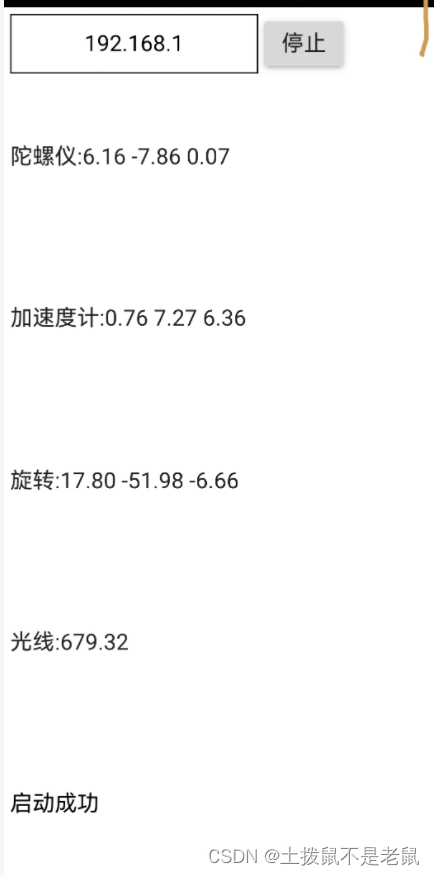
QML android 采集手机传感器数据 并通过udp 发送
利用 qt 开发 安卓 app ,采集手机传感器数据 并通过udp 发送
#ifndef UDPLINK_H
#define UDPLINK_H#include <QObject>
#include <QUdpSocket>
#include <QHostAddress>class UdpLink : public QObject
{Q_OBJECT
public:explicit UdpLink(QObject *parent = nullptr);void setAddress(QString _ip,quint16 _port);void sendData(QByteArray ba);signals:
private:QString ip;quint16 port;QUdpSocket socket;
};#endif // UDPLINK_H
#include "udplink.h"UdpLink::UdpLink(QObject *parent): QObject{parent}
{}void UdpLink::setAddress(QString _ip, quint16 _port)
{ip=_ip;port = _port;
}void UdpLink::sendData(QByteArray ba)
{socket.writeDatagram(ba, QHostAddress(ip), port);
}
#ifndef APP_H
#define APP_H#include <QObject>
#include <udplink.h>
#include <atomic>#include <QAccelerometer>
#include <QGyroscope>
#include <QRotationSensor>
#include <QLightSensor>class App : public QObject
{Q_OBJECTQ_PROPERTY(bool isRuning READ getIsRuning WRITE setIsRuning NOTIFY isRuningChanged)
public:explicit App(QObject *parent = nullptr);Q_INVOKABLE void start(QString ip);Q_INVOKABLE void stop();bool getIsRuning() const;void setIsRuning(bool newIsRuning);signals:void gyroValue(qreal x,qreal y,qreal z);void accelerValue(qreal x,qreal y,qreal z);void rotationValue(qreal x,qreal y,qreal z);void lightValue(qreal lux);void logInfo(QString str);void isRuningChanged();private:UdpLink udplink;bool isRuning{false};//陀螺QGyroscope *gyroscope;QGyroscopeReading *gyroreader;//加速度计QAccelerometer *acceler;QAccelerometerReading *accelereader;//旋转QRotationSensor *rotationSensor;QRotationReading *rotationReading;//光线QLightSensor *lightSensor;QLightReading *lightReading;
};#endif // APP_H
#include "app.h"
#include <QtConcurrent>
#include <chrono>
#include <thread>
#include <QJsonDocument>
#include <QJsonArray>
#include <QJsonObject>
#include <QJsonValue>App::App(QObject *parent): QObject{parent}
{}void App::start(QString ip)
{udplink.setAddress(ip,8023);qDebug()<<"start "<<ip;gyroscope = new QGyroscope(this);connect(gyroscope, &QGyroscope::readingChanged, this, [&](){gyroreader = gyroscope->reading();QJsonObject obj_root;QJsonArray arr;qreal gyroscopex = gyroreader->x();qreal gyroscopey = gyroreader->y();qreal gyroscopez = gyroreader->z();arr.append(QString::number(gyroscopex,'f',2));arr.append(QString::number(gyroscopey,'f',2));arr.append(QString::number(gyroscopez,'f',2));obj_root.insert("QGyroscope",arr);QJsonDocument jsonDocu(obj_root);QByteArray jsonData = jsonDocu.toJson();udplink.sendData(jsonData);emit gyroValue(gyroscopex,gyroscopey,gyroscopez);});acceler = new QAccelerometer(this);acceler->setAccelerationMode(QAccelerometer::Combined);connect(acceler, &QAccelerometer::readingChanged, this, [&](){accelereader = acceler->reading();QJsonObject obj_root;QJsonArray arr;qreal accelerx = accelereader->x();qreal accelery = accelereader->y();qreal accelerz = accelereader->z();arr.append(QString::number(accelerx,'f',2));arr.append(QString::number(accelery,'f',2));arr.append(QString::number(accelerz,'f',2));obj_root.insert("QAccelerometer",arr);QJsonDocument jsonDocu(obj_root);QByteArray jsonData = jsonDocu.toJson();udplink.sendData(jsonData);emit accelerValue(accelerx,accelery,accelerz);});rotationSensor = new QRotationSensor(this);connect(rotationSensor, &QRotationSensor::readingChanged, this, [&](){rotationReading = rotationSensor->reading();QJsonObject obj_root;QJsonArray arr;qreal rotationx = rotationReading->x();qreal rotationy = rotationReading->y();qreal rotationz = rotationReading->z();arr.append(QString::number(rotationx,'f',2));arr.append(QString::number(rotationy,'f',2));arr.append(QString::number(rotationz,'f',2));obj_root.insert("QRotationSensor",arr);QJsonDocument jsonDocu(obj_root);QByteArray jsonData = jsonDocu.toJson();udplink.sendData(jsonData);emit rotationValue(rotationx,rotationy,rotationz);});lightSensor = new QLightSensor(this);connect(lightSensor, &QLightSensor::readingChanged, this, [&](){lightReading = lightSensor->reading();QJsonObject obj_root;QJsonArray arr;qreal lux = lightReading->lux();arr.append(QString::number(lux,'f',2));obj_root.insert("QLightSensor",arr);QJsonDocument jsonDocu(obj_root);QByteArray jsonData = jsonDocu.toJson();udplink.sendData(jsonData);emit lightValue(lux);});if(gyroscope->start()&&acceler->start()&&rotationSensor->start()&&lightSensor->start()){setIsRuning(true);emit logInfo(QString::fromUtf8("启动成功"));}else{setIsRuning(false);emit logInfo(QString::fromUtf8("启动失败"));}
}void App::stop()
{gyroscope->stop();acceler->stop();rotationSensor->stop();lightSensor->stop();setIsRuning(false);
}bool App::getIsRuning() const
{return isRuning;
}void App::setIsRuning(bool newIsRuning)
{if (isRuning == newIsRuning)return;isRuning = newIsRuning;emit isRuningChanged();
}import QtQuick 2.15
import QtQuick.Window 2.15
import QtQuick.Controls 2.15
import QtQuick.Layouts 1.15
import App 1.0Window {id:rootwidth: 640height: 480visible: truetitle: qsTr("数据采集")App{id:apponGyroValue: {var str = '陀螺仪:'+x.toFixed(2)+' '+y.toFixed(2)+' '+z.toFixed(2)gyroLabel.text = str}onAccelerValue: {var str = '加速度计:'+x.toFixed(2)+' '+y.toFixed(2)+' '+z.toFixed(2)accelerLabel.text = str}onRotationValue: {var str = '旋转:'+x.toFixed(2)+' '+y.toFixed(2)+' '+z.toFixed(2)rotationLabel.text = str}onLightValue: {var str = '光线:'+lux.toFixed(2)lightLabel.text=str}onLogInfo: {debugInof.text=str}}RowLayout{id:topBaranchors.margins: 5anchors.top: parent.topanchors.left: parent.leftspacing: 5Rectangle{id:addressLayout.alignment: Qt.AlignHCenterheight: linkBtn.heightwidth: 200border.color: "black"border.width: 1TextInput{id:ipanchors.fill: parentverticalAlignment:Text.AlignVCenterhorizontalAlignment:Text.AlignHCentertext: "192.168.1"}}Button{id:linkBtnLayout.alignment: Qt.AlignHCentertext: !app.isRuning?"启动":"停止"onClicked: {if(!app.isRuning){app.start(ip.text)}else{app.stop()}}}}ColumnLayout{anchors.left:parent.leftanchors.right:parent.rightanchors.top:topBar.bottomanchors.bottom:parent.bottomanchors.margins: 5Label{id:gyroLabelwidth: 200height: 50text: "陀螺仪"}Label{id:accelerLabelwidth: 200height: 50text: "加速度计"}Label{id:rotationLabelwidth: 200height: 50text: "旋转"}Label{id:lightLabelwidth: 200height: 50text:"光线"}TextEdit{id:debugInofheight: 50}}}
相关文章:
QML android 采集手机传感器数据 并通过udp 发送
利用 qt 开发 安卓 app ,采集手机传感器数据 并通过udp 发送 #ifndef UDPLINK_H #define UDPLINK_H#include <QObject> #include <QUdpSocket> #include <QHostAddress>class UdpLink : public QObject {Q_OBJECT public:explicit UdpLink(QObjec…...

stableDiffusion安装
下载git 下载python-3.10.6版本 clone git至本地 使用git clone命令 git clone https://github.com/AUTOMATIC1111/stable-diffusion-webui 更换pip源为为百度镜像 pip config --global set global.index-url https://mirror.baidu.com/pypi/simple 最后的镜像源链接 阿里云 h…...
)
QT基础教程(QPushButton及信号与槽)
文章目录 前言一、信号与槽二、QPushButton总结 前言 本篇文章来带大家学习QPushbutton和信号与槽,其中信号与槽是QT中的核心也是比较重要的一个知识点。 资料合集地微信公众号:优质程序猿一、信号与槽 信号与槽(Signals and Slots&#x…...

Android 实战项目分享(一)用Android Studio绘制贝塞尔曲线的艺术之旅
一、项目概述 欢迎来到创意之源!我们精心打造的绘图应用程序将带你进入一个充满艺术和技术的奇妙世界。通过使用Android Studio,我们实现了绘制贝塞尔曲线的功能,让你能够轻松创作出令人惊叹的艺术作品。不论你是热爱绘画的大学生还是渴望学习…...
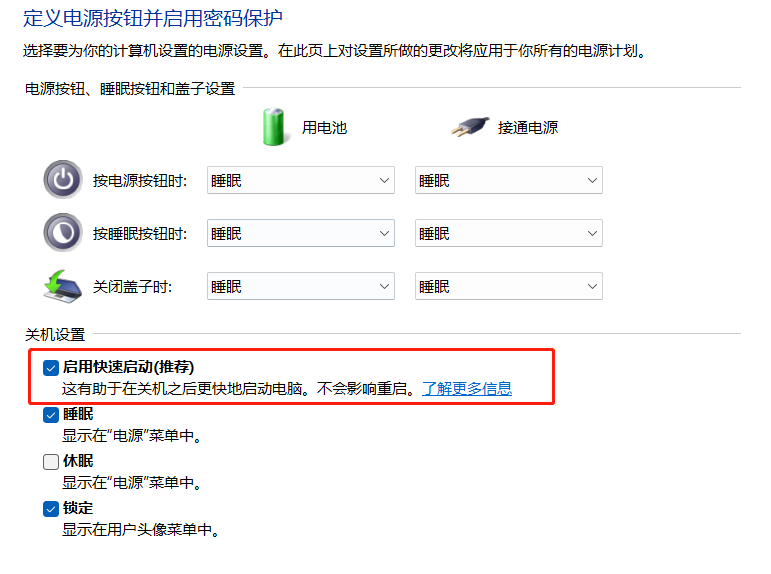
Windows系统关机后自动重启的解决方法
打开控制面板,找到【电源选项】; 方式一,打开Windows终端(管理员),输入“powercfg /h on”然后回车; 方式二,键盘按下开始键,搜索“控制面板”然后打开; 点击…...

微服务如何改变软件开发:实战经验与最佳实践分享
文章目录 什么是微服务?微服务实战经验1. 定义明确的服务边界2. 使用API网关3. 自动化部署和持续集成4. 监控和日志记录 微服务最佳实践1. 文档和通信2. 弹性设计3. 安全性4. 版本控制5. 监控和警报 微服务的未来 🎉欢迎来到架构设计专栏~微服务如何改变…...

安装深度(Deepin)系统
Deepin系统安装 Deepin是和Ubuntu一样,是一个基于Debian的Linux的发型版本。 Deepin相对于Ubuntu,Deepin更适合中国用户的使用习惯。 一 官网工具制作启动盘 制作启动盘、和安装系统,操作非常简单,nice! 官网提供了…...

Leetcode: 645.错误的集合 题解【超详细】
题目 集合 s 包含从 1 到 n 的整数。不幸的是,因为数据错误,导致集合里面某一个数字复制了成了集合里面的另外一个数字的值,导致集合 丢失了一个数字 并且 有一个数字重复 。 给定一个数组 nums 代表了集合 S 发生错误后的结果。 请你找出重复…...
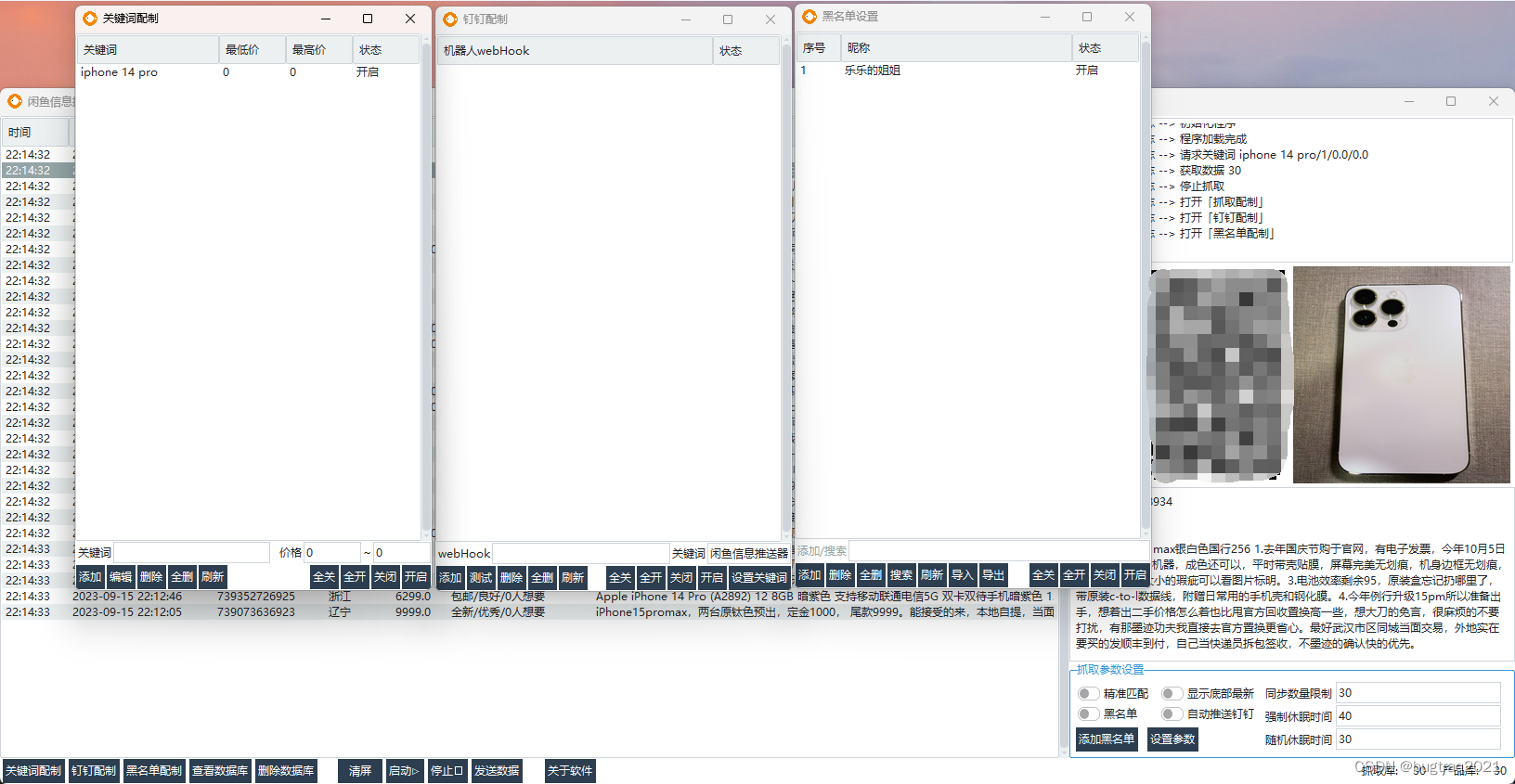
闲鱼自动化软件——筛选/发送系统 V22已经测试完毕
更新 因为闲鱼版本更新,以及闲鱼整个程序维护记录,又增加了一些优化和提升的代码,所以又一次在整体上更新了一版闲鱼的此款软件。 主要更新点: 1、添加显示自定义按钮,可以自动显示最新数据,也可以手动翻…...
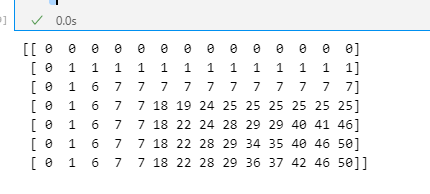
数学建模__动态规划
动态规划就是,将任务每一步均记录下来,以便将来重复使用时能够直接调用 问题描述:给定n个物品,每个物品的重量是Wi,价值是Vi,但是背包最多能装下capacity重量的物品,问我们如何选择才能利益最大化。 这里涉…...

【IoT】生产制造:锅仔片上机做 SMT 加工吗?
目录 简介 锅仔片 简介 由于最近做产品用到了锅仔按键,由于单品用量过多,但是成品锅仔按键价格又太高,不适合量产。 这个时候就想到了锅仔片,问题又来了,锅仔片是否可以上机呢? 答案是肯定的。 锅仔片…...

Stable Diffusion代码简介
Stable Diffusion是一个开源的实时数据流处理引擎,用于处理流式数据。其web UI提供了一个可视化界面来展示数据流的处理过程。 以下是Stable Diffusion web UI的详细代码说明: 1. 界面设计 Stable Diffusion web UI使用React框架进行开发,…...

操作系统的运行机制
1.程序的运行原理: 1.CPU执行指令的过程 C语言代码在编译器上“翻译”,得到二进制的机器指令。一条高级语言的代码翻译过来可能会对应多条机器指令。对于CPU来说,机器指令才是"能看得懂"的语言。程序运行的过程其实就是CPU执行一…...
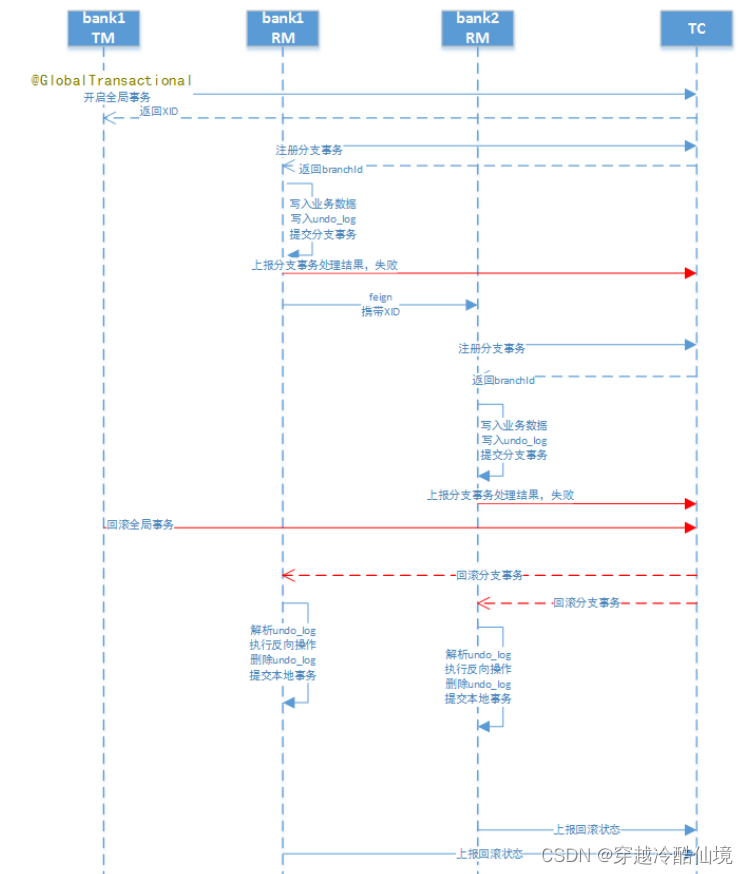
分布式事务解决方案之2PC
分布式事务解决方案之2PC 前面已经学习了分布式事务的基础理论,以理论为基础,针对不同的分布式场景业界常见的解决方案有2PC、 TCC、可靠消息最终一致性、最大努力通知这几种。 什么是2PC 2PC即两阶段提交协议,是将整个事务流程分为两个阶段…...

发现某设备 adb shell ps 没有输出完整信息
某错误示例 并不是都使用 -ef 参数查找都能够返回完整信息,某些版本设备不适用 -ef 也不会返回完整信息。 简单兼容 简单兼容不同版本 Android 设备查找进程列表,没有通过脚本判断 Android 版本,如有兴趣可以自己修改。 :loop adb shell…...

qt模拟鼠标事件
模拟鼠标事件 1、模拟鼠标按下事件2、模拟鼠标松开事件3、模拟鼠标点击事件4、模拟鼠标移动事件 1、模拟鼠标按下事件 QPoint p this->rect().center();QMouseEvent *pressEvent new QMouseEvent(QEvent::MouseButtonPress,p,Qt::LeftButton,Qt::LeftButton,Qt::NoModifie…...
Linux运维基础知识大全
一. Linux组成 1. 内核 内核:系统空间的代码和数据的集合称为内核(Kernel);kernel是操作系统内部最核心的软件,和硬件打交道的 1.对cpu进行管理,进程调度到cpu里进行管理 2.对内存进行空间的分配࿰…...
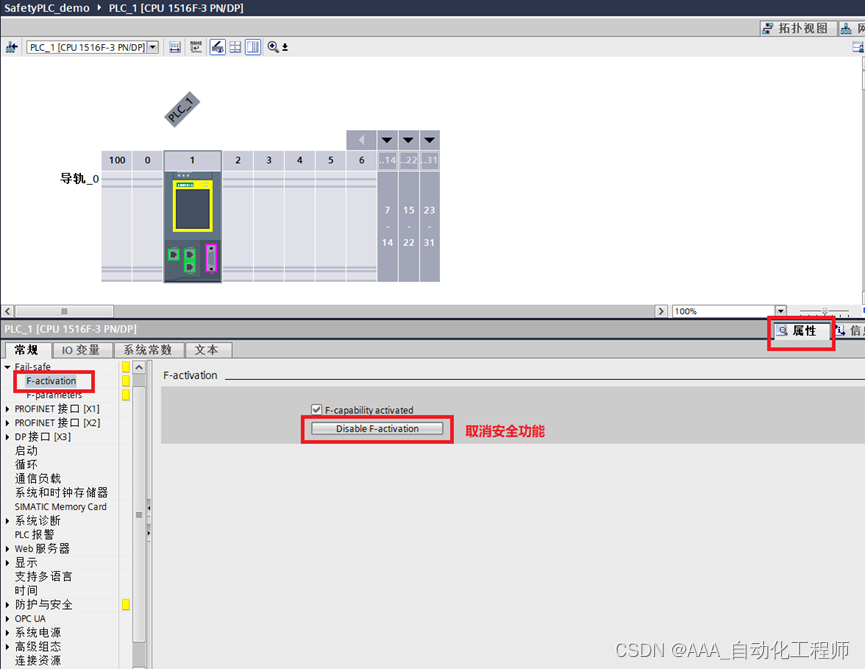
西门子S7-1200F或1500F系列安全PLC的组态步骤和基础编程(一)
西门子S7-1200F或1500F系列安全PLC的组态步骤和基础编程(一) 第一部分:组态配置 具体步骤可参考以下内容: 如下图所示,新建一个项目后,添加一个安全型PLC,这里以1516F-3 PN/DP为例进行说明, 如下图所示,添加CPU完成后,可以看到左侧的项目树中比普通的PLC多了几个选项…...
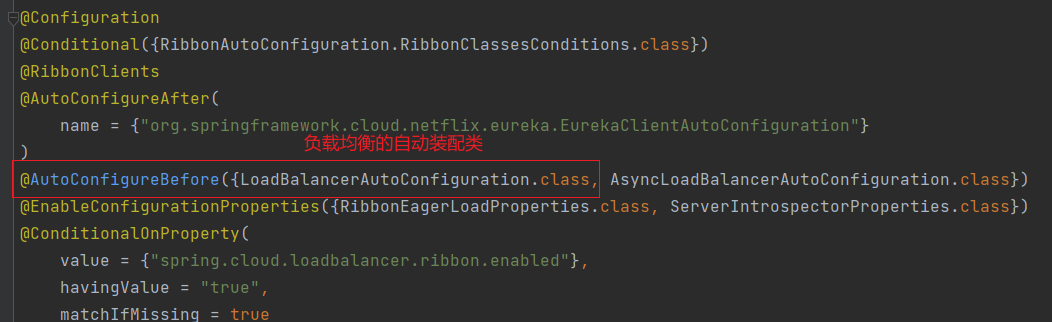
负载均衡-ribbon源码解析
负载均衡-ribbon源码解析 1 LoadBalanced注解 /*** 基于ribbon调用服务及负载均衡* return*/ LoadBalanced Bean public RestTemplate restTemplate(){return new RestTemplate(); }Bean ConditionalOnMissingBean public RestTemplateCustomizer restTemplateCustomizer(fin…...

SideBar 侧边导航与内容区域交互重写【Ant Design Mobile】
需求:SideBar 侧边导航与内容区域交互 点击侧边栏某一项时,相对应内容区域滚动到视口顶部滚动视口区域,到某一项内容区域,侧边栏选中状态也会跟着变化 const SideBarAgain: React.FC<PopupProps> (props) > {// 父组件…...

AI智能体任务编排框架:从概念到实战的Mission Control指南
1. 项目概述:为AI智能体打造一个“任务控制中心”最近在折腾AI智能体(Agent)的开发,发现一个挺普遍的问题:当你想让多个智能体协同工作,或者想让单个智能体执行一系列复杂、有依赖关系的任务时,…...

终极FGO自动化助手:告别枯燥刷本,每天节省3小时游戏时间
终极FGO自动化助手:告别枯燥刷本,每天节省3小时游戏时间 【免费下载链接】FGA Auto-battle app for F/GO Android 项目地址: https://gitcode.com/gh_mirrors/fg/FGA Fate/Grand Automata(简称FGA)是一款专为Fate/Grand Or…...

终极游戏性能调优指南:DLSS Swapper智能管理工具深度解析
终极游戏性能调优指南:DLSS Swapper智能管理工具深度解析 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper 游戏体验痛点剖析:当DLSS版本成为性能瓶颈 你是否曾在畅玩《赛博朋克2077》时…...
)
STM8硬件IIC驱动BNO055传感器避坑指南(附完整代码)
STM8硬件IIC驱动BNO055传感器实战解析与优化 BNO055作为一款集成了9轴传感器融合算法的智能芯片,能够直接输出姿态角数据,极大简化了嵌入式系统中姿态解算的复杂度。然而在实际应用中,许多开发者发现使用STM32等常见MCU的模拟IIC接口难以稳定…...

OpenClaw 小龙虾智能体联动 DeepSeek 大模型部署实操攻略
前置准备 获取小龙虾open claw一键安装包(www.totom.top)并安装电脑端已成功安装并正常启动OpenClaw,右上角 Gateway 状态显示在线设备网络通畅,可正常访问 DeepSeek 开放平台拥有可接收验证码的手机号 / 微信,用于平…...

Arm Iris调试接口:架构设计与工程实践详解
1. Iris调试与追踪接口深度解析调试与追踪技术是嵌入式系统开发的核心支柱,而Arm的Iris接口代表了这一领域的最新进展。作为一名长期从事嵌入式调试工具开发的工程师,我将带您深入剖析这套接口的设计哲学与实战应用。1.1 接口架构设计理念Iris的架构设计…...

MedAgentBench:大语言模型在医学诊断中的动态评估与智能体构建实践
1. 项目概述:当大语言模型成为医学诊断的“实习生”最近在医学人工智能的圈子里,一个名为MedAgentBench的项目引起了我的注意。它来自斯坦福大学机器学习组,这个名字本身就自带光环。简单来说,这不是一个直接看病的AI,…...

Claude API封装项目深度解析:从安全评估到自主构建代码助手
1. 项目概述与核心价值 最近在GitHub上看到一个挺有意思的项目,叫 ashish200729/claude-code-source-code 。光看这个标题,很多开发者朋友可能会心头一热,以为这是某个AI模型的源代码被开源了。但作为一个在开源社区混迹多年的老码农&…...
)
从安迪·沃霍尔到AI画布:波普艺术三大视觉基因拆解,手把手复刻金罐头/玛丽莲肖像风格(含可复用prompt模板库)
更多请点击: https://intelliparadigm.com 第一章:从安迪沃霍尔到AI画布:波普艺术的范式迁移 安迪沃霍尔用丝网印刷将可口可乐瓶与玛丽莲梦露转化为大众文化的图腾,其核心并非复制,而是对**重复、去个性化与媒介即内容…...

017、Docker在TinyML开发中的应用
017 Docker在TinyML开发中的应用 从一次“环境地狱”说起 上个月帮团队调一个STM32上的TinyML推理延迟问题,模型是MobileNetV2量化版,在开发板上跑得好好的,换到同事的Ubuntu 20.04机器上编译,死活链接不上CMSIS-NN库。折腾半天发现他系统里默认的arm-none-eabi-gcc版本是…...