DMNet复现(一)之数据准备篇:Density map guided object detection in aerial image
一、生成密度图
密度图标签生成
采用以下代码,生成训练集密度图gt:
import cv2
import glob
import h5py
import scipy
import pickle
import numpy as np
from PIL import Image
from itertools import islice
from tqdm import tqdm
from matplotlib import pyplot as plt
from sortedcontainers import SortedDict
from scipy.ndimage.filters import gaussian_filter
from scipy.spatial import KDTree
import argparse"""
Code for DMnet, density map ground truth generation
Author: Changlin Li
Code revised on : 7/15/2020Given dataset(train/val/test) generate ground truth for given dataset.
Default format for source data: The input images are in jpg format and raw annotations are in txt format
(Based on Visiondrone 2018/19/20 dataset)Sample code to run:python Generate_density_map_official.py . gaussian_kernels.pkl distances_dict.pkl --mode val
"""# point_class_pair = {}
# annotation_stats = {0: 17, 1: 14, 2: 20, 3: 32, 4: 35, 5: 45, 6: 29, 7: 30, 8: 46, 9: 18}
# min_sigma, max_sigma = min(annotation_stats.values()), max(annotation_stats.values())
# print(min_sigma, max_sigma)def get_img_paths(path_sets):"""Return all images from all pathes in 'path_sets'"""img_paths = []for path in path_sets:for img_path in glob.glob(os.path.join(path, '*.jpg')):img_paths.append(img_path)return img_pathsdef save_computed_density(density_map, out_path):"""Save density map to h5py format"""with h5py.File(out_path, 'w') as hf:hf['density'] = density_mapdef compute_sigma(gt_count, distance=None, min_sigma=1, method=1, fixed_sigma=15):"""Compute sigma for gaussian kernel with different methods :* method = 1 : sigma = (sum of distance to 3 nearest neighbors) / 10* method = 2 : sigma = distance to nearest neighbor* method = 3 : sigma = fixed value** if sigma lower than threshold 'min_sigma', then 'min_sigma' will be used** in case of one point on the image sigma = 'fixed_sigma'"""if gt_count > 1 and distance is not None:if method == 1:sigma = np.mean(distance[1:4]) * 0.1elif method == 2:sigma = distance[1]elif method == 3:sigma = fixed_sigmaelse:sigma = fixed_sigmaif sigma < min_sigma:sigma = min_sigmareturn sigmadef find_closest_key(sorted_dict, key):"""Find closest key in sorted_dict to 'key'"""keys = list(islice(sorted_dict.irange(minimum=key), 1))keys.extend(islice(sorted_dict.irange(maximum=key, reverse=True), 1))return min(keys, key=lambda k: abs(key - k))def gaussian_filter_density(non_zero_points, map_h, map_w, distances=None, kernels_dict=None, min_sigma=2, method=1,const_sigma=15):"""Fast gaussian filter implementation : using precomputed distances and kernels"""gt_count = non_zero_points.shape[0]density_map = np.zeros((map_h, map_w), dtype=np.float32)for i in range(gt_count):point_x, point_y, category = non_zero_points[i]sigma = compute_sigma(gt_count, distances[i], min_sigma=min_sigma, method=method, fixed_sigma=const_sigma)# closest_sigma = annotation_stats[category]closest_sigma = find_closest_key(kernels_dict, sigma)# print(i,closest_sigma)kernel = kernels_dict[closest_sigma]full_kernel_size = kernel.shape[0]kernel_size = full_kernel_size // 2min_img_x = max(0, point_x - kernel_size)min_img_y = max(0, point_y - kernel_size)max_img_x = min(point_x + kernel_size + 1, map_w - 1)max_img_y = min(point_y + kernel_size + 1, map_h - 1)assert max_img_x > min_img_xassert max_img_y > min_img_ykernel_x_min = kernel_size - point_x if point_x <= kernel_size else 0kernel_y_min = kernel_size - point_y if point_y <= kernel_size else 0kernel_x_max = kernel_x_min + max_img_x - min_img_xkernel_y_max = kernel_y_min + max_img_y - min_img_yassert kernel_x_max > kernel_x_minassert kernel_y_max > kernel_y_mindensity_map[min_img_y:max_img_y, min_img_x:max_img_x] += kernel[kernel_y_min:kernel_y_max,kernel_x_min:kernel_x_max]return density_mapdef get_gt_dots(ann_path, img_height, img_width, mode="train"):"""Load Matlab file with ground truth labels and save it to numpy array.** cliping is needed to prevent going out of the array"""txt_list = open(ann_path, 'r').readlines()gt = format_label(mode, txt_list)assert gt.shape[1] == 3gt[:, 0] = gt[:, 0].clip(0, img_width - 1)gt[:, 1] = gt[:, 1].clip(0, img_height - 1)return gtdef set_circles_on_img(image, bbox_list, circle_size=2):"""Set circles on images at centers of bboxes in bbox_list"""for bbox in bbox_list:cv2.circle(image, (bbox[0], bbox[1]), circle_size, (255, 0, 0), -1)return imagedef generate_gaussian_kernels(out_kernels_path='gaussian_kernels.pkl', round_decimals=3, sigma_threshold=4, sigma_min=0,sigma_max=20, num_sigmas=801):"""Computing gaussian filter kernel for sigmas in linspace(sigma_min, sigma_max, num_sigmas) and saving them to dict. """if os.path.exists(out_kernels_path):# If kernel has been pre-computed, then returnprint("Kernel already created!\nExiting...\n")returnkernels_dict = dict()sigma_space = np.linspace(sigma_min, sigma_max, num_sigmas)for sigma in tqdm(sigma_space):sigma = np.round(sigma, decimals=round_decimals)kernel_size = np.ceil(sigma * sigma_threshold).astype(np.int)img_shape = (kernel_size * 2 + 1, kernel_size * 2 + 1)img_center = (img_shape[0] // 2, img_shape[1] // 2)arr = np.zeros(img_shape)arr[img_center] = 1arr = scipy.ndimage.filters.gaussian_filter(arr, sigma, mode='constant')kernel = arr / arr.sum()kernels_dict[sigma] = kernelprint(f'Computed {len(sigma_space)} gaussian kernels. Saving them to {out_kernels_path}')with open(out_kernels_path, 'wb') as f:pickle.dump(kernels_dict, f)def compute_distances(out_dist_path='distances_dict.pkl', raw_label_dir='D:/BaiduNetdiskDownload/VisDrone', n_neighbors=4,leafsize=1024, data_limit=None, mode="train", img_affix=".jpg"):if os.path.exists(out_dist_path):# If distance has been computed, then directly load distance file.print("Distrance pre-computation already created!\nExiting...\n")returndistances_dict = dict()full_img_paths = glob.glob(f'{raw_label_dir}/VisDrone2019-DET-train/images/*' + img_affix) + \glob.glob(f'{raw_label_dir}/VisDrone2019-DET-val/images/*' + img_affix) + \glob.glob(f'{raw_label_dir}/VisDrone2019-DET-test-dev/images/*' + img_affix)if data_limit and data_limit < len(full_img_paths):full_img_paths = full_img_paths[:data_limit]for img_path in tqdm(full_img_paths):ann_path = img_path.replace(img_affix, '.txt')ann_path = ann_path.replace("images", "annotations")img = plt.imread(img_path)non_zero_points = get_gt_dots(ann_path, *img.shape[0:2], mode=mode)tree = KDTree(non_zero_points.copy(), leafsize=leafsize) # build kdtreedistances, _ = tree.query(non_zero_points, k=n_neighbors) # query kdtreedistances_dict[img_path] = distancesprint(f'Distances computed for {len(full_img_paths)}. Saving them to {out_dist_path}')with open(out_dist_path, 'wb') as f:pickle.dump(distances_dict, f)def format_label(mode, txt_list):format_data = []# required format: xmin, ymin, xmax, ymax, class_id, clockwise direction# Given format: <bbox_left>,<bbox_top>,<bbox_width>,<bbox_height>,class_idfor idx, i in enumerate(txt_list):coord_raw = [int(x) for x in i.replace("\n", "").split(',') if len(x) != 0]coord = coord_raw[:6]# print(coord)if len(coord) != 6:# 4 coord + 1 classprint("Failed to parse annotation!")exit()# if coord[-1] not in class_list and coord[-1]>len(class_list):# print('warning found a new label :', coord[-1])# exit()if coord[2] <= 0 or coord[3] <= 0:print("Error encountered!\nFind out 0 height(width)!")print("This bounding box has been discarded! ")continue# print("Pull out corrd matrix:\n")# print(coord)# exit(-1)if not 0 < coord[-1] < 11:# class 0 and 11 are not in our interestcontinueif mode == "VisDrone2019-DET-val" or "VisDrone2019-DET-test":# in this case, score is the last 2 element.# No consideration for score 0 in evalif int(coord[-2]) == 0:continueif int(coord_raw[-2]) == 2:continuebbox_left, bbox_top = coord[0], coord[1]bbox_right, bbox_bottom = coord[0] + coord[2], coord[1] + coord[3]# Scale class number back to range 0-9center_x, center_y = int((bbox_left + bbox_right) * 0.5), int((bbox_top + bbox_bottom) * 0.5)format_data.append([center_x, center_y, coord[-1] - 1])# if not filename:# continue# if filename not in point_class_pair:# point_class_pair[filename] = {}# coord_pair = str(center_x) + " " + str(center_y)# if coord_pair not in point_class_pair[filename]:# point_class_pair[filename][coord_pair] = coord[-1] - 1# else:# if point_class_pair[filename][coord_pair] != coord[-1] - 1:# assert True, \# "duplicate coordination shows in current file : " + str(filename)return np.array(format_data)def parse_args():parser = argparse.ArgumentParser(description='DMNet--Density map ground truth generation')parser.add_argument('root_dir', default=".",help='the path for source data')parser.add_argument('precomputed_kernels_path', default="gaussian_kernels.pkl",help='the path to save precomputed kernels')parser.add_argument('precomputed_distances_path', default="distances_dict.pkl",help='the path to save precomputed distance')parser.add_argument('--image_prefix', default=".jpg", help='the path to save precomputed distance')parser.add_argument('--mode', default="train", help='Indicate if you are working on train/val/test set')parser.add_argument('--showden', action='store_true', help='show results')args = parser.parse_args()return argsif __name__ == "__main__":# General setupargs = parse_args()data_limit = Noneprecomputed_kernels_path = args.precomputed_kernels_pathprecomputed_distances_path = args.precomputed_distances_pathimg_affix = args.image_prefixshowden = args.showdenmode = args.moderoot_dir = args.root_dirmin_sigma = 0max_sigma = 20# create dir to save train/val density mapif not os.path.exists(os.path.join('/root/autodl-tmp/VisDrone2019/VisDrone2019-DET-train', 'dens')):os.makedirs(os.path.join('/root/autodl-tmp/VisDrone2019/VisDrone2019-DET-train', 'dens'), exist_ok=True)if not os.path.exists(os.path.join('/root/autodl-tmp/VisDrone2019/VisDrone2019-DET-val', 'dens')):os.makedirs(os.path.join('/root/autodl-tmp/VisDrone2019/VisDrone2019-DET-val', 'dens'), exist_ok=True)if not os.path.exists(os.path.join('/root/autodl-tmp/VisDrone2019/VisDrone2019-DET-test-dev', 'dens')):os.makedirs(os.path.join('/root/autodl-tmp/VisDrone2019/VisDrone2019-DET-test-dev', 'dens'), exist_ok=True)# create pre-computed kernel to speed up density map generationgenerate_gaussian_kernels(precomputed_kernels_path, round_decimals=3, sigma_threshold=4,sigma_min=min_sigma, sigma_max=max_sigma, num_sigmas=801)with open(precomputed_kernels_path, 'rb') as f:kernels_dict = pickle.load(f)kernels_dict = SortedDict(kernels_dict)# uncomment to generate and save dict with distancescompute_distances(out_dist_path=precomputed_distances_path, raw_label_dir=root_dir, mode=mode)with open(precomputed_distances_path, 'rb') as f:distances_dict = pickle.load(f)# print(distances_dict)data_root = modeimg_paths = glob.glob(f'{root_dir}/{data_root}/images/*.jpg')method = 3const_sigma = 15with open(str(mode) + ".txt", "w") as fileloader:# Prepared for the training algorithms that requires a txt output file# with all input images listedfor img_path in tqdm(img_paths):fileloader.write(img_path)fileloader.write("\n")data_folder, img_sub_path = img_path.split('images')ann_path = img_path.replace(img_affix, '.txt')ann_path = ann_path.replace("images", 'annotations')# load img and gtimg = Image.open(img_path)# print(img_path)width, height = img.sizegt_points = get_gt_dots(ann_path, height, width, mode=mode)distances = distances_dict[img_path]density_map = gaussian_filter_density(gt_points, height, width, distances,kernels_dict, min_sigma=min_sigma, method=method,const_sigma=const_sigma)den_name = os.path.join(root_dir, data_root, "dens", img_path.split("/")[-1].replace("jpg", "npy"))print(den_name)if showden:plt.imshow(img)plt.imshow(density_map, alpha=0.75)plt.show()else:np.save(den_name, density_map)
使用以下命令进行创建:
# 生成训练集gt密度图
python image_cropping/Generate_density_map_official.py /root/autodl-tmp/VisDrone2019 gaussian_kernels.pkl distances_dict.pkl --mode VisDrone2019-DET-train
# 生成验证集gt密度图
python image_cropping/Generate_density_map_official.py /root/autodl-tmp/VisDrone2019 gaussian_kernels.pkl distances_dict.pkl --mode VisDrone2019-DET-val
# 生成测试集gt密度图
python image_cropping/Generate_density_map_official.py /root/autodl-tmp/VisDrone2019 gaussian_kernels.pkl distances_dict.pkl --mode VisDrone2019-DET-test-dev

在以上文件夹 生成了如下的dens文件夹 保存了密度图的npy文件。
密度图预测
根据官方仓库说明 下载MCNN代码 进行训练预测即可
裁剪区域
# 生成训练集
python image_cropping/density_slide_window_official.py /root/autodl-tmp/VisDrone2019 70_70 0.08 --output_folder /root/autodl-tmp/VisDrone2019/Crop_70_0.08 --mode VisDrone2019-DET-train
# 生成验证集
python image_cropping/density_slide_window_official.py /root/autodl-tmp/VisDrone2019 70_70 0.08 --output_folder /root/autodl-tmp/VisDrone2019/Crop_70_0.08 --mode VisDrone2019-DET-val# 生成测试集
python image_cropping/density_slide_window_official.py /root/autodl-tmp/VisDrone2019 70_70 0.08 --output_folder /root/autodl-tmp/VisDrone2019/Crop_70_0.08 --mode VisDrone2019-DET-test-dev
部分切分后的效果图,可以看到部分目标还是存在截断现象,是一个优化点。





由于不清楚是否会将crop后的图像与标签,用于到训练过程中,这里我就不生成训练的crop图和标签了,下一步准备直接用训练好的模型进行融合测试。论文是采用验证集进行测试的,这儿我准备把验证集和测试集(test-dev)都测试一遍。

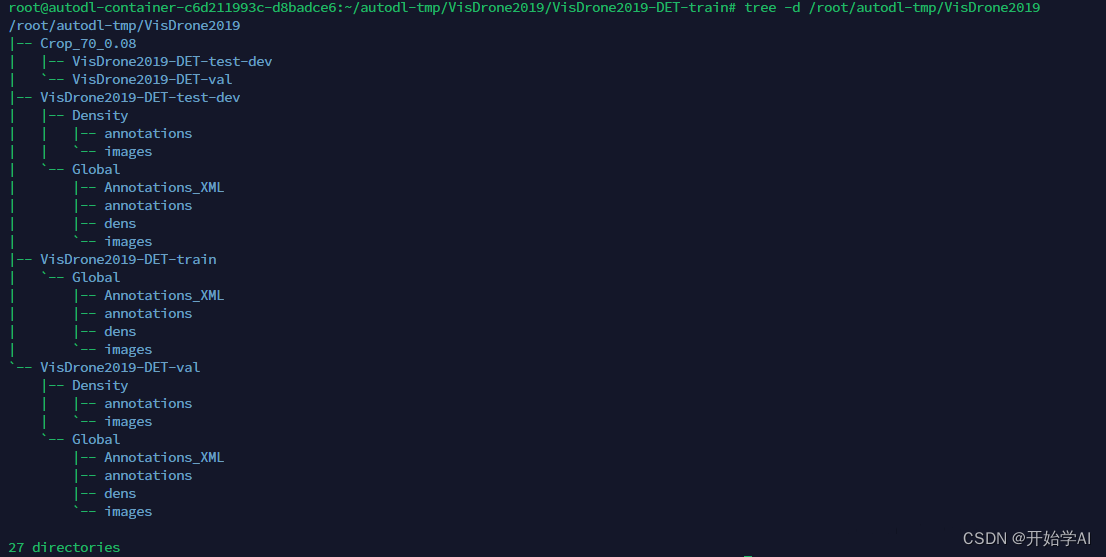
最后按以下结构需要组织一下文件
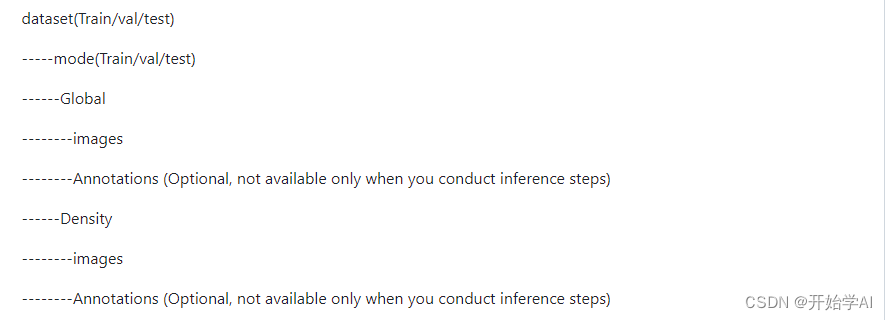
最后我的目录结构如下
数据格式转换
需要先把txt转为voc,再把voc转为coco
# 生成测试集的voc格式
python fusion_detection/create_VOC_annotation_official.py /root/autodl-tmp/VisDrone2019 --output_folder VisDrone2019_finally --mode VisDrone2019-DET-test-dev
# 生成测试集的coco格式
python fusion_detection/VOC2coco_official.py /root/autodl-tmp/VisDrone2019/VisDrone2019_finally --mode VisDrone2019-DET-test-dev
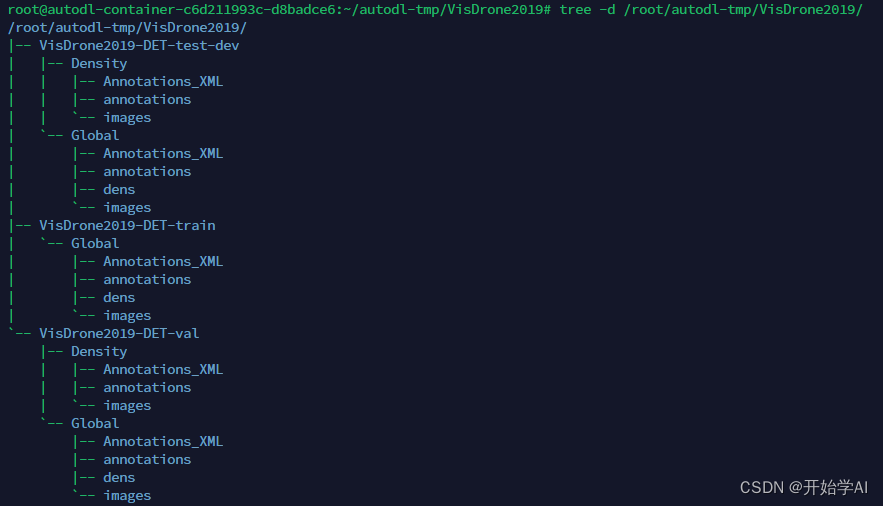
这过程太耗时间了。最后把中间文件夹删除,整个格式如以下:
其中coco的json文件在以下位置
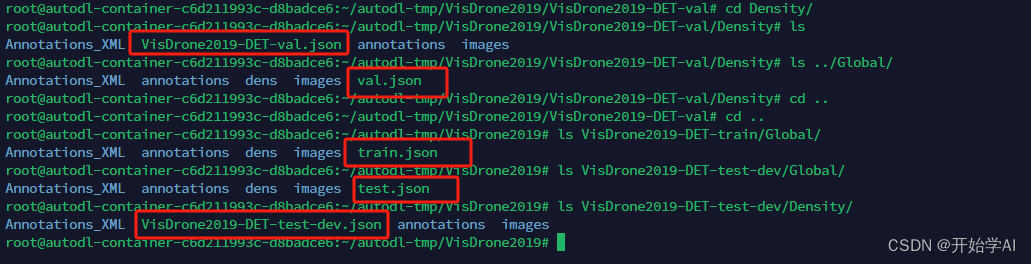
过程太繁琐了。
有需要生成后的数据,可以联系!
相关文章:
DMNet复现(一)之数据准备篇:Density map guided object detection in aerial image
一、生成密度图 密度图标签生成 采用以下代码,生成训练集密度图gt: import cv2 import glob import h5py import scipy import pickle import numpy as np from PIL import Image from itertools import islice from tqdm import tqdm from matplotli…...

k8s相关命令-命名空间
k8s相关命令目录 文章目录 前言一、创建命名空间二、删除命名空间三、查看命名空间列表四、查看命名空间列表五、查看特定命名空间下所有资源六、删除特定命名空间下所有资源 前言 记录k8s命名空间的相关操作命令 一、创建命名空间 kubectl create namespace <namespace&g…...

CG Magic分享同一场景里下,VR渲染器和CR渲染器哪个好?
渲染操作时,VR渲染器和CR渲染器的对比成为常见问题了。这个问题很多人都会问。 今天CG Magic小编通过一个真实的项目,就是同一场景下来比较一下VR渲染器和CR渲染器的区别。 以下图为例是用来测试的场景当年的最终图。采用了当年的一个伊丽莎白大街152号的…...
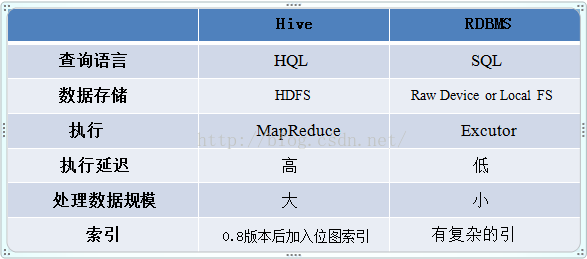
Hive工作原理
Hive 工作原理详解-阿里云开发者社区 Hive的服务端组件 1. Driver组件:该组件包括:Compiler、Optimizer、Executor,它可以将Hive的编译、解析、优化转化为MapReduce任务提交给Hadoop1中的JobTracker或者是Hadoop2中的SourceManager来进行实际的执行相应…...

vue 使用this.$set设置对象属性值时,不更新试图
vue 使用this.$set设置对象属性值时,不更新试图。 后来发现是因为若对象中存在该属性时,只更新值,不添加响应监测。 //vue/src/core/observer/index.js 源码片段/*** Set a property on an object. Adds the new property and* triggers ch…...

uniapp视频播放功能
UniApp提供了多种视频播放组件,包括视频播放器(video)、多媒体组件(media)、WebView(内置Video标签)等。其中,video和media组件是最常用的。 video组件 video组件是基于HTML5 vide…...

Java面向对象七大原则以及设计模式单例模式和工厂模式简单工厂模式
面向对象的七大原则(OOP) 1,开闭原则: 对扩展开发,对修改关闭 2.里氏替换原则: 继承必须确保超类所拥有的子类的性质在子类中仍然成立 3.依赖倒置原则: 面向接口编程,不要面向实现编程&am…...

Linux 遍历目录(cd 命令)
Linux 遍历目录(cd 命令) 文章目录 Linux 遍历目录(cd 命令)一、cd 命令二、绝对文件路径三、相对文件路径 一、cd 命令 在 Linux 文件系统上,可以使用 cd 命令将 shell 会话切换到另一个目录。cd 命令的格式也很简单…...
整合Nginx实现反向代理
针对后端启动多个服务,接口需要统一请求路径时,可以使用nginx进行请求地址反向代理。 1.下载: nginx 2.下载完成后解压,找到配置文件nginx.conf(在解压文件的conf目录中),在http中增加以下示例代码&#x…...

Linux:IP转INT详解
一、IP地址介绍 IP地址(Internet Protocol Address)是指互联网协议地址,是所有连接到网络设备的唯一标识符。IP地址由32位二进制数表示,通常以四段十进制数(每个数值范围为0-255)表示,例如192.1…...
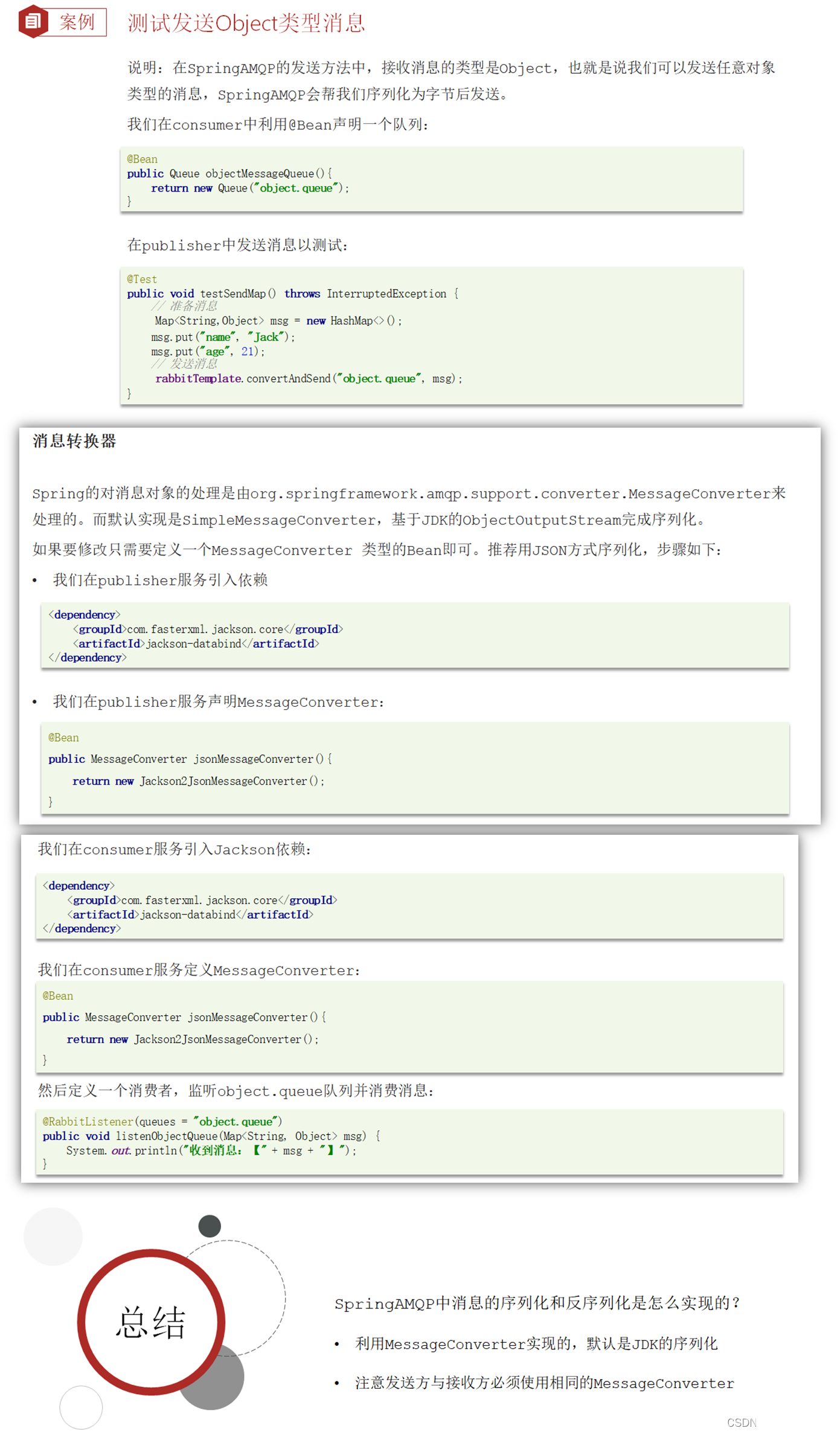
43.MQ—RabbitMQ
目录 一、MQ—RabbitMQ。 (1)同步调用与异步调用。 (1.1)同步调用。 (1.2)异步调用。 (2)MQ之间的区别。 (3)RabbitMQ学习。 (3.1…...
)
Leetcode154. 寻找旋转排序数组中的最小值(存在重复元素)
力扣(LeetCode)官网 - 全球极客挚爱的技术成长平台 已知一个长度为 n 的数组,预先按照升序排列,经由 1 到 n 次 旋转 后,得到输入数组。例如,原数组 nums [0,1,4,4,5,6,7] 在变化后可能得到:…...

docker查看镜像的latest对应的具体版本
查询容器镜像时,TAG只显示latest,而不是显示具体的版本号 docker images # 显示内容 REPOSITORY TAG IMAGE ID CREATED SIZE nginx latest 605c77e624dd 20 months ago 141MB redis latest 7614ae945…...
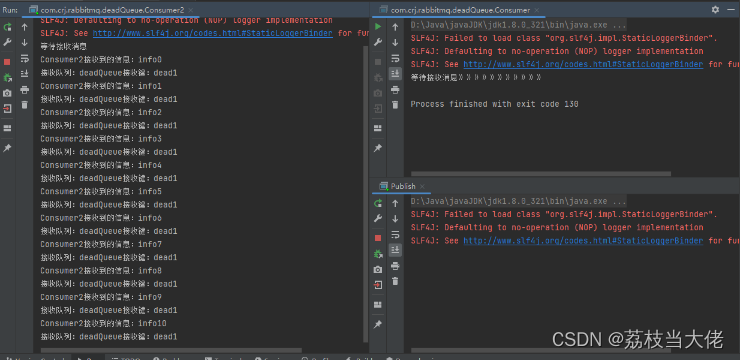
RabbitMQ深入 —— 死信队列
前言 前面荔枝梳理了RabbitMQ中的普通队列、交换机以及相关的知识,在这篇文章中荔枝将会梳理RabbitMQ的一个重要的队列 —— 死信队列,主要了解消息流转到死信队列的三种的方式以及相应的实现demo。希望能帮助到有需要的小伙伴~~~ 文章目录 前言 死信队…...

【React + Umi】自定义离开页面拦截弹框事件
在 react umi 中对离开页面的行为进行自定义弹窗拦截控制。以下为可选的方案分析。 wrapper 首先,因为项目框架是 umi,最先想到了 umi 路由的 wrapper 装饰器,但仔细一想又不太对, wrapper 争对于跳转到某个特定页面的前置行为…...
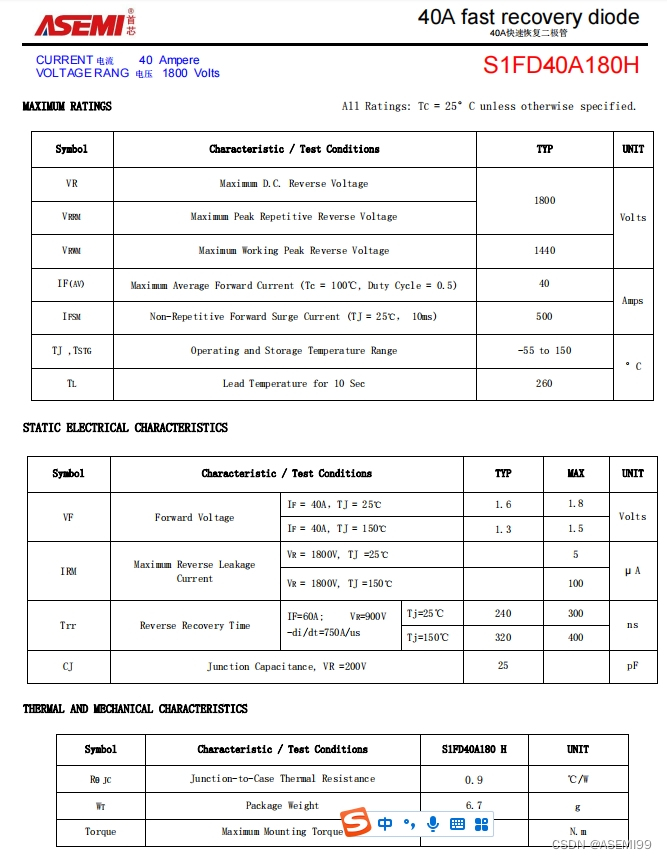
S1FD40A180H-ASEMI快恢复二极管S1FD40A180H
编辑:ll S1FD40A180H-ASEMI快恢复二极管S1FD40A180H 型号:S1FD40A180H 品牌:ASEMI 封装:TO-247 特性:大功率、快恢复二极管 正向电流:40A 反向耐压:1800V 恢复时间:<300n…...
网络编程 day1
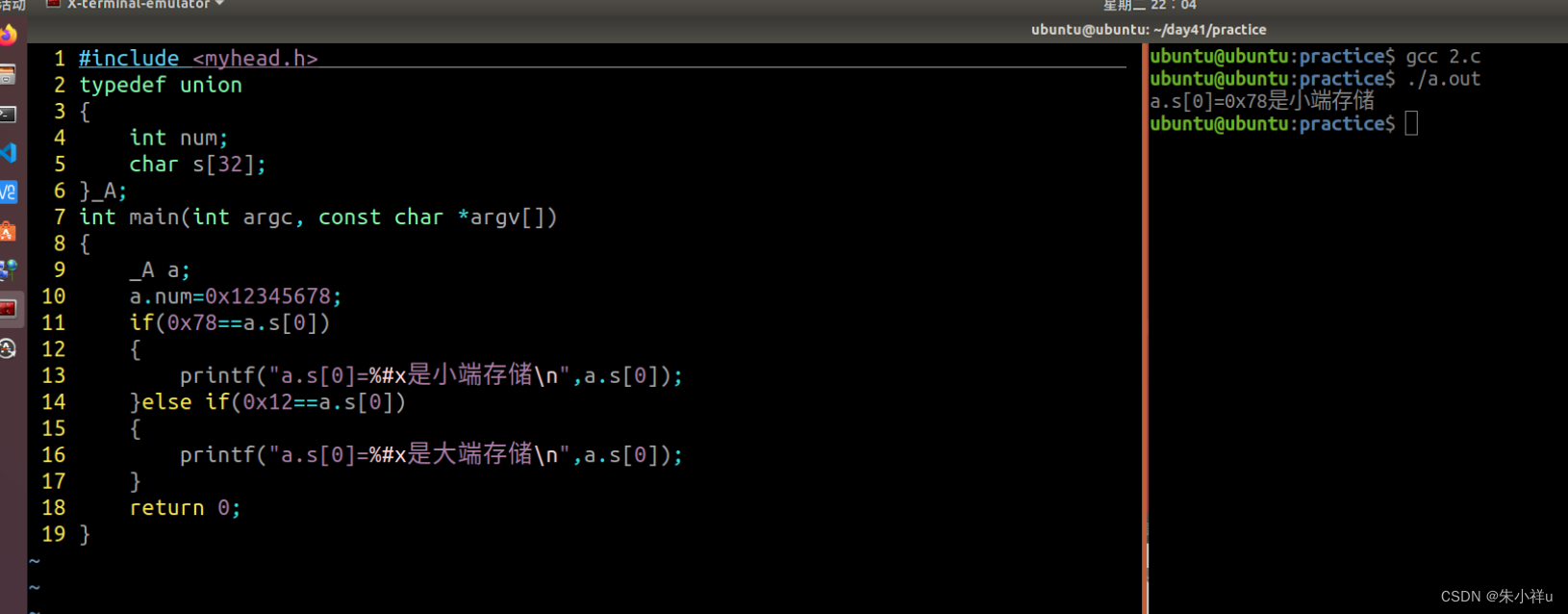
1->x.mind网络编程基础 2->简述字节序的概念,并用共用体(联合体)的方式计算本机的字节序 1.字节序是指不同类型的CPU主机,内存存储多字节整数序列的方式 2.小端字节序:低序字节存储在低地址上 3.大端字节序&a…...
《深入PostgreSQL的存储引擎:原理与性能》
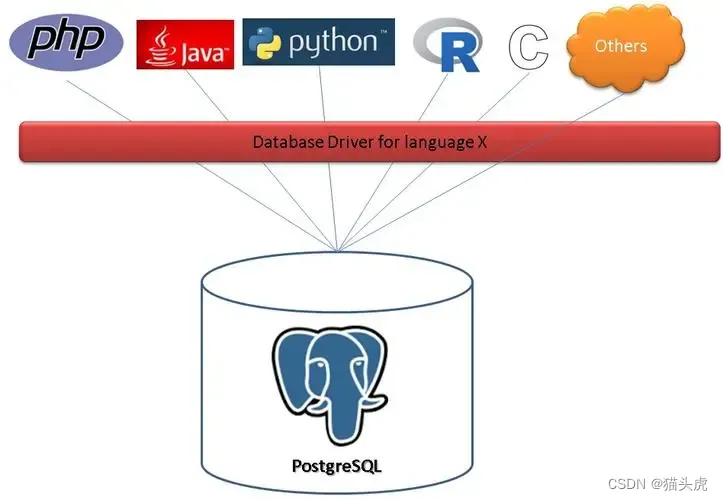
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🐅🐾猫头虎建议程序员必备技术栈一览表📖: 🛠️ 全栈技术 Full Stack: 📚…...

python开发之个微群聊机器人的开发
简要描述: 退出群聊 请求URL: http://域名地址/quitChatRoom 请求方式: POST 请求头Headers: Content-Type:application/jsonAuthorization:login接口返回 参数: 参数名必选类型说明wI…...
【Redis7】--4.事务、管道、发布和订阅
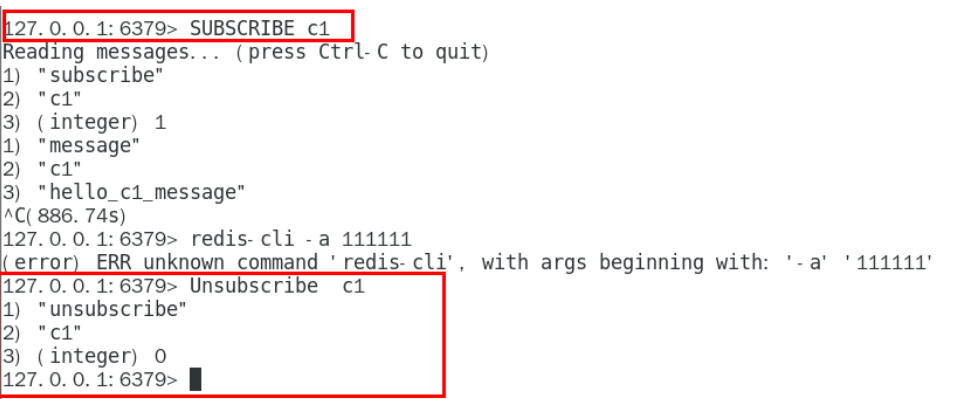
文章目录 事务1.Redis事务2.Redis事务特性3.Redis事务命令3.1MULTI3.2EXEC3.3DISCARD3.4WATCH3.5UNWATCH 4.不保证原子性4.1"全体连坐"4.2"冤头债主" 5.事务执行流程 管道1.pipeline的使用2.pipeline小总结 发布和订阅1.常用命令1.1SUBSCRIBE1.2PUBLISH1.3…...

Keil5 UV4目录下的global.prop文件,除了改黑色背景还能玩出什么花样?
Keil5 UV4目录下的global.prop文件:从黑色主题到深度定制指南 如果你已经厌倦了Keil5默认的白色界面,或者对网上流传的"黑色背景修改教程"感到意犹未尽,那么这篇文章将带你深入探索global.prop这个配置文件的无限可能。作为Keil μ…...

华为光猫配置解密工具:网络运维的终极解决方案
华为光猫配置解密工具:网络运维的终极解决方案 【免费下载链接】HuaWei-Optical-Network-Terminal-Decoder 项目地址: https://gitcode.com/gh_mirrors/hu/HuaWei-Optical-Network-Terminal-Decoder 华为光猫配置解密工具是一款专为网络工程师和运维人员设计…...

CANN/asc-devkit int8转int16 API
asc_int82int16 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://gitcode…...

CANN/Ascend C逻辑异或API文档
LogicalXor 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://gitcode.com…...

基于OpenTelemetry的LLM应用可观测性实践:从黑盒到白盒的调试革命
1. 项目概述:当可观测性遇上大语言模型最近在折腾大语言模型应用时,我遇到了一个非常典型的痛点:应用跑起来了,但内部发生了什么,完全是个黑盒。Prompt 到底是怎么被处理的?模型调用的耗时都花在哪一步了&a…...

如何用SketchUp STL插件轻松实现3D打印:从设计到实物的完整指南
如何用SketchUp STL插件轻松实现3D打印:从设计到实物的完整指南 【免费下载链接】sketchup-stl A SketchUp Ruby Extension that adds STL (STereoLithography) file format import and export. 项目地址: https://gitcode.com/gh_mirrors/sk/sketchup-stl 你…...

告别龟速下载!用阿里云镜像和离线包5分钟搞定DBeaver所有JDBC驱动
告别龟速下载!用阿里云镜像和离线包5分钟搞定DBeaver所有JDBC驱动 每次打开DBeaver准备连接数据库,最让人抓狂的就是等待JDBC驱动下载的进度条。特别是在某些网络环境下,一个简单的MySQL驱动下载可能需要十几分钟,甚至直接失败。作…...

别再傻傻分不清!从Arduino到树莓派,一文搞懂舵机、步进、直流无刷和永磁同步电机的选型与控制
从Arduino到树莓派:四大电机选型实战指南 刚接触机器人制作时,面对琳琅满目的电机型号和参数,我曾在机械臂项目里错误选用了普通舵机导致精度不足,也因步进电机驱动配置不当烧毁过三个驱动器。这些教训让我意识到——电机选型不是…...

别再到处找了!用BigMap+geojson.io,5分钟搞定ECharts镇级地图的GeoJSON数据
5分钟极速获取镇级GeoJSON数据:BigMapgeojson.io与ECharts实战指南 当我们需要在数据可视化项目中展示乡镇级地理信息时,常常会遇到数据获取的难题。主流地图平台提供的API往往止步于区县级,而公开数据源又难以满足定制化需求。本文将介绍一套…...

PCL 方向向量约束的RANSAC拟合平面【2026最新版】
目录 一、算法概述 二、代码实现 三、结果展示 本文由CSDN点云侠原创,博客长期更新,本文最近一次更新时间为:2026年5月10日。 一、算法概述 SampleConsensusModelPerpendicularPlane使用额外的角度约束来定义三维平面分割的模型。平面必须垂直于用户指定的轴(setAxis),直到…...