【ROS】RViz、Gazebo和Navigation的关系
1、RViz
RViz(Robot Visualization,机器人可视化)是一个用于可视化机器人系统的开源工具,用于显示和调试机器人的传感器数据、状态信息和运动规划等。它是ROS(Robot Operating System)的一部分,是ROS中最常用的可视化工具之一。
RViz:“我们不生产数据只做数据的搬运工”
RViz提供了丰富的功能和可定制的界面,使用户能够以三维方式查看机器人模型、传感器数据和环境地图等。它支持多种类型的可视化对象,包括点云、网格模型、标记、路径、激光扫描和相机图像等。
以下是一些RViz的主要特点:
-
可视化机器人模型:RViz可以加载和显示机器人的三维模型,并根据实际的关节状态进行动态更新。这使得用户能够直观地了解机器人的外观和姿态。
-
显示传感器数据:RViz可以接收和显示来自机器人传感器(如激光雷达、摄像头、IMU等)的数据。用户可以实时查看和分析传感器数据,帮助理解机器人周围的环境。
-
生成导航地图:RViz可以通过接收来自SLAM(Simultaneous Localization and Mapping)或其他建图算法的数据,生成并显示机器人所在环境的二维或三维地图。
-
调试运动规划:RViz可以显示机器人的路径规划结果,并提供交互式界面来调试和优化运动规划算法。用户可以可视化虚拟路径、障碍物和碰撞检测等信息。
-
可定制性:RViz提供了丰富的配置选项,允许用户按照自己的需求自定义界面布局、可视化对象和颜色风格等。用户可以根据实际情况进行个性化设置,以满足特定的可视化需求
相关文章:

【ROS】RViz、Gazebo和Navigation的关系
1、RViz RViz(Robot Visualization,机器人可视化)是一个用于可视化机器人系统的开源工具,用于显示和调试机器人的传感器数据、状态信息和运动规划等。它是ROS(Robot Operating System)的一部分,是ROS中最常用的可视化工具之一。 RViz:“我们不生产数据只做数据的搬运…...
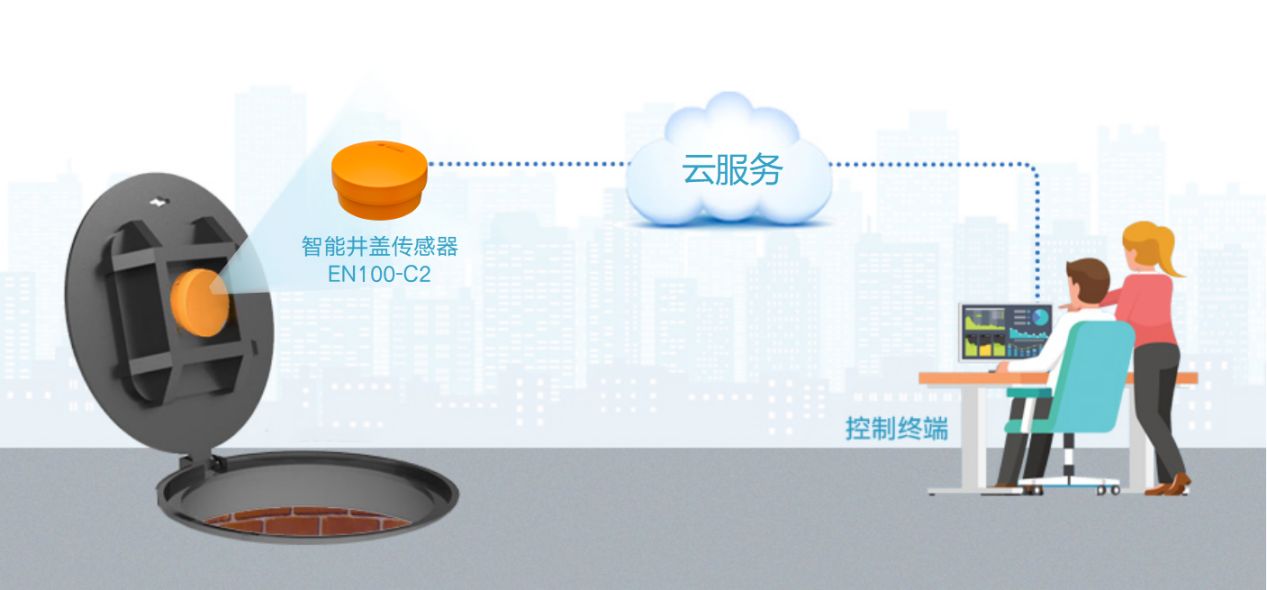
智能井盖:提升城市井盖安全管理效率
窨井盖作为城市基础设施的重要组成部分,其安全管理与城市的有序运行和群众的生产生活安全息息相关,体现城市管理和社会治理水平。当前,一些城市已经将智能化的窨井盖升级改造作为新城建的重要内容,推动窨井盖等“城市部件”配套建…...

JavaWeb开发-06-SpringBootWeb-MySQL
一.MySQL概述 1.安装、配置 官网下载地址:https://dev.mysql.com/downloads/mysql/ 2.数据模型 3.SQL简介 二.数据库设计-DDL 1.数据库 官网:http:// https://www.jetbrains.com/zh-cn/datagrip/ 2.表(创建、查询、修改、删除) #…...

十六、垃圾回收相关概念
目录 一、System.gc()的理解二、内存溢出和内存泄漏2、内存泄漏 三、Stop the World1、什么是 stop the word ? 四、垃圾回收的并行和并发1、并发和并发2、垃圾回收的并行和并发 五、安全点与安全区域1、什么是安全点?2、安全区域 六、强引用(不可回收&…...
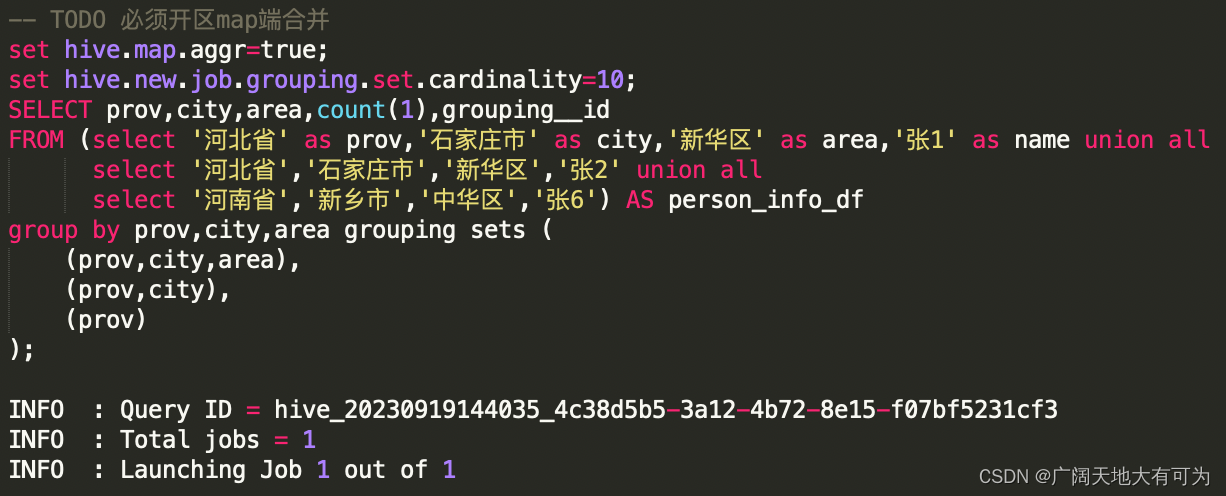
hive、spark、presto 中的增强聚合-grouping sets、rollup、cube
目录 1、什么是增强聚合和多维分析函数? 2、grouping sets - 指定维度组合 3、with rollup - 上卷维度组合 4、with cube - 全维度组合 5、Grouping__ID、grouping() 的使用场景 6、使用 增强聚合 会不会对查询性能有提升呢? 7、对grouping sets、…...

elasticsearch bulk 批量操作
1:bulk 是 elasticsearch 提供的一种批量增删改的操作API bulk 对 JSON串 有着严格的要求。每个JSON串 不能换行 ,只能放在同一行,同时, 相邻的JSON串之间必须要有换行 (Linux下是\n;Window下是\r\n&#…...

力扣11、 盛最多水的容器
方法一:双指针 考察: 贪心、数组、双指针 说明 本题是一道经典的面试题,最优的做法是使用「双指针」。如果读者第一次看到这题,不一定能想出双指针的做法。 复杂度分析 时间复杂度:O(N),双指针总计最多…...
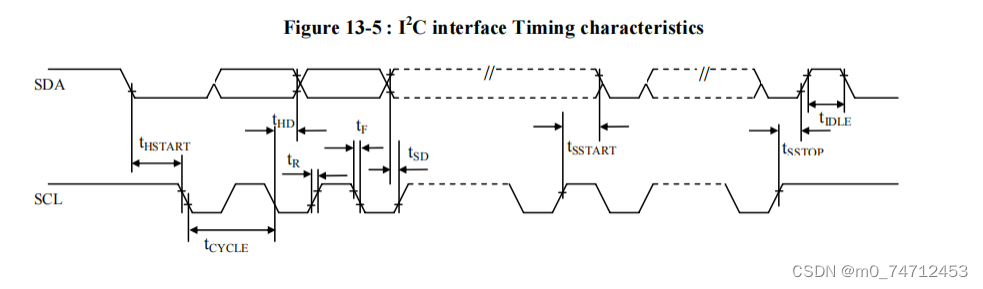
IIC协议详解
目录 1.IIC协议概述 2.IIC总线传输 3.IIC-51单片机应用 1.起始信号 2.终止信号 3.应答信号 4.数据发送 4.IIC-32单片机应用 用到的库函数: 1.IIC协议概述 IIC全称Inter-Integrated Circuit (集成电路总线)是由PHILIPS公司在80年代开发的两线式串行总线&…...

element ui-表头自定义提示框
版本 “element-ui”: “^2.15.5”,需求:鼠标悬浮到该列表头,显示提示框代码 <el-table:data"xxxx"><el-table-column label"序号" width"40" type"index" /><el-table-columnv-for"(ite…...
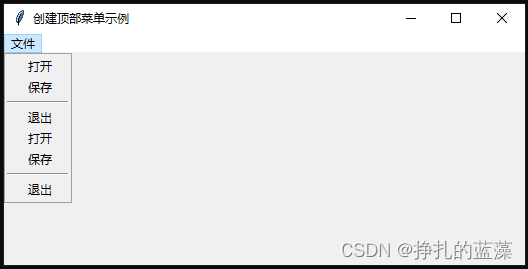
Python 图形化界面基础篇:创建顶部菜单
Python 图形化界面基础篇:创建顶部菜单 引言 Tkinter 库简介步骤1:导入 Tkinter 模块步骤2:创建 Tkinter 窗口步骤3:创建顶部菜单栏步骤4:处理菜单项的点击事件步骤5:启动 Tkinter 主事件循环 完整示例代码…...
java实现十大排序算法
文章目录 冒泡排序选择排序插入排序希尔排序归并排序快速排序堆排序桶排序基数排序计数排序验证各个排序的时间复杂度和空间复杂度 冒泡排序 冒泡排序(Bubble Sort)是一种简单的比较排序算法,它的基本思想是重复地交换相邻的两个元素&#x…...
Linux日志管理-logrotate(crontab定时任务、Ceph日志转储)
文章目录 一、logrotate概述二、logrotate基本用法三、logrotate运行机制logrotate参数 四、logrotate是怎么做到滚动日志时不影响程序正常的日志输出呢?Linux文件操作机制方案一方案二 五、logrotate实战--Ceph日志转储参考 一、logrotate概述 logrotate是一个用于…...
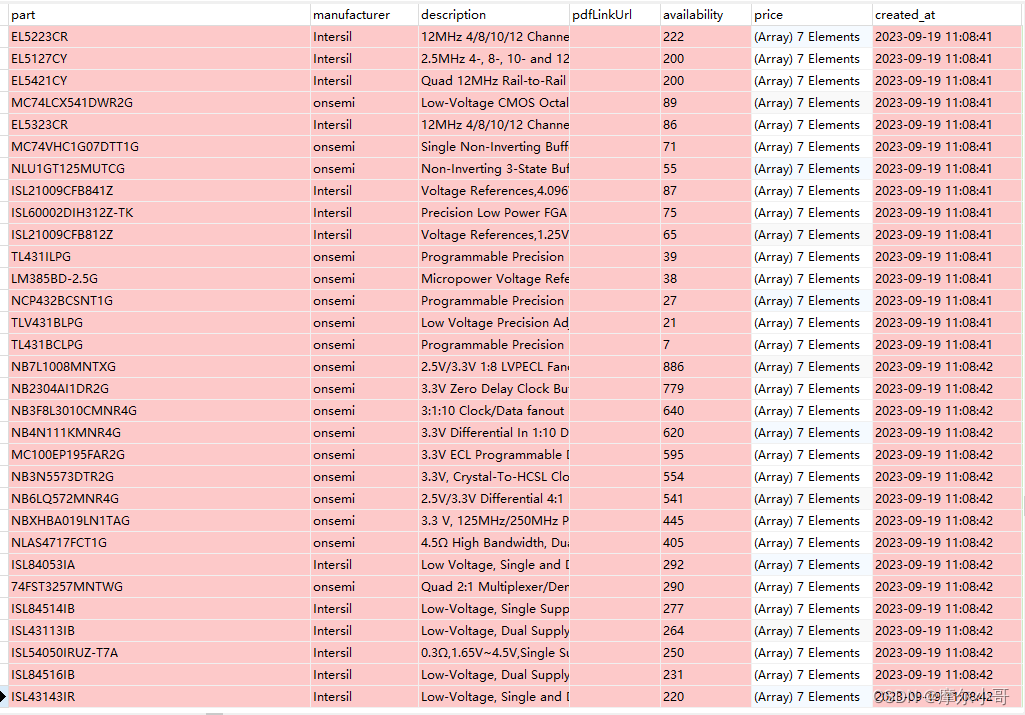
用PHP异步协程控制python爬虫脚本,实现多协程分布式爬取
背景 公司需要爬取指定网站的产品数据。但是个人对python的多进程和协程不是特别熟悉。所以,想通过php异步协程,发起爬取url请求控制python爬虫脚本,达到分布式爬取的效果。 准备 1.准备一个mongodb数据库用于存放爬取数据2.引入flask包&a…...
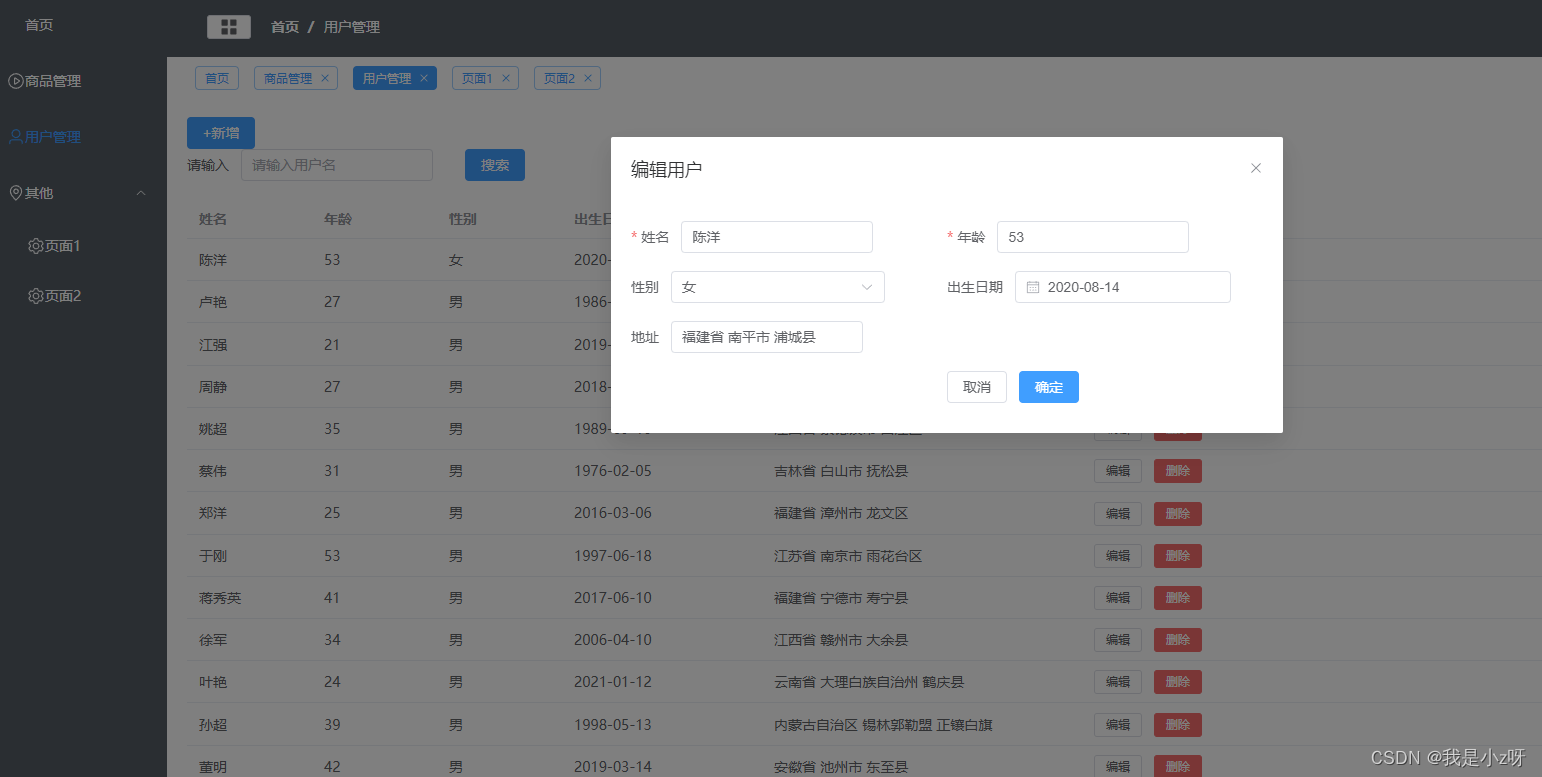
VUE3写后台管理(3)
VUE3写后台管理(3) 1.环境1.node2.vite3.Element-plus4.vue-router5.element icon6.less7.vuex8.vue-demi9.mockjs10.axios11.echarts 2.首页1.布局Main2.头部导航栏CommonHeader3.左侧菜单栏CommonLeft4.首页Home1.从后端获取数据显示到前端table的三种…...
无约束优化问题——共轭梯度法)
机器学习笔记之最优化理论与算法(十二)无约束优化问题——共轭梯度法
机器学习笔记之最优化理论与方法——共轭梯度法 引言回顾:共轭方向法的重要特征线性共轭梯度法共轭方向公式的证明过程 关于线搜索公式中参数的化简关于线搜索公式中步长部分的化简关于线搜索公式中共轭方向系数的化简参数化简的目的 非线性共轭梯度法(FR,PRP方法)关…...
JVM中的java同步互斥工具应用演示及设计分析
1.火车站售票系统仿真 某火车站目前正在出售火车票,共有50张票,而它有3个售票窗口同时售票,下面设计了一个程序模拟该火车站售票,通过实现Runnable接口实现(模拟网络延迟)。 伪代码: Ticket类…...

数据治理-数据质量
实现数据质量的前提就是数据本身是可靠和可信的。 导致数据质量低下的因素 组织缺乏对低质量数据影响的理解,缺乏规划、孤岛式系统设计、不一致的开发过程、不完整的文档、缺乏标准或缺乏治理等。 所有组织都会遇到与数据质量有关的问题。数据质量需要跨职能的承诺…...

[sqoop]hive3.1.2 hadoop3.1.1安装sqoop1.4.7
参考: Hadoop3.2.4Hive3.1.2sqoop1.4.7安装部署_hadoop sqoop安装_alicely07的博客-CSDN博客 一、安装 1、解压 tar -zxvf sqoop-1.4.7.bin__hadoop-2.6.0.tar.gz -C /home/data_warehouse/module mv sqoop-1.4.7.bin__hadoop-2.6.0 sqoop-1.4.72、配置文件 sqoop-env.s…...

js事件的详细介绍
11.事件 1.什么是事件 js属于事件驱动编程,把驱动,执行,调用通过一些交互,触发一些函数事件:发起-->执行绑定事件-->触发事件on 绑定 emit触发 off解绑2.事件分类 鼠标事件 点击事件 onclick 双击事件 ondblclick 按下事件 onmousedown 抬起事件 onmouseup 鼠标进…...
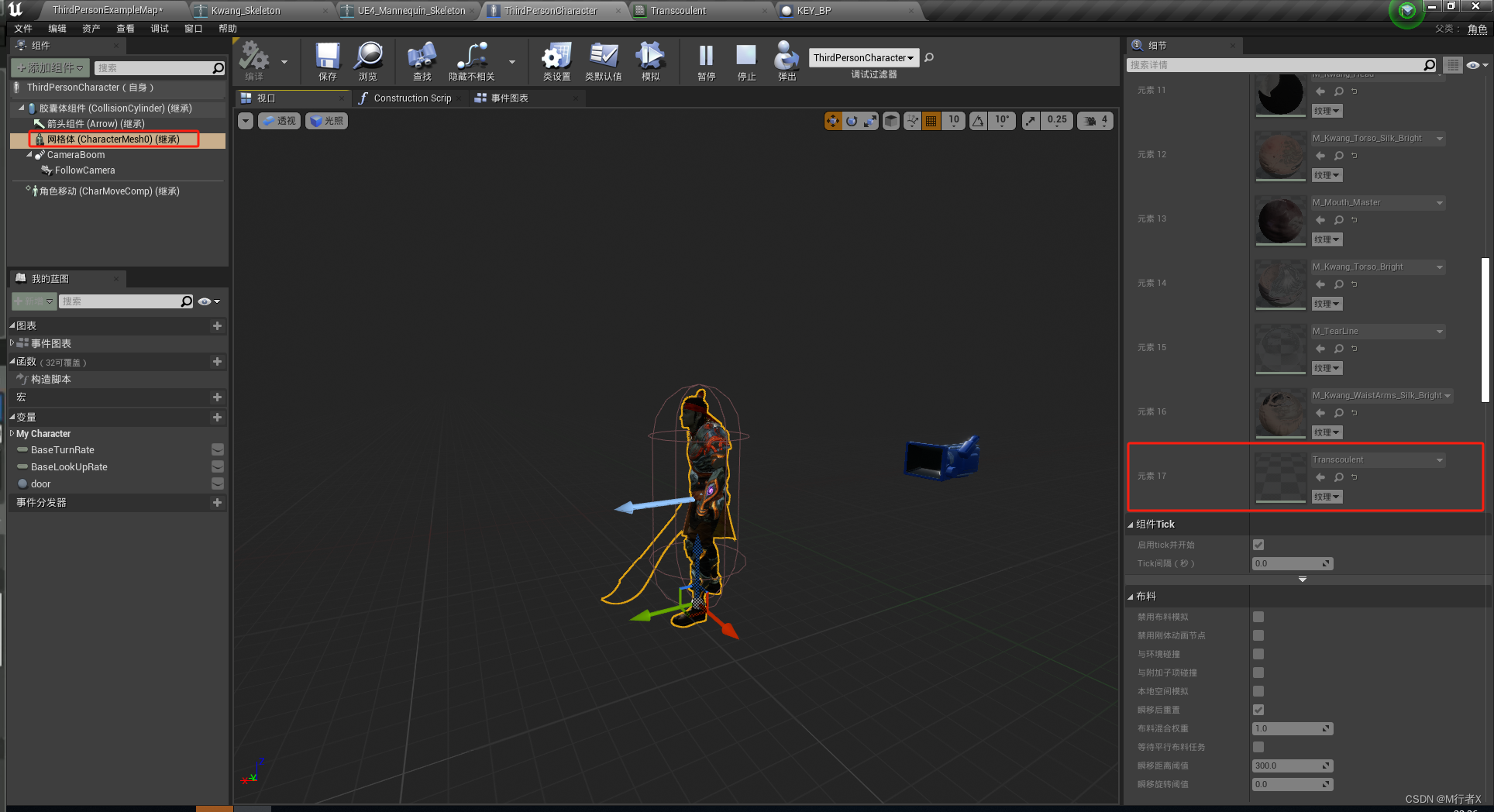
虚幻4学习笔记(12)操控导入的角色、动画蓝图、播放蒙太奇和打包、角色重定向
虚幻4学习笔记 操控导入的角色设置鼠标旋转关掉动态模糊 动画蓝图、播放蒙太奇和打包角色走路奔跑动画shift 奔跑F 跳舞移动打断 跳舞 打包角色重定向姿势调整解决跑步 腿分太开隐藏剑 B站UP谌嘉诚课程:https://www.bilibili.com/video/BV164411Y732 操控导入的角色…...

JVS-APS智能排产后如何配置移动端扫码报工
报工是在工厂中,确定人员/产线按照计划执行后,提交生产结果数据,那么在APS 完成计划排产后,如何能便捷的报工,下面我们有JVS快速开发平台做了一个报工的应用,实现 aps-mes 之间 任务下发与任务结果反馈的整…...
预测结果集)
Graphormer实际作品分享:10个典型分子(CCO/c1ccccc1/C=O等)预测结果集
Graphormer实际作品分享:10个典型分子预测结果集 1. 模型介绍与核心能力 Graphormer是一种基于纯Transformer架构的图神经网络,专门为分子图(原子-键结构)的全局结构建模与属性预测而设计。这个模型在OGB(Open Graph Benchmark)和PCQM4M等分子基准测试…...

Intv_AI_MK11嵌入式开发实战:在WSL2中部署AI模型并集成Keil5
Intv_AI_MK11嵌入式开发实战:在WSL2中部署AI模型并集成Keil5 1. 为什么选择WSL2进行嵌入式AI开发 对于嵌入式开发者来说,传统AI模型开发面临一个典型困境:训练环境通常基于Linux系统,而嵌入式开发工具链(如Keil MDK&…...

SpringBoot 3.2.0 项目里,如何优雅地引入 Flowable 7.1.0 工作流引擎?
SpringBoot 3.2.0 项目优雅集成 Flowable 7.1.0 工作流引擎实战指南 在微服务架构中引入工作流引擎,往往意味着需要在不破坏现有架构的前提下实现业务流程的自动化管理。本文将深入探讨如何在已具备MyBatis-Plus、Spring Cloud Alibaba等技术栈的SpringBoot 3.2.0项…...

像素剧本圣殿部署指南:Qwen2.5-14B-Instruct在生产环境中稳定运行的GPU显存优化技巧
像素剧本圣殿部署指南:Qwen2.5-14B-Instruct在生产环境中稳定运行的GPU显存优化技巧 1. 项目概述 像素剧本圣殿(Pixel Script Temple)是一款基于Qwen2.5-14B-Instruct大模型深度微调的专业剧本创作工具。它将先进的AI推理能力与独特的8-Bit…...

【QT】-- QT操作数据库
前言: Qt是C一个开发框架,具有跨平台特性。这篇是作者大二学习的时候做的笔记,有可能有错误,请各位批评指正。这篇记录QT操作数据库。欢迎大家收藏 关注,作者将会持续更新。 文章目录Qt 操作数据库QSqlDatabase数据库…...

CTFshow Misc挑战:从WinRAR到明文攻击的实战解析
1. 初识CTFshow Misc挑战:压缩包破解的奥秘 第一次接触CTFshow的Misc题目时,我被那个看似普通的压缩包难住了整整两天。那是个名为6.zip的文件,用360解压提示需要密码,这种场景在CTF比赛中实在太常见了。很多新手遇到这种情况会直…...

突发!国行苹果 AI 凌晨偷跑又紧急下线
3 月 31 日凌晨,大量升级 iOS 26.4 的国行 iPhone 16 及后续机型用户,突然发现设置里 “Siri” 变成 “Apple 智能与 Siri”,可下载 9.5GB 本地 AI 模型,解锁实时翻译、视觉智能、照片消除等全套功能。不过这场“惊喜”仅持续了数…...

SGMICRO圣邦微 SGM803B-JXN3G/TR SOT-23-3 监控和复位芯片
特性 适用于MAX803/MAX809/MAX810和ADM803/ADM809/ADM810的卓越升级版 高精度固定检测选项:3V、3.3V和5V 低供电电流:300nA(典型值)上电复位脉冲宽度:150毫秒(最小值) 复位输出选项: 开漏nRESET输出(SGM803B)推挽nRESET输出(SGM809B) . . 推挽复位输出(SGM810B)复位有效电压低至…...

【数据结构】树的定义、核心术语与关键性质全解析
在数据结构的世界里,树(Tree) 是一种极其重要的非线性结构,它完美模拟了自然界中树的层次关系,从文件系统、组织结构,到算法中的二叉搜索树、堆,再到 AI 中的决策树,树的身影无处不在…...