Opencv源码解析(2)算法
目录
一,直方图均衡
1,直方图统计
2,灰度变换
3,直方图均衡
二,可分离滤波器
1,可分离滤波器的工厂
2,ocvSepFilter、sepFilter2D
3,Sobel
三,相位相关法 phaseCorrelate
1,phaseCorrelate
2,汉宁窗
四,匹配器
1,纯虚类DescriptorMatcher
2,子类FlannBasedMatcher
3,knnMatch算法
一,直方图均衡
opencv-4.2.0\modules\imgproc\src\histogram.cpp 中的代码:
1,直方图统计
class EqualizeHistCalcHist_Invoker : public cv::ParallelLoopBody
{
public:enum {HIST_SZ = 256};EqualizeHistCalcHist_Invoker(cv::Mat& src, int* histogram, cv::Mutex* histogramLock): src_(src), globalHistogram_(histogram), histogramLock_(histogramLock){ }void operator()( const cv::Range& rowRange ) const CV_OVERRIDE{int localHistogram[HIST_SZ] = {0, };const size_t sstep = src_.step;int width = src_.cols;int height = rowRange.end - rowRange.start;if (src_.isContinuous()){width *= height;height = 1;}for (const uchar* ptr = src_.ptr<uchar>(rowRange.start); height--; ptr += sstep){int x = 0;for (; x <= width - 4; x += 4){int t0 = ptr[x], t1 = ptr[x+1];localHistogram[t0]++; localHistogram[t1]++;t0 = ptr[x+2]; t1 = ptr[x+3];localHistogram[t0]++; localHistogram[t1]++;}for (; x < width; ++x)localHistogram[ptr[x]]++;}cv::AutoLock lock(*histogramLock_);for( int i = 0; i < HIST_SZ; i++ )globalHistogram_[i] += localHistogram[i];}static bool isWorthParallel( const cv::Mat& src ){return ( src.total() >= 640*480 );}private:EqualizeHistCalcHist_Invoker& operator=(const EqualizeHistCalcHist_Invoker&);cv::Mat& src_;int* globalHistogram_;cv::Mutex* histogramLock_;
};类继承了ParallelLoopBody,可以做并行加速。
灰度级HIST_SZ = 256
构造函数保存三个参数。
仿函数是统计直方图。
isWorthParallel函数是判断是否启用并行加速。
2,灰度变换
class EqualizeHistLut_Invoker : public cv::ParallelLoopBody
{
public:EqualizeHistLut_Invoker( cv::Mat& src, cv::Mat& dst, int* lut ): src_(src),dst_(dst),lut_(lut){ }void operator()( const cv::Range& rowRange ) const CV_OVERRIDE{const size_t sstep = src_.step;const size_t dstep = dst_.step;int width = src_.cols;int height = rowRange.end - rowRange.start;int* lut = lut_;if (src_.isContinuous() && dst_.isContinuous()){width *= height;height = 1;}const uchar* sptr = src_.ptr<uchar>(rowRange.start);uchar* dptr = dst_.ptr<uchar>(rowRange.start);for (; height--; sptr += sstep, dptr += dstep){int x = 0;for (; x <= width - 4; x += 4){int v0 = sptr[x];int v1 = sptr[x+1];int x0 = lut[v0];int x1 = lut[v1];dptr[x] = (uchar)x0;dptr[x+1] = (uchar)x1;v0 = sptr[x+2];v1 = sptr[x+3];x0 = lut[v0];x1 = lut[v1];dptr[x+2] = (uchar)x0;dptr[x+3] = (uchar)x1;}for (; x < width; ++x)dptr[x] = (uchar)lut[sptr[x]];}}static bool isWorthParallel( const cv::Mat& src ){return ( src.total() >= 640*480 );}private:EqualizeHistLut_Invoker& operator=(const EqualizeHistLut_Invoker&);cv::Mat& src_;cv::Mat& dst_;int* lut_;
};构造函数保存三个参数。
仿函数是根据灰度变换表lut,把原图变成目标图。
3,直方图均衡
void cv::equalizeHist( InputArray _src, OutputArray _dst )
{CV_INSTRUMENT_REGION();CV_Assert( _src.type() == CV_8UC1 );if (_src.empty())return;CV_OCL_RUN(_src.dims() <= 2 && _dst.isUMat(),ocl_equalizeHist(_src, _dst))Mat src = _src.getMat();_dst.create( src.size(), src.type() );Mat dst = _dst.getMat();CV_OVX_RUN(!ovx::skipSmallImages<VX_KERNEL_EQUALIZE_HISTOGRAM>(src.cols, src.rows),openvx_equalize_hist(src, dst))Mutex histogramLockInstance;const int hist_sz = EqualizeHistCalcHist_Invoker::HIST_SZ;int hist[hist_sz] = {0,};int lut[hist_sz];EqualizeHistCalcHist_Invoker calcBody(src, hist, &histogramLockInstance);EqualizeHistLut_Invoker lutBody(src, dst, lut);cv::Range heightRange(0, src.rows);if(EqualizeHistCalcHist_Invoker::isWorthParallel(src))parallel_for_(heightRange, calcBody);elsecalcBody(heightRange);int i = 0;while (!hist[i]) ++i;int total = (int)src.total();if (hist[i] == total){dst.setTo(i);return;}float scale = (hist_sz - 1.f)/(total - hist[i]);int sum = 0;for (lut[i++] = 0; i < hist_sz; ++i){sum += hist[i];lut[i] = saturate_cast<uchar>(sum * scale);}if(EqualizeHistLut_Invoker::isWorthParallel(src))parallel_for_(heightRange, lutBody);elselutBody(heightRange);
}先是直方图统计,然后是对于纯色图片的特殊处理(直方图均衡结果等于原图),再是计算灰度变换表lut,最后把原图变成目标图。
二,可分离滤波器
1,可分离滤波器的工厂
Ptr<FilterEngine> createSeparableLinearFilter(int _srcType, int _dstType,InputArray __rowKernel, InputArray __columnKernel,Point _anchor, double _delta,int _rowBorderType, int _columnBorderType,const Scalar& _borderValue)
{Mat _rowKernel = __rowKernel.getMat(), _columnKernel = __columnKernel.getMat();_srcType = CV_MAT_TYPE(_srcType);_dstType = CV_MAT_TYPE(_dstType);int sdepth = CV_MAT_DEPTH(_srcType), ddepth = CV_MAT_DEPTH(_dstType);int cn = CV_MAT_CN(_srcType);CV_Assert( cn == CV_MAT_CN(_dstType) );int rsize = _rowKernel.rows + _rowKernel.cols - 1;int csize = _columnKernel.rows + _columnKernel.cols - 1;if( _anchor.x < 0 )_anchor.x = rsize/2;if( _anchor.y < 0 )_anchor.y = csize/2;int rtype = getKernelType(_rowKernel,_rowKernel.rows == 1 ? Point(_anchor.x, 0) : Point(0, _anchor.x));int ctype = getKernelType(_columnKernel,_columnKernel.rows == 1 ? Point(_anchor.y, 0) : Point(0, _anchor.y));Mat rowKernel, columnKernel;bool isBitExactMode = false;int bdepth = std::max(CV_32F,std::max(sdepth, ddepth));int bits = 0;if( sdepth == CV_8U &&((rtype == KERNEL_SMOOTH+KERNEL_SYMMETRICAL &&ctype == KERNEL_SMOOTH+KERNEL_SYMMETRICAL &&ddepth == CV_8U) ||((rtype & (KERNEL_SYMMETRICAL+KERNEL_ASYMMETRICAL)) &&(ctype & (KERNEL_SYMMETRICAL+KERNEL_ASYMMETRICAL)) &&(rtype & ctype & KERNEL_INTEGER) &&ddepth == CV_16S)) ){int bits_ = ddepth == CV_8U ? 8 : 0;bool isValidBitExactRowKernel = createBitExactKernel_32S(_rowKernel, rowKernel, bits_);bool isValidBitExactColumnKernel = createBitExactKernel_32S(_columnKernel, columnKernel, bits_);if (!isValidBitExactRowKernel){CV_LOG_DEBUG(NULL, "createSeparableLinearFilter: bit-exact row-kernel can't be applied: ksize=" << _rowKernel.total());}else if (!isValidBitExactColumnKernel){CV_LOG_DEBUG(NULL, "createSeparableLinearFilter: bit-exact column-kernel can't be applied: ksize=" << _columnKernel.total());}else{bdepth = CV_32S;bits = bits_;bits *= 2;_delta *= (1 << bits);isBitExactMode = true;}}if (!isBitExactMode){if( _rowKernel.type() != bdepth )_rowKernel.convertTo( rowKernel, bdepth );elserowKernel = _rowKernel;if( _columnKernel.type() != bdepth )_columnKernel.convertTo( columnKernel, bdepth );elsecolumnKernel = _columnKernel;}int _bufType = CV_MAKETYPE(bdepth, cn);Ptr<BaseRowFilter> _rowFilter = getLinearRowFilter(_srcType, _bufType, rowKernel, _anchor.x, rtype);Ptr<BaseColumnFilter> _columnFilter = getLinearColumnFilter(_bufType, _dstType, columnKernel, _anchor.y, ctype, _delta, bits );return Ptr<FilterEngine>( new FilterEngine(Ptr<BaseFilter>(), _rowFilter, _columnFilter,_srcType, _dstType, _bufType, _rowBorderType, _columnBorderType, _borderValue ));
}前2个参数是输入输出图像的格式,接下来2个参数是核分离出来的行向量和列向量。
函数返回一个FilterEngine对象,其中保存了一些需要的信息。
2,ocvSepFilter、sepFilter2D
static void ocvSepFilter(int stype, int dtype, int ktype,uchar* src_data, size_t src_step, uchar* dst_data, size_t dst_step,int width, int height, int full_width, int full_height,int offset_x, int offset_y,uchar * kernelx_data, int kernelx_len,uchar * kernely_data, int kernely_len,int anchor_x, int anchor_y, double delta, int borderType)
{Mat kernelX(Size(kernelx_len, 1), ktype, kernelx_data);Mat kernelY(Size(kernely_len, 1), ktype, kernely_data);Ptr<FilterEngine> f = createSeparableLinearFilter(stype, dtype, kernelX, kernelY,Point(anchor_x, anchor_y),delta, borderType & ~BORDER_ISOLATED);Mat src(Size(width, height), stype, src_data, src_step);Mat dst(Size(width, height), dtype, dst_data, dst_step);f->apply(src, dst, Size(full_width, full_height), Point(offset_x, offset_y));
};先创建FilterEngine对象,然后调用它的apply方法进行滤波。
void sepFilter2D(int stype, int dtype, int ktype,uchar* src_data, size_t src_step, uchar* dst_data, size_t dst_step,int width, int height, int full_width, int full_height,int offset_x, int offset_y,uchar * kernelx_data, int kernelx_len,uchar * kernely_data, int kernely_len,int anchor_x, int anchor_y, double delta, int borderType)
{bool res = replacementSepFilter(stype, dtype, ktype,src_data, src_step, dst_data, dst_step,width, height, full_width, full_height,offset_x, offset_y,kernelx_data, kernelx_len,kernely_data, kernely_len,anchor_x, anchor_y, delta, borderType);if (res)return;ocvSepFilter(stype, dtype, ktype,src_data, src_step, dst_data, dst_step,width, height, full_width, full_height,offset_x, offset_y,kernelx_data, kernelx_len,kernely_data, kernely_len,anchor_x, anchor_y, delta, borderType);
}调用ocvSepFilter
3,Sobel
void cv::Sobel( InputArray _src, OutputArray _dst, int ddepth, int dx, int dy,int ksize, double scale, double delta, int borderType )
{CV_INSTRUMENT_REGION();int stype = _src.type(), sdepth = CV_MAT_DEPTH(stype), cn = CV_MAT_CN(stype);if (ddepth < 0)ddepth = sdepth;int dtype = CV_MAKE_TYPE(ddepth, cn);_dst.create( _src.size(), dtype );int ktype = std::max(CV_32F, std::max(ddepth, sdepth));Mat kx, ky;getDerivKernels( kx, ky, dx, dy, ksize, false, ktype );if( scale != 1 ){// usually the smoothing part is the slowest to compute,// so try to scale it instead of the faster differentiating partif( dx == 0 )kx *= scale;elseky *= scale;}CV_OCL_RUN(ocl::isOpenCLActivated() && _dst.isUMat() && _src.dims() <= 2 && ksize == 3 &&(size_t)_src.rows() > ky.total() && (size_t)_src.cols() > kx.total(),ocl_sepFilter3x3_8UC1(_src, _dst, ddepth, kx, ky, delta, borderType));CV_OCL_RUN(ocl::isOpenCLActivated() && _dst.isUMat() && _src.dims() <= 2 && (size_t)_src.rows() > kx.total() && (size_t)_src.cols() > kx.total(),ocl_sepFilter2D(_src, _dst, ddepth, kx, ky, Point(-1, -1), delta, borderType))Mat src = _src.getMat();Mat dst = _dst.getMat();Point ofs;Size wsz(src.cols, src.rows);if(!(borderType & BORDER_ISOLATED))src.locateROI( wsz, ofs );CALL_HAL(sobel, cv_hal_sobel, src.ptr(), src.step, dst.ptr(), dst.step, src.cols, src.rows, sdepth, ddepth, cn,ofs.x, ofs.y, wsz.width - src.cols - ofs.x, wsz.height - src.rows - ofs.y, dx, dy, ksize, scale, delta, borderType&~BORDER_ISOLATED);CV_OVX_RUN(true,openvx_sobel(src, dst, dx, dy, ksize, scale, delta, borderType))//CV_IPP_RUN_FAST(ipp_Deriv(src, dst, dx, dy, ksize, scale, delta, borderType));sepFilter2D(src, dst, ddepth, kx, ky, Point(-1, -1), delta, borderType );
}前三个参数是输入图像、输出图像及深度,接下来2个参数是微分的阶。
三,相位相关法 phaseCorrelate
phaseCorrelate函数是利用相位相关法,给两张图片做频域配准。
1,phaseCorrelate
modules\imgproc\src\phasecorr.cpp
cv::Point2d cv::phaseCorrelate(InputArray _src1, InputArray _src2, InputArray _window, double* response)
{CV_INSTRUMENT_REGION();Mat src1 = _src1.getMat();Mat src2 = _src2.getMat();Mat window = _window.getMat();CV_Assert( src1.type() == src2.type());CV_Assert( src1.type() == CV_32FC1 || src1.type() == CV_64FC1 );CV_Assert( src1.size == src2.size);if(!window.empty()){CV_Assert( src1.type() == window.type());CV_Assert( src1.size == window.size);}int M = getOptimalDFTSize(src1.rows);int N = getOptimalDFTSize(src1.cols);Mat padded1, padded2, paddedWin;if(M != src1.rows || N != src1.cols){copyMakeBorder(src1, padded1, 0, M - src1.rows, 0, N - src1.cols, BORDER_CONSTANT, Scalar::all(0));copyMakeBorder(src2, padded2, 0, M - src2.rows, 0, N - src2.cols, BORDER_CONSTANT, Scalar::all(0));if(!window.empty()){copyMakeBorder(window, paddedWin, 0, M - window.rows, 0, N - window.cols, BORDER_CONSTANT, Scalar::all(0));}}else{padded1 = src1;padded2 = src2;paddedWin = window;}Mat FFT1, FFT2, P, Pm, C;// perform window multiplication if availableif(!paddedWin.empty()){// apply window to both images before proceeding...multiply(paddedWin, padded1, padded1);multiply(paddedWin, padded2, padded2);}// execute phase correlation equation// Reference: http://en.wikipedia.org/wiki/Phase_correlationdft(padded1, FFT1, DFT_REAL_OUTPUT);dft(padded2, FFT2, DFT_REAL_OUTPUT);mulSpectrums(FFT1, FFT2, P, 0, true);magSpectrums(P, Pm);divSpectrums(P, Pm, C, 0, false); // FF* / |FF*| (phase correlation equation completed here...)idft(C, C); // gives us the nice peak shift location...fftShift(C); // shift the energy to the center of the frame.// locate the highest peakPoint peakLoc;minMaxLoc(C, NULL, NULL, NULL, &peakLoc);// get the phase shift with sub-pixel accuracy, 5x5 window seems about right here...Point2d t;t = weightedCentroid(C, peakLoc, Size(5, 5), response);// max response is M*N (not exactly, might be slightly larger due to rounding errors)if(response)*response /= M*N;// adjust shift relative to image center...Point2d center((double)padded1.cols / 2.0, (double)padded1.rows / 2.0);return (center - t);
}前两个参数是传2张图片,第三个是应用窗函数去除图像的边界效应,文档中推荐使用汉宁窗。
2,汉宁窗
void cv::createHanningWindow(OutputArray _dst, cv::Size winSize, int type)
{CV_INSTRUMENT_REGION();CV_Assert( type == CV_32FC1 || type == CV_64FC1 );CV_Assert( winSize.width > 1 && winSize.height > 1 );_dst.create(winSize, type);Mat dst = _dst.getMat();int rows = dst.rows, cols = dst.cols;AutoBuffer<double> _wc(cols);double* const wc = _wc.data();double coeff0 = 2.0 * CV_PI / (double)(cols - 1), coeff1 = 2.0f * CV_PI / (double)(rows - 1);for(int j = 0; j < cols; j++)wc[j] = 0.5 * (1.0 - cos(coeff0 * j));if(dst.depth() == CV_32F){for(int i = 0; i < rows; i++){float* dstData = dst.ptr<float>(i);double wr = 0.5 * (1.0 - cos(coeff1 * i));for(int j = 0; j < cols; j++)dstData[j] = (float)(wr * wc[j]);}}else{for(int i = 0; i < rows; i++){double* dstData = dst.ptr<double>(i);double wr = 0.5 * (1.0 - cos(coeff1 * i));for(int j = 0; j < cols; j++)dstData[j] = wr * wc[j];}}// perform batch sqrt for SSE performance gainscv::sqrt(dst, dst);
}
四,匹配器
opencv-4.2.0\modules\features2d\src\matchers.cpp中的代码:
1,纯虚类DescriptorMatcher
内含3种匹配算法:
class CV_EXPORTS_W DescriptorMatcher : public Algorithm
{
public:
CV_WRAP void match( InputArray queryDescriptors, InputArray trainDescriptors,CV_OUT std::vector<DMatch>& matches, InputArray mask=noArray() ) const;
CV_WRAP void knnMatch( InputArray queryDescriptors, InputArray trainDescriptors,CV_OUT std::vector<std::vector<DMatch> >& matches, int k,InputArray mask=noArray(), bool compactResult=false ) const;
CV_WRAP void radiusMatch( InputArray queryDescriptors, InputArray trainDescriptors,CV_OUT std::vector<std::vector<DMatch> >& matches, float maxDistance,InputArray mask=noArray(), bool compactResult=false ) const;
CV_WRAP void match( InputArray queryDescriptors, CV_OUT std::vector<DMatch>& matches,InputArrayOfArrays masks=noArray() );
CV_WRAP void knnMatch( InputArray queryDescriptors, CV_OUT std::vector<std::vector<DMatch> >& matches, int k,InputArrayOfArrays masks=noArray(), bool compactResult=false );
CV_WRAP void radiusMatch( InputArray queryDescriptors, CV_OUT std::vector<std::vector<DMatch> >& matches, float maxDistance,InputArrayOfArrays masks=noArray(), bool compactResult=false );
。。。。。。
};DescriptorMatcher内含纯虚函数clone()
match里面还是调knnMatch,所以实际上是knnMatch和radiusMatch两种算法。
2,子类FlannBasedMatcher
继承DescriptorMatcher
class CV_EXPORTS_W FlannBasedMatcher : public DescriptorMatcher
{
public:CV_WRAP FlannBasedMatcher( const Ptr<flann::IndexParams>& indexParams=makePtr<flann::KDTreeIndexParams>(),const Ptr<flann::SearchParams>& searchParams=makePtr<flann::SearchParams>() );
......
};(1)clone
创建一个实例
(2)算法
算法没有重载,也没有重写,直接是父类的函数。
3,knnMatch算法
void DescriptorMatcher::knnMatch( InputArray queryDescriptors, InputArray trainDescriptors,std::vector<std::vector<DMatch> >& matches, int knn,InputArray mask, bool compactResult ) const
{CV_INSTRUMENT_REGION();Ptr<DescriptorMatcher> tempMatcher = clone(true);tempMatcher->add(trainDescriptors);tempMatcher->knnMatch( queryDescriptors, matches, knn, std::vector<Mat>(1, mask.getMat()), compactResult );
}
void DescriptorMatcher::knnMatch( InputArray queryDescriptors, std::vector<std::vector<DMatch> >& matches, int knn,InputArrayOfArrays masks, bool compactResult )
{CV_INSTRUMENT_REGION();if( empty() || queryDescriptors.empty() )return;CV_Assert( knn > 0 );checkMasks( masks, queryDescriptors.size().height );train();knnMatchImpl( queryDescriptors, matches, knn, masks, compactResult );
}核心功能用impl技术存在knnMatchImpl里面了。
相关文章:
算法)
Opencv源码解析(2)算法
目录 一,直方图均衡 1,直方图统计 2,灰度变换 3,直方图均衡 二,可分离滤波器 1,可分离滤波器的工厂 2,ocvSepFilter、sepFilter2D 3,Sobel 三,相位相关法 phase…...
让Mac菜单栏变得更加美观整洁——Bartender 5
Bartender 5是一款Mac电脑上的菜单栏图标管理软件,能够帮助您把菜单栏上的图标整理得更加美观、整洁和易于使用。如果您的菜单栏上充斥着许多图标,导致视觉上很不舒适和疲劳,那么Bartender 5就是解决这一问题的最佳选择! Bartend…...

服务器迁移:无缝过渡指南
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

安卓开发中ViewBinding的使用
在安卓开发中,ViewBing 的作用就是简化 findViewById() 代码的写法。 看看下面的替换: etbinding.text //etfindViewById(R.id.text) 下面就看看怎么用的, 首先,打开app模块的build.gradle,然后添加如下代码&…...
【初阶数据结构】树(tree)的基本概念——C语言
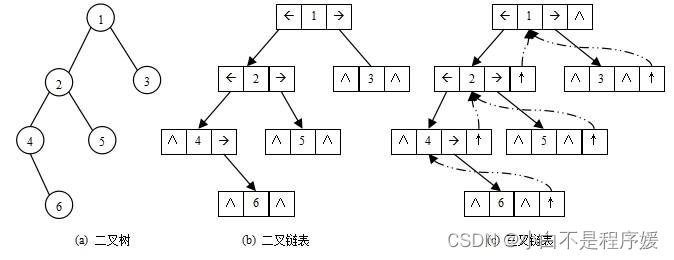
目录 一、树(tree) 1.1树的概念及结构 1.2树的相关概念 1.3树的表示 1.4树在实际中的运用(表示文件系统的目录树结构) 二、二叉树的概念及结构 2.1二叉树的概念 2.2现实中真正的二叉树 2.3特殊的二叉树 2.4二叉树的性质…...
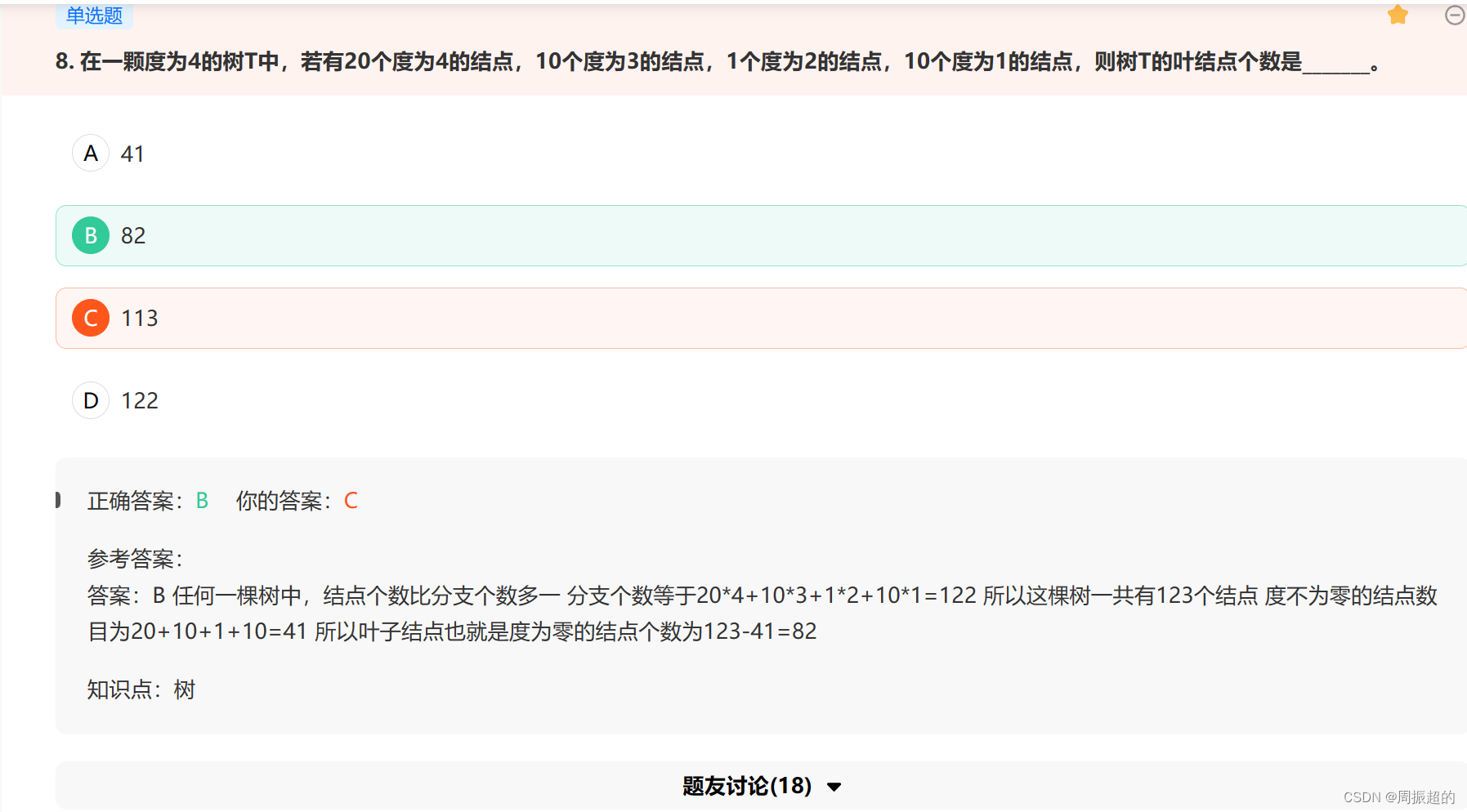
二叉树知识点
1.霍夫曼编码 这位作者写的很清楚 哈夫曼编码详解——图解真能看了秒懂_已知字符集abcdef,若各字符出现的次数_Young_IT的博客-CSDN博客 2.满二叉树与完全二叉树 满二叉树是指每层数量是pow(2,n-1)个节点,总节点数是pow(2,n)-1; 而完全二叉树是指最后一层不一定…...
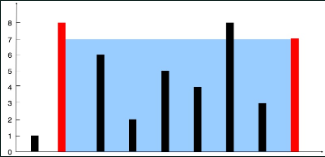
Day69:283. 移动零、11. 盛最多水的容器、42. 接雨水
283. 移动零 leetcode链接:https://leetcode.cn/problems/move-zeroes/ 给定一个数组 nums,编写一个函数将所有 0 移动到数组的末尾,同时保持非零元素的相对顺序。请注意 ,必须在不复制数组的情况下原地对数组进行操作。示例 1:…...

tensorrt的安装和使用
安装 提前安装好 CUDA 和 CUDNN,登录 NVIDIA 官方网站下载和主机 CUDA 版本适配的 TensorRT 压缩包即可。 以 CUDA 版本是 10.2 为例,选择适配 CUDA 10.2 的 tar 包,然后执行类似如下的命令安装并测试: #安装c版本 cd /the/pat…...
电压放大器在电子测试中的应用有哪些方面
电压放大器是一种常见的电子设备,广泛应用于各种测试和测量应用中。以下是电压放大器在电子测试中的几个主要方面应用的简要介绍。 信号采集与处理:电压放大器通常用于信号采集和处理,在测试过程中将低电平信号放大到适合进一步处理或分析的水…...

39.地址算术运算
如果p是一个指向数组中某个元素的指针,那么p将会对p进行自增运算并指向下一个元素,而pi将对p进行加i的增量运算,使其指向指针p当前所指向的元素之后的第i个元素。这类运算时指针或地址算术运算中最简单的形式。 allocbuf中的空间使用状况也是…...

没有外网的麒麟系统上搭建GitLab服务并且无需客户端账号密码验证
要在没有外网的麒麟系统上搭建GitLab服务并且无需客户端账号密码验证,可以按照以下步骤进行操作: 安装必要的依赖包和软件 sudo yum install curl policycoreutils-python openssh-server openssh-clients sudo systemctl enable sshd sudo systemctl …...

微服务生态系统:使用Spring Cloud构建分布式系统
文章目录 什么是微服务?为什么选择Spring Cloud?Spring Cloud的关键组件示例:构建一个简单的微服务步骤1:创建Spring Boot项目步骤2:配置Eureka服务发现步骤3:创建REST控制器步骤4:运行项目步骤…...

DIY 一个汽车方向盘游戏外设(MMOS OSW DIY)
OSW-MMOS直驱方向盘DIY过程记录 - 简书 (jianshu.com) DIY 一个汽车方向盘游戏外设(MMOS OSW DIY) 首先讲一下这个直驱系统大概的框架,首先是电脑,电脑里装MMOS的软件(这个软件国内高手把它汉化了的),电脑通过USB线&a…...

校园网络技术需求分析
路由技术: 路由协议工作在 OSI 参考模型的第 3 层,因此它的作用主要是在通信 子网间路由数据包。路由器具有在网络中传递数据时选择最佳路径的能力。 除了可以完成主要的路由任务,利用访问控制列表(Access Control List&#x…...
计算机网络(二):TCP篇
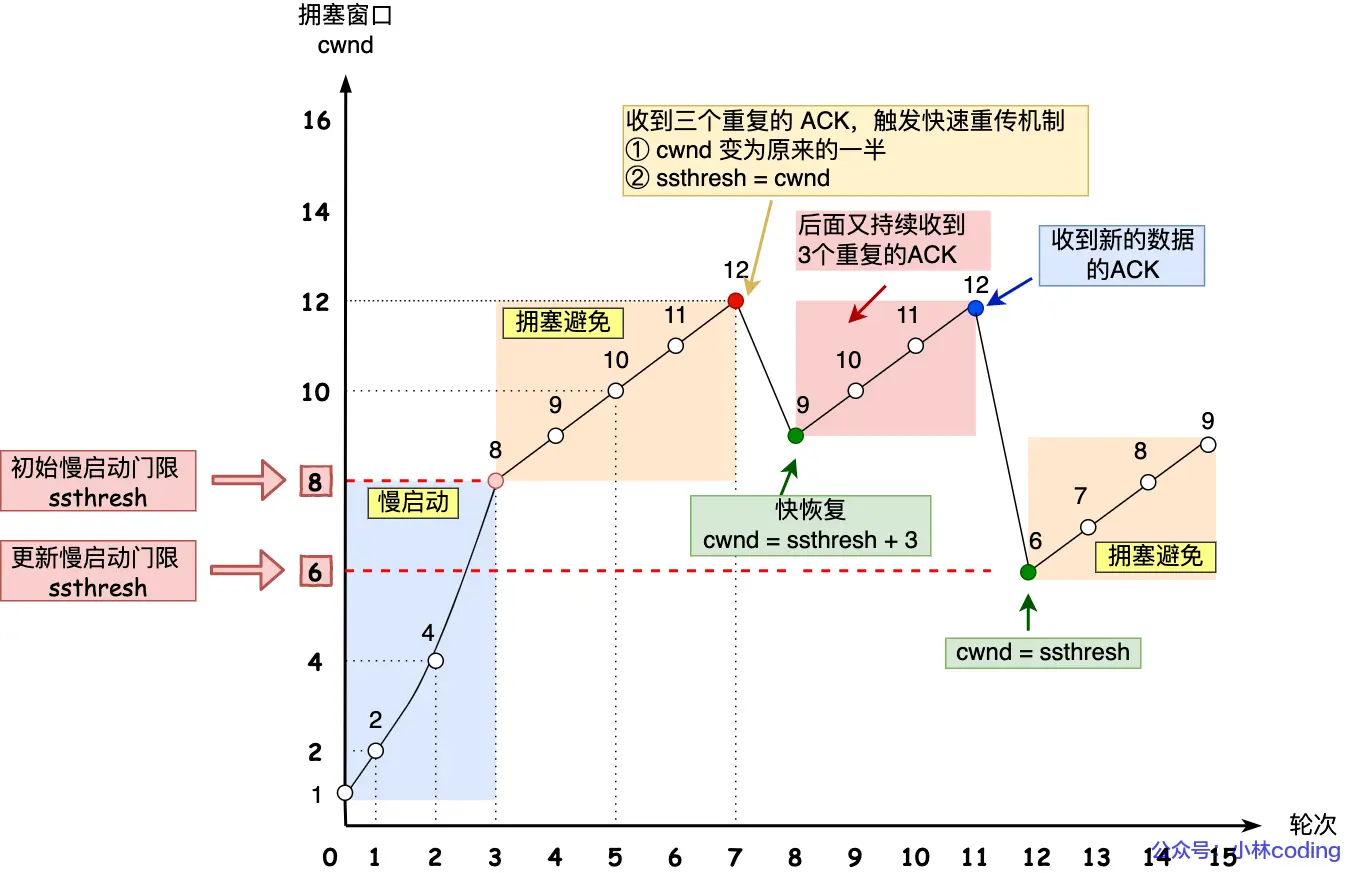
文章目录 1. TCP头部包含哪些内容?2. 为什么需要 TCP 协议? TCP 工作在哪一层?3. 什么是 TCP ?4. 什么是 TCP 连接?5. 如何唯一确定一个 TCP 连接呢?6. UDP头部大小是多少?包含哪些内容…...

测试登录界面:Python
import unittest from selenium import webdriver class LoginTest(unittest.TestCase): def setUp(self): self.driver webdriver.Chrome() def test_login(self): # 打开登录页面 self.driver.get("http://example.com/login") # 输入用户名和密码 user…...

Rust踩雷笔记(7)——两个链表题例子初识裸指针
目录 leetcode 234leetcode 19 leetcode 234 题目在这https://leetcode.cn/problems/palindrome-linked-list/,leetcode 234的回文链表,思路很简单,就是fast和slow两个指针,fast一次移动两个、slow一次一个,最后slow指…...

用什么命令看Linux系统的体系架构
要查看Linux系统的体系架构,可以使用uname命令。在终端中运行以下命令: uname -m该命令将返回系统的体系架构,例如x86_64表示64位系统,i686表示32位系统。 uname 使用方法 uname命令用于获取操作系统的相关信息。它可以用于显示…...

消息中间件大揭秘:选择之前你必须知道的关键信息
Hello大家好!我是小米,很高兴再次和大家见面!今天的话题非常精彩,我们将深入探讨消息中间件,并了解一些常见的消息队列:RabbitMQ、RocketMQ、Kafka以及Redis。如果你正在准备面试,或者只是对这些…...

【Unity基础】4.动画Animation
【Unity基础】4.动画Animation 大家好,我是Lampard~~ 欢迎来到Unity基础系列博客,所学知识来自B站阿发老师~感谢 (一)Unity动画编辑器 (1)Animation组件 这一张我们要学习如何在unity编辑器中&…...

基于数据科学的宠物性格分析:从行为量化到性格画像的工程实践
1. 项目概述与核心价值最近在逛GitHub的时候,发现了一个挺有意思的项目,叫petsonality。光看名字,你大概就能猜到它和“宠物”(Pets)以及“性格”(Personality)有关。没错,这是一个通…...

UPS 蓄电池在线监控系统是什么?工业 UPS 电源有必要安装吗?
在机房、工业生产、医疗设备等依赖 UPS 不间断电源的场景中,蓄电池往往被视为设备的 “心脏”。很多用户配置了优质 UPS 电源,却忽略了对蓄电池的实时管理,等到突发停电才发现电池亏电、失效,导致 UPS 无法正常供电,引…...

对比直接购买与使用Taotoken Token Plan套餐的成本控制体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接购买与使用Taotoken Token Plan套餐的成本控制体验 1. 引言:个人开发者的成本困惑 作为个人开发者࿰…...

【附C源码】循环队列的C语言实现
【附C源码】循环队列的C语言实现 队列作为基础数据结构之一,在操作系统调度、消息传递、广度优先搜索等场景中均有广泛应用。本文将探讨一种基于循环数组的队列实现方案,该方案在内存利用率和操作效率之间取得了较好的平衡。 设计思路 传统数组实现队列时…...

TV Bro电视浏览器革命性突破:让Android电视变身智能上网终端
TV Bro电视浏览器革命性突破:让Android电视变身智能上网终端 【免费下载链接】tv-bro Simple web browser for android optimized to use with TV remote 项目地址: https://gitcode.com/gh_mirrors/tv/tv-bro 您是否曾在大屏幕电视前感到手足无措࿱…...

你还在用自然语言写MJ提示词?专业级结构化提示词已进入Token级编排时代:详解::权重、--no冲突域、[]嵌套层级与多模态对齐原理
更多请点击: https://intelliparadigm.com 第一章:自然语言提示词的局限性与结构化范式跃迁 传统自然语言提示(Prompt)虽具备易用性和低门槛优势,但在复杂任务中暴露出显著瓶颈:语义模糊性、上下文敏感性弱…...

Linux系统下英特尔Arc显卡驱动安装与AI推理性能调优实战
1. 英特尔Arc显卡在Linux下的独特优势 第一次在Linux系统上折腾英特尔Arc显卡时,我完全被它的性价比震惊了。作为长期使用N卡的开发者,原本只是抱着试试看的心态,结果发现这套组合在AI推理任务中表现远超预期。不同于Windows系统开箱即用的体…...

2025年CMS怎么选?从传统到无头再到AI原生,一份深度选型指南
快速选型参考如果你需要直接的建议,这里是一个基于场景的简明对照:个人博客、小型内容站点:WordPress,生态成熟,主题插件丰富,上手门槛低。多终端内容分发(App、小程序、Web同步)&am…...

掌握Superpowers Skills
Superpowers 是一套面向开发过程的插件化技能系统,旨在帮助个人开发者与团队更高效地完成从需求探索到代码交付的全流程。其内置的十余项技能覆盖了软件开发生命周期的各个关键节点,并且可以按照自然的工作流顺序进行分组与调用。 本文将基于 Superpower…...

如何在FF14中实现三倍效率的钓鱼体验?智能计时助手完全解析
如何在FF14中实现三倍效率的钓鱼体验?智能计时助手完全解析 【免费下载链接】Fishers-Intuition 渔人的直感,最终幻想14钓鱼计时器 项目地址: https://gitcode.com/gh_mirrors/fi/Fishers-Intuition 在《最终幻想14》的广阔世界中,钓鱼…...