Unity丨移动相机朝向目标并确定目标在摄像机可视范围内丨摄像机注释模型丨摄像机移动丨不同尺寸模型优化丨
文章目录
- 问题描述
- 功能展示
- 技术细节
- 小结
问题描述
本文提供的功能是摄像机朝向目标移动,并确定整个目标出现在摄像机视角内,针对不同尺寸的模型优化。
功能展示
提示:这里可以添加技术名词解释

技术细节
直接上代码
using UnityEngine;public class CameraController : MonoBehaviour
{public Transform target; // 模型的Transform组件public float moveSpeed = 5.0f; // 摄像机移动速度public float rotationSpeed = 2.0f; // 摄像机旋转速度public float minDistance = 2.0f; // 摄像机与模型的最小距离public float maxDistanceMultiplier = 1.0f; // 最大距离的倍数private Vector3 targetOffset; // 目标相对于中心的偏移private void Start(){if (target == null){Debug.LogWarning("目标模型为空,请在Inspector中指定目标模型的Transform组件。");return;}// 初始化目标偏移targetOffset = target.position - transform.position;}private void Update(){if (target == null)return;// 计算摄像机指向目标的方向Vector3 targetDirection = target.position - transform.position;targetDirection.y = 0; // 如果只关注水平方向,可以将y轴置为0// 计算摄像机应该旋转的角度Quaternion targetRotation = Quaternion.LookRotation(targetDirection);// 平滑地旋转摄像机朝向目标transform.rotation = Quaternion.Slerp(transform.rotation, targetRotation, rotationSpeed * Time.deltaTime);// 计算摄像机与目标的距离float distance = Vector3.Distance(transform.position, target.position);// 根据模型的大小自动调整最小距离float modelSize = CalculateModelSize();float minDistance = modelSize * 0.5f;// 计算最大距离float maxDistance = modelSize * maxDistanceMultiplier;// 限制距离在最小和最大范围内distance = Mathf.Clamp(distance, minDistance, maxDistance);// 移动摄像机向前transform.Translate(Vector3.forward * moveSpeed * Time.deltaTime);// 计算目标的期望位置Vector3 desiredPosition = target.position - targetOffset - targetDirection.normalized * distance;// 平滑移动摄像机到期望位置transform.position = Vector3.Lerp(transform.position, desiredPosition, Time.deltaTime * moveSpeed);}// 计算模型的大小private float CalculateModelSize(){// 这里可以根据模型的具体情况来计算大小// 例如,可以获取模型的包围盒尺寸// 也可以根据模型中的特定标记来计算大小// 这里只是一个示例,需要根据实际情况进行调整Bounds bounds = new Bounds(target.position, Vector3.one);Renderer[] renderers = target.GetComponentsInChildren<Renderer>();foreach (Renderer renderer in renderers){bounds.Encapsulate(renderer.bounds);}// 返回模型的大小(包围盒的对角线长度)return bounds.size.magnitude;}
}小结
后期可扩展功能:类似点击目标完成视角移动等。
相关文章:
Unity丨移动相机朝向目标并确定目标在摄像机可视范围内丨摄像机注释模型丨摄像机移动丨不同尺寸模型优化丨
文章目录 问题描述功能展示技术细节小结 问题描述 本文提供的功能是摄像机朝向目标移动,并确定整个目标出现在摄像机视角内,针对不同尺寸的模型优化。 功能展示 提示:这里可以添加技术名词解释 技术细节 直接上代码 using UnityEngine;…...

排序算法:归并排序(递归和非递归)
朋友们、伙计们,我们又见面了,本期来给大家解读一下有关排序算法的相关知识点,如果看完之后对你有一定的启发,那么请留下你的三连,祝大家心想事成! C 语 言 专 栏:C语言:从入门到精通…...

数据可视化
一、Flask介绍 #通过访问路径,获取用户的字符串参数 app.route(/user/<name>) def welcome(name):return "你好,%s"%nameapp.route(/user/<int:id>) def welcome2(id):return "你好,%d号的会员"%id能够自动…...
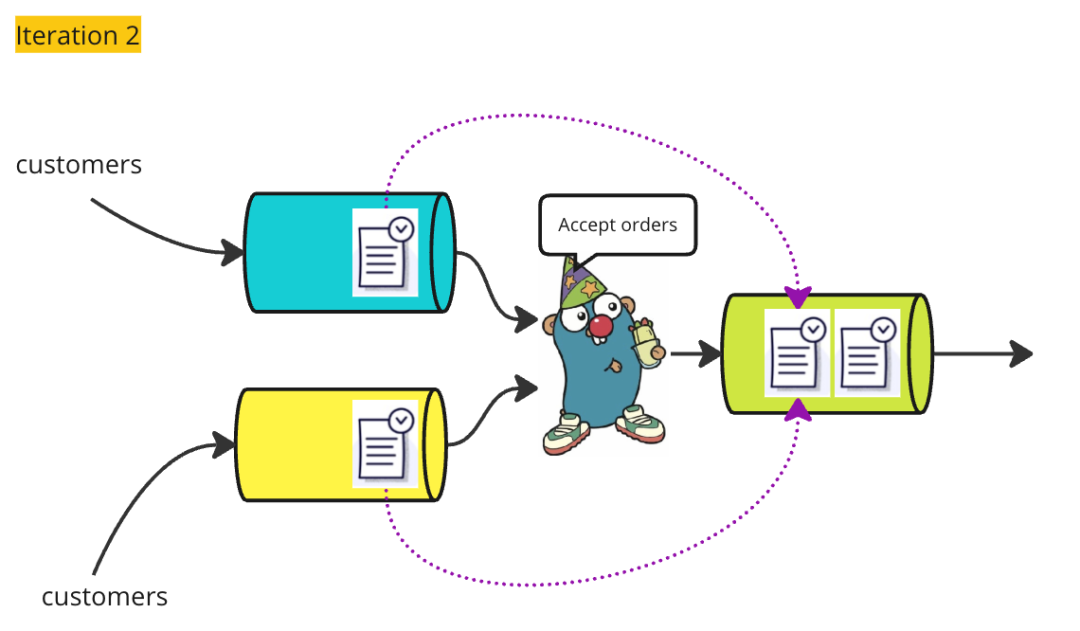
Go并发可视化解释 – select语句
上周,我发布了一篇关于如何直观解释Golang中通道(Channel)的文章。如果你对通道仍然感到困惑,请先查看那篇文章。 Go并发可视化解释 — Channel 作为一个快速复习:Partier、Candier和Stringer经营着一家咖啡店。Partie…...
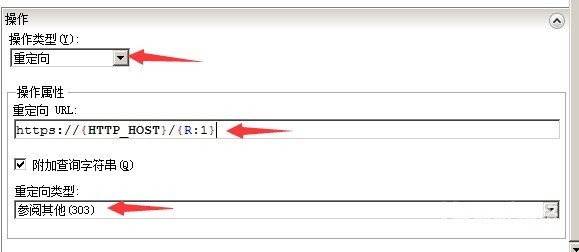
http的网站进行访问时候自动跳转至https
通常情况下我们是用的都是http的路径,对于https的使用也很少,但是随着https的普及越来越多的域名访问需要用到https的,这个我们就演示怎么设置在我们对一个http的网站进行访问时候自动跳转至https下。 用到的工具及软件: 系统:wi…...

realloc
目录 前提须知: 函数介绍: 函数原型: 使用realloc: realloc在调整内存空间的是存在两种情况/使用realloc为扩大空间的两种情况 1.是剩下的没有被分配的空间足够 2 .剩下没有被分配的空间不够了 注意事项: rea…...
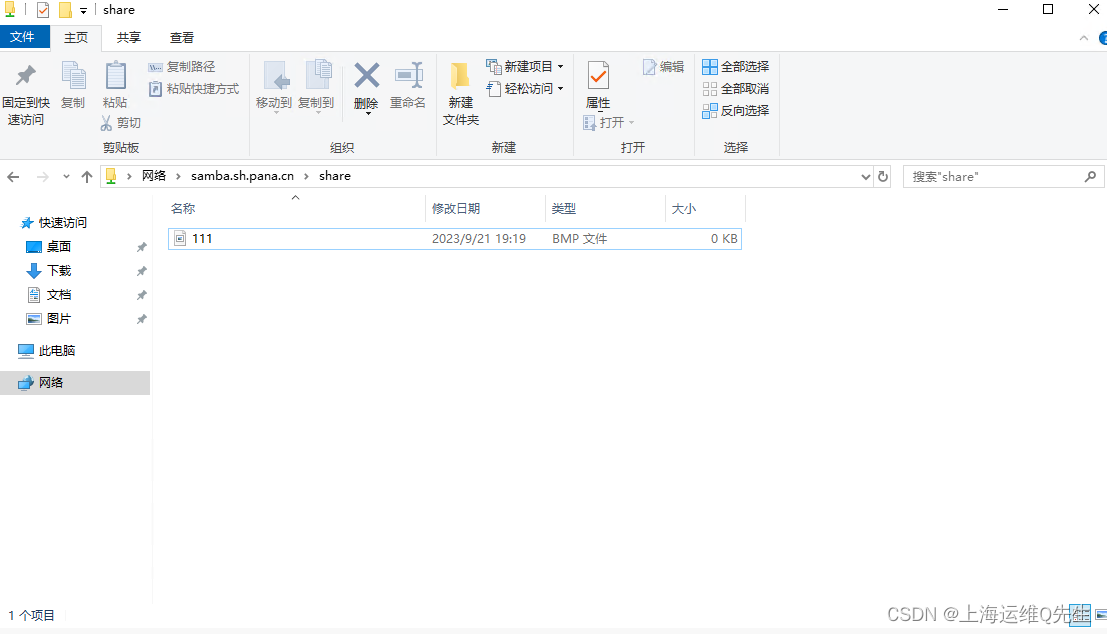
Windows AD域使用Linux Samba
Windows AD域使用Linux Samba 1. 初始化配置 1.1 初始化配置 配置服务器名 hostnamectl set-hostname samba.sh.pana.cnhosts文件配置,确保正常解析到本机和域控 [rootcentos7 ~]# cat /etc/hosts 127.0.0.1 localhost localhost.localdomain localhost4 localhost4.loc…...

Scrapy+Selenium自动化获取个人CSDN文章质量分
前言 本文将介绍如何使用Scrapy和Selenium这两个强大的Python工具来自动获取个人CSDN文章的质量分数。我们将详细讨论Scrapy爬虫框架的使用,以及如何结合Selenium浏览器自动化工具来实现这一目标。无需手动浏览每篇文章,我们可以轻松地获取并记录文章的…...
【Android Framework系列】第15章 Fragment+ViewPager与Viewpager2相关原理
1 前言 上一章节【Android Framework系列】第14章 Fragment核心原理(AndroidX版本)我们学习了Fragment的核心原理,本章节学习常用的FragmentViewPager以及FragmentViewPager2的相关使用和一些基本的源码分析。 2 FragmentViewPager 我们常用的两个Page…...
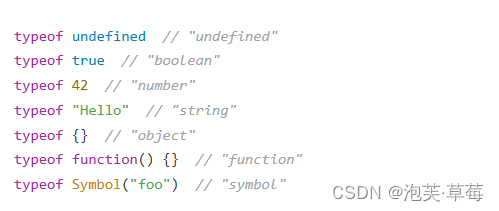
typeof的作用
typeof 是 JavaScript 中的一种运算符,用于获取给定值的数据类型。 它的作用是返回一个字符串,表示目标值的数据类型。通过使用 typeof 运算符,我们可以在运行时确定一个值的类型,从而进行相应的处理或逻辑判断。 常见的数据类型…...

性能测试 —— Tomcat监控与调优:status页监控
Tomcat服务器是一个免费的开放源代码的Web 应用服务器,Tomcat是Apache 软件基金会(Apache Software Foundation)Jakarta 项目中的一个核心项目,由Apache、Sun 和其他一些公司及个人共同开发而成。 Tomcat是一个轻量级应用服务器,在中小型系统…...

Ubuntu 安装 CUDA 与 CUDNN GPU加速引擎
一、NVIDIA(英伟达)显卡驱动安装 NVIDIA显卡驱动可以通过指令sudo apt purge nvidia*删除以前安装的NVIDIA驱动版本,重新安装。 1.1. 关闭系统自带驱动nouveau 注意!在安装NVIDIA驱动以前需要禁止系统自带显卡驱动nouveau…...
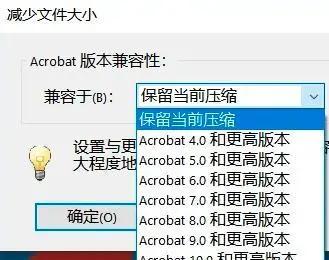
pdf文件太大如何处理?教你pdf压缩简单方法
PDF文件过大,是很多人在使用PDF文件时都遇到过的一个常见问题,过大的PDF文件不仅会占用大量的存储空间,还会影响文件传输和处理效率,下面给大家总结了几个方法,帮助大家解决PDF文件过大的问题。 方法一:嗨格…...
——nacos注册中心(1))
Nacos使用教程(二)——nacos注册中心(1)
文章目录 Nacos vs Eureka介绍架构设计Nacos架构Eureka架构 功能特性服务注册与发现配置管理健康检查 生态系统支持可用性与稳定性总结 Nacos中的CAP原则介绍CAP原则一致性(Consistency)可用性(Availability)分区容错性࿰…...

蓝桥杯2023年第十四届省赛真题-买瓜--C语言题解
目录 蓝桥杯2023年第十四届省赛真题-买瓜 题目描述 输入格式 输出格式 样例输入 样例输出 提示 【思路解析】 【代码实现】 蓝桥杯2023年第十四届省赛真题-买瓜 时间限制: 3s 内存限制: 320MB 提交: 796 解决: 69 题目描述 小蓝正在一个瓜摊上买瓜。瓜摊上共有 n 个…...
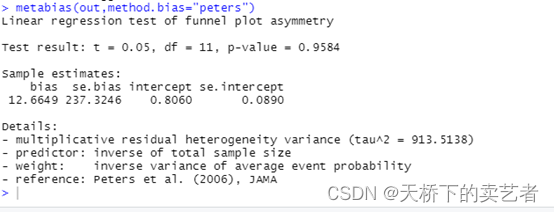
R语言进行孟德尔随机化+meta分析(1)---meta分析基础
目前不少文章用到了孟德尔随机化meta分析,今天咱们也来介绍一下,孟德尔随机化meta其实主要就是meta分析的过程,提取了孟德尔随机化文章的结果,实质上就是个meta分析,不过多个孟德尔随机化随机化的结果合并更加加强了结…...
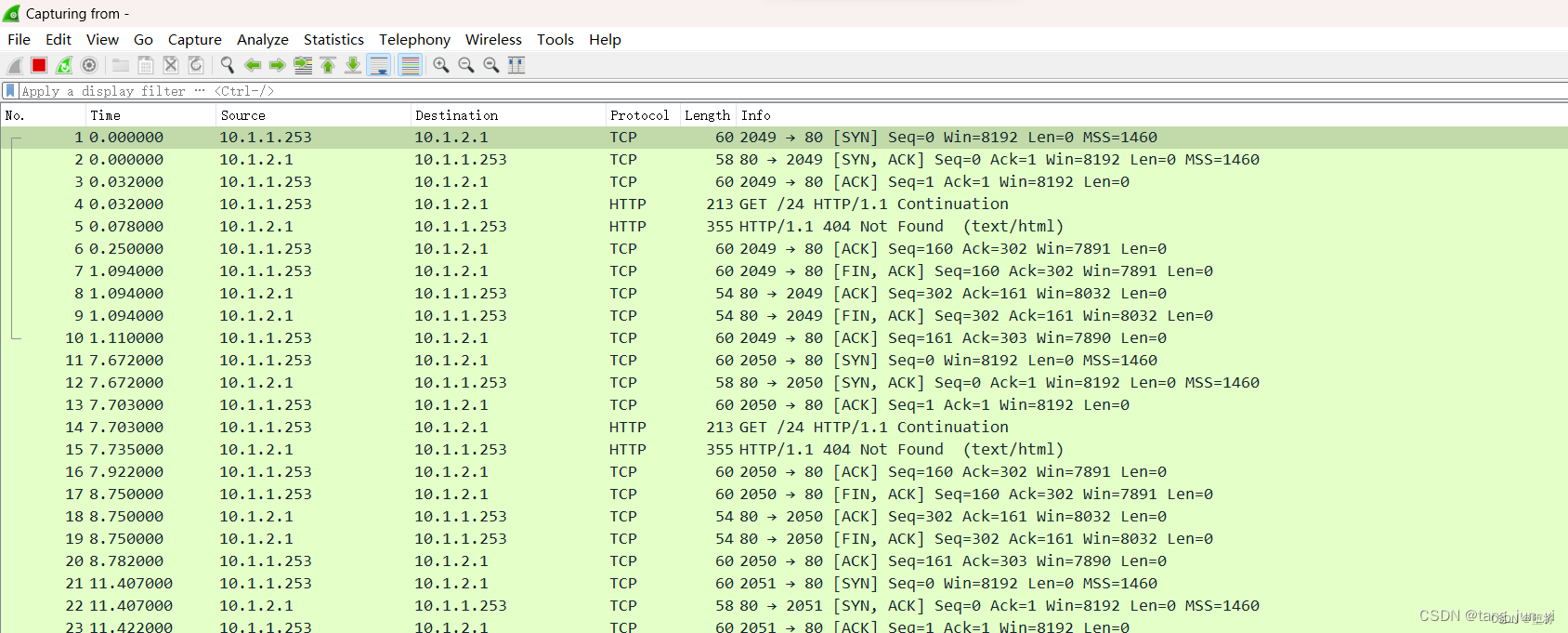
网络安全第一次作业
1、什么是防火墙 防火墙是一种网络安全系统,它根据预先确定的安全规则监视和控制传入和传出的网络流量。其主要目的是阻止对计算机或网络的未经授权的访问,同时允许合法通信通过。 防火墙可以在硬件、软件或两者的组合中实现,并且可以配置为根…...
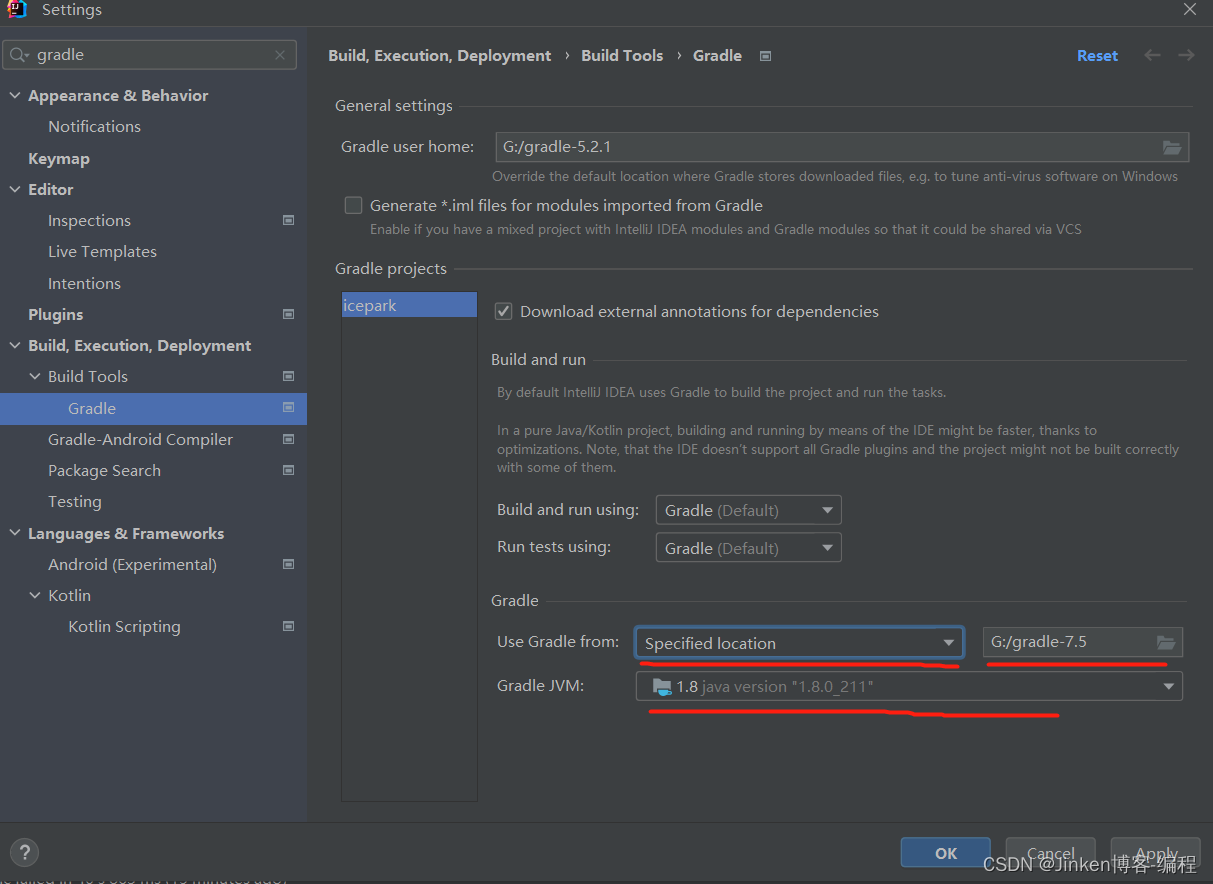
idea设置gradle
1、不选中 2、下面选specified location 指定gradle目录...
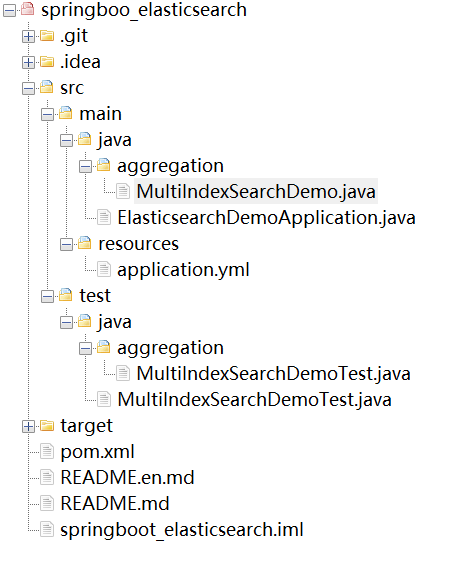
基于Elasticsearch的多文档检索 比如 商品(goods)、案例(cases)
概述 Elasticsearch多文档聚合检索 详细 记得把这几点描述好咯:需求(要做什么) 代码实现过程 项目文件结构截图 演示效果 应用场景 我们需要在五种不同的文档中检索数据。 比如 商品(goods)、案例(ca…...

9月18日,每日信息差
今天是2023年09月19日,以下是为您准备的11条信息差 第一、江苏无锡首次获得6000年前古人类DNA 第二、全球天然钻石价格暴跌。数据显示,国际钻石交易所钻石价格指数在2022年3月达到158的历史峰值,之后一路下跌到目前的110左右,创…...

加拿大无人机产业:从感知到执行的自主化跃迁与BVLOS破局
1. 加拿大无人机产业的现状与挑战提起无人机,很多人脑海里首先蹦出来的可能是大疆,那个在全球消费级和部分商用市场占据绝对主导地位的中国品牌。这确实是一个不争的事实,也是加拿大本土无人机产业必须直面的现实。我接触过不少加拿大的初创公…...

如何通过Python快速接入Taotoken并调用多模型API完成文本生成任务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何通过Python快速接入Taotoken并调用多模型API完成文本生成任务 1. 准备工作:获取API Key与模型ID 在开始编写代码之…...

终极KMS激活指南:如何一键永久激活Windows和Office
终极KMS激活指南:如何一键永久激活Windows和Office 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows系统弹出激活警告而烦恼吗?或者Office软件突然变成只读模…...

微信防撤回终极指南:3分钟永久保存重要信息
微信防撤回终极指南:3分钟永久保存重要信息 【免费下载链接】RevokeMsgPatcher :trollface: A hex editor for WeChat/QQ/TIM - PC版微信/QQ/TIM防撤回补丁(我已经看到了,撤回也没用了) 项目地址: https://gitcode.com/GitHub_T…...

第八部分-企业级实践——40. 容器成本优化
40. 容器成本优化 1. 成本优化概述 容器成本优化涉及资源利用率、云成本、存储成本、运维成本等多个维度。通过合理配置和优化策略,可以显著降低容器化环境的总体拥有成本(TCO)。 ┌────────────────────────────…...

收藏!AI时代程序员是消失还是逆袭?小白程序员必看大模型逆袭指南
收藏!AI时代程序员是消失还是逆袭?小白程序员必看大模型逆袭指南 文章探讨了AI对程序员行业的影响,指出AI抢走了程序员一半的饭碗,但也为另一半人打开了高阶职场的大门。初级岗位因AI工具普及而面临失业风险,但高级技术…...

从数据焦虑到数字资产:WeChatExporter如何重塑你的微信记忆管理
从数据焦虑到数字资产:WeChatExporter如何重塑你的微信记忆管理 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾因手机存储空间不足而不得不删除珍贵…...

5分钟解锁你的网易云音乐:NCM解密工具全攻略
5分钟解锁你的网易云音乐:NCM解密工具全攻略 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾经遇到过这样的困扰:从网易云音乐下载的歌曲只能在特定客户端播放,无法在其他设备上欣赏&…...

国产替代之SFT1452-TL-W与VBE1251K参数对比报告
N沟道功率MOSFET参数对比分析报告一、产品概述SFT1452-TL-W:安森美(onsemi)N沟道硅功率MOSFET,耐压250V,低导通电阻,低输入电容,采用10V驱动,符合无卤素标准,具有ESD二极…...

杂交瘤技术:单克隆抗体制备的经典核心技术
杂交瘤技术(Hybridoma Technology)是通过人工细胞融合技术,将经抗原免疫的 B 淋巴细胞与骨髓瘤细胞融合,构建可无限增殖且分泌高纯度、高特异性单克隆抗体的杂交瘤细胞系的核心技术。该技术由 Georges Kohler 与 Cesar Milstein 于…...