ROS2 驱动思岚G4雷达(ydlidar)- Rviz显示
记录G4雷达的配置
系统环境为:Ubuntu22.04
配置步骤
1、安装雷达SDK
2、构建 G4 雷达 ROS2 项目工程文件
3、使用Rviz可视化界面显示
1、安装雷达SDK
1.1 安装CMake
YDLidar SDK需要CMake 2.8.2+作为依赖项
- Ubuntu 18.04或者Ubuntu 22.04
sudo apt install cmake pkg-config
如果使用python API,您需要安装python和swig(3.0或更高版本)
sudo apt-get install python swig
sudo apt-get install python-pip
1.2 构建YDLidar SDK
在YDLidar SDK目录中,运行以下命令来编译项目:
git clone https://github.com/YDLIDAR/YDLidar-SDK.git
cd YDLidar-SDK/build
cmake ..
make
sudo make install
注意:如果已经安装了python和swig,sudo make install命令也将安装python API,而无需执行以下操作,在这里建议大家还是使用一次 sudo make install 确认安装成功
至此,若在编译过程中未出现错误,即为SDK安装成功
2、构建 G4 雷达 ROS2 项目工程文件
2.1 编译和安装YDLidar SDK
ydlidar_ros2_driver依赖于ydlidar SDK库。如果从未安装过YDLidar SDK库,则必须首先安装YDLidar SDK库,具体的可以参考上一点:
2.2 Cylinder_ros2_driver克隆
(1)为github克隆ydlidar_ros2_driver包:
git clone https://github.com/YDLIDAR/ydlidar_ros2_driver.git ydlidar_ros2_ws/src/ydlidar_ros2_driver
(2)构建ydlidar_ros2_driver包
cd ydlidar_ros2_ws
colcon build --symlink-install
(3)程序包环境设置:
将工作空间添加到环境变量里面
source ./install/setup.bash
同样可以使用比较长久的方法:
echo "source ~/ydlidar_ros2_ws/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
在这里 “~/ydlidar_ros2_ws/install/setup.bash路径要对应上自己的工作空间当中的setup.bash位置。
(4)确认要确认包路径已设置,请打印grep-i ROS变量
printenv | grep -i ROS
应该看到类似的内容:OLDPWD=/home/tony/ydlidar_ros2_ws/install
(5)创建串行端口别名[可选]
sudo chmod 0777 src/ydlidar_ros2_driver/startup/*
sudo sh src/ydlidar_ros2_driver/startup/initenv.sh
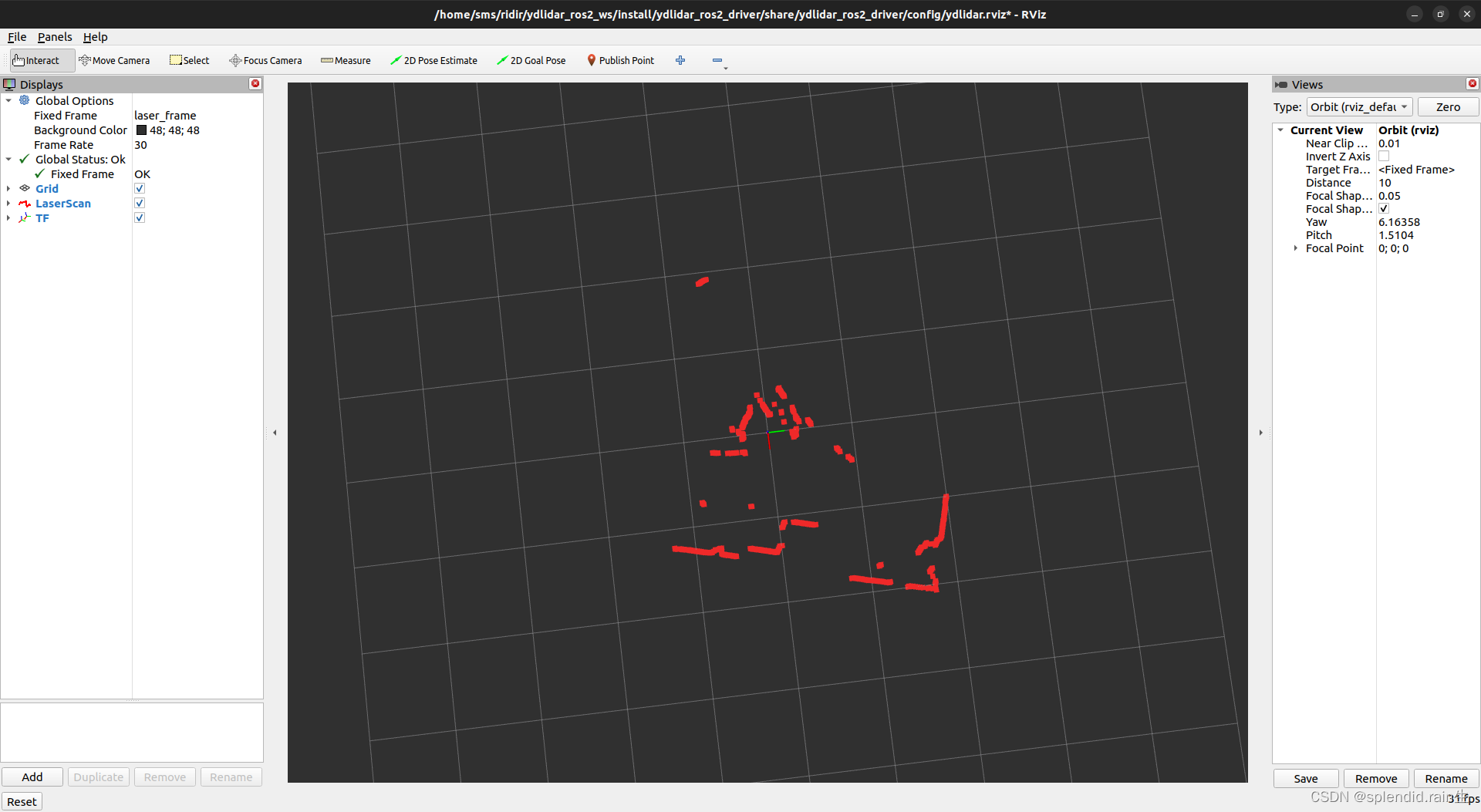
3、使用Rviz可视化界面显示
使用启动文件运行ydlidar_ros2_driver
3.1 运行雷达启动launch文件
ros2 launch ydlidar_ros2_driver ydlidar_launch.py
或者
ros2 launch $(ros2 pkg prefix ydlidar_ros2_driver)/share/ydlidar_ros2_driver/launch/ydlidar.py
3.2运行可视化界面
如果想要运行可视化界面的话可以使用一下命令,单独在终端里运行即可
ros2 launch ydlidar_ros2_driver ydlidar_launch_view.py
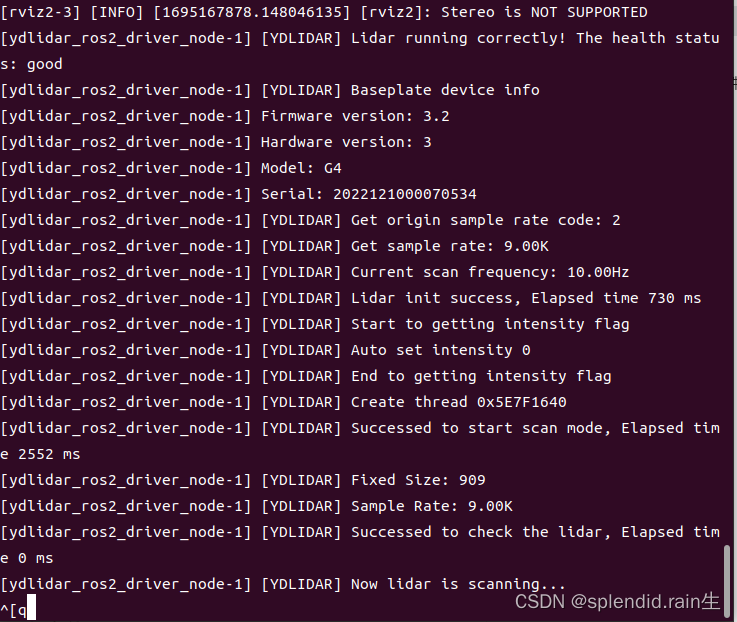
3、查看一下雷达扫描话题信息
ros2 run ydlidar_ros2_driver ydlidar_ros2_driver_client or ros2 topic echo /scan

问题解决
1、launch文件修改
在编译过程当中,出现了ydlidar_launch_view.py文件或者ydlidar_launch.py文件中的
[ERROR] [launch]: Caught exception in launch LifecycleNode: __init__() missing 1 required keyword-only argument: 'node_executable'
这样的错误警告,将两个文件当中含有node_[后缀名称]更改为[后缀名称即可]
例如,在本次报错当中,需要将LifecycleNode这个节点的node_executable更改为executable即可,其他的node_name同样的更改为 name
#!/usr/bin/python3
# Copyright 2020, EAIBOT
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.from ament_index_python.packages import get_package_share_directoryfrom launch import LaunchDescription
from launch_ros.actions import LifecycleNode
from launch_ros.actions import Node
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch.actions import LogInfoimport lifecycle_msgs.msg
import osdef generate_launch_description():share_dir = get_package_share_directory('ydlidar_ros2_driver')rviz_config_file = os.path.join(share_dir, 'config','ydlidar.rviz')parameter_file = LaunchConfiguration('params_file')# node_name = 'ydlidar_ros2_driver_node'params_declare = DeclareLaunchArgument('params_file',default_value=os.path.join(share_dir, 'params', 'ydlidar.yaml'),description='FPath to the ROS2 parameters file to use.')driver_node = LifecycleNode(package='ydlidar_ros2_driver',executable='ydlidar_ros2_driver_node',name='ydlidar_ros2_driver_node',output='screen',emulate_tty=True,parameters=[parameter_file],namespace='/',)tf2_node = Node(package='tf2_ros',executable='static_transform_publisher',name='static_tf_pub_laser',arguments=['0', '0', '0.02','0', '0', '0', '1','base_link','laser_frame'],)rviz2_node = Node(package='rviz2',executable='rviz2',name='rviz2',arguments=['-d', rviz_config_file],)return LaunchDescription([params_declare,driver_node,tf2_node,rviz2_node,])上图对应的是 "ydlidar_launch_view.py"文件,然后ydlidar_launch.py文件中对应的两个参数,也就是node_executable和node_name 两个变量名字做出修改,修改后如下代码所示:
#!/usr/bin/python3
# Copyright 2020, EAIBOT
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.from ament_index_python.packages import get_package_share_directoryfrom launch import LaunchDescription
from launch_ros.actions import LifecycleNode
from launch_ros.actions import Node
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch.actions import LogInfoimport lifecycle_msgs.msg
import osdef generate_launch_description():share_dir = get_package_share_directory('ydlidar_ros2_driver')parameter_file = LaunchConfiguration('params_file')# node_name = 'ydlidar_ros2_driver_node'params_declare = DeclareLaunchArgument('params_file',default_value=os.path.join(share_dir, 'params', 'ydlidar.yaml'),description='FPath to the ROS2 parameters file to use.')driver_node = LifecycleNode(package='ydlidar_ros2_driver',executable='ydlidar_ros2_driver_node',name='ydlidar_ros2_driver_node',output='screen',emulate_tty=True,parameters=[parameter_file],namespace='/',)tf2_node = Node(package='tf2_ros',executable='static_transform_publisher',name='static_tf_pub_laser',arguments=['0', '0', '0.02','0', '0', '0', '1','base_link','laser_frame'],)return LaunchDescription([params_declare,driver_node,tf2_node,])建议使用 vscode 编辑器对文本进行更改,以便可以重复撤回和更加便携式的文本切换
2、如果出现node节点链接错误
然后就是在编译过程(colcon build --symlink-install)中,如果出现node节点链接错误的情况,需要更改当前目录下的
ydlidar_ros2_driver/src/ydlidar_ros2_driver_node.cpp 这个文件内容(直接复制替换即可)
/** YDLIDAR SYSTEM* YDLIDAR ROS 2 Node** Copyright 2017 - 2020 EAI TEAM* http://www.eaibot.com**//* Modified for Humble by @lghrainbow 10/2022 */#ifdef _MSC_VER
#ifndef _USE_MATH_DEFINES
#define _USE_MATH_DEFINES
#endif
#endif#include "src/CYdLidar.h"
#include <math.h>
#include <chrono>
#include <iostream>
#include <memory>#include "rclcpp/clock.hpp"
#include "rclcpp/rclcpp.hpp"
#include "rclcpp/time_source.hpp"
#include "sensor_msgs/msg/laser_scan.hpp"
#include "std_srvs/srv/empty.hpp"
#include <vector>
#include <iostream>
#include <string>
#include <signal.h>#define ROS2Verision "1.0.2" /* 1.0.1 modified */int main(int argc, char *argv[]) {rclcpp::init(argc, argv);auto node = rclcpp::Node::make_shared("ydlidar_ros2_driver_node");RCLCPP_INFO(node->get_logger(), "[YDLIDAR INFO] Current ROS Driver Version: %s\n", ((std::string)ROS2Verision).c_str());CYdLidar laser;std::string str_optvalue = "/dev/ydlidar";node->declare_parameter<std::string>("port");node->get_parameter("port", str_optvalue);///lidar portlaser.setlidaropt(LidarPropSerialPort, str_optvalue.c_str(), str_optvalue.size());///ignore arraystr_optvalue = "";node->declare_parameter<std::string>("ignore_array");node->get_parameter("ignore_array", str_optvalue);laser.setlidaropt(LidarPropIgnoreArray, str_optvalue.c_str(), str_optvalue.size());std::string frame_id = "laser_frame";node->declare_parameter<std::string>("frame_id");node->get_parameter("frame_id", frame_id);//int property//// lidar baudrateint optval = 230400;node->declare_parameter<int>("baudrate");node->get_parameter("baudrate", optval);laser.setlidaropt(LidarPropSerialBaudrate, &optval, sizeof(int));/// tof lidaroptval = TYPE_TRIANGLE;node->declare_parameter<int>("lidar_type");node->get_parameter("lidar_type", optval);laser.setlidaropt(LidarPropLidarType, &optval, sizeof(int));/// device typeoptval = YDLIDAR_TYPE_SERIAL;node->declare_parameter<int>("device_type");node->get_parameter("device_type", optval);laser.setlidaropt(LidarPropDeviceType, &optval, sizeof(int));/// sample rateoptval = 9;node->declare_parameter<int>("sample_rate");node->get_parameter("sample_rate", optval);laser.setlidaropt(LidarPropSampleRate, &optval, sizeof(int));/// abnormal countoptval = 4;node->declare_parameter<int>("abnormal_check_count");node->get_parameter("abnormal_check_count", optval);laser.setlidaropt(LidarPropAbnormalCheckCount, &optval, sizeof(int));//bool property//// fixed angle resolutionbool b_optvalue = false;node->declare_parameter<bool>("fixed_resolution");node->get_parameter("fixed_resolution", b_optvalue);laser.setlidaropt(LidarPropFixedResolution, &b_optvalue, sizeof(bool));/// rotate 180b_optvalue = true;node->declare_parameter<bool>("reversion");node->get_parameter("reversion", b_optvalue);laser.setlidaropt(LidarPropReversion, &b_optvalue, sizeof(bool));/// Counterclockwiseb_optvalue = true;node->declare_parameter<bool>("inverted");node->get_parameter("inverted", b_optvalue);laser.setlidaropt(LidarPropInverted, &b_optvalue, sizeof(bool));b_optvalue = true;node->declare_parameter<bool>("auto_reconnect");node->get_parameter("auto_reconnect", b_optvalue);laser.setlidaropt(LidarPropAutoReconnect, &b_optvalue, sizeof(bool));/// one-way communicationb_optvalue = false;node->declare_parameter<bool>("isSingleChannel");node->get_parameter("isSingleChannel", b_optvalue);laser.setlidaropt(LidarPropSingleChannel, &b_optvalue, sizeof(bool));/// intensityb_optvalue = false;node->declare_parameter<bool>("intensity");node->get_parameter("intensity", b_optvalue);laser.setlidaropt(LidarPropIntenstiy, &b_optvalue, sizeof(bool));/// Motor DTRb_optvalue = false;node->declare_parameter<bool>("support_motor_dtr");node->get_parameter("support_motor_dtr", b_optvalue);laser.setlidaropt(LidarPropSupportMotorDtrCtrl, &b_optvalue, sizeof(bool));//float property//// unit: °float f_optvalue = 180.0f;node->declare_parameter<float>("angle_max");node->get_parameter("angle_max", f_optvalue);laser.setlidaropt(LidarPropMaxAngle, &f_optvalue, sizeof(float));f_optvalue = -180.0f;node->declare_parameter<float>("angle_min");node->get_parameter("angle_min", f_optvalue);laser.setlidaropt(LidarPropMinAngle, &f_optvalue, sizeof(float));/// unit: mf_optvalue = 64.f;node->declare_parameter<float>("range_max");node->get_parameter("range_max", f_optvalue);laser.setlidaropt(LidarPropMaxRange, &f_optvalue, sizeof(float));f_optvalue = 0.1f;node->declare_parameter<float>("range_min");node->get_parameter("range_min", f_optvalue);laser.setlidaropt(LidarPropMinRange, &f_optvalue, sizeof(float));/// unit: Hzf_optvalue = 10.f;node->declare_parameter<float>("frequency");node->get_parameter("frequency", f_optvalue);laser.setlidaropt(LidarPropScanFrequency, &f_optvalue, sizeof(float));bool invalid_range_is_inf = false;node->declare_parameter<bool>("invalid_range_is_inf");node->get_parameter("invalid_range_is_inf", invalid_range_is_inf);bool ret = laser.initialize();if (ret) {ret = laser.turnOn();} else {RCLCPP_ERROR(node->get_logger(), "%s\n", laser.DescribeError());}auto laser_pub = node->create_publisher<sensor_msgs::msg::LaserScan>("scan", rclcpp::QoS(rclcpp::SensorDataQoS()));auto stop_scan_service =[&laser](const std::shared_ptr<rmw_request_id_t> request_header,const std::shared_ptr<std_srvs::srv::Empty::Request> req,std::shared_ptr<std_srvs::srv::Empty::Response> response) -> bool{return laser.turnOff();};auto stop_service = node->create_service<std_srvs::srv::Empty>("stop_scan",stop_scan_service);auto start_scan_service =[&laser](const std::shared_ptr<rmw_request_id_t> request_header,const std::shared_ptr<std_srvs::srv::Empty::Request> req,std::shared_ptr<std_srvs::srv::Empty::Response> response) -> bool{return laser.turnOn();};auto start_service = node->create_service<std_srvs::srv::Empty>("start_scan",start_scan_service);rclcpp::WallRate loop_rate(20);while (ret && rclcpp::ok()) {LaserScan scan;//if (laser.doProcessSimple(scan)) {auto scan_msg = std::make_shared<sensor_msgs::msg::LaserScan>();scan_msg->header.stamp.sec = RCL_NS_TO_S(scan.stamp);scan_msg->header.stamp.nanosec = scan.stamp - RCL_S_TO_NS(scan_msg->header.stamp.sec);scan_msg->header.frame_id = frame_id;scan_msg->angle_min = scan.config.min_angle;scan_msg->angle_max = scan.config.max_angle;scan_msg->angle_increment = scan.config.angle_increment;scan_msg->scan_time = scan.config.scan_time;scan_msg->time_increment = scan.config.time_increment;scan_msg->range_min = scan.config.min_range;scan_msg->range_max = scan.config.max_range;int size = (scan.config.max_angle - scan.config.min_angle)/ scan.config.angle_increment + 1;scan_msg->ranges.resize(size);scan_msg->intensities.resize(size);for(size_t i=0; i < scan.points.size(); i++) {int index = std::ceil((scan.points[i].angle - scan.config.min_angle)/scan.config.angle_increment);if(index >=0 && index < size) {scan_msg->ranges[index] = scan.points[i].range;scan_msg->intensities[index] = scan.points[i].intensity;}}laser_pub->publish(*scan_msg);} else {RCLCPP_ERROR(node->get_logger(), "Failed to get scan");}if(!rclcpp::ok()) {break;}rclcpp::spin_some(node);loop_rate.sleep();}RCLCPP_INFO(node->get_logger(), "[YDLIDAR INFO] Now YDLIDAR is stopping .......");laser.turnOff();laser.disconnecting();rclcpp::shutdown();return 0;
}
🌸🌸🌸完结撒花🌸🌸🌸
🌈🌈Redamancy🌈🌈
相关文章:
ROS2 驱动思岚G4雷达(ydlidar)- Rviz显示
记录G4雷达的配置 系统环境为:Ubuntu22.04 配置步骤 1、安装雷达SDK 2、构建 G4 雷达 ROS2 项目工程文件 3、使用Rviz可视化界面显示 1、安装雷达SDK 1.1 安装CMake YDLidar SDK需要CMake 2.8.2作为依赖项 Ubuntu 18.04或者Ubuntu 22.04 sudo apt install cmak…...
Spring Cloud Alibaba Sentinel流量防卫兵
文章目录 Spring Cloud Alibaba Sentinel流量防卫兵1. 分布式遇到的问题2.解决的方法 Sentinel: 分布式系统的流量防卫兵1. 简介和特折 Sentinel流量防卫兵的搭建1.引入依赖2.添加配置类3.运行类上添加SentinelResource,并配置blockHandler和fallback4. linux中放入…...
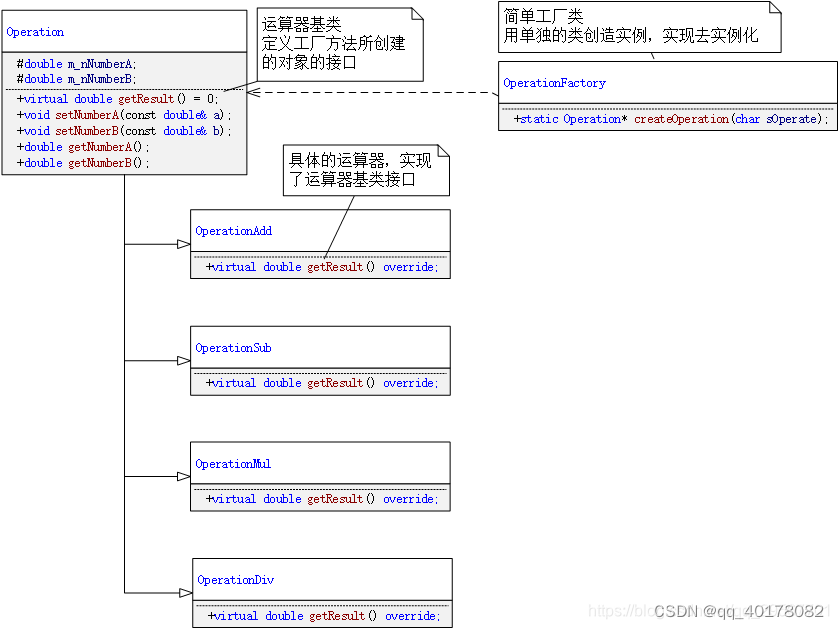
1.简单工厂模式
UML类图 代码 main.cpp #include <iostream> #include "OperationFactory.h" using namespace std;int main(void) {float num1;float num2;char operate;cin >> num1 >> num2 >> operate;Operation* oper OperationFactory::createOpera…...

GitHub Copilot Chat
9月21日,GitHub在官网宣布,所有个人开发者可以使用GitHub Copilot Chat。用户通过文本问答方式就能生成、检查、分析各种代码。 据悉,GitHub Copilot Chat是基于OpenAI的GPT-4模型打造而成,整体使用方法与ChatGPT类似。例如&…...

利用 QT 完成一个人脸识别系统,完成登录操作
1.配置文件 # Project created by QtCreator 2023-09-22T10:34:23 # #-------------------------------------------------QT core guigreaterThan(QT_MAJOR_VERSION, 4): QT widgetsTARGET project TEMPLATE appSOURCES main.cpp\widget.cppHEADERS widget.hFOR…...
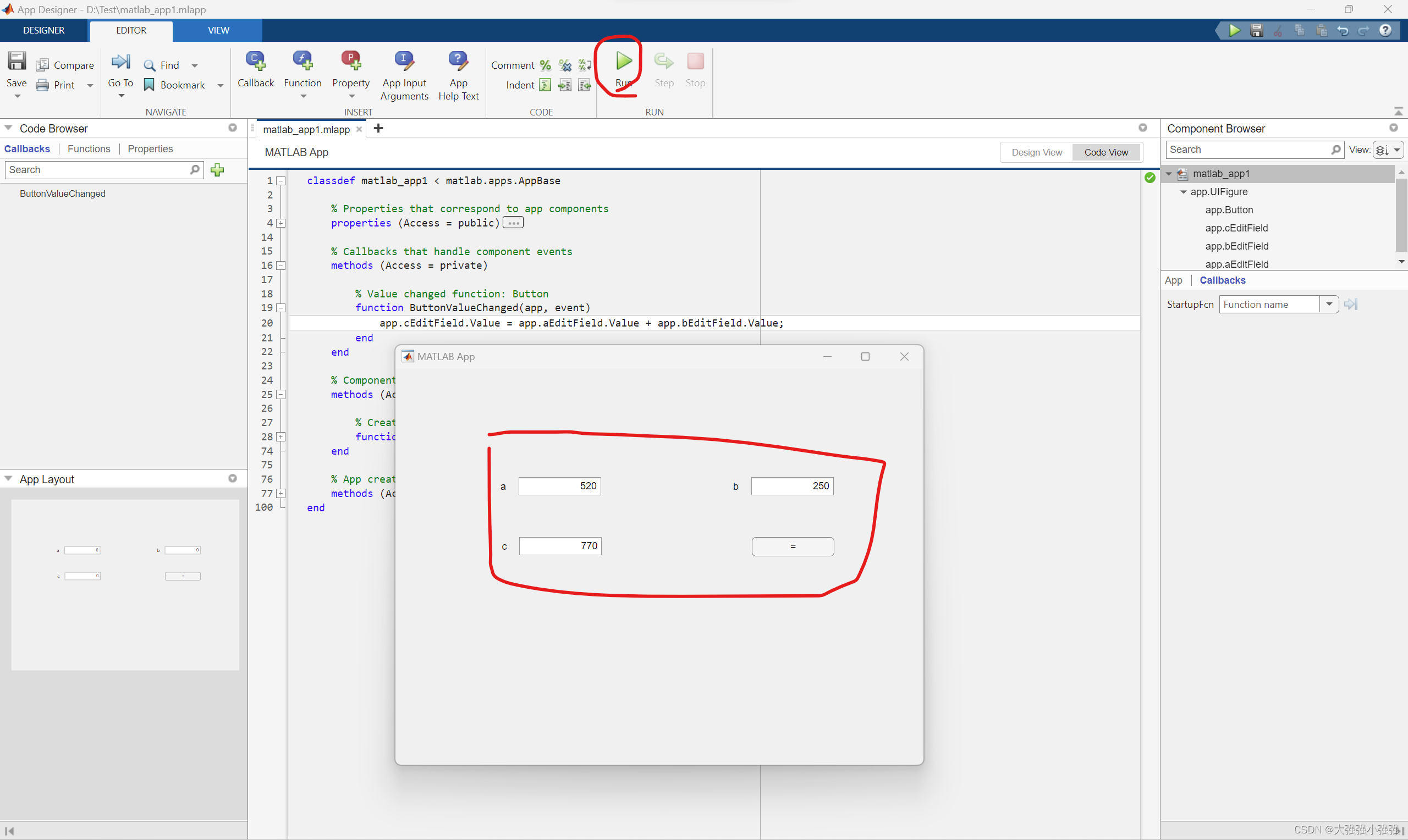
MATLAB APP纯小白入门 两数相加
万事开头难,最怕第一次。使用matlab APP 实现两数求和,如下图所示,c a b,输入数字后,按 “” 就计算。 步骤 拖拽三个 Edit Field(Numeric) 过来,并且双击名字分别改为 a,b,c。注意修改名字后右边会有点变…...
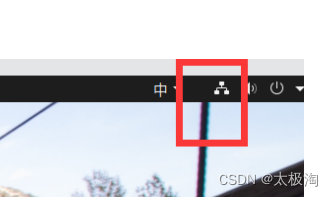
ubuntu右上角的网络连接图标消失解决办法
ubuntu更新了几个文件后,我的ubuntu系统右上角的网络连接图标就消失了,然后怎么也找不到了,怎么办呢? 1、按快捷键ctrlaltt打开终端 2、按以下顺序输入如下的命令行 sudo service network-manager stop sudo rm /var/lib/Netw…...

conda创建虚拟环境安装aix360
目录 创建虚拟环境查看已有虚拟环境进入所创建的虚拟环境查看已安装的程序查看已安装的python模块配置镜像pipconda 安装aix360将环境添加到jupyter删除虚拟环境 创建虚拟环境 conda create -n aix360 python3.9查看已有虚拟环境 conda env list进入所创建的虚拟环境 activa…...

CentOS安装mariadb
1、 安装 [rootlocalhost ~]# yum install mariadb mariadb-server2、 启动并自启 [rootecs-3f21 ~]# systemctl enable mariadb –now3、 查看启动状态 [rootecs-3f21 ~]# systemctl status mariadb4、 初始化mariadb并设置root密码 [rootecs-3f21 ~]# mysql_secure_inst…...

FPGA——基础知识合集
文章目录 前言1、简述触发器与锁存器的区别2、简述 if-else 语句和 case 语句的区别3、相对 ARM、DSP 等处理器,谈谈 FPGA 具有哪些优势4、简述 Verilog 语句中阻塞赋值与非阻塞赋值的含义与区别,以及各自的适用的场景5、什么是同步电路,什么…...
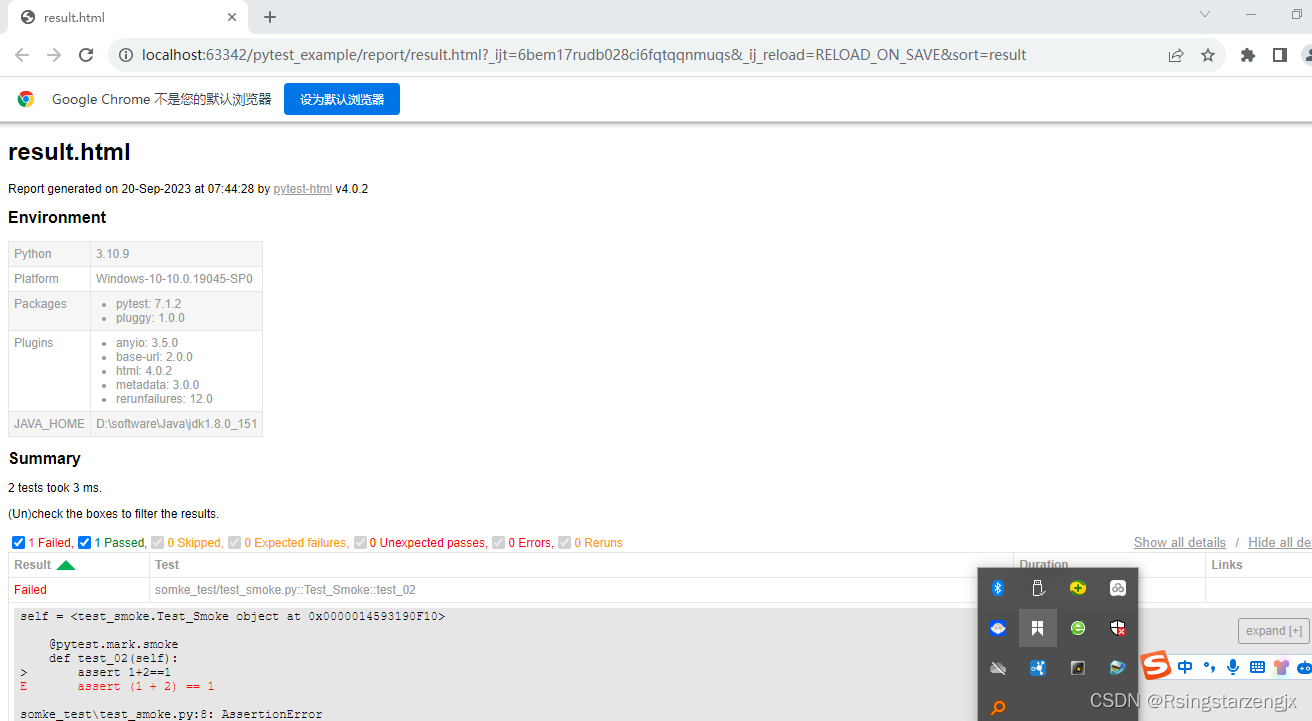
【pytest】 标记冒烟用例 @pytest.mark.smoke
1. 使用 pytest.mark.smoke 标记用例 import pytest class Test_Smoke:def test_01(self):assert 112pytest.mark.smokedef test_02(self):assert 121pytest.mark.smokedef test_03(self):assert 1 2 3 2.配置文件pytest.ini [pytest] markers smoke 3. 运行指定标签 运…...
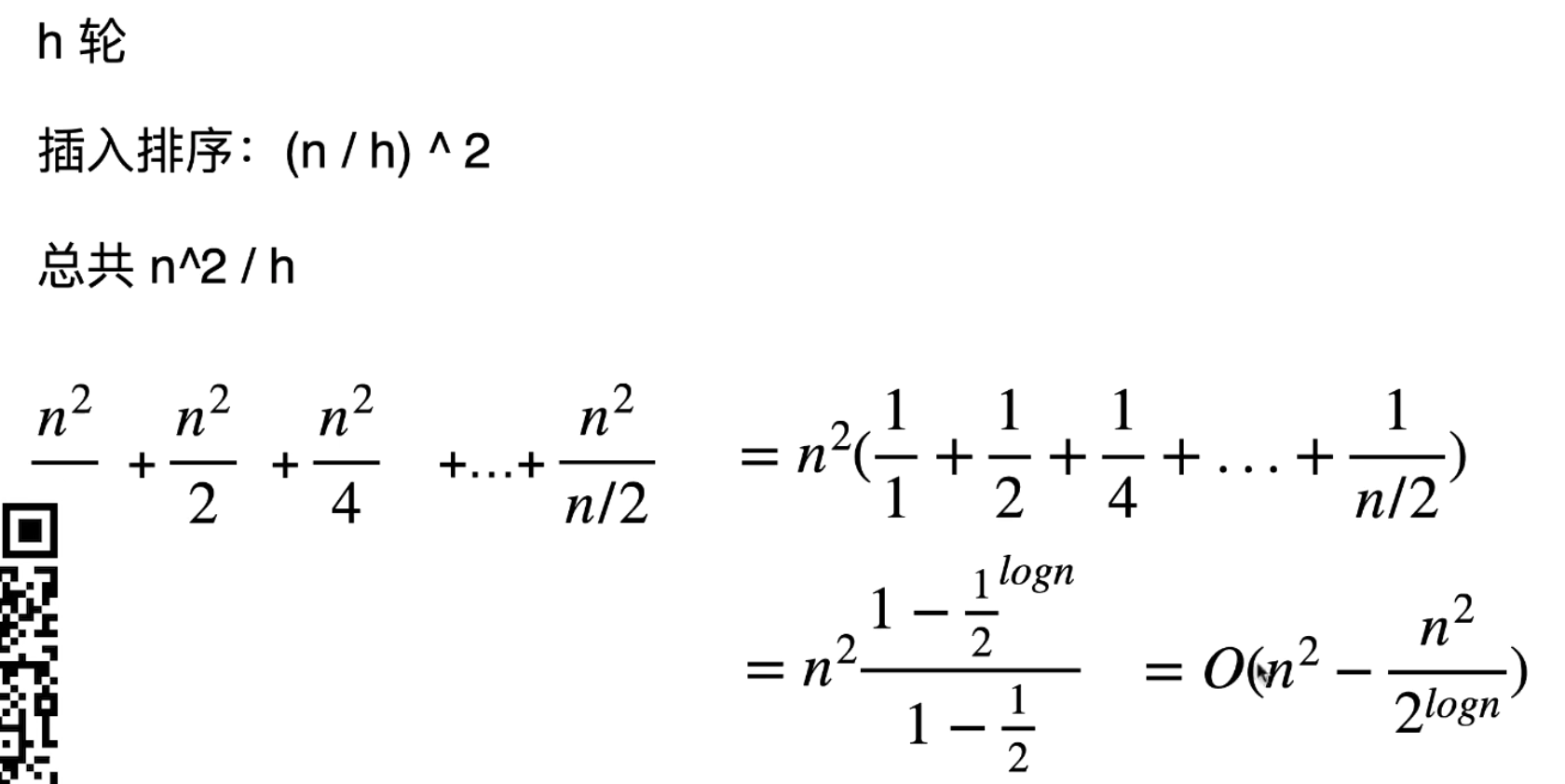
数据结构入门-14-排序
一、选择排序 1.1 选择排序思想 先把最小的元素拿出来 剩下的,再把最小的拿出来 剩下的,再把最小的拿出来 但是这样 空间复杂度是O(n) 优化一下,希望原地排序 1.1.2 选择原地排序 索引i指向0的位置 索引j指向i1的元素 j 后面的元素遍历&…...
Gin学习记录4——Controller和中间件
一. Controller 用不同的Controller可以实现业务的分类,不同类型的请求可以共用同一套中间件 1.1 单文件Controller 几乎等同于函数封装,直接将ctrl的代码写入到一个文件里然后调用: package adminimport ("net/http""git…...

FL Studio21.2中文版数字音乐制作软件
现在的FL也可以像splice一样啦,需要什么样的声音只需在fl里搜索,就会自动展示给你! FL Studio 简称FL,全称:Fruity Loops Studio,国人习惯叫它"水果"。软件现有版本是 FL Studio 21,已全面升级支…...

ELK 企业级日志分析系统 ELFK
目录 一、概述 二、组件介绍 2.1、ElasticSearch 2.2、Kiabana 2.3、Logstash 2.4、可以添加的其它组件:Filebeat 2.5、缓存/消息队列(redis、kafka、RabbitMQ等) 2.6、Fluentd 三、ELK工作原理 四、实例演示 1.ELK之 部署"E&q…...

IDEA中创建Java Web项目方法1
以下过程使用IntelliJ IDEA 2021.3 一、File-> New -> Project... 1. 项目类型中选择 Java Enterprise 项目 2. Name:填写自己的项目名称 3. Project template:选择项目的模板,Web application。支持JSP和Servlet的项目 4. Applica…...

源码:TMS FlexCel Studio for .NET 7.19
TMS FlexCel Studio for .NET 是100% 托管代码 Excel 文件操作引擎以及 Excel 和 PDF 报告生成,适用于 .NET、Xamarin.iOS、Xamarin.Android、Xamarin.Mac、Windows Phone 和 Windows Store 功能概述 使用 FlexCel Studio for .NET 创建可动态快速读写 Excel 文件的…...

多输入多输出 | MATLAB实现PSO-BP粒子群优化BP神经网络多输入多输出
多输入多输出 | MATLAB实现PSO-BP粒子群优化BP神经网络多输入多输出 目录 多输入多输出 | MATLAB实现PSO-BP粒子群优化BP神经网络多输入多输出预测效果基本介绍程序设计往期精彩参考资料 预测效果 基本介绍 Matlab实现PSO-BP粒子群优化BP神经网络多输入多输出预测 1.data为数据…...
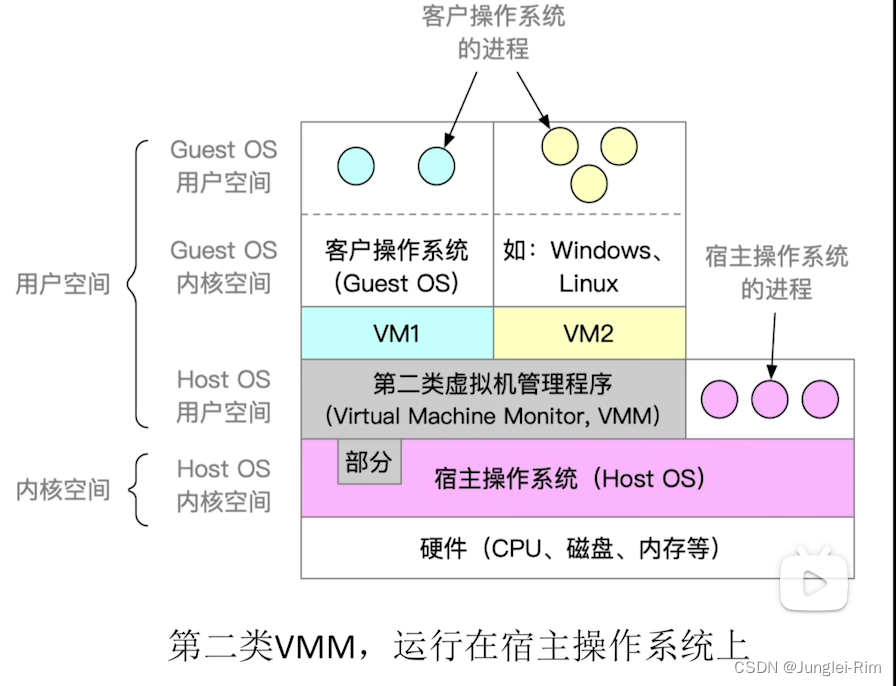
操作系统:系统引导以及虚拟机
1.操作系统引导的过程 ①CPU从一个特定主存地址开始取指令,执行ROM中的引导程序(先进行硬件自检,再开机)②将磁盘的第一块:主引导记录读入内存,执行磁盘引导程序,扫描分区表③从活动分区(又称主…...

AIGC绘本——海马搬家来喽
随着ChatGPT的快速发展,人工智能领域也发生了翻天覆地的变化。今天,我们迎合科技潮流,利用AIGC的强大能力,可以创作很多精彩的作品,比如这样一本名为《海马搬家》的绘本(注:此绘本根据同名儿童故…...
)
告别环境冲突!用Miniconda3在Windows上为不同Python项目创建独立开发环境(保姆级图文)
告别Python环境冲突:Miniconda3在Windows下的高效开发环境管理实战 刚接手新项目的Python开发者小王遇到了一个典型问题:本地运行良好的Django 3.2项目,在同事电脑上却频频报错。经过排查,发现是Python环境版本不一致导致的依赖冲…...
)
Perplexity历史资料搜索失效真相大起底(时间戳偏移、缓存策略与知识图谱断层深度解析)
更多请点击: https://intelliparadigm.com 第一章:Perplexity历史资料搜索失效真相大起底(时间戳偏移、缓存策略与知识图谱断层深度解析) Perplexity 的历史资料检索能力在近期高频出现“查无结果”或“返回过期摘要”现象&#…...

UrsPahoMqttClient 心跳问题解决指南——Paho 底层已自动处理,设好 KeepAlive 就行
UrsPahoMqttClient 心跳问题解决指南 ——Paho 底层已自动处理,设好 KeepAlive 就行 问题 用 UrsPahoMqttClient 做 MQTT 连接时,心跳 PingReq 报文怎么发送?目的是保持连接,防止被 Broker 踢下线。 结论 不需要手动发心跳&#x…...

某供应链企业200GB数据泄露复盘:如果开了透明加密,攻击者拿走的只有乱码
图:供应链企业数据泄露的3条典型路径(U盘导出/数据库导出/截图)与TDE透明加密的拦截机制事件还原:一次"完美"的内部数据窃取说明:以下事件基于多起真实安全事件综合脱敏处理,技术细节均为真实攻击…...

WechatRealFriends:微信好友关系检测终极方案深度解析
WechatRealFriends:微信好友关系检测终极方案深度解析 【免费下载链接】WechatRealFriends 微信好友关系一键检测,基于微信ipad协议,看看有没有朋友偷偷删掉或者拉黑你 项目地址: https://gitcode.com/gh_mirrors/we/WechatRealFriends …...
)
别再手动调position了!用MATLAB tiledlayout搞定双坐标轴图(R2019b+保姆级教程)
MATLAB双坐标轴绘图革命:tiledlayout全攻略 在科研绘图和工程可视化领域,双坐标轴图表是展示多维度数据的利器。传统MATLAB绘图方法需要手动计算position属性,代码冗长且难以维护。R2019b版本引入的tiledlayout功能彻底改变了这一局面&#x…...
)
告别环境冲突:用Conda+Docker在Win10上丝滑搭建MMDetection双环境(附CUDA 11.1/PyTorch 1.8配置)
深度学习环境工程化实践:Conda与Docker双方案打造MMDetection高效工作流 在Windows系统上搭建深度学习开发环境,就像在雷区跳舞——CUDA版本冲突、Python依赖不兼容、系统环境污染等问题随时可能引爆。以MMDetection为例,这个强大的目标检测工…...
)
别再手动调相机了!用CinemachineFreeLook快速搞定Unity第三人称视角(附完整配置流程)
告别繁琐调试:用CinemachineFreeLook打造专业级Unity第三人称视角 在游戏开发中,第三人称视角的实现往往让开发者头疼不已。传统的手动摄像机控制不仅需要编写大量代码来处理跟随、旋转和碰撞检测,还容易产生抖动、穿模等恼人的问题。而Unity…...

使用Taotoken聚合端点一个月,我的API调用延迟与稳定性观察记录
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Taotoken聚合端点一个月,我的API调用延迟与稳定性观察记录 1. 项目背景与接入动机 我最近的一个个人项目需要持续…...

通关NandGame组合电路后,我悟了:原来CPU设计的关键是“复用”与“延迟”
从NandGame看硬件设计的艺术:复用与延迟的哲学 在数字电路设计的浩瀚宇宙中,每一个逻辑门都如同星辰般微小却不可或缺。当我第一次接触NandGame时,本以为这不过是又一个教人拼凑逻辑门的普通教程,直到亲手搭建起第一个异或门&…...