驱动开发练习,platform实现如下功能
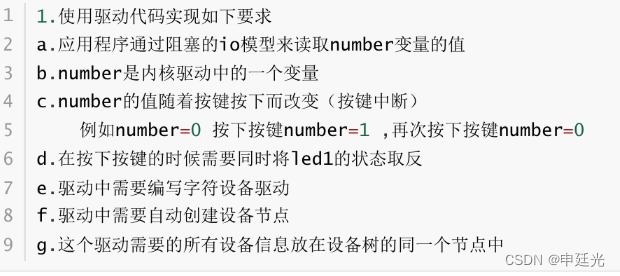
实验要求
驱动代码
#include <linux/init.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/mod_devicetable.h>
#include <linux/of_gpio.h>
#include <linux/unistd.h>
#include <linux/interrupt.h>
#include <linux/of_irq.h>
#include <linux/of.h>
#include <linux/cdev.h>
#include <linux/fs.h>
#include <linux/device.h>
#include <linux/uaccess.h>
#include <linux/slab.h>
#include <linux/wait.h>
#include <linux/string.h>
int i;
struct resource *res;
struct device_node *dnode;
unsigned int irqno[3];
unsigned int irqflag;
struct gpio_desc *gpiono[3];
unsigned char number;
struct cdev *cdev;
char kbuf[128] = {0};
unsigned int major = 0;
unsigned int minor = 0;
dev_t devno;
module_param(major, uint, 0664); // 方便在命令行传递major的值
struct class *cls;
struct device *dev;
unsigned int condition = 0;
// 定义一个等待队列头
wait_queue_head_t wq_head;
// 定义中断处理函数
irqreturn_t key_handler(int irq, void *dev)
{int which = (int)dev;if(number==0){number=1;kbuf[0]='1';}else{number=0;kbuf[0]='0';}switch (which){case 0:gpiod_set_value(gpiono[0], number); break;case 1:gpiod_set_value(gpiono[1], number);break;case 2:gpiod_set_value(gpiono[2], number);break;}condition = 1; // 表示硬件数据就绪wake_up_interruptible(&wq_head);return IRQ_HANDLED;
}
// 封装probe函数
int pdrv_probe(struct platform_device *pdev)
{res = platform_get_resource(pdev, IORESOURCE_MEM, 0);if (res == NULL){printk("获取men资源失败\n");return -ENXIO;}printk("mem资源%x\n", res->start);for (i = 0; i < 3; i++){irqno[0] = platform_get_irq(pdev, 0);}if (irqno[0] < 0){printk("获取中断类型资源失败\n");return -ENXIO;}printk("irq资源%d\n", irqno[0]);printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);// 设备树匹配成功后,设备树节点指针可以通过pdev->dev.of_node获取// 基于设备树节点信息获取gpio_desc对象指针gpiono[0] = gpiod_get_from_of_node(pdev->dev.of_node, "led1-gpio", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono)){printk("解析GPIO管脚信息失败\n");return -ENXIO;}gpiono[1] = gpiod_get_from_of_node(pdev->dev.of_node, "led2-gpio", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono)){printk("解析GPIO管脚信息失败\n");return -ENXIO;}gpiono[2] = gpiod_get_from_of_node(pdev->dev.of_node, "led3-gpio", 0, GPIOD_OUT_LOW, NULL);if (IS_ERR(gpiono)){printk("解析GPIO管脚信息失败\n");return -ENXIO;}return 0;
}
// 封装操作方法
int mycdev_open(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{int ret;// 判断IO方式if (file->f_flags & O_NONBLOCK) // 非阻塞{}else // 阻塞{wait_event_interruptible(wq_head, condition); // 先检查condition再将进程休眠}ret = copy_to_user(ubuf, kbuf, size);if (ret){printk("copy_to_user err\n");return -EIO;}condition = 0; // 下一次硬件数据没有就绪return 0;
}
// 定义操作方法结构体变量并赋值
struct file_operations fops = {.open = mycdev_open,.release = mycdev_close,.read = mycdev_read,
};
// 封装remvoe函数
int pdrv_remove(struct platform_device *pdev)
{// 释放GPIO信息for (i = 0; i < 3; i++){gpiod_put(gpiono[i]);}int i;for (i = 0; i < 3; i++){free_irq(irqno[i], (void *)i);}// 销毁设备文件// 注销驱动printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);return 0;
}
// 构建设备树匹配表
struct of_device_id oftable[] = {{.compatible = "hqyj,myplatform"},{},
};
// 定义驱动信息对象并初始化
struct platform_driver pdrv = {.probe = pdrv_probe,.remove = pdrv_remove,.driver = {.name = "ccccc",.of_match_table = oftable, // 用来设备树匹配},
};static int __init mycdev_init(void)
{// 注册platform_driver_register(&pdrv);// 解析按键的设备树节点dnode = of_find_compatible_node(NULL, NULL, "hqyj,myirq");if (dnode == NULL){printk("解析设备树节点失败\n");return -ENXIO;}printk("解析设备树节点成功\n");// 解析按键的软中断号int i;for (i = 0; i < 3; i++){irqno[i] = irq_of_parse_and_map(dnode, i);if (!irqno[i]){printk("解析按键1软中断号失败\n");return -ENXIO;}printk("解析按键软中断号成功%d\n", irqno[i]);// 注册 按键中断int ret = request_irq(irqno[i], key_handler, IRQF_TRIGGER_FALLING, "key_int", (void *)i);if (ret < 0){printk("注册按键中断失败\n");return ret;}}printk("注册按键中断成功\n");init_waitqueue_head(&wq_head);int ret;// 为字符设备驱动对象申请空间cdev = cdev_alloc();if (cdev == NULL){printk("字符设备驱动对象申请空间失败\n");ret = -EFAULT;goto out1;}printk("申请对象空间成功\n");// 初始化字符设备驱动对象cdev_init(cdev, &fops);// 申请设备号if (major > 0) // 静态指定设备号{ret = register_chrdev_region(MKDEV(major, minor), 3, "myled");if (ret){printk("静态申请设备号失败\n");goto out2;}}else if (major == 0) // 动态申请设备号{ret = alloc_chrdev_region(&devno, minor, 3, "myled");if (ret){printk("动态申请设备号失败\n");goto out2;}major = MAJOR(devno); // 获取主设备号minor = MINOR(devno); // 获取次设备号}printk("申请设备号成功\n");// 注册字符设备驱动对象ret = cdev_add(cdev, MKDEV(major, minor), 3);if (ret){printk("注册字符设备驱动对象失败\n");goto out3;}printk("注册字符设备驱动对象成功\n");// 向上提交目录信息cls = class_create(THIS_MODULE, "myled");if (IS_ERR(cls)){printk("向上提交目录失败\n");ret = -PTR_ERR(cls);goto out4;}printk("向上提交目录成功\n");// 向上提交设备节点信息for (i = 0; i < 3; i++){dev = device_create(cls, NULL, MKDEV(major, i), NULL, "myled%d", i);if (IS_ERR(dev)){printk("向上提交设备节点信息失败\n");ret = -PTR_ERR(dev);goto out5;}}printk("向上提交设备信息成功\n");return 0;
out5:// 释放前一次提交成功的设备信息for (--i; i >= 0; i--){device_destroy(cls, MKDEV(major, i));}class_destroy(cls); // 释放目录
out4:cdev_del(cdev);
out3:unregister_chrdev_region(MKDEV(major, minor), 3);
out2:kfree(cdev);
out1:return ret;return 0;
}
static void __exit mycdev_exit(void)
{// 注册platform_driver_unregister(&pdrv);
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");应用程序代码
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
#include <sys/ioctl.h>int main(int argc, char const *argv[])
{char buf[128] = {0};int fd = open("/dev/myled0", O_RDWR);if (fd < 0){printf("打开设备文件失败\n");exit(-1);}while (1){read(fd,buf,sizeof(buf));printf("%s\n",buf);}return 0;
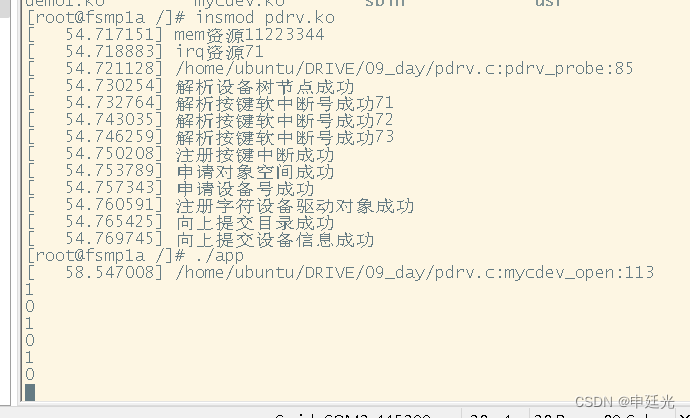
}实验现象

相关文章:
驱动开发练习,platform实现如下功能
实验要求 驱动代码 #include <linux/init.h> #include <linux/module.h> #include <linux/platform_device.h> #include <linux/mod_devicetable.h> #include <linux/of_gpio.h> #include <linux/unistd.h> #include <linux/interrupt…...

QT之QString的用法介绍
QT之QString的用法介绍 成员函数常见用法 成员函数 1)QString &append(const QString &str) 将 str 字符串追加到当前字符串末尾,并返回修改后的 QString 对象的引用。 2)QString &prepend(const QString &str) 将 str 字符…...

基于Java+SpringBoot+Vue3+Uniapp前后端分离考试学习一体机设计与实现2.0版本(视频讲解,已发布上线)
博主介绍:✌全网粉丝4W,全栈开发工程师,从事多年软件开发,在大厂呆过。持有软件中级、六级等证书。可提供微服务项目搭建与毕业项目实战,博主也曾写过优秀论文,查重率极低,在这方面有丰富的经验…...
springboot 获取参数
1.获取简单参数 2.实体对象参数...
【笔记】离线Ubuntu20.04+mysql 5.7.36 + xtrabackup定时增量备份脚本
一、环境 ● Ubuntu版本查看 lsb_release -a● mysql 版本查看 mysql --version我的是ubuntu 20.04,mysql是5.7.36,所以要用 install_percona-xtrabackup-24 二、原理 备份 通过ubuntu自带的定时器运行增量备份脚本备份文件可以存储在映射后的其他…...

树哈希与换根dp:CF763D
采用的树哈希函数是: d p x w x ∑ y ∈ x d p y 2 w x 2 \Large dp_xw_x\times \sum_{y\in x}dp_y^2w_x^2 dpxwxy∈x∑dpy2wx2 发现从 x x x 到 y y y 时只有 x x x 与 y y y 的哈希值会变化,分别维护即可 #include<bits/stdc.h&…...
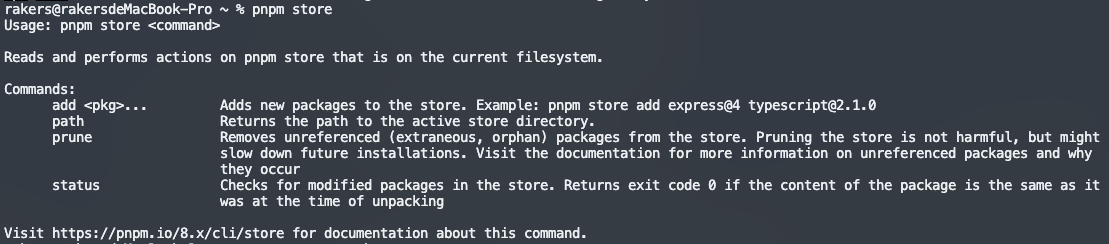
npm、yarn、pnpm如何清除缓存?
前端工程化创建项目会经常使用各种安装包管理工具,安装各种前端依赖包。例如,npm、yarn、pnpm等。时间一长,各种安装包管理工具的在安装依赖时,留下的缓存文件就会变得很大,以至于影响系统的运行,因此必要时…...

12款最火的AI画图软件,助你探索创新设计
ChatGPT火爆出圈,AI画图软件也如雨后春笋般流行起来。各类AI画图的软件工具横空出世,设计师与其焦虑工作会不会被人工智能取代,不如践行“工欲善其事必先利其器”,开拓思路,打开格局,好好地探索下如何利用好…...
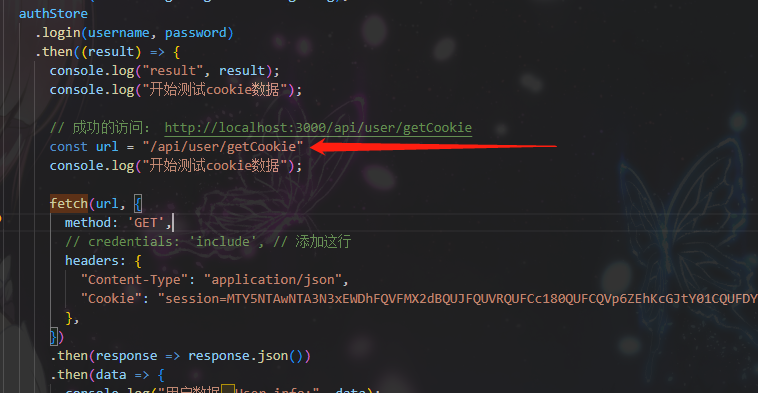
cookie信息无法获取问题研究
背景 在oneapi这个前后端都有的开源项目中,我想接入chatnextweb到oneapi的后端。 由于需要二开chatnextweb,添加登录注册功能,考虑到java后端的性能问题和内存占用,决定不重启写个服务,而是将登录注册接入到oneapi的…...
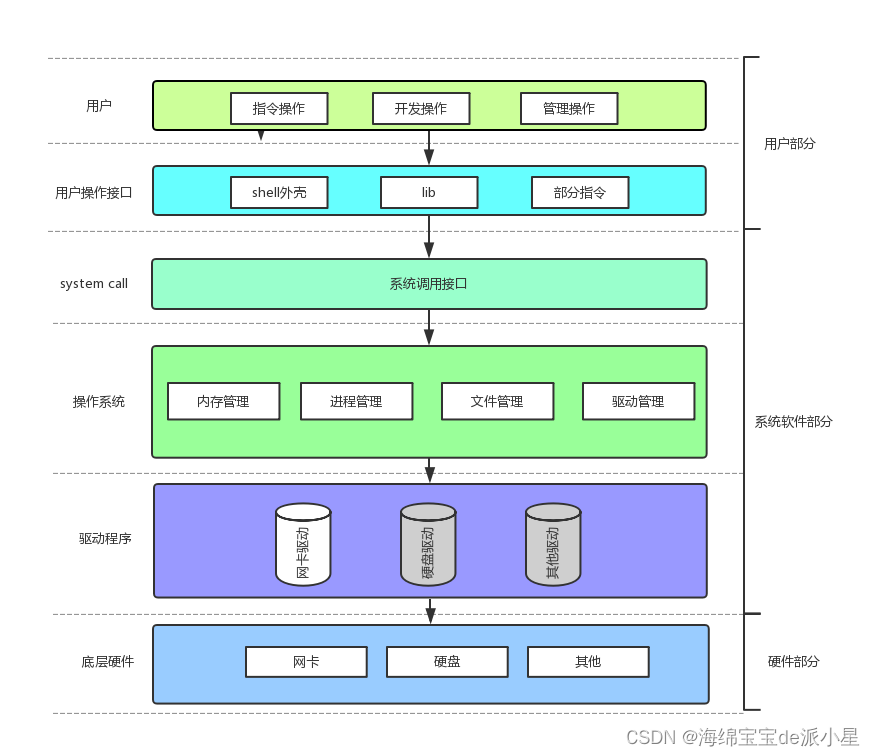
Linux:冯诺依曼系统和操作系统的概念
文章目录 冯诺依曼体系结构冯诺依曼体系的理解 操作系统操作系统的基本定位操作系统的理解1 操作系统的理解2总结 本篇主要总结的是操作系统的基本认知和一些概念 冯诺依曼体系结构 那么上图表示的就是冯诺依曼体系结构,那这个体系结构是什么?为什么要先…...
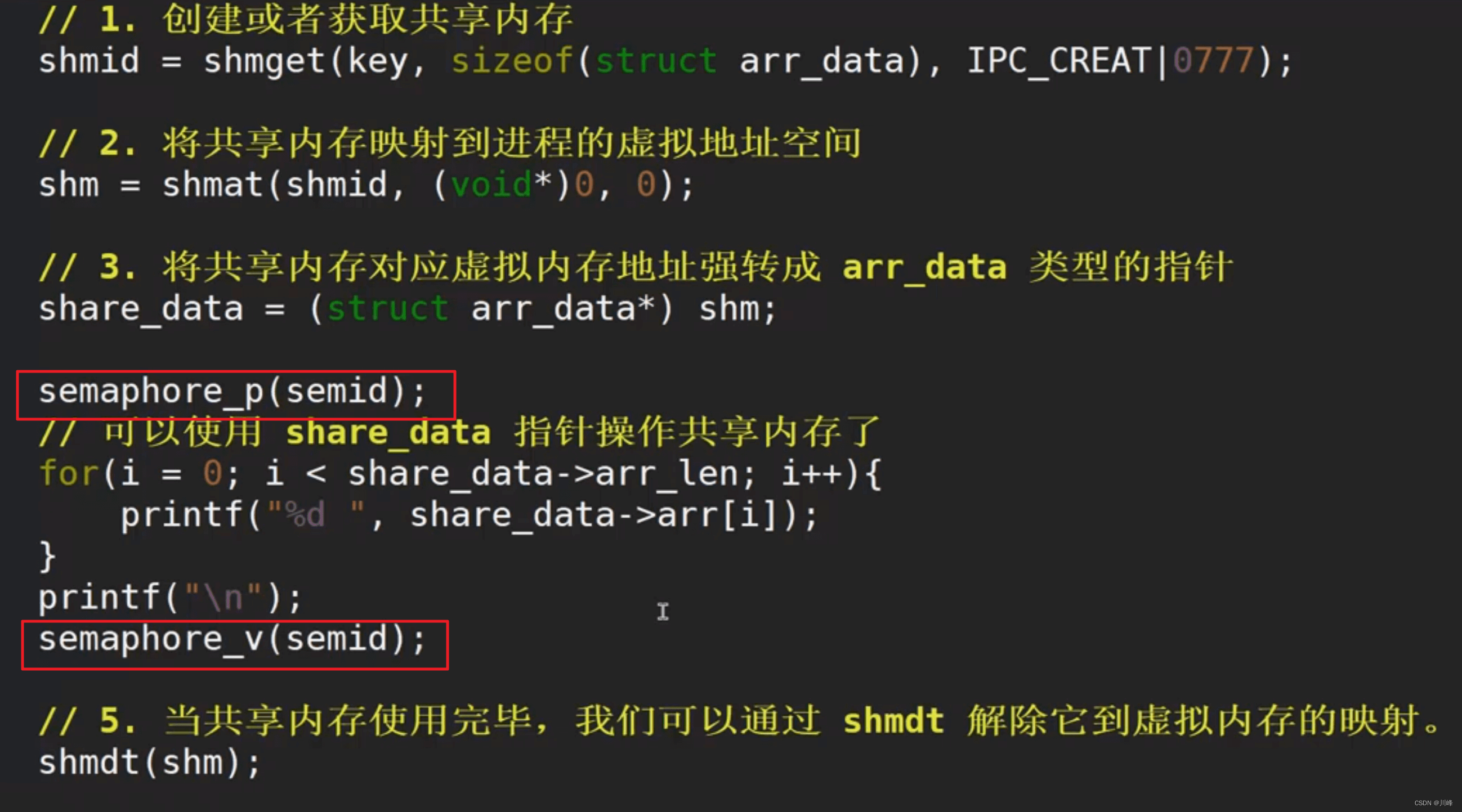
【操作系统笔记十一】进程间通信
Linux文件系统 inode 节点 (index node):给每个文件赋予一个称为 i 节点的数据结构。 inode 一开始是存储在硬盘中的,只有当文件被打开的时候,其对应的 i 节点才加载到内存中。 总结: Linux 中,…...

【操作系统】聊聊Linux软中断
什么是中断 中断是系统用来响应硬件设备请求的一种机制,会打断进程的正常调度和执行,转而去执行内核中的中断处理程序。 比如你正在看书,你女朋友叫你出去逛街。你就需要先放下手里的事情,然后逛街。回来之后,在接着看…...
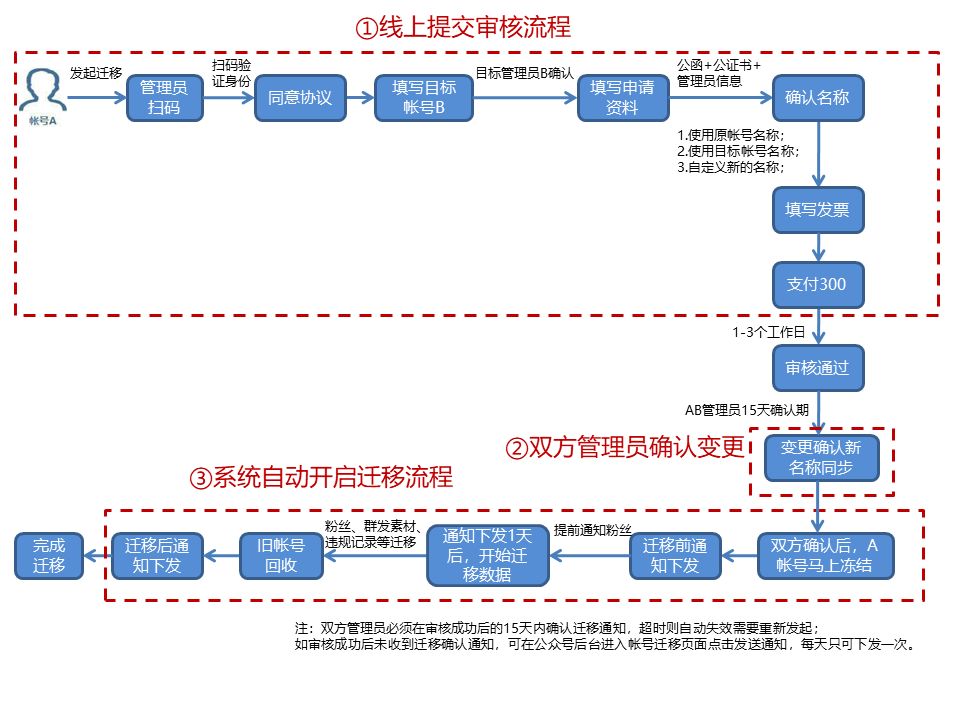
公众号迁移个人可以迁移吗?
公众号账号迁移的作用是什么?只能变更主体吗?很多小伙伴想做公众号迁移,但是不知道公众号迁移有什么作用,今天跟大家具体讲解一下。首先公众号迁移最主要的就是修改公众号的主体了,比如我们公众号原来是A公司的&#x…...
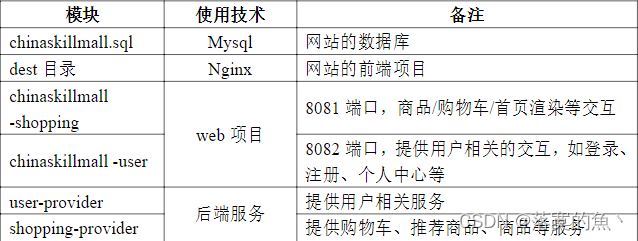
全国职业技能大赛云计算--高职组赛题卷⑤(容器云)
全国职业技能大赛云计算--高职组赛题卷⑤(容器云) 第二场次题目:容器云平台部署与运维任务2 基于容器的web应用系统部署任务(15分)任务3 基于容器的持续集成部署任务(15分)任务4 Kubernetes容器…...

支撑位和阻力位在Renko和烛台图如何使用?FPmarkets澳福3秒回答
很多投资者都知道,Renko图表和普通日本烛台都会采用相同的交易信号,即支撑位和阻力位。那么支撑位和阻力位在Renko和烛台图如何使用?FPmarkets澳福3秒回答。 这些信号在任何时间框架上都会出现,且在蜡烛图交易中颇受欢迎。对于Renko图表而言…...
如何在32位MCU用printf()函数打印64位数据
1. 在32位MCU上定义64位变量: unsigned long long time_base; unsigned long long temp_time;2. 调用打印函数: printf("RFID:time_base:%d\r\n",time_base); printf("RFID:temp_time:%d\r\n",temp_time); printf("RFID:Ru…...

Python爬虫程序设置代理常见错误代码及解决方法
Python爬虫程序设置代理是爬虫程序中常用的技巧,可以有效地绕过IP限制,提高爬虫程序的稳定性和效率。然而,在设置代理时,常会出现各种错误代码,这些错误代码可能会影响程序的正常运行,甚至导致程序崩溃。本…...

3D点云目标检测:Centerformer训练waymo数据集
一、环境准备 项目地址:centerformer 1.0、基础环境 python 3.8.0 torch 1.9.1cu111 waymo-open-dataset-tf-2-6-0 1.4.9 spconv 1.2.1 其余按照requirement.txt里安装就行 pip install -i https://pypi.tuna.tsinghua.edu.cn/simple -r requirements.txt由于我本人是在…...
火山引擎DataLeap推出两款大模型应用: 对话式检索与开发 打破代码语言屏障
更多技术交流、求职机会,欢迎关注字节跳动数据平台微信公众号,回复【1】进入官方交流群 自上世50年代,以“计算机”作为代表性象征的信息革命开始,社会对于先进生产力的认知便开始逐步更迭——从信息化(通常认为是把企…...
windows上配置vscode C/C++代码跳转
windows上配置vscode C/C代码跳转 安装插件 C/C 官方的 C/C 插件,必备的插件,是代码跳转、自动补全、代码大纲显示等功能的基础。 Gtags C/C GNU Global GNU Global除了安装该插件之外,还需要在本地下载安装GNU Global工具。多看下插件…...

为Claude Code配置Taotoken作为备用模型服务商
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为Claude Code配置Taotoken作为备用模型服务商 对于经常使用Claude Code进行编程辅助的开发者而言,直接依赖单一服务商…...

Camunda并行会签实战:从BPMN设计到数据库状态变化的完整追踪
Camunda并行会签实战:从BPMN设计到数据库状态变化的完整追踪 在复杂业务流程自动化领域,并行会签是一种常见但实现难度较高的模式。当三个部门主管需要同时审批一份采购申请时,传统串行审批会导致效率低下,而并行处理又面临状态同…...

完全掌握Visual C++运行库:从DLL缺失到系统稳定的全面解决方案
完全掌握Visual C运行库:从DLL缺失到系统稳定的全面解决方案 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 当您在Windows系统中运行游戏或专业软件…...
)
ATmega328P烧录Bootloader报错?别急着换芯片,可能是签名搞的鬼(附avrdude.conf修改教程)
ATmega328P烧录Bootloader报错?别急着换芯片,可能是签名搞的鬼(附avrdude.conf修改教程) 当你兴致勃勃地准备给新买的ATmega328P芯片烧录Bootloader时,突然弹出一串红色报错信息,那种心情就像煮熟的鸭子飞走…...

告别开机黑屏:搞懂UEFI、CSM和Secure Boot的‘三角关系’,装机不求人
现代计算机启动架构解密:UEFI、CSM与Secure Boot的协同与冲突 开机黑屏是许多DIY装机用户和技术爱好者常遇到的棘手问题。当新硬件遇上旧设备,或是现代系统需要兼容传统软件时,计算机的启动过程往往成为第一道技术壁垒。要真正理解这些兼容性…...

为内部工具集成大模型能力时如何选择与接入 Taotoken
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为内部工具集成大模型能力时如何选择与接入 Taotoken 在企业内部开发数据分析、客服助手、代码生成等工具时,引入大模型…...

按键精灵PC版和手机版到底怎么选?一篇讲清四大版本区别与核心开发流程
按键精灵四大版本深度解析:从需求匹配到高效开发的完整指南 在自动化工具领域,按键精灵凭借其跨平台支持和易用性,成为许多用户的首选。但面对官网提供的四个不同版本——电脑版、手机助手、安卓版和IOS版,不少新手用户会感到困惑…...

Nodejs后端服务集成Taotoken实现AI对话功能的具体配置指南
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Nodejs后端服务集成Taotoken实现AI对话功能的具体配置指南 1. 准备工作:获取API密钥与模型ID 在开始编写代码之前&…...

地平线6地图有哪些 地平线6可以在手机上玩吗
很多玩家都在关注地平线6地图的细节,想知道这款即将上线的竞速大作究竟有哪些可探索的场景,而地平线6地图的丰富度也直接决定了游戏的可玩性。不少玩家习惯用手机碎片时间想体验游戏,却受设备限制无法解锁地平线6地图的全部风光,这…...
)
保姆级教程:手把手解决CANoe 17.0在Win11系统上的安装失败问题(附临时文件夹清理方法)
CANoe 17.0在Windows 11系统安装全攻略:从权限配置到环境优化 当汽车电子工程师第一次在Windows 11系统上安装CANoe 17.0时,可能会遇到各种意想不到的障碍。不同于常见的软件安装过程,这款专业工具对系统环境有着更为严格的要求。本文将深入…...