二、C++项目:仿muduo库实现并发服务器之时间轮的设计
文章目录
- 一、为什么要设计时间轮?
- (一)简单的秒级定时任务实现:
- (二)Linux提供给我们的定时器:
- 1.原型
- 2.例子
- 二、时间轮
- (一)思想
- (一)代码
一、为什么要设计时间轮?
(一)简单的秒级定时任务实现:
在当前的高并发服务器中,我们不得不考虑⼀个问题,那就是连接的超时关闭问题。我们需要避免⼀个连接长时间不通信,但是也不关闭,空耗资源的情况。
这时候我们就需要⼀个定时任务,定时的将超时过期的连接进行释放。
(二)Linux提供给我们的定时器:
1.原型
#include <sys/timerfd.h>
int timerfd_create(int clockid, int flags);clockid: CLOCK_REALTIME-系统实时时间,如果修改了系统时间就会出问题; CLOCK_MONOTONIC-从开机到现在的时间是⼀种相对时间;flags: 0-默认阻塞属性int timerfd_settime(int fd, int flags, struct itimerspec *new, struct itimerspec *old);fd: timerfd_create返回的⽂件描述符flags: 0-相对时间, 1-绝对时间;默认设置为0即可.new: ⽤于设置定时器的新超时时间old: ⽤于接收原来的超时时间struct timespec {time_t tv_sec; /* Seconds */long tv_nsec; /* Nanoseconds */
};struct itimerspec {struct timespec it_interval; /* 第⼀次之后的超时间隔时间 */struct timespec it_value; /* 第⼀次超时时间 */
};
定时器会在每次超时时,⾃动给fd中写⼊8字节的数据,表⽰在上⼀次读取数据到当前读取数据期间超时了多少次。
2.例子
#include <iostream>
#include <cstdio>
#include <string>
#include <ctime>
#include <cstdlib>
#include <unistd.h>
#include <sys/timerfd.h>
#include <sys/select.h>
int main()
{
/*创建⼀个定时器 */
int timerfd = timerfd_create(CLOCK_MONOTONIC, 0);struct itimerspec itm;itm.it_value.tv_sec = 3;//设置第⼀次超时的时间itm.it_value.tv_nsec = 0;itm.it_interval.tv_sec = 3;//第⼀次超时后,每隔多⻓时间超时itm.it_interval.tv_nsec = 0;timerfd_settime(timerfd, 0, &itm, NULL);//启动定时器/*这个定时器描述符将每隔三秒都会触发⼀次可读事件*/time_t start = time(NULL);while(1) {uint64_t tmp;/*需要注意的是定时器超时后,则描述符触发可读事件,必须读取8字节的数据,保存的是⾃上*/int ret = read(timerfd, &tmp, sizeof(tmp));if (ret < 0) {return -1;}std::cout << tmp << " " << time(NULL) - start << std::endl;}close(timerfd);return 0;}
二、时间轮
(一)思想
上述的例子,存在⼀个很大的问题,每次超时都要将所有的连接遍历一遍,如果有上万个连接,效率无疑是较为低下的。
这时候大家就会想到,我们可以针对所有的连接,根据每个连接最近⼀次通信的系统时间建立⼀个小根堆,这样只需要每次针对堆顶部分的连接逐个释放,直到没有超时的连接为止,这样也可以大大提高处理的效率。
上述方法可以实现定时任务,但是这里给大家介绍另⼀种方案:时间轮
时间轮的思想来源于钟表,如果我们定了⼀个3点钟的闹铃,则当时针走到3的时候,就代表时间到了。
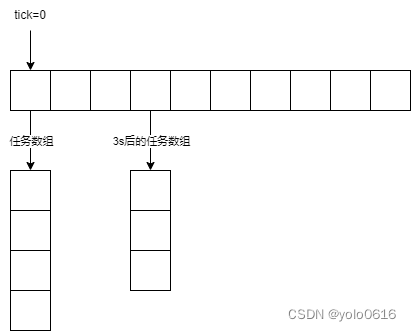
同样的道理,如果我们定义了一个数组,并且有一个指针,指向数组起始位置,这个指针每秒钟向后走动一步,走到哪里,则代表哪里的任务该被执行了,那么如果我们想要定一个3s后的任务,则只需要将任务添加到tick+3位置,则每秒中走一步,三秒钟后tick走到对应位置,这时候执行对应位置的任务即可。
但是,同一时间可能会有大批量的定时任务,因此我们可以给数组对应位置下拉一个数组,这样就可以在同一个时刻上添加多个定时任务了。
(一)代码
#include <iostream>
#include <list>
#include <vector>
#include <unordered_set>
#include <memory>
#include <cassert>
#include <unistd.h>
#include <functional>/*定时任务类*/
using TaskFunc = std::function<void()>;
// 它是一个使用 std::function 模板类实现的函数指针。
//这里的函数指针是指可以指向任意函数的指针类型,其参数类型为 void(),表示该函数不接受任何参数,返回类型为 void。
using ReleaseFunc = std::function<void()>; class TimeTask {private:uint64_t _id; // 定时器任务对象uint64_t _timeout; // 定时任务的超时时间bool _canceled; // false-表示没有被取消, true-表示被取消TaskFunc _task_cb; // 定时器对象要执行的定时任务ReleaseFunc _release; //用于删除TimerWheel中保存的定时器对象信息public:// 1.构造函数TimeTask(uint64_t id,uint32_t delay,const TaskFunc &cb) : _id(id),_timeout(delay),_task_cb(cb) {}// 2.析构函数~TimerTask() { if (_canceled == false) _task_cb(); _release(); }void Cancel() { _canceled = true; }void SetRelease(const ReleaseFunc &cb) { _release = cb; }uint32_t DelayTime() { return _timeout; }
};class TimeWheel {private:using WeakTask = std::weak_ptr<TimeTask>; // std::weak_ptr 是 C++11 标准库中引入的一种智能指针,// 它提供了对指针所指向对象的弱引用。当弱引用超出作用域或者对象被销毁时,// 智能指针会自动设置为 nullptr,从而避免了悬空指针(dangling pointer)的问题。using PtrTask = std::share_ptr<TimeTask>;std::vector<std::vector<PtrTask>> _wheel;int _tick; // 当前的秒针int _capacity; // 表盘最大数量 ——其实就是最大延迟时间std::unordered_map<uint64_t,WeakTask> _timers;private:void RomoveTimer(uint64_t id) {auto it = _timers.find(id);if (it != _timers.find(id)) {_timers.arase(it);}}public:Wheel() _capacity(60),_tick(0),_wheel(_capacity) {}}#include <iostream>
#include <vector>
#include <unordered_map>
#include <cstdint>
#include <functional>
#include <memory>
#include <unistd.h>using TaskFunc = std::function<void()>;
using ReleaseFunc = std::function<void()>;
class TimerTask{private:uint64_t _id; // 定时器任务对象IDuint32_t _timeout; //定时任务的超时时间bool _canceled; // false-表示没有被取消, true-表示被取消TaskFunc _task_cb; //定时器对象要执行的定时任务ReleaseFunc _release; //用于删除TimerWheel中保存的定时器对象信息public:TimerTask(uint64_t id, uint32_t delay, const TaskFunc &cb): _id(id), _timeout(delay), _task_cb(cb), _canceled(false) {}~TimerTask() { if (_canceled == false) _task_cb(); _release(); }void Cancel() { _canceled = true; }void SetRelease(const ReleaseFunc &cb) { _release = cb; }uint32_t DelayTime() { return _timeout; }
};class TimerWheel {private:using WeakTask = std::weak_ptr<TimerTask>;using PtrTask = std::shared_ptr<TimerTask>;int _tick; //当前的秒针,走到哪里释放哪里,释放哪里,就相当于执行哪里的任务int _capacity; //表盘最大数量---其实就是最大延迟时间std::vector<std::vector<PtrTask>> _wheel;std::unordered_map<uint64_t, WeakTask> _timers;private:void RemoveTimer(uint64_t id) {auto it = _timers.find(id);if (it != _timers.end()) {_timers.erase(it);}}public:TimerWheel():_capacity(60), _tick(0), _wheel(_capacity) {}void TimerAdd(uint64_t id, uint32_t delay, const TaskFunc &cb) {PtrTask pt(new TimerTask(id, delay, cb));pt->SetRelease(std::bind(&TimerWheel::RemoveTimer, this, id));int pos = (_tick + delay) % _capacity;_wheel[pos].push_back(pt);_timers[id] = WeakTask(pt);}//刷新/延迟定时任务void TimerRefresh(uint64_t id) {//通过保存的定时器对象的weak_ptr构造一个shared_ptr出来,添加到轮子中auto it = _timers.find(id);if (it == _timers.end()) {return;//没找着定时任务,没法刷新,没法延迟}PtrTask pt = it->second.lock();//lock获取weak_ptr管理的对象对应的shared_ptrint delay = pt->DelayTime();int pos = (_tick + delay) % _capacity;_wheel[pos].push_back(pt);}void TimerCancel(uint64_t id) {auto it = _timers.find(id);if (it == _timers.end()) {return;//没找着定时任务,没法刷新,没法延迟}PtrTask pt = it->second.lock();if (pt) pt->Cancel();}//这个函数应该每秒钟被执行一次,相当于秒针向后走了一步void RunTimerTask() {_tick = (_tick + 1) % _capacity;_wheel[_tick].clear();//清空指定位置的数组,就会把数组中保存的所有管理定时器对象的shared_ptr释放掉}
};class Test {public:Test() {std::cout << "构造" << std::endl;}~Test() {std::cout << "析构" << std::endl;}
};void DelTest(Test *t) {delete t;
}int main()
{TimerWheel tw;Test *t = new Test();tw.TimerAdd(888, 5, std::bind(DelTest, t));for(int i = 0; i < 5; i++) {sleep(1);tw.TimerRefresh(888);//刷新定时任务tw.RunTimerTask();//向后移动秒针std::cout << "刷新了一下定时任务,重新需要5s中后才会销毁\n";}tw.TimerCancel(888);while(1) {sleep(1);std::cout << "-------------------\n";tw.RunTimerTask();//向后移动秒针}return 0;
}
一个时间轮写的我都要痛苦死了。。。
呜呜呜呜谁能救救我。。。。。。。。
相关文章:
二、C++项目:仿muduo库实现并发服务器之时间轮的设计
文章目录 一、为什么要设计时间轮?(一)简单的秒级定时任务实现:(二)Linux提供给我们的定时器:1.原型2.例子 二、时间轮(一)思想(一)代码 一、为什…...

计算机竞赛 深度学习OCR中文识别 - opencv python
文章目录 0 前言1 课题背景2 实现效果3 文本区域检测网络-CTPN4 文本识别网络-CRNN5 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 **基于深度学习OCR中文识别系统 ** 该项目较为新颖,适合作为竞赛课题方向,…...

蓝桥等考Python组别五级003
第一部分:选择题 1、Python L5 (15分) 表达式“a >= b”等价于下面哪个表达式?( ) a > b and a == ba > b or a == ba < b and a == ba < b or a > b正确答案:B 2、Python L5 (15分) 当x是偶数时,下面哪个表达式的值一定是True?( …...
学之思项目第一天-完成项目搭建
一、前端 拉下前端代码执行 npm i 然后执行npm run serve就行了 二、后端 搭建父子模块 因为这个涉及到前台以及后台管理所以使用父子模块 并且放置一个公共模块,放置公共的依赖以及公共的代码 2.1 搭建父子工程 这个可以使用直接一个个的maven模块ÿ…...

pandas--->CSV / JSON
csv CSV(Comma-Separated Values,逗号分隔值,有时也称为字符分隔值,因为分隔字符也可以不是逗号),其文件以纯文本形式存储表格数据(数字和文本)。 CSV 是一种通用的、相对简单的文…...

LeetCode算法二叉树—116. 填充每个节点的下一个右侧节点指针
目录 116. 填充每个节点的下一个右侧节点指针 题解: 代码: 运行结果: 给定一个 完美二叉树 ,其所有叶子节点都在同一层,每个父节点都有两个子节点。二叉树定义如下: struct Node {int val;Node *left;N…...
二、2023.9.28.C++基础endC++内存end.2
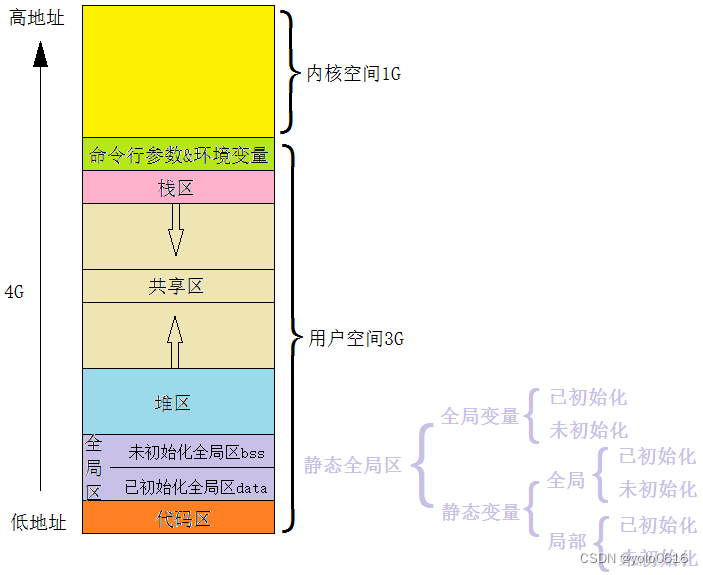
文章目录 17、说说new和malloc的区别,各自底层实现原理。18、 说说const和define的区别。19、 说说C中函数指针和指针函数的区别?20、 说说const int *a, int const *a, const int a, int *const a, const int *const a分别是什么,有什么特点…...
DevSecOps 将会嵌入 DevOps
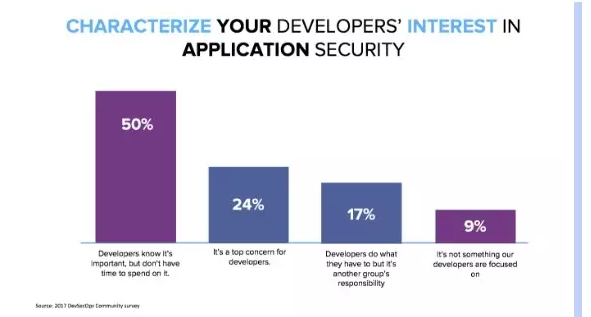
通常人们在一个项目行将结束时才会考虑到安全,这么做会导致很多问题;将安全融入到DevOps的工作流中已产生了积极结果。 DevSecOps:安全正当时 一直以来,开发人员在构建软件时认为功能需求优先于安全。虽然安全编码实践起着重要作…...

不同管径地下管线的地质雷达响应特征分析
不同管径地下管线的地质雷达响应特征分析 前言 以混凝土管线为例,建立了不同管径的城市地下管线模型,进行二维地质雷达正演模拟,分析不同管径管线的地质雷达响应特征。 文章目录 不同管径地下管线的地质雷达响应特征分析前言1、管径50cm2、…...

【接口测试学习】白盒测试 接口测试 自动化测试
一、什么是白盒测试 白盒测试是一种测试策略,这种策略允许我们检查程序的内部结构,对程序的逻辑结构进行检查,从中获取测试数据。白盒测试的对象基本是源程序,所以它又称为结构测试或逻辑驱动测试,白盒测试方法一般分为…...
7.网络原理之TCP_IP(下)
文章目录 4.传输层重点协议4.1TCP协议4.1.1TCP协议段格式4.1.2TCP原理4.1.2.1确认应答机制 ACK(安全机制)4.1.2.2超时重传机制(安全机制)4.1.2.3连接管理机制(安全机制)4.1.2.4滑动窗口(效率机制…...
Docker Dockerfile解析
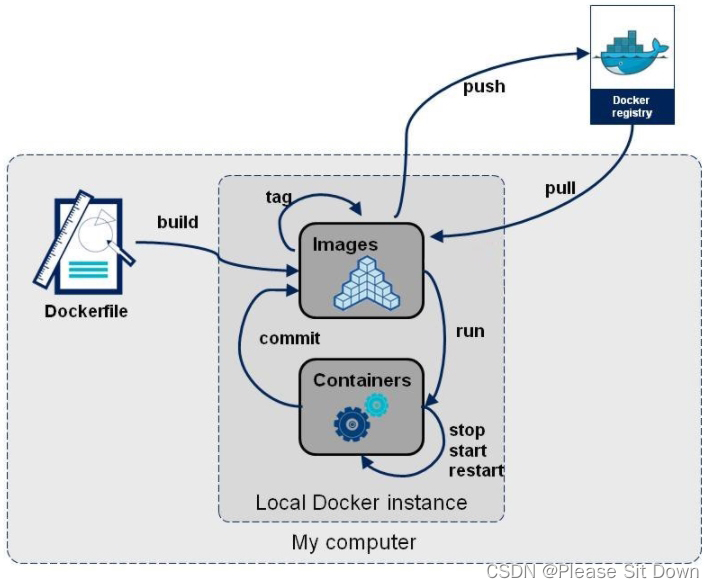
Dockerfile是什么 Dockerfile是用来构建Docker镜像的文本文件,是由一条条构建镜像所需的指令和参数构成的脚本。 官网:Dockerfile reference | Docker Docs 构建三步骤: 编写Dockerfile文件docker build命令构建镜像docker run依镜像运行容…...
浏览器从输入URL到页面展示这个过程中都经历了什么
一. URL输入 URL是统一资源定位符,用于定位互联网上的资源,俗称网址。我们在地址栏输入网址后敲下回车,浏览器会对输入的信息进行以下判断: 1. 检查输入的内容是否是一个合法的URL连接 2. 如果合法的话,则会判断URL…...

2023-09-22 monetdb-事务管理-乐观并发控制-记录
摘要: 2023-09-22 monetdb-事务管理-记录 相关文档: Transaction Management | MonetDB Docs https://en.wikipedia.org/wiki/Optimistic_concurrency_control monetdb事务管理: MonetDB/SQL 支持以 START TRANSACTION 标记并以 COMMIT 或 ROLLBACK 关闭的多语句事务方案。如果…...

蓝桥等考Python组别四级008
第一部分:选择题 1、Python L4 (15分) 字符“D”的ASCII码值比字符“F”的ASCII码值小( )。 1234正确答案:B 2、Python L4 (15分) 下面的Python变量名正…...

SpringMVC 学习(二)Hello SpringMVC
3. Hello SpringMVC (1) 新建 maven 模块 springmvc-02-hellomvc (2) 确认依赖的导入 (3) 配置 web.xml <!--web/WEB-INF/web.xml--> <?xml version"1.0" encoding"UTF-8"?> <web-app xmlns"http://xmlns.jcp.org/xml/ns/javaee…...
交换机之间配置手动|静态链路聚合
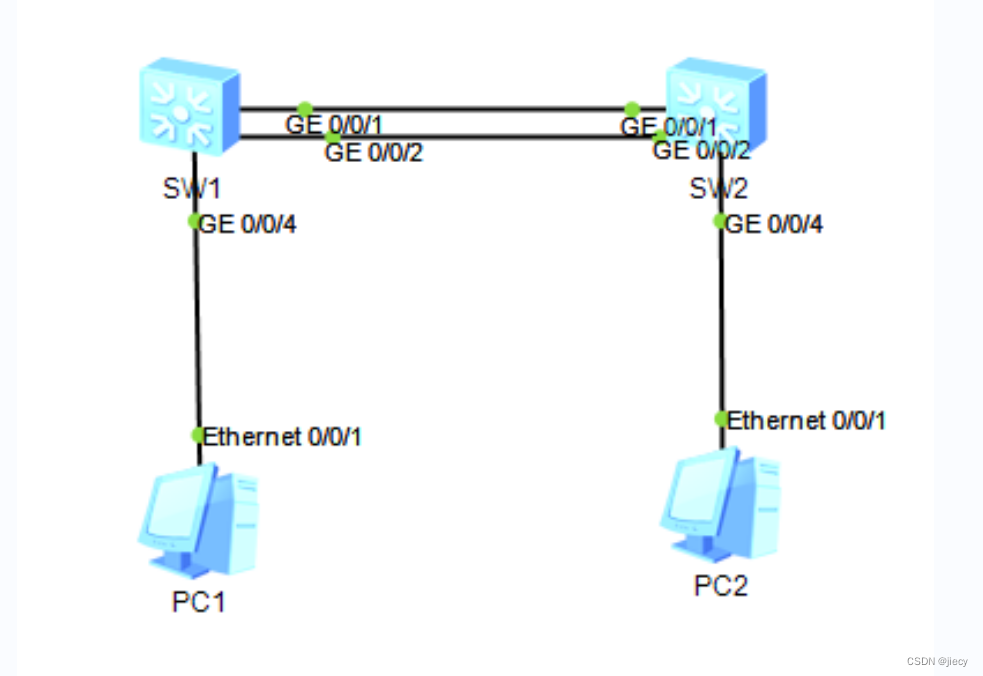
两台交换机,配置链路聚合: 1、禁止自动协商速率,配置固定速率 int G0/0/1 undo negotiation auto speed 100int G0/0/2 undo negotiation auto speed 100 2、配置eth-trunk int eth-trunk 1 mode manual | lacp-staticint G0/0/1 eth-trun…...

Shiro高级及SaaS-HRM的认证授权
Shiro在SpringBoot工程的应用 Apache Shiro是一个功能强大、灵活的,开源的安全框架。它可以干净利落地处理身份验证、授权、企业会话管理和加密。越来越多的企业使用Shiro作为项目的安全框架,保证项目的平稳运行。 在之前的讲解中只是单独的使用shiro&…...
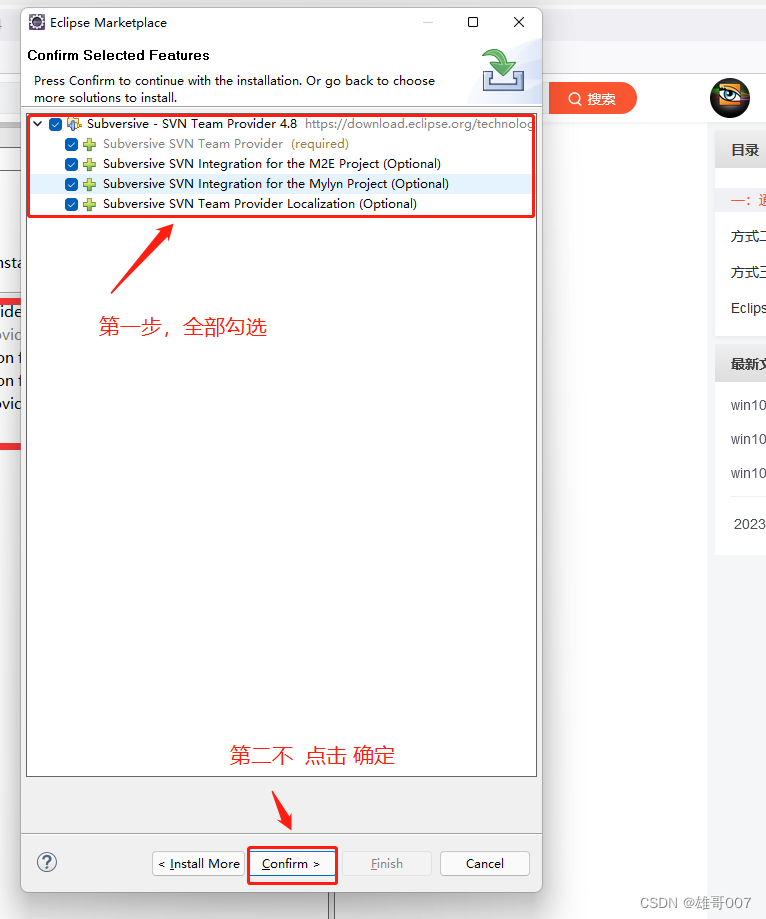
eclipse svn插件安装
1.进入eclipse的help->Eclipse Marketplace,如下图所示: 2.输入“svn”,再按回车,如下图: 3.这我选择的是 Subversive,点击后面的“install”按钮,如下图 Eclipse 下连接 SVN 库有两种插件 —— Subclipse 与 Subversive &…...

C语言 cortex-A7核 UART总线 实验
一、C 1)uart4.h #ifndef __UART4_H__ #define __UART4_H__ #include "stm32mp1xx_rcc.h" #include "stm32mp1xx_gpio.h" #include "stm32mp1xx_uart.h&quo…...

T型翼/尾板导向的穿浪双体船姿态控制【附代码】
✨ 长期致力于穿浪双体船、T型翼、尾板、多自由度姿态控制、舒适性评估研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)动态水翼升力模型与耦合运动方…...

PentestGPT实战部署指南:AI驱动的渗透测试工作流落地
1. 这不是另一个“AI安全”的概念玩具,而是一套能真正跑起来的渗透测试辅助工作流“PentestGPT”这个名字刚在GitHub上出现时,我第一反应是点开又关掉——过去三年里,我见过太多打着“AI渗透”旗号的项目:有的只是把ChatGPT API封…...

Unity发行版DLL调试实战:DnSpy无源码IL级断点指南
1. 这不是“反编译”,而是Unity游戏开发者的日常调试手段你有没有遇到过这样的情况:接手一个Unity发行版游戏,想快速验证某个功能逻辑是否按预期执行,或者排查一个偶发的崩溃,但手头只有打包后的Assembly-CSharp.dll&a…...

SMUDebugTool终极指南:如何深度掌控AMD Ryzen处理器的隐藏性能
SMUDebugTool终极指南:如何深度掌控AMD Ryzen处理器的隐藏性能 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: ht…...

skills CANN开源社区贡献技能包开发指南
前言 开源社区的健康运转,不仅依赖核心代码的贡献,还需要降低贡献门槛、提供清晰的指南和自动化工具。skills仓库是CANN开源社区的"贡献技能包",提供了一系列辅助脚本、代码模板、CI检查和文档生成工具,帮助新手快速上…...

LizzieYzy:你的智能围棋教练,让AI分析变得简单有趣 [特殊字符]
LizzieYzy:你的智能围棋教练,让AI分析变得简单有趣 🎯 【免费下载链接】lizzieyzy LizzieYzy - GUI for Game of Go 项目地址: https://gitcode.com/gh_mirrors/li/lizzieyzy 还在为复盘找不到关键点而烦恼吗?想提升棋力却…...

破解材料数据荒:合成数据与随机森林预测聚合物阻燃性能
1. 项目概述与核心挑战在材料研发领域,尤其是涉及公共安全的聚合物阻燃性研究,传统实验方法正面临巨大瓶颈。想象一下,你是一位材料工程师,需要设计一种用于高铁内饰或高层建筑电缆护套的新型聚合物,其阻燃性能必须满足…...

武汉国电华美16875kVA串联谐振试验装置,这手活儿细
在超高压变电站和长距离电缆的现场,交流耐压试验是检验设备绝缘的“最后一关”。这位老师傅经手过不少大工程,他说,面对GIS、大型变压器这些“大块头”电容性试品,能不能顺利“过关”,往往就看串联谐振装置顶不顶得住。…...

在模型广场灵活选型让我找到了更适合代码生成的Taotoken模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在模型广场灵活选型让我找到了更适合代码生成的Taotoken模型 开发代码辅助工具时,选择合适的模型是平衡效果与成本的关…...
【php语法学习,iscc校赛wp】)
学习日志(三)【php语法学习,iscc校赛wp】
1. 任务 1.1.1.1.1.1. 知识部分 rce看【之前的笔记?】php的知识点学习继续jwt token好像是比赛的题目考察内容,我看看php伪协议 1.1.1.1.1.2. 题目 参加iscc比赛【五一】rce题目 1.1.1.1.1.3. 环境配置 把vscode搞好,上学期没有把Php配…...