IntelliJ IDEA 常用快捷键一览表
目录
1-IDEA的日常快捷键
第1组:通用型
第2组:提高编写速度(上)
第3组:提高编写速度(下)
第4组:类结构、查找和查看源码
第5组:查找、替换与关闭
第6组:调整格式
2-Debug快捷键
1-IDEA的日常快捷键
第1组:通用型
| 说明 | 快捷键 |
|---|---|
| 复制代码-copy | ctrl + c |
| 粘贴-paste | ctrl + v |
| 剪切-cut | ctrl + x |
| 撤销-undo | ctrl + z |
| 反撤销-redo | ctrl + shift + z |
| 保存-save all | ctrl + s |
| 全选-select all | ctrl + a |
第2组:提高编写速度(上)
| 说明 | 快捷键 |
|---|---|
| 智能提示-edit | alt + enter |
| 提示代码模板-insert live template | ctrl+j |
| 使用xx块环绕-surround with ... | ctrl+alt+t |
| 调出生成getter/setter/构造器等结构-generate ... | alt+insert |
| 自动生成返回值变量-introduce variable ... | ctrl+alt+v |
| 复制指定行的代码-duplicate line or selection | ctrl+d |
| 删除指定行的代码-delete line | ctrl+y |
| 切换到下一行代码空位-start new line | shift + enter |
| 切换到上一行代码空位-start new line before current | ctrl +alt+ enter |
| 向上移动代码-move statement up | ctrl+shift+↑ |
| 向下移动代码-move statement down | ctrl+shift+↓ |
| 向上移动一行-move line up | alt+shift+↑ |
| 向下移动一行-move line down | alt+shift+↓ |
| 方法的形参列表提醒-parameter info | ctrl+p |
第3组:提高编写速度(下)
| 说明 | 快捷键 |
|---|---|
| 批量修改指定的变量名、方法名、类名等-rename | shift+f6 |
| 抽取代码重构方法-extract method ... | ctrl+alt+m |
| 重写父类的方法-override methods ... | ctrl+o |
| 实现接口的方法-implements methods ... | ctrl+i |
| 选中的结构的大小写的切换-toggle case | ctrl+shift+u |
| 批量导包-optimize imports | ctrl+alt+o |
第4组:类结构、查找和查看源码
| 说明 | 快捷键 |
|---|---|
| 如何查看源码-go to class... | ctrl + 选中指定的结构 或 ctrl+n |
| 显示当前类结构,支持搜索指定的方法、属性等-file structure | ctrl+f12 |
| 退回到前一个编辑的页面-back | ctrl+alt+← |
| 进入到下一个编辑的页面-forward | ctrl+alt+→ |
| 打开的类文件之间切换-select previous/next tab | alt+←/→ |
| 光标选中指定的类,查看继承树结构-Type Hierarchy | ctrl+h |
| 查看方法文档-quick documentation | ctrl+q |
| 类的UML关系图-show uml popup | ctrl+alt+u |
| 定位某行-go to line/column | ctrl+g |
| 回溯变量或方法的来源-go to implementation(s) | ctrl+alt+b |
| 折叠方法实现-collapse all | ctrl+shift+ - |
| 展开方法实现-expand all | ctrl+shift+ + |
第5组:查找、替换与关闭
| 说明 | 快捷键 |
|---|---|
| 查找指定的结构 | ctlr+f |
| 快速查找:选中的Word快速定位到下一个-find next | ctrl+l |
| 查找与替换-replace | ctrl+r |
| 直接定位到当前行的首位-move caret to line start | home |
| 直接定位到当前行的末位 -move caret to line end | end |
| 查询当前元素在当前文件中的引用,然后按 F3 可以选择 | ctrl+f7 |
| 全项目搜索文本-find in path ... | ctrl+shift+f |
| 关闭当前窗口-close | ctrl+f4 |
第6组:调整格式
| 说明 | 快捷键 |
|---|---|
| 格式化代码-reformat code | ctrl+alt+l |
| 使用单行注释-comment with line comment | ctrl + / |
| 使用/取消多行注释-comment with block comment | ctrl + shift + / |
| 选中数行,整体往后移动-tab | tab |
| 选中数行,整体往前移动-prev tab | shift + tab |
2-Debug快捷键
| 说明 | 快捷键 |
|---|---|
| 单步调试(不进入函数内部)- step over | F8 |
| 单步调试(进入函数内部)- step into | F7 |
| 强制单步调试(进入函数内部) - force step into | alt+shift+f7 |
| 选择要进入的函数 - smart step into | shift + F7 |
| 跳出函数 - step out | shift + F8 |
| 运行到断点 - run to cursor | alt + F9 |
| 继续执行,进入下一个断点或执行完程序 - resume program | F9 |
| 停止 - stop | Ctrl+F2 |
| 查看断点 - view breakpoints | Ctrl+Shift+F8 |
| 关闭 - close | Ctrl+F4 |
相关文章:

IntelliJ IDEA 常用快捷键一览表
目录 1-IDEA的日常快捷键 第1组:通用型 第2组:提高编写速度(上) 第3组:提高编写速度(下) 第4组:类结构、查找和查看源码 第5组:查找、替换与关闭 第6组:…...
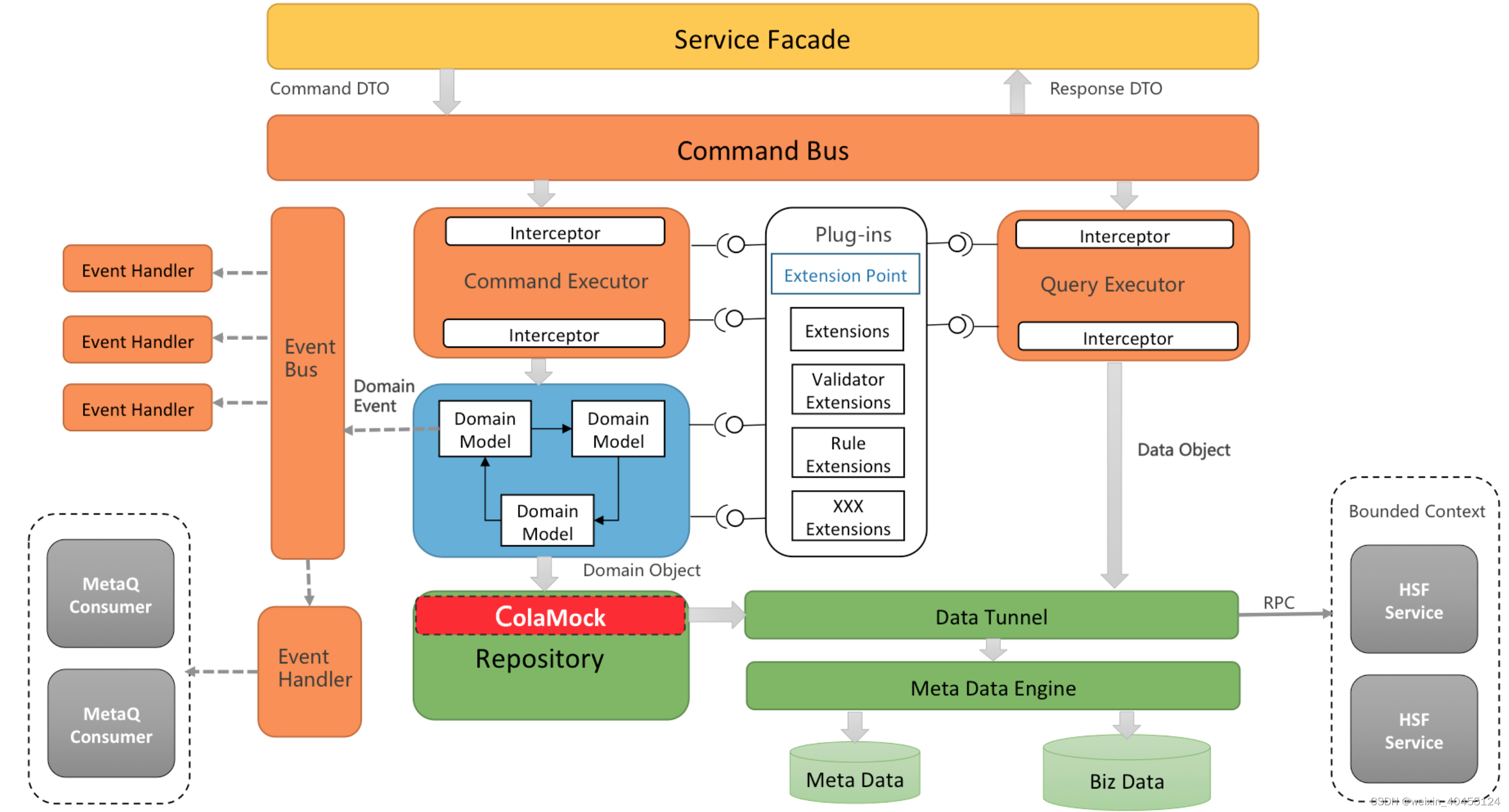
cola 架构简单记录
cola 是来自张建飞(Frank)的偏实现的技术架构,里面的业务身份和扩展点也被MEAF引用,cola本身由java 实现、但其实可以是一种企业通用的技术架构。 业务身份来源 https://blog.csdn.net/significantfrank/article/details/8578556…...

FFmpeg常用结构体分析
目录 1.AVFormatConext 2.AVInputFormat 3.AVStream 4.AVCodecContext 5.AVPacket 6.AVCodec 7.AVFrame 8.AVIOContext 9.URLProtocol 10.URLContext 1.AVFormatConext AVFormatConext是一个贯穿全局地数据结构,AVFormatConext结构包含很多信息,…...

ChatGPT 学习笔记 | 什么是 Prompt-tuning?
文章目录 一、前言二、主要内容三、总结 🍉 CSDN 叶庭云:https://yetingyun.blog.csdn.net/ 一、前言 Prompt-tuning is an efficient, low-cost way of adapting an AI foundation model to new downstream tasks without retraining the model and upd…...

[红明谷CTF 2021]write_shell %09绕过过滤空格 ``执行
目录 1.正常短标签 2.短标签配合内联执行 看看代码 <?php error_reporting(0); highlight_file(__FILE__); function check($input){if(preg_match("/| |_|php|;|~|\\^|\\|eval|{|}/i",$input)){ 过滤了 木马类型的东西// if(preg_match("/| |_||php/&quo…...

JVM学习笔记
JVM学习笔记 复习之前学的内容,同时补充以下知识点:JVM的双亲委派机制、伊甸区与老年代相关知识; 双亲委派机制 首先介绍Java中的类加载器 Java中的类加载器 Bootstrap ClassLoader(启动类加载器),默认…...

使用 gst-element-maker 创建一个完全透传的 videofilter 插件
系列文章目录 创建 gstreamer 插件的几种方式 使用 gst-template 创建自己的 gstreamer 插件 使用 gst-plugins-bad 里面的 gst-element-maker 工具创建gstreamer 插件 使用 gst-element-maker 创建一个完全透传的 videofilter 插件 文章目录 系列文章目录前言一、使用gst-ele…...
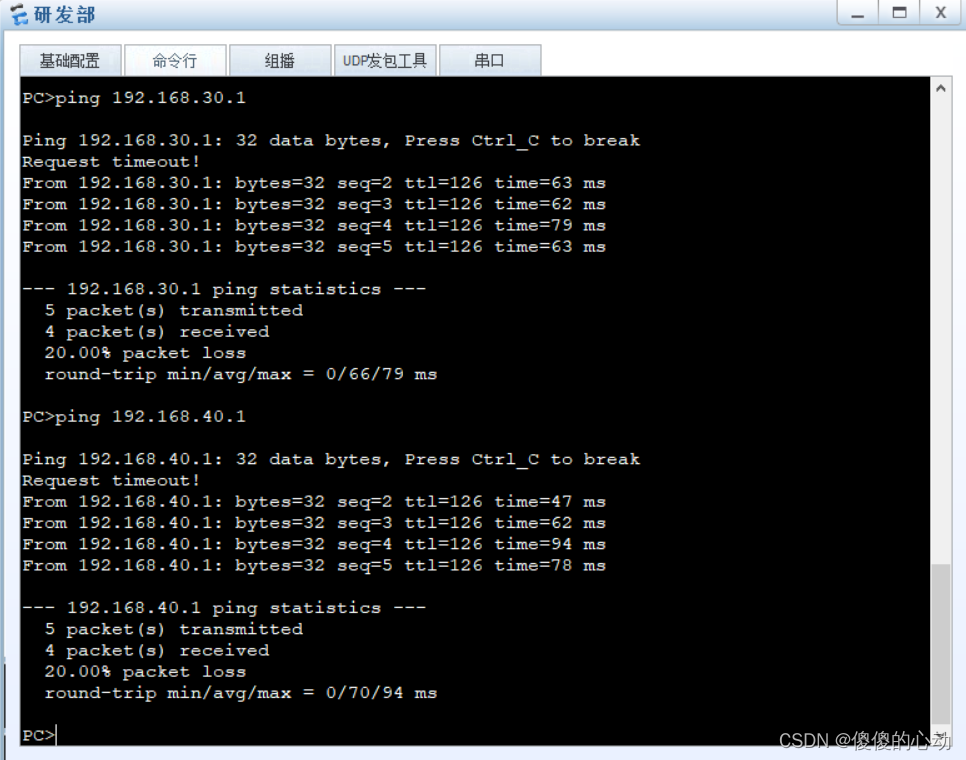
华为ensp单臂路由及OSPF实验
单臂路由及OSPF实验 1.1实验背景 在这个实验中,我们模拟了一个复杂的网络环境,该网络环境包括多个子网和交换机。这个实验旨在帮助网络工程师和管理员了解如何配置单臂路由和使用开放最短路径优先(OSPF)协议来实现不同子网之间的…...
Android LiveData 介绍
Android LiveData 介绍 系列文章目录前言一、LiveData是什么?二、简单使用依赖测试数据准备1.创建可观察的livedata2.观察它3.更新它 总结 系列文章目录 Android LiveData 介绍(本文) 前言 本系列根据官网介绍Jetpack中的数据通信组件&…...

好看的货架效果(含3D效果)
搭配thymeleaf layui合成 货架一 1. css #gudinghuojia2F .layui-row { display: flex; justify-content: space-between; height: 100%;} #gudinghuojia2F .layui-col-xs10 {margin-right: 4%;} #gudinghuojia2F .layui-col-xs10:last-child {margin-right: 0;} .inner-ti…...

【每日一题】1498. 满足条件的子序列数目
1498. 满足条件的子序列数目 - 力扣(LeetCode) 给你一个整数数组 nums 和一个整数 target 。 请你统计并返回 nums 中能满足其最小元素与最大元素的 和 小于或等于 target 的 非空 子序列的数目。 由于答案可能很大,请将结果对 109 7 取余后…...

Go语言数据类型实例讲解 - Go语言从入门到实战
Go语言数据类型实例讲解 - Go语言从入门到实战 基础数据类型 bool string int int8 int16 int32 int64 uint uint8 uint16 uint32 uint64 uintptr byte rune float32 float64 complex64 complex128类型描述bool布尔型(bool):可以是true或f…...

RocketMQ 事务消息发送
目录 事务消息介绍 应用场景 功能原理 使用限制 使用示例 使用建议 事务消息介绍 在一些对数据一致性有强需求的场景,可以用 RocketMQ 事务消息来解决,从而保证上下游数据的一致性。 应用场景 分布式事务的诉求 分布式系统调用的特点为一个核…...

后端-POST请求中只需要两个参数,后端不想创建对象时
问题: 在前后端对接中,很多前端的规范是POST,参数放body里面,媒体类型是json,后端就需要用RequestBody去接收,但是后端只用接收两个对象,这时候后端不想创建对象,使用RequestParm&a…...
UG\NX二次开发 通过点云生成曲面 UF_MODL_create_surf_from_cloud
文章作者:里海 来源网站:《里海NX二次开发3000例专栏》 感谢粉丝订阅 感谢 Rlgun 订阅本专栏,非常感谢。 简介 有网友想做一个通过点云生成曲面的程序,我们也试一下 效果 代码 #include "me.hpp" /*HEAD CREATE_SURF_FROM_CLOUD CCC UFUN */...
Linux常用指令(二)
目录 一、 删除空目录(rmdir) 二、ln 硬链接与软链接 三、新建空文件或更新文件的时间戳(touch) 四、比较文件内容的差异(diff) 五、显示当前时间或设置系统时间(date) 六、显…...
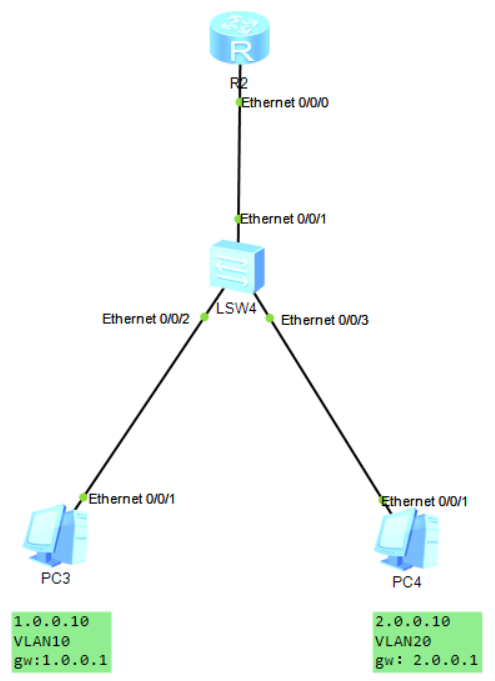
【HUAWEI】单臂路由
目录 🥮写在前面 🥮2.1、拓扑图 🥮2.2、操作思路 🥮2.3、配置操作 🍣2.3.1、LSW4配置 🍣2.3.2、R2配置 🍣2.3.3、测试网络 🦐博客主页:大虾好吃吗的博客 &…...
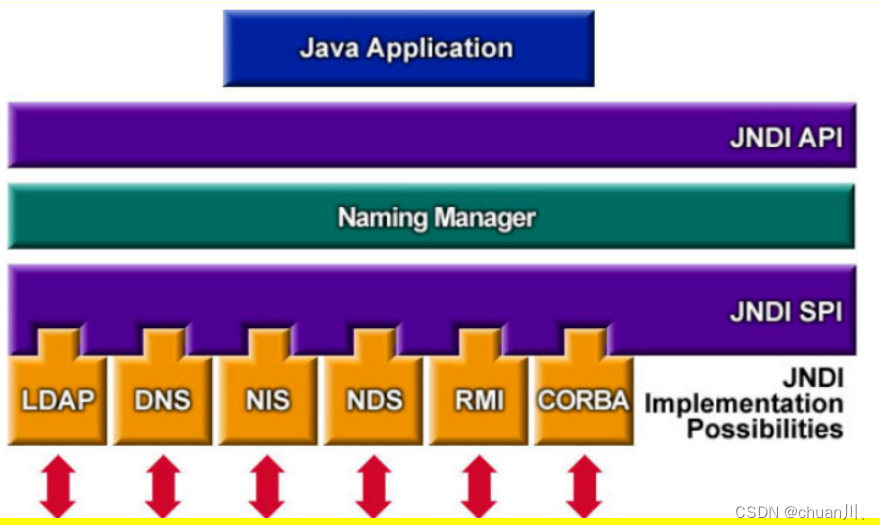
安全学习_开发相关_Java第三方组件Log4jFastJSON及相关安全问题简介
文章目录 JNDI:(见图) Java-三方组件-Log4J&JNDILog4J:Log4j-组件安全复现使用Log4j Java-三方组件-FastJsonFastJson:Fastjson-组件安全复现对象转Json(带类型)Json转对象Fastjson漏洞复现(大佬文章 JNDI:(见图) …...
零代码编程:用ChatGPT批量自动下载archive.org上的音频书
http://archive.org 是一个神奇的网站,可以下载各种古旧的软件、书籍、音频、视频,还可以搜索各个网站的历史网页。 比如说,一些儿童故事音频就可以在http://archive.org下载到,可以用来做英语听力启蒙用。 举个例子,…...

力扣用队列实现栈
自己写的栈,再让其他函数去调用自己写的栈 typedef int QDataType; typedef struct QueueNode {struct QueueNode* next;//单链表QDataType data;//放数据 }QNode;typedef struct Queue {QNode* phead;//头节点QNode* ptail;//尾节点QDataType size; //统计有多少节…...

轨道交通条形屏电源技术分析:超薄化与高可靠性的工程平衡
一、行业背景与技术挑战在智慧城轨建设中,地铁站内条形屏是乘客信息显示系统的核心终端设备。该应用场景对配套电源提出以下技术要求:技术需求具体指标工程挑战超薄化整机厚度3-8mm传统变压器/散热器高度难以压缩高可靠性MTBF≥50000小时轨道交通振动、温…...

AI Agent交互设计新范式:基于Leader Key的可编程对话流实践
1. 项目概述与核心价值最近在折腾AI智能体(AI Agent)的开发,发现一个挺有意思的现象:很多开发者,包括我自己在内,在初期都会把大量精力花在模型调用、工具链集成这些“硬核”功能上,却常常忽略了…...


Armv8-A内存模型特性寄存器详解与应用
1. Armv8-A内存模型特性寄存器概述在Armv8-A架构中,内存模型特性寄存器(Memory Model Feature Registers,简称MMFR)是一组关键的系统寄存器,用于描述处理器实现的内存管理功能特性。这些寄存器采用只读访问模式&#x…...

77种商品-图像分类数据集
77种商品图像分类数据集 数据集(文章最后关注公众号获取数据集): 链接: https://pan.baidu.com/s/1Xcj5Z-RSUjGH47OIbH5wjQ?pwd=fq2p 提取码: fq2p 数据集信息介绍: 以下是整理后的清晰呈现,按照商品名称首字母顺序进行排列: 东方树叶红茶:文件夹中的图片数量为 150 …...

华硕游侠2-RX键盘多功能滚轮自定义M失效的解决方案
新买了一块游侠2 rx键盘,想着用自定义滚轮方便打开常用程序,但是发现在Armoury Crate中设置后不起作用,网上解决方案伤筋动骨,得不偿失,有一定风险。 经测试,自定义滚轮能正常执行宏定义,只是对…...
)
倍福官网改版后,如何用F12开发者工具找回消失的Twincat3老版本安装包(附4024.11下载链接)
倍福官网改版后如何找回消失的Twincat3老版本安装包 作为一名自动化工程师,你是否遇到过这样的困境:项目需要特定版本的Twincat3进行维护或兼容性测试,但倍福官网改版后,历史版本下载入口却神秘消失了?这种情况在工业软…...

突然想写一些东西
---title: blogdate: 2026-05-15 02:18:57tags: ["chitchat"]about: 突然想写一些东西---马上毕业了,在写致谢的时候发现好像想写的东西挺多的,但是不知道怎么写出来了,可能是因为很久没写东西了?也可能是AI用多了自己深…...

Cursor编辑器深度美化:CSS注入与动态特效实现全解析
1. 项目概述:当代码编辑器拥有了“皮肤”与“特效”如果你和我一样,每天有超过8小时的时间是在代码编辑器里度过的,那么你一定理解一个顺眼、顺手、甚至有点“酷”的编辑环境意味着什么。它不仅仅是生产力的工具,更是我们开发者思…...

Arm Neoverse CMN-650时钟与电源管理架构解析
1. Arm Neoverse CMN-650时钟与电源管理架构解析在现代SoC设计中,时钟与电源管理子系统如同城市的水电供应网络,其设计优劣直接决定了系统性能与能耗效率的平衡。Arm Neoverse CMN-650作为新一代互连架构,通过创新的时钟域划分和电源域管理机…...