18.示例程序(编码器接口测速)
STM32标准库开发-各章节笔记-查阅传送门_Archie_IT的博客-CSDN博客![]() https://blog.csdn.net/m0_61712829/article/details/132434192?spm=1001.2014.3001.5501
https://blog.csdn.net/m0_61712829/article/details/132434192?spm=1001.2014.3001.5501
 main.c
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Timer.h"
#include "Encoder.h"uint16_t speed;int main(void)
{OLED_Init(); //初始化OLEDTimer_Init(); //初始化定时器Encoder_init();OLED_ShowString(1,1,"speed:");while(1){OLED_ShowSignedNum(1,7,speed,5);//每隔一段时间读取一次;用定时中断}}//定时器2中断函数放在使用中断的main.c文件中;在startup文件中;定时中断每隔1s执行一次
void TIM2_IRQHandler(void) //当定时器产生更新中断时,这个函数就会自动被执行
{//检查中断标志位if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET){//执行相应的用户代码speed = Encoder_Get(); //定时器每隔1s读取一下速度,存在speed变量里TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//清除标志位}}
Encoder.c
#include "stm32f10x.h" // Device header//编码器旋转控制CNT自增自减
//编码器初始化函数,编码器电路初始化后,CNT就会随着编码器旋转而自增自减;直接读出CNT值就能测量编码器的位置;测量编码器的速度和方向就需要每隔一段固定的闸门时间取出一次CNT然后再把CNT清零这就是测频法测量速度了
/*
第一步,RCC开启时钟,开启GPIO和定时器的时钟
第二步,配置GPIO,需将PA6和PA7配置成输入模式
第三步,配置时基单元,预分频器一般选择不分频,ARR一般给最大值655535,只需要CNT执行计数就行了
第四步,配置输入捕获单元,这里只有滤波器和极性两个参数有用,后面的参数没有用到,与编码器无关
第五步,配置编码器接口模式,直接调用一个库函数
最后,调用TIM_Cmd,启动定时器
*/void Encoder_init(void)
{//1.打开时钟,选择内部时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//2.初始化GPIOGPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入,与外部模块保持默认电平一致(上拉与下拉的选择原则);一般来说是默认高电平,所以一般上拉输入用的比较多;若不确定外部模块输出的默认状态或外部信号输出功率非常小,这时就尽量选择浮空输入(浮空输入:没有上拉和下拉电阻去影响外部信号,缺点是当引脚悬空,没有默认的电平了,输入就会受噪声干扰,来回不断地跳变)GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //不需要初始化时基单元下面这个内部时钟函数,因为编码器接口会托管时钟,编码器接口就是一个带方向控制的外部时钟,所以内部时钟就不用了//TIM_InternalClockConfig(TIM3);//3.配置时基单元 /*公式:PWM 频 率:Freq = CK_PSC / (PSC + 1) / (ARR + 1)PWM占空比:Duty = CCR / (ARR + 1)PWM分辨率:Reso = 1 / (ARR + 1)*/TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //指定时钟分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,这个参数也是没有作用的,计数方向也是被编码器接口托管的TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //ARR 周期 ,满量程计数,这样计数的范围是最大的而且方便换算成负数TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //PSC 预分频器,不分频,编码器的时钟直接驱动计数器TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器的值TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure); //初始化TIM3//4.配置输入捕获单元(通道),编码器接口只使用了通道1和2的滤波器和极性选择//首先定义结构体变量,然后StructInit给结构体赋一个初始值,再部分修改我们想要的参数,调用ICInit配置一遍电路,结构体变量的配置在调用ICInit函数之后就写入到硬件的寄存器了,所以ICInit之后这个结构体我们可以换个值继续使用、不需要重新定义新的结构体TIM_ICInitTypeDef TIM_ICInitStructure;TIM_ICStructInit(&TIM_ICInitStructure);//结构体初始化,防止结构体中出现不确定值可能造成问题,最好用StructInit给结构体赋一个初始值TIM_ICInitStructure.TIM_Channel = TIM_Channel_1; //通道1TIM_ICInitStructure.TIM_ICFilter = 0xF; //滤波器为0xF//TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //电平极性为上升沿,这里的上升沿参数代表的是高低电平极性不反转;等会配置编码器接口的时候也有极性配置,属于重复配置,这个其实可以删掉;这里的上升沿并不代表上升沿有效,因为编码器接口始终都是上升沿、下降沿都有效TIM_ICInit(TIM3, &TIM_ICInitStructure);TIM_ICInitStructure.TIM_Channel = TIM_Channel_2; //通道2TIM_ICInitStructure.TIM_ICFilter = 0xF; //滤波器为0xF//TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //电平极性为上升沿,这里的上升沿参数代表的是高低电平极性不反转;等会配置编码器接口的时候也有极性配置,属于重复配置,这个其实可以删掉;这里的上升沿并不代表上升沿有效,因为编码器接口始终都是上升沿、下降沿都有效TIM_ICInit(TIM3, &TIM_ICInitStructure);//5.配置编码器接口,只需调用一个函数就行了;;需保证TIM_EncoderInterfaceConfig在TIM_ICInit函数之后,否则TIM_ICInit覆盖TIM_EncoderInterfaceConfig函数的配置TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);//选择Rising是通道不反相,选择Falling是通道反相;重复配置TIM_ICPolarity_Rising,后面的参数会覆盖前面的参数配置//6.启动定时器TIM_Cmd(TIM3,ENABLE);
}int16_t Encoder_Get(void)
{//测速,在固定的匝门时间读一次CNT然后把CNT清零int16_t temp;//因为要先读取CNT再清零,所以要用temp缓存一下temp = TIM_GetCounter(TIM3);//读取CNTTIM_SetCounter(TIM3,0);//CNT清零 return temp;}Encoder.h
#ifndef __ENCODER_H
#define __ENCODER_Hvoid Encoder_init(void);
int16_t Encoder_Get(void);#endif相关文章:
18.示例程序(编码器接口测速)
STM32标准库开发-各章节笔记-查阅传送门_Archie_IT的博客-CSDN博客https://blog.csdn.net/m0_61712829/article/details/132434192?spm1001.2014.3001.5501 main.c #include "stm32f10x.h" // Device header #include "Delay.h" #incl…...
【超详细】Fastjson 1.2.24 命令执行漏洞复现-JNDI简单实现反弹shell(CVE-2017-18349)
前言: 看了很多别人关于漏洞复现过程,很多博客过程简洁,有的过程过于复杂,比如看到写java代码,用javac进行编译等等。所以我想写出比较详细的漏洞复现过程。 一,漏洞介绍 1-1 fastjson是什么 fastjson是…...

【牛客网】JZ39 数组中出现次数超过一半的数字
题目 思路 思路1 将数组排序,再保证有结果的情况下,此时数组中间的数字就是想要的结果 思路2 在保证有结果的情况下,此时数组的的众数是数组长度的一半以上 所以我们可以通过抵消的做法来找到最终的结果 我们可以从头遍历这个数组,如果两个数不相同,则消去这两个数,最坏的…...
【Mysql】Lock wait timeout exceeded; try restarting transaction
出现这种问题通常是有事务长时间未提交导致的 可以使用以下sql 查询事务进程 然后通过 kill 线程ID 的方式 ,结束该事务 SELECTtrx_id AS 事务ID,trx_mysql_thread_id AS 线程ID,trx_state AS 事务状态,trx_started AS 开始时间,trx_tables_locked AS 锁定的表,trx_query AS …...
python生成中金所期权行权价
参考沪深300股指期权的合约表,写一个工具函数: 使用方法 def get_format_option_gap(value: float, deviation: int 0): # 根据中证1000指数获取点位"""根据标准的行权价,生成不同档位的期权列表,适合中金所:…...

CentOS7.9 安装postgresql
# 添加postgres账户 sudo groupadd postgres sudo useradd -g postgres postgres # 修改postgres账号密码 passwd postgres # 安装postgresql cd ~tar zxvf postgresql-15.3.tar.gz cd postgresql-15.3./configure --prefix/usr/local/pgsql --without-readlinemake -j4 …...

qt线程介绍
目录 介绍 线程类 QThread 方式1 方式2 案例 线程资源释放 介绍 qt为多线程提供了完美的支持,实现多线程一般是从从QTHread中继承定义自己的线程类,QT也提供了QMutexLocker,QwaitCondition等类实现线程同步,与Linux系统或C中的线程库类似…...

记一次用dataframe进行数据清理
总结一下dataframe读取数据库,以及整理数据的过程。分为三个部分:数据读取,数据整理以及数据写入。 1、数据读取 从csv读取读取数据,使用pandas读的read_csv函数,传入两个参数,分别是path文件路径&#x…...
《Jetpack Compose从入门到实战》 第二章 了解常用UI组件
目录 常用的基础组件文字组件图片组件按钮组件选择器组件对话框组件进度条组件 常用的布局组件布局Scaffold脚手架 列表 书附代码 Google的图标库 常用的基础组件 文字组件 Composable fun TestText() {Column(modifier Modifier.verticalScroll(state rememberScrollState…...

Vue3 引入使用 vant组件详解
目录 Vue3 引入使用 vant组件详解1.安装2.引入2.1 全局引入2.2 按需引入2.2.1 vite项目:vite.config.js2.2.2 Webpack项目:webpack.config.js2.2.3 配置在vue.config.js中 3.使用 Vue3 引入使用 vant组件详解 Vant是一个强大的移动端组件库,目前Vant 官…...
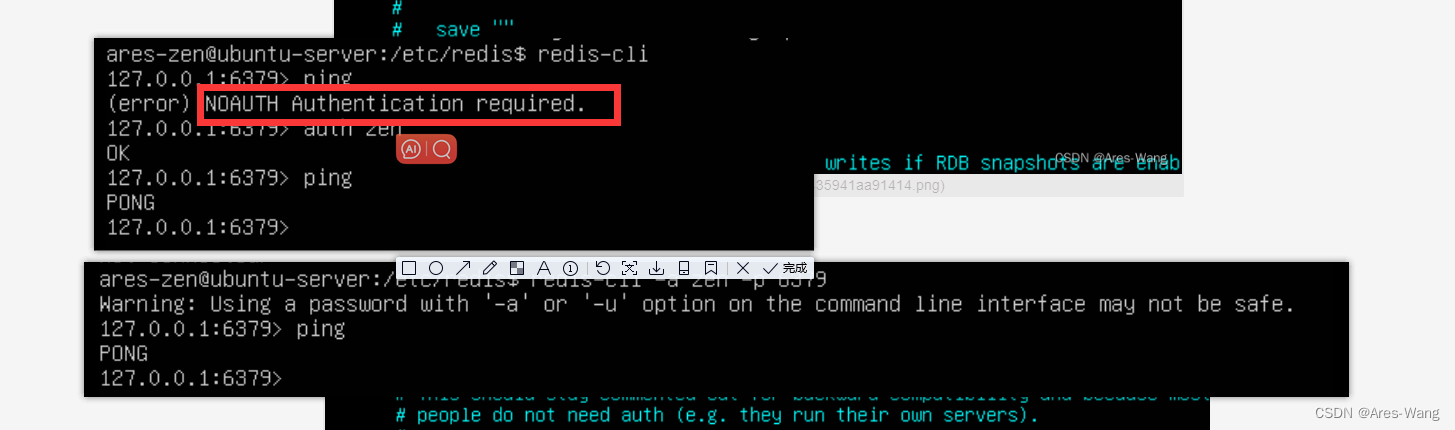
NOSQL Redis Ubuntu系列 常用的配置 及密码登录
查看Ubuntu 版本 uname -a 配置redis.conf 查看redis 是否安装成功 ps -ef | grep redis 查看redis 服务状态 service redis status 查看redis 默认安装的路径 whereis redis #sudo vim /etc/redis.conf redis 密码登录...

C语言解析GPS源数据
文章目录 一、GPS数据格式介绍二、GPS字段含义三、C语言解析数据代码3.1 解析每个字段数据3.2 解析定位数据 一、GPS数据格式介绍 GPS(全球定位系统)数据格式常见的是NMEA 0183格式,NMEA 0183格式是一种用于导航设备间传输数据的标准格式&am…...
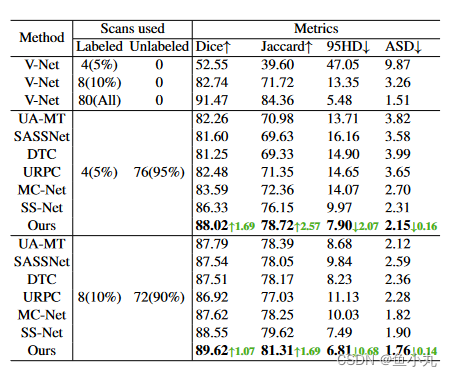
【论文阅读】(CVPR2023)用于半监督医学图像分割的双向复制粘贴
目录 前言方法BCPMean-teacher and Traning StrategyPre-Training via Copy-PasteBidirectional Copy-Paste ImagesBidirectional Copy-Paste Supervisory Signals Loss FunctionTesting Phase 结论 先看这个图,感觉比较清晰。它整个的思路就是把有标签的图片和无标…...

[Linux 基础] 一篇带你了解linux权限问题
文章目录 1、Linux下的两种用户2、文件类型和访问权限(事物属性)2.1 Linux下的文件类型2.2 基本权限2.3 文件权限值的表示方法(1)字符表示方法(2)8进制数值表示方法 2.4 文件访问权限的相关设置方法(1) chm…...
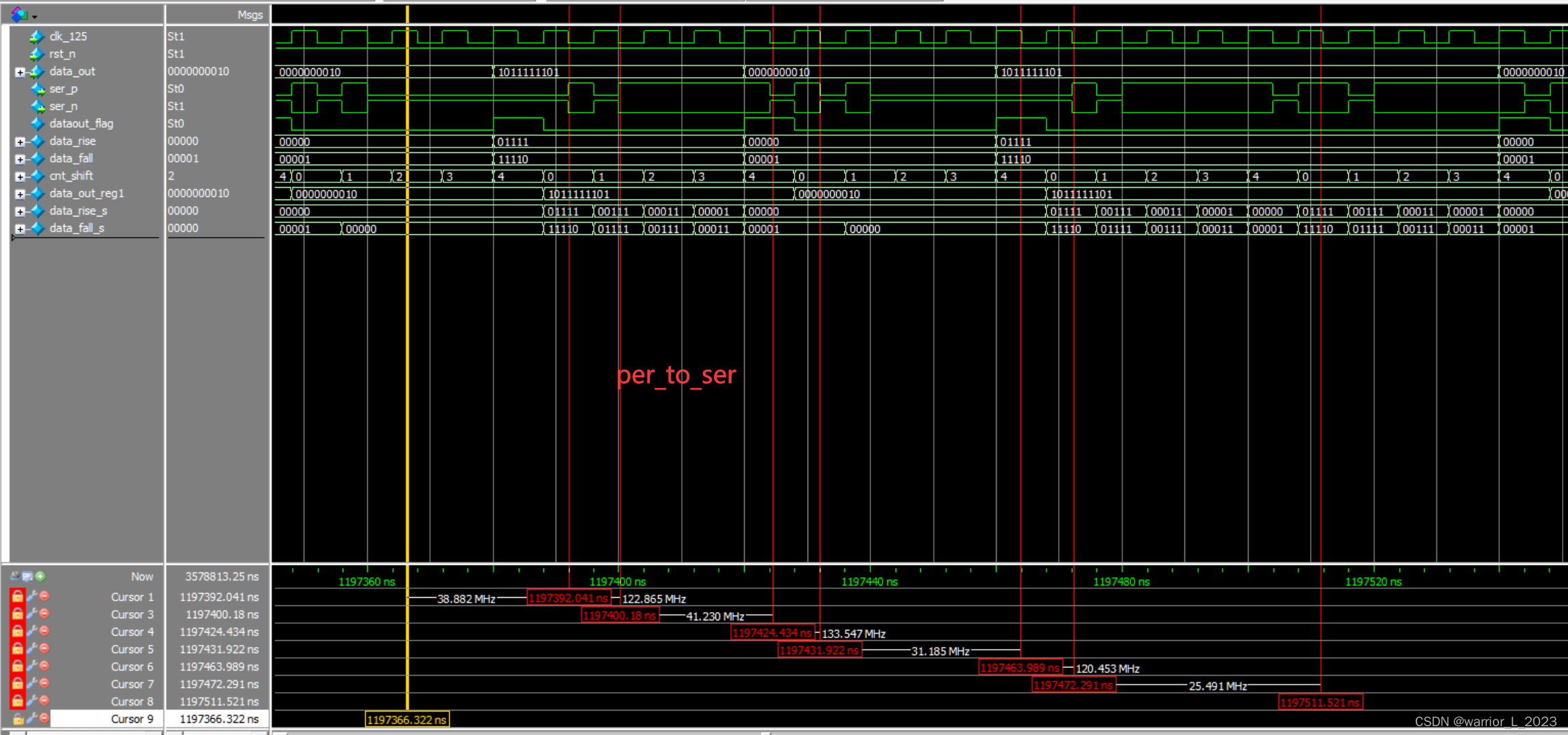
FPGA project :HDMI
实验目标:驱动HdMI显示十色等宽彩条。 本实验的重点是: 1掌握TMDS通信协议。 2rgb565转rgb888。 3编写HDMI驱动程序。 4学会看流程图编写代码。 值得注意的事情 1注意数据与解析数据的信号(比如传入的数据中0或者1的个数)&…...

基于微信小程序的物流快递信息查询平台同城急送小程序(亮点:寄件、发票申请、在线聊天)
文章目录 前言系统主要功能:具体实现截图论文参考详细视频演示为什么选择我自己的网站自己的小程序(小蔡coding)有保障的售后福利 代码参考源码获取 前言 💗博主介绍:✌全网粉丝10W,CSDN特邀作者、博客专家、CSDN新星计…...
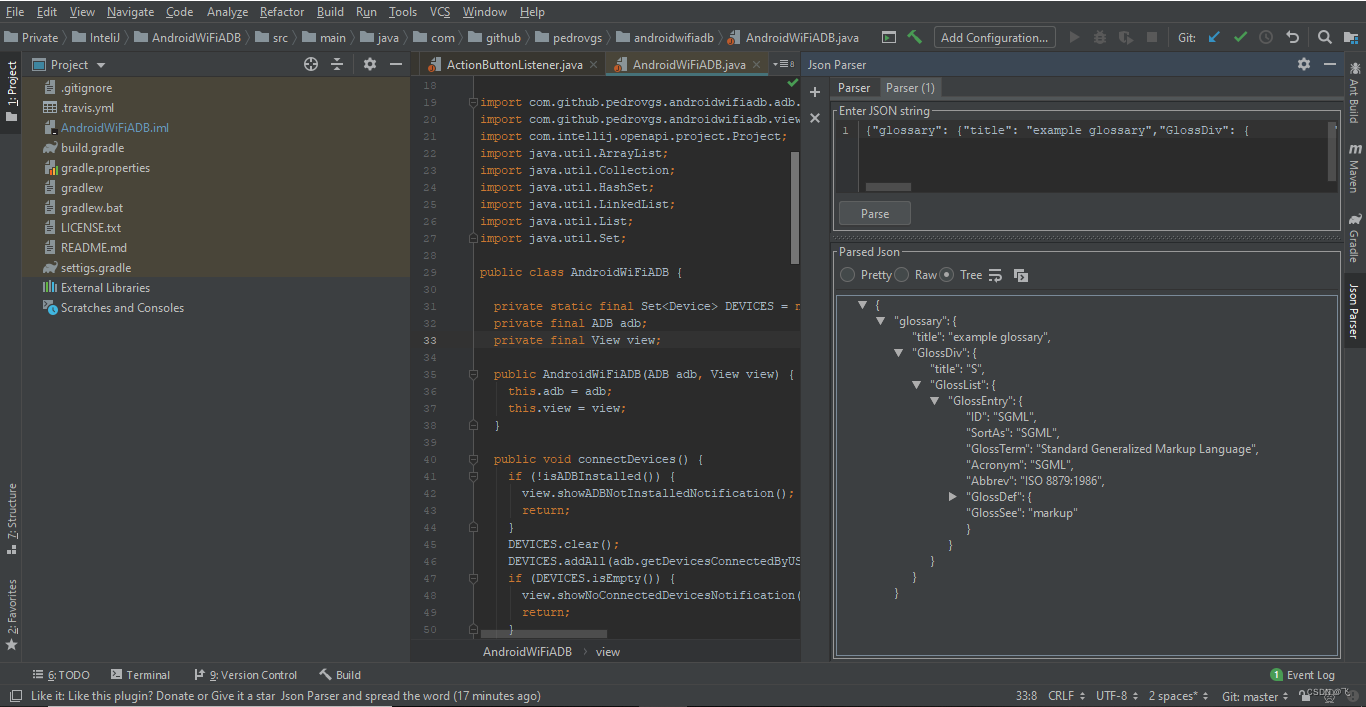
idea插件推荐
目录 一、插件安装方式 file->settings->plugins->macketplace 各个版本IDE插件界面略有不同,不一一赘述 二、常用插件 1、Background Image Plus 推荐指数:★★★★☆ 这款插件并不能直接提高你的开发效率,但是可以让你面对的ID…...
Arcgis快速计算NDVI
Arcgis快速计算NDVI 一、问题描述 如何使用Arcgis像ENVI一样波段计算NDVI的值,事实上,Arcgis更快速一些。 二、操作步骤 首先准备好影像 打开窗口-影像分析 点击左上角 点击确定 (发现自己使用的遥感影像不对劲,是计算好了…...
SpringCloud Alibaba - 基于 FeignClient 整合 Sentinel,实现“线程隔离”和“熔断降级”
目录 一、FeignClient 整合 Sentinel 1.1、整合原因 1.2、实现步骤 1.2.1、修改 OrderService 中的 application.yml 文件 1.2.2、给 FeignClient 编写失败后的降级逻辑 二、线程隔离 2.1、线程隔离的两种方式 2.1.1、线程池隔离 2.1.2、信号量隔离(Sentin…...
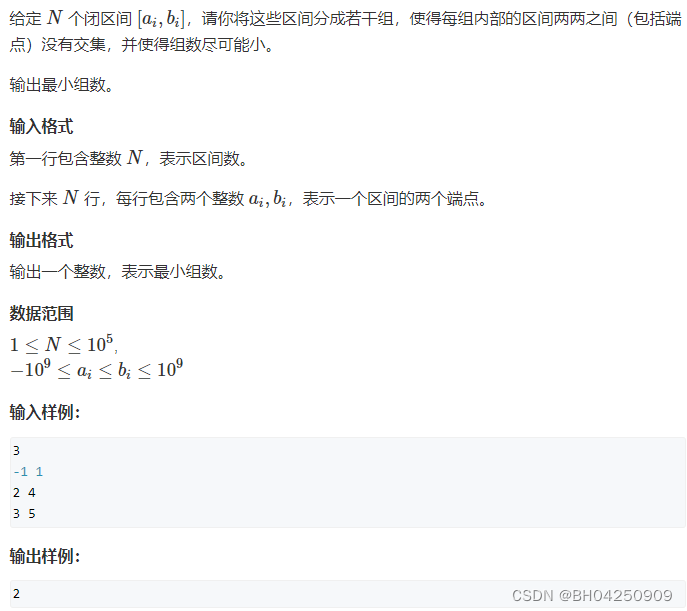
Acwing 906. 区间分组
Acwing 906. 区间分组 知识点题目描述思路讲解代码展示 知识点 贪心 题目描述 思路讲解 这段代码是用来维护一个最小堆,以确保右边界不相交的区间被正确地保留在堆中。让我详细解释这段代码: heap.empty():这个条件检查最小堆 heap 是否为…...

无机布防火卷帘门报价透明,包工包料,一次说清所有费用
很多客户在选购无机布防火卷帘门时,最关心实际成交价格,也担心报价不清晰,后期产生各类额外支出。行业内产品定价参差不齐,选材做工不同,最终价位自然存在差距,挑选时不能只看表面低价。 👉 点击…...

信息系统项目管理师核心知识点精讲
一、项目整合管理(重点:项目章程与项目管理计划) 知识点详解: 项目整体管理是项目管理知识体系的核心,它确保项目各要素协调统一。在考试中,特别要掌握项目章程和项目管理计划的区别与联系。 项目章程是项目的“出生证明”,由项目发起人发布。它正式授权项目,赋予项…...

第3篇:系统透视——信息部门如何构建“税务友好型”IT架构
本篇导读:如果你是信息总监或IT负责人,请通读全文,尤其是“系统合规设计的三必须”和“现场检查SOP”;如果你是财税人员,请重点阅读“研产供销全链条的系统对接要求”和“与IT部门的协作要点”;如果你是老板…...

3步深度解锁:网络设备权限管理工具的实战手册
3步深度解锁:网络设备权限管理工具的实战手册 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 你是否曾面对功能受限的网络设备感到束手无策?当默认配置锁死了硬…...

腾讯 Marvis 初级使用教程——从安装到上手
腾讯最新系统级AI助手Marvis(2026年5月20日发布),官网 https://marvis.qq.com,主打“一句话操作电脑”、跨端协同、GUI Agent执行。虽然是个【小龙虾】,但上手其实不难。这篇就简单写写 Marvis 的安装和基础使用&#…...

终极Chrome画中画扩展:如何在浏览器中实现高效视频多任务处理
终极Chrome画中画扩展:如何在浏览器中实现高效视频多任务处理 【免费下载链接】picture-in-picture-chrome-extension 项目地址: https://gitcode.com/gh_mirrors/pi/picture-in-picture-chrome-extension 想要在浏览网页、处理文档的同时继续观看视频内容吗…...

浏览器指纹识别机制深度剖析与反识别技术实现
一、浏览器指纹技术基础认知1.1 浏览器指纹的核心定义在数字化时代,每一台接入互联网的设备都会留下独特的数字标识,浏览器指纹便是其中最关键的识别凭证之一。浏览器指纹是网站通过 JavaScript 脚本、HTTP 请求头、硬件接口调用等多种技术手段ÿ…...

UE5项目打包后RenderTarget导出图片全黑?手把手教你解决伽马校正与资产打包问题
UE5打包后RenderTarget导出图片全黑的终极解决方案当你花了整整三天时间调试RenderTarget导出功能,终于在编辑器里看到完美的截图效果,却在打包成可执行文件后发现所有导出的图片都变成了一片漆黑——这种从云端跌入谷底的感觉,每个UE开发者都…...

如何高效实现Windows自动化鼠标点击:AutoClicker完整实战指南
如何高效实现Windows自动化鼠标点击:AutoClicker完整实战指南 【免费下载链接】AutoClicker AutoClicker is a useful simple tool for automating mouse clicks. 项目地址: https://gitcode.com/gh_mirrors/au/AutoClicker AutoClicker是一款专业的Windows桌…...
)
【Sora 2 HDR生成黄金公式】:曝光补偿系数×动态范围压缩阈值×时域一致性权重=可商用HDR帧率(附Python验证脚本)
更多请点击: https://codechina.net 第一章:Sora 2 HDR视频生成黄金公式的提出与商业意义 Sora 2 的HDR视频生成能力不再依赖传统多曝光融合或后期调色管线,而是通过一个端到端可微分的物理感知渲染公式实现原生高动态范围建模。该公式被业界…...