TF坐标变换
ROS小乌龟跟随
5.1 TF坐标变换 · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
tf模块:在 ROS 中用于实现不同坐标系之间的点或向量的转换。
在ROS中坐标变换最初对应的是tf,不过在 hydro 版本开始, tf 被弃用,迁移到 tf2,后者更为简洁高效,tf2对应的常用功能包有:
tf2_geometry_msgs:可以将ROS消息转换成tf2消息。
tf2: 封装了坐标变换的常用消息。
tf2_ros:为tf2提供了roscpp和rospy绑定,封装了坐标变换常用的API。
坐标系:ROS 中是通过坐标系统开标定物体的,确切的将是通过右手坐标系来标定的。
1.坐标msg消息
订阅发布模型中数据载体 msg 是一个重要实现,首先需要了解一下,在坐标转换实现中常用的 msg:geometry_msgs/TransformStamped 和 geometry_msgs/PointStamped
前者用于传输坐标系相关位置信息,后者用于传输某个坐标系内坐标点的信息。在坐标变换中,频繁的需要使用到坐标系的相对关系以及坐标点信息。
2.静态坐标变换
所谓静态坐标变换,是指两个坐标系之间的相对位置是固定的。
创建项目功能包依赖于tf2 tf2_ros tf2_geometry_msgs roscpp rospy std_msgs geometry_msgs
注意子级与父级坐标系的关系以及坐标转换函数transform()使用的方法。
3.动态坐标变换
所谓动态坐标变换,是指两个坐标系之间的相对位置是变化的。
启动 turtlesim_node,该节点中窗体有一个世界坐标系(左下角为坐标系原点),乌龟是另一个坐标系,键盘控制乌龟运动,将两个坐标系的相对位置动态发布 。
创建项目功能包依赖于 tf2 tf2_ros tf2_geometry_msgs roscpp rospy std_msgs geometry_msgs turtlesim
订阅 turtle1/pose,可以获取乌龟在世界坐标系的 x坐标、y坐标、偏移量以及线速度和角速度。
ros::Subscriber sub = nh.subscribe<turtlesim::Pose>("/turtle1/pose",1000,callback);void callback(const turtlesim::Pose::ConstPtr& pose){geometry_msgs::TransformStamped tfs;// |----头设置tfs.header.frame_id = "world";tfs.header.stamp = ros::Time::now();// |----坐标系 IDtfs.child_frame_id = "turtle1";// |----坐标系相对信息设置tfs.transform.translation.x = pose->x;tfs.transform.translation.y = pose->y;tfs.transform.translation.z = 0.0; // 二维实现,pose 中没有z,z 是 0
}4.多坐标变换
现有坐标系统,父级坐标系统 world,下有两子级系统 son1,son2,son1 相对于 world,以及 son2 相对于 world 的关系是已知的,求 son1原点在 son2中的坐标,又已知在 son1中一点的坐标,要求求出该点在 son2 中的坐标。
创建项目功能包依赖于 tf2 tf2_ros tf2_geometry_msgs roscpp rospy std_msgs geometry_msgs turtlesim
使用静态坐标变换发布son1 son2 分别相对于world的坐标关系
<launch><node pkg="tf2_ros" type="static_transform_publisher" name="son1" args="0.2 0.8 0.3 0 0 0 /world /son1" output="screen" /><node pkg="tf2_ros" type="static_transform_publisher" name="son2" args="0.5 0 0 0 0 0 /world /son2" output="screen" />
</launch>
解析 son1 中的点相对于 son2 的坐标
geometry_msgs::TransformStamped tfs = buffer.lookupTransform("son2","son1",ros::Time(0));
ROS_INFO("Son1 相对于 Son2 的坐标关系:父坐标系ID=%s",tfs.header.frame_id.c_str());
ROS_INFO("Son1 相对于 Son2 的坐标关系:子坐标系ID=%s",tfs.child_frame_id.c_str());
ROS_INFO("Son1 相对于 Son2 的坐标关系:x=%.2f,y=%.2f,z=%.2f",tfs.transform.translation.x,tfs.transform.translation.y,fs.transform.translation.z);然后解析坐标,求出该点在 son2 中的坐标。
geometry_msgs::PointStamped ps;
ps.header.frame_id = "son1";
ps.header.stamp = ros::Time::now();
ps.point.x = 1.0;
ps.point.y = 2.0;
ps.point.z = 3.0;geometry_msgs::PointStamped psAtSon2;
psAtSon2 = buffer.transform(ps,"son2");
ROS_INFO("在 Son2 中的坐标:x=%.2f,y=%.2f,z=%.2f",psAtSon2.point.x,psAtSon2.point.y,psAtSon2.point.z);5.坐标系关系查看
输入下面命令查看是否包含该功能包
rospack find tf2_tools如果没有,请使用如下命令安装:
sudo apt install ros-noetic-tf2-tools
启动坐标系广播程序之后,运行如下命令:
rosrun tf2_tools view_frames.py
当前目录会生成一个 frames.pdf 文件


6.TF坐标变换实操
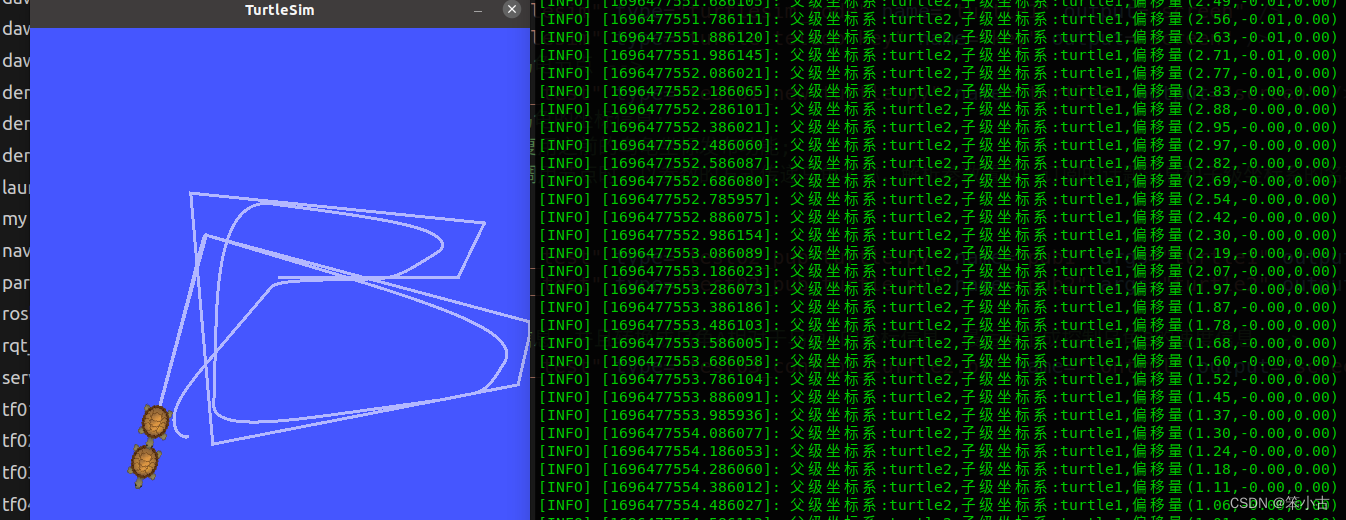
产生两只乌龟,中间的乌龟(A) 和 左下乌龟(B), B 会自动运行至A的位置,并且键盘控制时,只是控制 A 的运动,但是 B 可以跟随 A 运行
输入命令
rosrun turtlesim turtlesim_node 
此时只出现了一只小乌龟,那么如何创建第二只小乌龟,并且不受键盘控制而是跟随第一只小乌龟运动呢?我们需要使用rosservice,话题使用的是 spawn.
创建出第二只小乌龟后,需要做的是订阅两只小乌龟的位姿信息并转换为坐标信息,之后获取第一只小乌龟相对于第二只小乌龟的坐标信息,这里要注意是turtle1相对于turtle2的坐标信息,不要搞反了,最后向第二只小乌龟发布相应的速度信息跟随第一只小乌龟。
5.1.6 TF坐标变换实操 · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
7.TF2与TF
TF2已经替换了TF,TF2是TF的超集,建议学习 TF2 而非 TF。
TF2 功能包的增强了内聚性,TF 与 TF2 所依赖的功能包是不同的,TF 对应的是tf包,TF2 对应的是tf2和tf2_ros包,在 TF2 中不同类型的 API 实现做了分包处理。
TF2 实现效率更高,比如在:TF2 的静态坐标实现、TF2 坐标变换监听器中的 Buffer 实现等。
坐标变换在机器人系统中是一个极其重要的组成模块,在 ROS 中 TF2 组件是专门用于实现坐标变换的,TF2 实现具体内容又主要介绍了如下几部分:
1.静态坐标变换广播器,可以编码方式或调用内置功能包来实现(建议后者),适用于相对固定的坐标系关系
2.动态坐标变换广播器,以编码的方式广播坐标系之间的相对关系,适用于易变的坐标系关系
3.坐标变换监听器,用于监听广播器广播的坐标系消息,可以实现不同坐标系之间或同一点在不同坐标系之间的变换。
4.机器人系统中的坐标系关系是较为复杂的,还可以通过 tf2_tools 工具包来生成 ros 中的坐标系关系图。
相关文章:
TF坐标变换
ROS小乌龟跟随 5.1 TF坐标变换 Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 tf模块:在 ROS 中用于实现不同坐标系之间的点或向量的转换。 在ROS中坐标变换最初对应的是tf,不过在 hydro 版本开始, tf 被弃用,迁移到 tf2,后者更…...

如何进行网络编程和套接字操作?
网络编程是计算机编程中重要的领域之一,它使程序能够在网络上进行数据传输和通信。C语言是一种强大的编程语言,也可以用于网络编程。网络编程通常涉及套接字(Socket)操作,套接字是一种用于网络通信的抽象接口。本文将详…...

在Spark中集成和使用Hudi
本文介绍了在Spark中集成和使用Hudi的功能。使用Spark数据源API(scala和python)和Spark SQL,插入、更新、删除和查询Hudi表的代码片段。 1.安装 Hudi适用于Spark-2.4.3+和Spark 3.x版本。 1.1 Spark 3支持矩阵 Hudi...
力扣第226翻转二叉数 c++三种方法 +注释
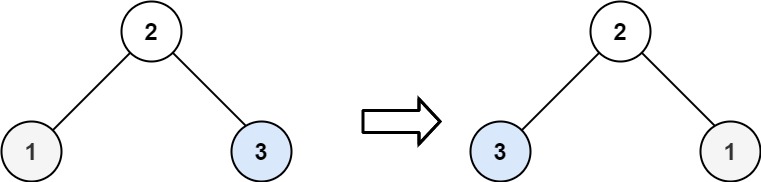
题目 226. 翻转二叉树 简单 给你一棵二叉树的根节点 root ,翻转这棵二叉树,并返回其根节点。 示例 1: 输入:root [4,2,7,1,3,6,9] 输出:[4,7,2,9,6,3,1]示例 2: 输入:root [2,1,3] 输出&am…...

React项目部署 - Nginx配置
写在前面:博主是一只经过实战开发历练后投身培训事业的“小山猪”,昵称取自动画片《狮子王》中的“彭彭”,总是以乐观、积极的心态对待周边的事物。本人的技术路线从Java全栈工程师一路奔向大数据开发、数据挖掘领域,如今终有小成…...
【Vue3】定义全局变量和全局函数
// main.ts import { createApp } from vue import App from ./App.vue const app createApp(App)// 解决 ts 报错 type Filter {format<T>(str: T): string } declare module vue {export interface ComponentCustomProperties {$filters: Filter,$myArgs: string} }a…...

【Pandas】Apply自定义行数
文章目录 1. Series的apply方法2. DataFrame的apply方法2.1 针对列使用apply2.2 针对行使用apply Pandas提供了很多数据处理的API,但当提供的API不能满足需求的时候,需要自己编写数据处理函数, 这个时候可以使用apply函数apply函数可以接收一个自定义函数, 可以将DataFrame的行…...

C#,数值计算——完全VEGAS编码的蒙特·卡洛计算方法与源程序
1 文本格式 using System; namespace Legalsoft.Truffer { /// <summary> /// Complete VEGAS Code /// adaptive/recursive Monte Carlo /// </summary> public abstract class VEGAS { const int NDMX 50; const int …...

纯css实现3D鼠标跟随倾斜
老规矩先上图 为什么今天会想起来整这个呢?这是因为和我朋友吵架, 就是关于这个效果的,就是这个 卡片懸停毛玻璃效果, 我朋友认为纯css也能写, 我则坦言他就是在放狗屁,这种跟随鼠标的3D效果要怎么可能能用纯css写, 然后吵着吵着发现,欸,好像真能用css写哦,我以前还写过这种…...

Pandas数据结构
文章目录 1. Series数据结构1.1 Series数据类型创建1.2 Series的常用属性valuesindex/keys()shapeTloc/iloc 1.3 Series的常用方法mean()max()/min()var()/std()value_counts()describe() 1.4 Series运算加/减法乘法 2. DataFrame数据结构2.1 DataFrame数据类型创建2.2 布尔索引…...
systemverilog function的一点小case
关于function的应用无论是在systemverilog还是verilog中都有很广泛的应用,但是一直有一个模糊的概念困扰着我,今天刚好有时间来搞清楚并记录下来。 关于fucntion的返回值的问题: function integer clog2( input logic[255:0] value);for(cl…...

微服务的初步使用
环境说明 jdk1.8 maven3.6.3 mysql8 idea2022 spring cloud2022.0.8 微服务案例的搭建 新建父工程 打开IDEA,File->New ->Project,填写Name(工程名称)和Location(工程存储位置),选…...
【2023年11月第四版教材】第18章《项目绩效域》(合集篇)
第18章《项目绩效域》(合集篇) 1 章节内容2 干系人绩效域2.1 绩效要点2.2 执行效果检查2.3 与其他绩效域的相互作用 3 团队绩效域3.1 绩效要点3.2 与其他绩效域的相互作用3.3 执行效果检查3.4 开发方法和生命周期绩效域 4 绩效要点4.1 与其他绩效域的相互…...

Android 11.0 mt6771新增分区功能实现三
1.前言 在11.0的系统开发中,在对某些特殊模块中关于数据的存储方面等需要新增分区来保存, 所以就需要在系统分区新增分区,接下来就来实现这个功能,看系列三的实现过程 2.mt6771新增分区功能实现三的核心类 build/make/tools/releasetools/common.py device/mediatek/mt6…...
计算机网络——计算机网络的性能指标(上)-速率、带宽、吞吐量、时延
目录 速率 比特 速率 例1 带宽 带宽在模拟信号系统中的意义 带宽在计算机网络中的意义 吞吐量 时延 发送时延 传播时延 处理时延 例2 例3 速率 了解速率之前,先详细了解一下比特: 比特 计算机中数据量的单位,也是信息论中信…...
)
每日一题 518零钱兑换2(完全背包)
题目 给你一个整数数组 coins 表示不同面额的硬币,另给一个整数 amount 表示总金额。 请你计算并返回可以凑成总金额的硬币组合数。如果任何硬币组合都无法凑出总金额,返回 0 。 假设每一种面额的硬币有无限个。 题目数据保证结果符合 32 位带符号整…...
Linux shell编程学习笔记8:使用字符串
一、前言 字符串是大多数编程语言中最常用最有用的数据类型,这在Linux shell编程中也不例外。 本文讨论了Linux Shell编程中的字符串的三种定义方式的差别,以及字符串拼接、取字符串长度、提取字符串、查找子字符串等常用字符串操作,,以及反…...
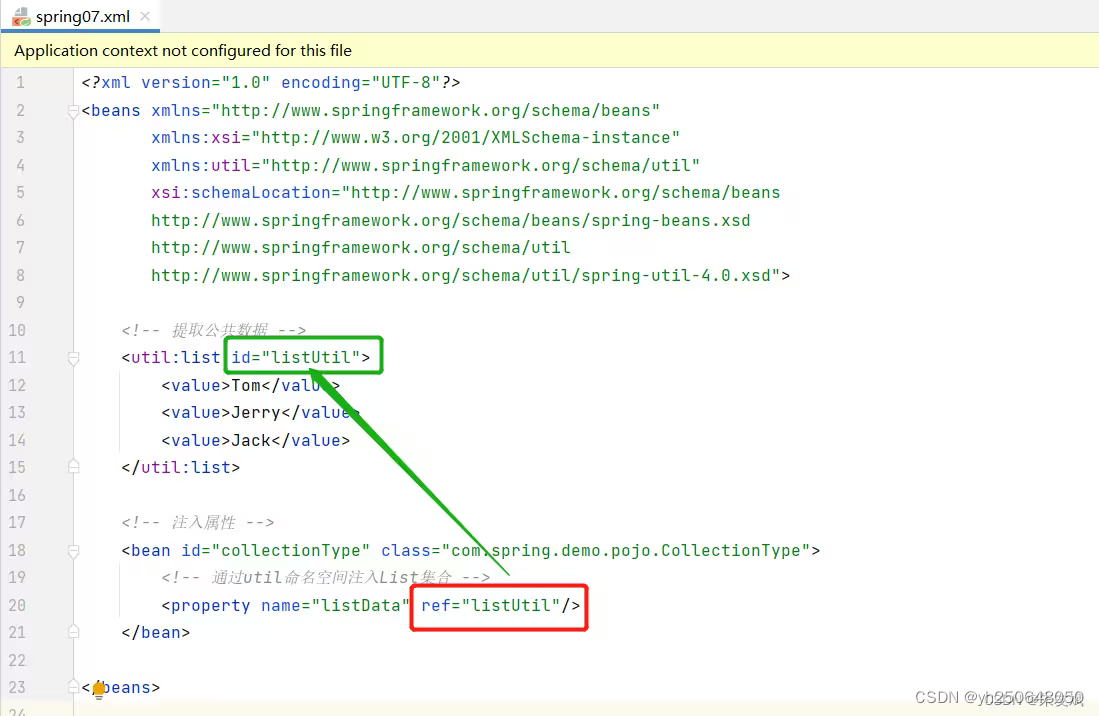
【Spring笔记03】Spring依赖注入各种数据类型
这篇文章,详细介绍一下Spring框架中如何注入各种数据类型,包含:注入基本数据类型、数组、集合、Map映射、Property属性、注入空字符串、注入null值、注入特殊字符等内容,以及如何使用命名空间进行依赖注入。 目录 一、注入各种数据…...

2023计算机保研——双非上岸酒吧舞
我大概是从22年10月份开始写博客的,当时因为本校专业的培养方案的原因,课程很多,有些知识纸质记录很不方便,于是选择了打破了自己的成见使用博客来记录学习生活。对于我个人而言,保研生活在前一大半过程中都比较艰难&a…...
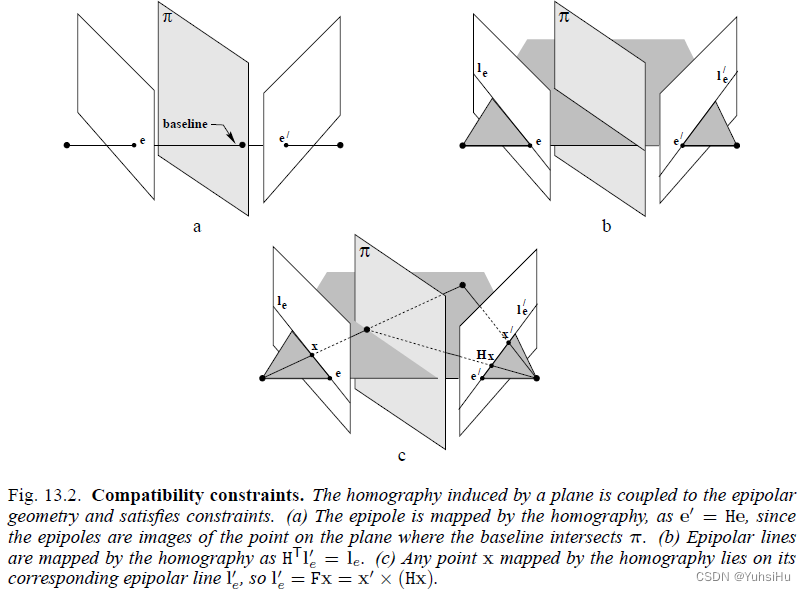
《计算机视觉中的多视图几何》笔记(13)
13 Scene planes and homographies 本章主要讲述两个摄像机和一个世界平面之间的射影几何关系。 我们假设空间有一平面 π \pi π,平面上的一点为 x π x_{\pi} xπ。 x π x_{\pi} xπ分别在两幅图像 P , P ′ P, P P,P′上形成了 x , x ′ x, x x,x′。 那…...

基于Vagrant的Claude本地部署:自动化AI开发环境搭建指南
1. 项目概述:一个让Claude在本地“安家”的Vagrant包装器 如果你和我一样,是个喜欢在本地环境折腾各种AI工具的开发人员,那你肯定对Claude这个强大的语言模型不陌生。但官方提供的使用方式往往受限于网络环境、API调用成本或者隐私顾虑&…...

oh-my-opencode:AI编程操作系统,智能体编排与哈希锚定编辑实战
1. 项目概述:一个为AI编程而生的“操作系统”如果你和我一样,在过去一年里深度使用过Claude Code、Cursor或者各种开源的AI编程工具,那你一定经历过这种痛苦:模型选型让人眼花缭乱,配置流程复杂到让人想放弃࿰…...

Arclight故障排除与性能调优:解决常见问题的终极方案
Arclight故障排除与性能调优:解决常见问题的终极方案 【免费下载链接】Arclight A Bukkit(1.20/1.21) server implementation in modding environment using Mixin. ⚡ 项目地址: https://gitcode.com/gh_mirrors/ar/Arclight Arclight作为基于Mixin技术的Bu…...

CANN/GE获取模型输出名称
aclmdlGetOutputNameByIndex 【免费下载链接】ge GE(Graph Engine)是面向昇腾的图编译器和执行器,提供了计算图优化、多流并行、内存复用和模型下沉等技术手段,加速模型执行效率,减少模型内存占用。 GE 提供对 PyTorch…...

从Bode图到PI参数:基于开环传函特性的转速环整定实战解析
1. 转速环PI参数整定的核心逻辑 我第一次接触电机控制时,面对转速环PI参数整定这个"黑箱"完全无从下手。直到把Bode图和PI参数的关系捋清楚,才发现原来频域分析才是解开这个谜团的钥匙。转速环本质上是个闭环系统,但我们要整定PI参…...

开源营销技能图谱:构建个人与团队的数字化能力体系
1. 项目概述:一个营销人的开源技能库如果你在营销行业摸爬滚打过几年,大概率会和我有一样的感受:这个领域变化太快了。今天还在研究信息流广告的OCPM出价,明天可能就要琢磨AIGC内容生成;刚把SEO的站内优化搞明白&#…...

为什么GitHub Copilot Review Mode在2026 Q1突然下线?真相藏在奇点大会发布的《AI原生审查伦理宪章》第7.2条中……
更多请点击: https://intelliparadigm.com 第一章:AI原生代码审查:2026奇点智能技术大会Code Review新范式 在2026奇点智能技术大会上,AI原生代码审查(AI-Native Code Review)正式取代传统人工规则引擎混合…...

安全扫描自动化:构建持续安全检测体系
安全扫描自动化:构建持续安全检测体系 一、安全扫描自动化概述 1.1 安全扫描自动化的定义 安全扫描自动化是指通过工具和脚本自动执行安全检测任务,包括漏洞扫描、代码安全检测、配置安全检查等。它是DevSecOps实践的重要组成部分。 1.2 安全扫描自动化的…...

AI教材编写工具实测:低查重效果显著,让教材生成更轻松!
教材编写的合规挑战与 AI 工具的解决方案 在教材编写的过程中,原创性与合规性之间的平衡是一个重要的问题。在借鉴优质教材内容的同时,创作者们往往担心查重率过高;而在尝试自主原创知识点时,又可能面临逻辑不严谨或内容不准确的…...

新手教程使用Python和Taotoken快速调用大模型API完成第一个对话
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 新手教程:使用Python和Taotoken快速调用大模型API完成第一个对话 对于刚接触大模型API的开发者而言,第一步…...