(六)正点原子STM32MP135移植——内核移植
目录
一、概述
二、编译官方代码
三、移植
四、编译
一、概述
前面已经移植好了TF-A、optee、u-boot,在u-boot能正常跑起来的情况下,现在来移植内核。
二、编译官方代码
进入kernel目录
2.1 解压源码、打补丁
/* 解压源码 */
tar xf linux-6.1.28.tar.xz/* 进入源码目录 */
cd linux-6.1.28//* 打补丁 */
for p in `ls -1 ../*.patch`; do patch -p1 < $p; done2.2 配置Kernel
根据官方手册进行配置即可
/* 配置交叉编译器 */
source /opt/st/stm32mp1/4.2.1-openstlinux-6.1-yocto-mickledore-mp1-v23.06.21/environment-setup-cortexa7t2hf-neon-vfpv4-ostl-linux-gnueabi /* 输出文件夹 */
export OUTPUT_BUILD_DIR=$PWD/../build
mkdir -p ${OUTPUT_BUILD_DIR}/* 默认配置文件 */
make ARCH=arm O="${OUTPUT_BUILD_DIR}" multi_v7_defconfig fragment*.config2.3 编译内核
编译模块好像要好久,可以不要编译
/* 编译uImage 设备树 */
make ARCH=arm uImage vmlinux dtbs LOADADDR=0xC2000040 O="${OUTPUT_BUILD_DIR}"/* 编译模块 */
make ARCH=arm modules O="${OUTPUT_BUILD_DIR}"/* 配置输出文件路径 */
make ARCH=arm INSTALL_MOD_PATH="${OUTPUT_BUILD_DIR}/install_artifact" modules_install O="${OUTPUT_BUILD_DIR}"
mkdir -p ${OUTPUT_BUILD_DIR}/install_artifact/boot//* 拷贝输出文件 */
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/uImage ${OUTPUT_BUILD_DIR}/install_artifact/boot/
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/dts/st*.dtb ${OUTPUT_BUILD_DIR}/install_artifact/boot/这时候去查看build/install_artifact目录下,有boot和lib两个文件夹,boot里有uImage和设备树,lib里是内核模块
三、移植
3.1 复制文件
/* 进入设备树目录 */
cd arch/arm/boot/dts/cp stm32mp135f-dk.dts stm32mp135-atk.dts
cp stm32mp13-pinctrl.dtsi stm32mp135-pinctrl-atk.dtsi/* 回到源码根目录 */
cd ../../../../3.2 修改头文件
打开stm32mp135-atk.dts,把引脚头文件改成我们的
// #include "stm32mp13-pinctrl.dtsi"
#include "stm32mp13-pinctrl-atk.dtsi"3.3 修改电源
首先找到&scmi_regu节点,全都干掉
// &scmi_regu {
// scmi_vddcpu: voltd-vddcpu {
// reg = <VOLTD_SCMI_STPMIC1_BUCK1>;
// regulator-name = "vddcpu";
// };
// scmi_vdd: voltd-vdd {
// reg = <VOLTD_SCMI_STPMIC1_BUCK3>;
// regulator-name = "vdd";
// };
// scmi_vddcore: voltd-vddcore {
// reg = <VOLTD_SCMI_STPMIC1_BUCK4>;
// regulator-name = "vddcore";
// };
// scmi_vdd_adc: voltd-vdd-adc {
// reg = <VOLTD_SCMI_STPMIC1_LDO1>;
// regulator-name = "vdd_adc";
// };
// scmi_vdd_usb: voltd-vdd-usb {
// reg = <VOLTD_SCMI_STPMIC1_LDO4>;
// regulator-name = "vdd_usb";
// };
// scmi_vdd_sd: voltd-vdd-sd {
// reg = <VOLTD_SCMI_STPMIC1_LDO5>;
// regulator-name = "vdd_sd";
// };
// scmi_v1v8_periph: voltd-v1v8-periph {
// reg = <VOLTD_SCMI_STPMIC1_LDO6>;
// regulator-name = "v1v8_periph";
// };
// scmi_v3v3_sw: voltd-v3v3-sw {
// reg = <VOLTD_SCMI_STPMIC1_PWR_SW2>;
// regulator-name = "v3v3_sw";
// };
// };去根节点下添加我们对电源的描述,找到v3v3_ao这个节点,把它删了,替换成我们的
// v3v3_ao: v3v3-ao {// compatible = "regulator-fixed";// regulator-name = "v3v3_ao";// regulator-min-microvolt = <3300000>;// regulator-max-microvolt = <3300000>;// regulator-always-on;// };
vddcore: vddcore {compatible = "regulator-fixed";regulator-name = "vddcore";regulator-min-microvolt = <1250000>;regulator-max-microvolt = <1250000>;regulator-off-in-suspend;regulator-always-on;};vddcpu: vddcpu {compatible = "regulator-fixed";regulator-name = "vddcpu";regulator-min-microvolt = <1350000>;regulator-max-microvolt = <1350000>;regulator-off-in-suspend;regulator-always-on;};v3v3: v3v3 {compatible = "regulator-fixed";regulator-name = "v3v3";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};vbus_otg: vbus_otg {compatible = "regulator-fixed";regulator-name = "vbus_otg";regulator-min-microvolt = <5000000>;regulator-max-microvolt = <5000000>;regulator-off-in-suspend;regulator-always-on;};vdd: vdd {compatible = "regulator-fixed";regulator-name = "vdd";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};vdd_usb: vdd_usb {compatible = "regulator-fixed";regulator-name = "vdd_usb";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};v1v8_audio: regulator-v1v8_audio {compatible = "regulator-fixed";regulator-name = "v1v8_audio";regulator-min-microvolt = <1800000>;regulator-max-microvolt = <1800000>;regulator-always-on;regulator-boot-on;};v3v3_hdmi: regulator-v3v3-hdmi {compatible = "regulator-fixed";regulator-name = "v3v3_hdmi";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-always-on;regulator-boot-on;};v1v2_hdmi: regulator-v1v2-hdmi {compatible = "regulator-fixed";regulator-name = "v1v2_hdmi";regulator-min-microvolt = <1200000>;regulator-max-microvolt = <1200000>;regulator-always-on;regulator-boot-on;};3.4 添加看门狗
由于笔者前面移植u-boot、optee、TF-A哪里遗忘了一个iwdg2,正点原子使用的是iwdg2,而ST官方使用的是arm_wdt,如果前面用到了iwdg2,那就在这里添加上,如果没有则pass这一部分
&iwdg2 {timeout-sec = <32>;status = "okay";
};3.5 修改网络
找到eth1和eth2,修改成正点原子的
ð1 {status = "okay";pinctrl-0 = <ð1_rgmii_pins_a>;pinctrl-1 = <ð1_rgmii_sleep_pins_a>;pinctrl-names = "default", "sleep";phy-mode = "rgmii-id";max-speed = <1000>;phy-handle = <&phy0_eth1>;nvmem-cells = <ðernet_mac1_address>;nvmem-cell-names = "mac-address";mdio1 {#address-cells = <1>;#size-cells = <0>;compatible = "snps,dwmac-mdio";phy0_eth1: ethernet-phy@1 {reg = <1>;};};
};ð2 {status = "okay";pinctrl-0 = <ð2_rgmii_pins_a>;pinctrl-1 = <ð2_rgmii_sleep_pins_a>;pinctrl-names = "default", "sleep";phy-mode = "rgmii-id";max-speed = <1000>;phy-handle = <&phy0_eth2>;phy-supply = <&v3v3>;nvmem-cells = <ðernet_mac2_address>;nvmem-cell-names = "mac-address";mdio1 {#address-cells = <1>;#size-cells = <0>;compatible = "snps,dwmac-mdio";phy0_eth2: ethernet-phy@2 {reg = <2>;};};
};3.6 修改sdmmc
找到sdmmc1和sdmmc2,修改成我们的
&sdmmc1 {pinctrl-names = "default", "opendrain", "sleep";pinctrl-0 = <&sdmmc1_b4_pins_a &sdmmc1_clk_pins_a>;pinctrl-1 = <&sdmmc1_b4_od_pins_a &sdmmc1_clk_pins_a>;pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;cd-gpios = <&gpiof 15 (GPIO_ACTIVE_LOW | GPIO_PULL_UP)>;st,neg-edge;no-1-8-v;bus-width = <4>;vmmc-supply = <&v3v3>;#address-cells = <1>;#size-cells = <0>;status = "okay";
};/* EMMC */
&sdmmc2 {pinctrl-names = "default", "opendrain", "sleep";pinctrl-0 = <&sdmmc2_b4_pins_a &sdmmc2_b4_b7_pins_a &sdmmc2_clk_pins_a>;pinctrl-1 = <&sdmmc2_b4_od_pins_a &sdmmc2_b4_b7_od_pins_a &sdmmc2_clk_pins_a>;pinctrl-2 = <&sdmmc2_b4_sleep_pins_a &sdmmc2_b4_b7_sleep_pins_a>;non-removable;st,neg-edge;mmc-ddr-3_3v;no-1-8-v;bus-width = <8>;vmmc-supply = <&v3v3>;keep-power-in-suspend;#address-cells = <1>;#size-cells = <0>;status = "okay";
};3.7 删掉其它
如果根文件系统是在emmc里,只需要修改一个sdmmc2能用就行;如果根文件系统需要通过nfs挂载,那就需要修改eth1和eth2节点。而对于其他部分,USB、OTG、LCD等外设,都是可以删除的,这些都是正点原子会讲会移植的东西,所以笔者在这里把不需要的外设全部移除
1. usbh_ehci、usbotg_hs、usbphyc、usbphyc_port0、usbphyc_port1
2. usart1、 usart2、uart8
3. timers3、timers4、timers8、timers14
4. spi5
5. rtc
6. ltdc
7. i2c1、i2c5
8. dcmipp
9. adc1
10. 根节点下:gpio-keys、leds、panel_backlight、panel_rgb、wake_up、wifi_pwrseq
删除之后可以得到一个相对精简的设备树:
// SPDX-License-Identifier: (GPL-2.0+ OR BSD-3-Clause)
/** Copyright (C) STMicroelectronics 2021 - All Rights Reserved* Author: Alexandre Torgue <alexandre.torgue@foss.st.com> for STMicroelectronics.*//dts-v1/;#include <dt-bindings/gpio/gpio.h>
#include <dt-bindings/input/input.h>
#include <dt-bindings/leds/common.h>
#include <dt-bindings/regulator/st,stm32mp13-regulator.h>
#include <dt-bindings/rtc/rtc-stm32.h>
#include "stm32mp135.dtsi"
#include "stm32mp13xf.dtsi"
#include "stm32mp13-pinctrl-atk.dtsi"/ {model = "ATK STM32MP135-ATK Discovery Board";compatible = "st,stm32mp135-ATK", "st,stm32mp135";aliases {ethernet0 = ð1;ethernet1 = ð2;serial0 = &uart4;};chosen {stdout-path = "serial0:115200n8";#address-cells = <1>;#size-cells = <1>;ranges;framebuffer {compatible = "simple-framebuffer";clocks = <&rcc LTDC_PX>;status = "disabled";};};clocks {clk_ext_camera: clk-ext-camera {#clock-cells = <0>;compatible = "fixed-clock";clock-frequency = <24000000>;};clk_mco1: clk-mco1 {#clock-cells = <0>;compatible = "fixed-clock";clock-frequency = <24000000>;};};memory@c0000000 {device_type = "memory";reg = <0xc0000000 0x20000000>;};reserved-memory {#address-cells = <1>;#size-cells = <1>;ranges;optee@dd000000 {reg = <0xdd000000 0x3000000>;no-map;};};vddcore: vddcore {compatible = "regulator-fixed";regulator-name = "vddcore";regulator-min-microvolt = <1250000>;regulator-max-microvolt = <1250000>;regulator-off-in-suspend;regulator-always-on;};vddcpu: vddcpu {compatible = "regulator-fixed";regulator-name = "vddcpu";regulator-min-microvolt = <1350000>;regulator-max-microvolt = <1350000>;regulator-off-in-suspend;regulator-always-on;};v3v3: v3v3 {compatible = "regulator-fixed";regulator-name = "v3v3";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};vbus_otg: vbus_otg {compatible = "regulator-fixed";regulator-name = "vbus_otg";regulator-min-microvolt = <5000000>;regulator-max-microvolt = <5000000>;regulator-off-in-suspend;regulator-always-on;};vdd: vdd {compatible = "regulator-fixed";regulator-name = "vdd";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};vdd_usb: vdd_usb {compatible = "regulator-fixed";regulator-name = "vdd_usb";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-off-in-suspend;regulator-always-on;};v1v8_audio: regulator-v1v8_audio {compatible = "regulator-fixed";regulator-name = "v1v8_audio";regulator-min-microvolt = <1800000>;regulator-max-microvolt = <1800000>;regulator-always-on;regulator-boot-on;};v3v3_hdmi: regulator-v3v3-hdmi {compatible = "regulator-fixed";regulator-name = "v3v3_hdmi";regulator-min-microvolt = <3300000>;regulator-max-microvolt = <3300000>;regulator-always-on;regulator-boot-on;};v1v2_hdmi: regulator-v1v2-hdmi {compatible = "regulator-fixed";regulator-name = "v1v2_hdmi";regulator-min-microvolt = <1200000>;regulator-max-microvolt = <1200000>;regulator-always-on;regulator-boot-on;};
};&iwdg2 {timeout-sec = <32>;status = "okay";
};&arm_wdt {timeout-sec = <32>;status = "okay";
};&crc1 {status = "okay";
};&cryp {status = "okay";
};&dts {status = "okay";
};ð1 {status = "okay";pinctrl-0 = <ð1_rgmii_pins_a>;pinctrl-1 = <ð1_rgmii_sleep_pins_a>;pinctrl-names = "default", "sleep";phy-mode = "rgmii-id";max-speed = <1000>;phy-handle = <&phy0_eth1>;nvmem-cells = <ðernet_mac1_address>;nvmem-cell-names = "mac-address";mdio1 {#address-cells = <1>;#size-cells = <0>;compatible = "snps,dwmac-mdio";phy0_eth1: ethernet-phy@1 {reg = <1>;};};
};ð2 {status = "okay";pinctrl-0 = <ð2_rgmii_pins_a>;pinctrl-1 = <ð2_rgmii_sleep_pins_a>;pinctrl-names = "default", "sleep";phy-mode = "rgmii-id";max-speed = <1000>;phy-handle = <&phy0_eth2>;phy-supply = <&v3v3>;nvmem-cells = <ðernet_mac2_address>;nvmem-cell-names = "mac-address";mdio1 {#address-cells = <1>;#size-cells = <0>;compatible = "snps,dwmac-mdio";phy0_eth2: ethernet-phy@2 {reg = <2>;};};
};&sdmmc1 {pinctrl-names = "default", "opendrain", "sleep";pinctrl-0 = <&sdmmc1_b4_pins_a &sdmmc1_clk_pins_a>;pinctrl-1 = <&sdmmc1_b4_od_pins_a &sdmmc1_clk_pins_a>;pinctrl-2 = <&sdmmc1_b4_sleep_pins_a>;cd-gpios = <&gpiof 15 (GPIO_ACTIVE_LOW | GPIO_PULL_UP)>;st,neg-edge;no-1-8-v;bus-width = <4>;vmmc-supply = <&v3v3>;#address-cells = <1>;#size-cells = <0>;status = "okay";
};/* EMMC */
&sdmmc2 {pinctrl-names = "default", "opendrain", "sleep";pinctrl-0 = <&sdmmc2_b4_pins_a &sdmmc2_b4_b7_pins_a &sdmmc2_clk_pins_a>;pinctrl-1 = <&sdmmc2_b4_od_pins_a &sdmmc2_b4_b7_od_pins_a &sdmmc2_clk_pins_a>;pinctrl-2 = <&sdmmc2_b4_sleep_pins_a &sdmmc2_b4_b7_sleep_pins_a>;non-removable;st,neg-edge;mmc-ddr-3_3v;no-1-8-v;bus-width = <8>;vmmc-supply = <&v3v3>;keep-power-in-suspend;#address-cells = <1>;#size-cells = <0>;status = "okay";
};&uart4 {pinctrl-names = "default", "sleep", "idle";pinctrl-0 = <&uart4_pins_a>;pinctrl-1 = <&uart4_sleep_pins_a>;pinctrl-2 = <&uart4_idle_pins_a>;/delete-property/dmas;/delete-property/dma-names;status = "okay";
};3.8 修改引脚
由于前面删了很多无关外设,引脚我们只需要复制原子的部分即可:eth1、eth2、emmc1、emmc2
// SPDX-License-Identifier: (GPL-2.0+ OR BSD-3-Clause)
/** Copyright (C) STMicroelectronics 2021 - All Rights Reserved* Author: Alexandre Torgue <alexandre.torgue@foss.st.com>*/
#include <dt-bindings/pinctrl/stm32-pinfunc.h>&pinctrl {eth1_rgmii_pins_a: eth1-rgmii-1 {pins1 {pinmux = <STM32_PINMUX('F', 12, AF11)>, /* ETH1_RGMII_CLK125 */<STM32_PINMUX('C', 1, AF11)>, /* ETH1_RGMII_GTX_CLK */<STM32_PINMUX('G', 13, AF11)>, /* ETH1_RGMII_TXD0 */<STM32_PINMUX('G', 14, AF11)>, /* ETH1_RGMII_TXD1 */<STM32_PINMUX('C', 2, AF11)>, /* ETH1_RGMII_TXD2 */<STM32_PINMUX('E', 5, AF10)>, /* ETH1_RGMII_TXD3 */<STM32_PINMUX('B', 11, AF11)>, /* ETH1_RGMII_TX_CTL */<STM32_PINMUX('A', 2, AF11)>, /* ETH1_MDIO */<STM32_PINMUX('G', 2, AF11)>; /* ETH1_MDC */bias-disable;drive-push-pull;slew-rate = <2>;};pins2 {pinmux = <STM32_PINMUX('C', 4, AF11)>, /* ETH1_RGMII_RXD0 */<STM32_PINMUX('C', 5, AF11)>, /* ETH1_RGMII_RXD1 */<STM32_PINMUX('B', 0, AF11)>, /* ETH1_RGMII_RXD2 */<STM32_PINMUX('B', 1, AF11)>, /* ETH1_RGMII_RXD3 */<STM32_PINMUX('A', 1, AF11)>, /* ETH1_RGMII_RX_CLK */<STM32_PINMUX('A', 7, AF11)>; /* ETH1_RGMII_RX_CTL */bias-disable;};};eth1_rgmii_sleep_pins_a: eth1-rgmii-sleep-1 {pins1 {pinmux = <STM32_PINMUX('F', 12, ANALOG)>, /* ETH1_RGMII_CLK125 */<STM32_PINMUX('C', 1, ANALOG)>, /* ETH1_RGMII_GTX_CLK */<STM32_PINMUX('G', 13, ANALOG)>, /* ETH1_RGMII_TXD0 */<STM32_PINMUX('G', 14, ANALOG)>, /* ETH1_RGMII_TXD1 */<STM32_PINMUX('C', 2, ANALOG)>, /* ETH1_RGMII_TXD2 */<STM32_PINMUX('E', 5, ANALOG)>, /* ETH1_RGMII_TXD3 */<STM32_PINMUX('B', 11, ANALOG)>, /* ETH1_RGMII_TX_CTL */<STM32_PINMUX('A', 2, ANALOG)>, /* ETH1_MDIO */<STM32_PINMUX('G', 2, ANALOG)>, /* ETH1_MDC */<STM32_PINMUX('C', 4, ANALOG)>, /* ETH1_RGMII_RXD0 */<STM32_PINMUX('C', 5, ANALOG)>, /* ETH1_RGMII_RXD1 */<STM32_PINMUX('B', 0, ANALOG)>, /* ETH1_RGMII_RXD2 */<STM32_PINMUX('B', 1, ANALOG)>, /* ETH1_RGMII_RXD3 */<STM32_PINMUX('A', 1, ANALOG)>, /* ETH1_RGMII_RX_CLK */<STM32_PINMUX('A', 7, ANALOG)>; /* ETH1_RGMII_RX_CTL */};};eth2_rgmii_pins_a: eth2-rgmii-2 {pins1 {pinmux = <STM32_PINMUX('H', 2, AF13)>, /* ETH2_RGMII_CLK125 */<STM32_PINMUX('F', 7, AF11)>, /* ETH2_RGMII_TXD0 */<STM32_PINMUX('G', 11, AF10)>, /* ETH2_RGMII_TXD1 */<STM32_PINMUX('G', 1, AF10)>, /* ETH2_RGMII_TXD2 */<STM32_PINMUX('E', 6, AF11)>, /* ETH2_RGMII_TXD3 */<STM32_PINMUX('G', 3, AF10)>, /* ETH2_RGMII_GTX_CLK */<STM32_PINMUX('F', 6, AF11)>, /* ETH2_RGMII_TX_CTL */<STM32_PINMUX('B', 2, AF11)>, /* ETH2_MDIO */<STM32_PINMUX('G', 5, AF10)>; /* ETH2_MDC */bias-disable;drive-push-pull;slew-rate = <2>;};pins2 {pinmux = <STM32_PINMUX('F', 4, AF11)>, /* ETH2_RGMII_RXD0 */<STM32_PINMUX('E', 2, AF10)>, /* ETH2_RGMII_RXD1 */<STM32_PINMUX('H', 6, AF12)>, /* ETH2_RGMII_RXD2 */<STM32_PINMUX('A', 8, AF11)>, /* ETH2_RGMII_RXD3 */<STM32_PINMUX('H', 11, AF11)>, /* ETH2_RGMII_RX_CLK */<STM32_PINMUX('G', 12, AF12)>; /* ETH2_RGMII_RX_CTL */bias-disable;};};eth2_rgmii_sleep_pins_a: eth2-rgmii-sleep-2 {pins1 {pinmux = <STM32_PINMUX('H', 2, ANALOG)>, /* ETH2_RGMII_CLK125 */<STM32_PINMUX('F', 7, ANALOG)>, /* ETH2_RGMII_TXD0 */<STM32_PINMUX('G', 11, ANALOG)>, /* ETH2_RGMII_TXD1 */<STM32_PINMUX('G', 1, ANALOG)>, /* ETH2_RGMII_TXD2 */<STM32_PINMUX('E', 6, ANALOG)>, /* ETH2_RGMII_TXD3 */<STM32_PINMUX('G', 3, ANALOG)>, /* ETH2_RGMII_GTX_CLK */<STM32_PINMUX('F', 6, ANALOG)>, /* ETH2_RGMII_TX_CTL */<STM32_PINMUX('B', 2, ANALOG)>, /* ETH2_MDIO */<STM32_PINMUX('G', 5, ANALOG)>, /* ETH2_MDC */<STM32_PINMUX('F', 4, ANALOG)>, /* ETH2_RGMII_RXD0 */<STM32_PINMUX('E', 2, ANALOG)>, /* ETH2_RGMII_RXD1 */<STM32_PINMUX('H', 6, ANALOG)>, /* ETH2_RGMII_RXD2 */<STM32_PINMUX('A', 8, ANALOG)>, /* ETH2_RGMII_RXD3 */<STM32_PINMUX('H', 11, ANALOG)>, /* ETH2_RGMII_RX_CLK */<STM32_PINMUX('G', 12, ANALOG)>; /* ETH2_RGMII_RX_CTL */};};sdmmc1_b4_pins_a: sdmmc1-b4-0 {pins {pinmux = <STM32_PINMUX('C', 8, AF12)>, /* SDMMC1_D0 */<STM32_PINMUX('C', 9, AF12)>, /* SDMMC1_D1 */<STM32_PINMUX('C', 10, AF12)>, /* SDMMC1_D2 */<STM32_PINMUX('C', 11, AF12)>, /* SDMMC1_D3 */<STM32_PINMUX('D', 2, AF12)>; /* SDMMC1_CMD */slew-rate = <1>;drive-push-pull;bias-disable;};};sdmmc1_b4_od_pins_a: sdmmc1-b4-od-0 {pins1 {pinmux = <STM32_PINMUX('C', 8, AF12)>, /* SDMMC1_D0 */<STM32_PINMUX('C', 9, AF12)>, /* SDMMC1_D1 */<STM32_PINMUX('C', 10, AF12)>, /* SDMMC1_D2 */<STM32_PINMUX('C', 11, AF12)>; /* SDMMC1_D3 */slew-rate = <1>;drive-push-pull;bias-disable;};pins2 {pinmux = <STM32_PINMUX('D', 2, AF12)>; /* SDMMC1_CMD */slew-rate = <1>;drive-open-drain;bias-disable;};};sdmmc1_b4_sleep_pins_a: sdmmc1-b4-sleep-0 {pins {pinmux = <STM32_PINMUX('C', 8, ANALOG)>, /* SDMMC1_D0 */<STM32_PINMUX('C', 9, ANALOG)>, /* SDMMC1_D1 */<STM32_PINMUX('C', 10, ANALOG)>, /* SDMMC1_D2 */<STM32_PINMUX('C', 11, ANALOG)>, /* SDMMC1_D3 */<STM32_PINMUX('C', 12, ANALOG)>, /* SDMMC1_CK */<STM32_PINMUX('D', 2, ANALOG)>; /* SDMMC1_CMD */};};sdmmc1_clk_pins_a: sdmmc1-clk-0 {pins {pinmux = <STM32_PINMUX('C', 12, AF12)>; /* SDMMC1_CK */slew-rate = <1>;drive-push-pull;bias-disable;};};sdmmc2_b4_pins_a: sdmmc2-b4-0 {pins {pinmux = <STM32_PINMUX('B', 14, AF10)>, /* SDMMC2_D0 */<STM32_PINMUX('B', 15, AF10)>, /* SDMMC2_D1 */<STM32_PINMUX('B', 3, AF10)>, /* SDMMC2_D2 */<STM32_PINMUX('B', 4, AF10)>, /* SDMMC2_D3 */<STM32_PINMUX('G', 6, AF10)>; /* SDMMC2_CMD */slew-rate = <1>;drive-push-pull;bias-pull-up;};};sdmmc2_b4_b7_pins_a: sdmmc2-b4-b7-0 {pins {pinmux = <STM32_PINMUX('F', 0, AF10)>, /* SDMMC2_D4 */<STM32_PINMUX('B', 9, AF10)>, /* SDMMC2_D5 */<STM32_PINMUX('C', 6, AF10)>, /* SDMMC2_D6 */ <STM32_PINMUX('C', 7, AF10)>; /* SDMMC2_D7 */slew-rate = <1>;drive-push-pull;bias-pull-up;};};sdmmc2_b4_od_pins_a: sdmmc2-b4-od-0 {pins1 {pinmux = <STM32_PINMUX('B', 14, AF10)>, /* SDMMC2_D0 */<STM32_PINMUX('B', 15, AF10)>, /* SDMMC2_D1 */<STM32_PINMUX('B', 3, AF10)>, /* SDMMC2_D2 */<STM32_PINMUX('B', 4, AF10)>; /* SDMMC2_D3 */slew-rate = <1>;drive-push-pull;bias-pull-up;};pins2 {pinmux = <STM32_PINMUX('G', 6, AF10)>; /* SDMMC2_CMD */slew-rate = <1>;drive-open-drain;bias-pull-up;};};sdmmc2_b4_b7_od_pins_a: sdmmc2-b4-b7-od-0 {pins {pinmux = <STM32_PINMUX('F', 0, AF10)>, /* SDMMC2_D4 */<STM32_PINMUX('B', 9, AF10)>, /* SDMMC2_D5 */<STM32_PINMUX('C', 6, AF10)>, /* SDMMC2_D6 */ <STM32_PINMUX('C', 7, AF10)>; /* SDMMC2_D7 */slew-rate = <1>;drive-push-pull;bias-pull-up;};}; sdmmc2_b4_sleep_pins_a: sdmmc2-b4-sleep-0 {pins {pinmux = <STM32_PINMUX('B', 14, ANALOG)>, /* SDMMC2_D0 */<STM32_PINMUX('B', 15, ANALOG)>, /* SDMMC2_D1 */<STM32_PINMUX('B', 3, ANALOG)>, /* SDMMC2_D2 */<STM32_PINMUX('B', 4, ANALOG)>, /* SDMMC2_D3 */<STM32_PINMUX('E', 3, ANALOG)>, /* SDMMC2_CK */<STM32_PINMUX('G', 6, ANALOG)>; /* SDMMC2_CMD */};};sdmmc2_b4_b7_sleep_pins_a: sdmmc2-b4-b7-sleep-0 {pins {pinmux = <STM32_PINMUX('F', 0, ANALOG)>, /* SDMMC2_D4 */<STM32_PINMUX('B', 9, ANALOG)>, /* SDMMC2_D5 */<STM32_PINMUX('C', 6, ANALOG)>, /* SDMMC2_D6 */ <STM32_PINMUX('C', 7, ANALOG)>; /* SDMMC2_D7 */};};sdmmc2_clk_pins_a: sdmmc2-clk-0 {pins {pinmux = <STM32_PINMUX('E', 3, AF10)>; /* SDMMC2_CK */slew-rate = <1>;drive-push-pull;bias-pull-up;};};uart4_pins_a: uart4-0 {pins1 {pinmux = <STM32_PINMUX('D', 6, AF8)>; /* UART4_TX */bias-disable;drive-push-pull;slew-rate = <0>;};pins2 {pinmux = <STM32_PINMUX('D', 8, AF8)>; /* UART4_RX */bias-pull-up;};};uart4_idle_pins_a: uart4-idle-0 {pins1 {pinmux = <STM32_PINMUX('D', 6, ANALOG)>; /* UART4_TX */};pins2 {pinmux = <STM32_PINMUX('D', 8, AF8)>; /* UART4_RX */bias-pull-up;};};uart4_sleep_pins_a: uart4-sleep-0 {pins {pinmux = <STM32_PINMUX('D', 6, ANALOG)>, /* UART4_TX */<STM32_PINMUX('D', 8, ANALOG)>; /* UART4_RX */};};
};
3.9 修改Makefile
在源码目录下arch/arm/boot/dts/这个目录里有一个Makefile,找到里面的stm32
dtb-$(CONFIG_ARCH_STM32) += \stm32f429-disco.dtb \stm32f469-disco.dtb \stm32f746-disco.dtb \stm32f769-disco.dtb \stm32429i-eval.dtb \stm32746g-eval.dtb \stm32h743i-eval.dtb \stm32h743i-disco.dtb \stm32h750i-art-pi.dtb \stm32mp135f-dk.dtb \stm32mp135f-dk-a7-examples.dtb \stm32mp151a-prtt1a.dtb \stm32mp151a-prtt1c.dtb \stm32mp151a-prtt1s.dtb \stm32mp153c-dhcom-drc02.dtb \stm32mp153c-dhcor-drc-compact.dtb \stm32mp157a-avenger96.dtb \stm32mp157a-dhcor-avenger96.dtb \stm32mp157a-dk1.dtb \stm32mp157a-dk1-a7-examples.dtb \stm32mp157a-dk1-m4-examples.dtb \stm32mp157a-ed1.dtb \stm32mp157a-ev1.dtb \stm32mp157a-ev1-a7-examples.dtb \stm32mp157a-ev1-m4-examples.dtb \stm32mp157a-iot-box.dtb \stm32mp157a-microgea-stm32mp1-microdev2.0.dtb \stm32mp157a-microgea-stm32mp1-microdev2.0-of7.dtb \stm32mp157a-icore-stm32mp1-ctouch2.dtb \stm32mp157a-icore-stm32mp1-ctouch2-of10.dtb \stm32mp157a-icore-stm32mp1-edimm2.2.dtb \stm32mp157a-stinger96.dtb \stm32mp157c-dhcom-pdk2.dtb \stm32mp157c-dhcom-picoitx.dtb \stm32mp157c-dk2.dtb \stm32mp157c-dk2-a7-examples.dtb \stm32mp157c-dk2-m4-examples.dtb \stm32mp157c-ed1.dtb \stm32mp157c-emsbc-argon.dtb \stm32mp157c-ev1.dtb \stm32mp157c-ev1-a7-examples.dtb \stm32mp157c-ev1-m4-examples.dtb \stm32mp157c-lxa-mc1.dtb \stm32mp157c-odyssey.dtb \stm32mp157d-dk1.dtb \stm32mp157d-dk1-a7-examples.dtb \stm32mp157d-dk1-m4-examples.dtb \stm32mp157d-ed1.dtb \stm32mp157d-ev1.dtb \stm32mp157d-ev1-a7-examples.dtb \stm32mp157d-ev1-m4-examples.dtb \stm32mp157f-dk2.dtb \stm32mp157f-dk2-a7-examples.dtb \stm32mp157f-dk2-m4-examples.dtb \stm32mp157f-ed1.dtb \stm32mp157f-ev1.dtb \stm32mp157f-ev1-a7-examples.dtb \stm32mp157f-ev1-m4-examples.dtb \添加上我们的设备树,或者全删了只留我们自己的设备树
dtb-$(CONFIG_ARCH_STM32) += \stm32mp135-atk.dtb至此,内核所需要修改的文件已全部完成。
四、编译
4.1 配置内核
在这里笔者遇到一个问题,内核编译后直接跑,会提示无法修改CPU主频,然后上网找到了需要配置内核:
/* 打开Linux图形化配置界面 */
make ARCH=arm O="${OUTPUT_BUILD_DIR}" menuconfig->CPU Power Management
->CPU Frequency scaling
->[*] CPU frequency transition statistics
-> Default CPUFreq governor(userspace)
把CPUFreq改为userspace这个选项
cp ../build/.config arch/arm/configs/stm32mp135_atk_defconfig把配置文件保存为我们的默认配置文件,以便下次使用
4.2 编译
/* 编译内核、设备树 */
make ARCH=arm uImage vmlinux dtbs LOADADDR=0xC2000040 O="${OUTPUT_BUILD_DIR}"/* 复制文件到输出文件夹 */
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/uImage ${OUTPUT_BUILD_DIR}/install_artifact/boot/
cp ${OUTPUT_BUILD_DIR}/arch/arm/boot/dts/st*.dtb ${OUTPUT_BUILD_DIR}/install_artifact/boot/这时候查看build/install_artifact/boot文件夹,会发现有刚刚编译好的uImage和stm32mp135-atk.dtb,剩下的烧写就就可以根据原子的详细教程就行了
4.3 nfs挂载根文件系统
这里可能有个小小的坑,在设备树中,ethernet0是eth1,ethernet1是eth2,所以用nfs挂根文件系统的时候,应该选eth0或eth1。反正大家可以多尝试几个。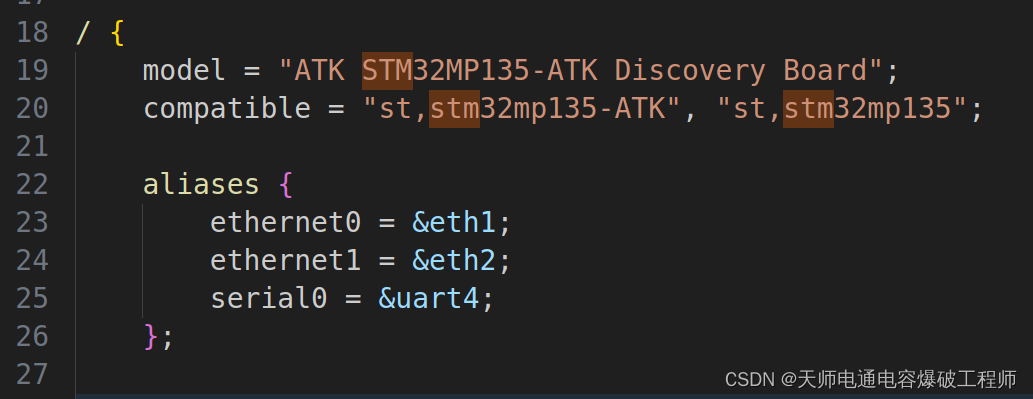
笔者用tftp和nfs启动内核:
setenv bootcmd 'tftp c2000000 uImage;tftp c4000000 stm32mp135-atk.dtb;bootm c2000000 - c4000000'
setenv bootargs 'console=ttySTM0,115200 root=/dev/nfs nfsroot=192.168.1.2:/home/zhangrl/Linux/nfs/rootfs,proto=tcp rw ip=192.168.1.3:192.168.1.2:192.168.1.1:255.255.255.0::eth1:off'4.4 emmc挂根文件系统
烧写到emmc中的时候,先去uboot里查看自己的内核在emmc的哪一个分区,rootfs在哪一个分区:
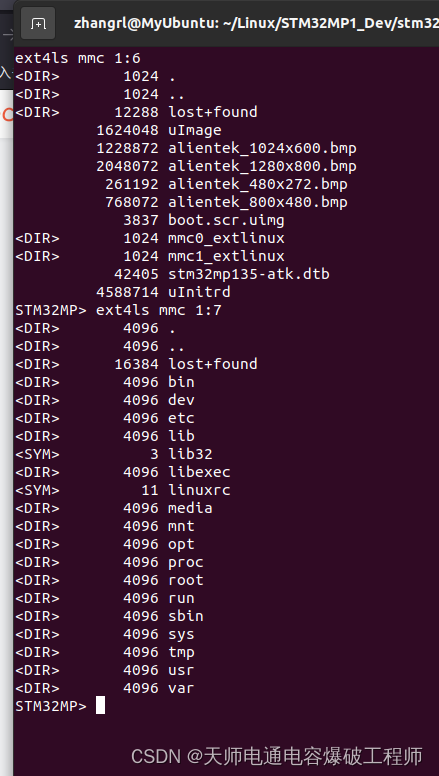
使用ext4ls命令,对一个一个分区进行扫描,直到看到自己的分区(笔者只会这个笨方法)
ext4ls:
第一个参数mmc,设备,选择mmc设备
第二个参数1,选择mmc1,就是我们的emmc
第三个参数,选择分区,一个一个试
知道自己的分区之后,就可以该bootcmd和bootargs:
setenv bootcmd 'ext4load mmc 1:6 c2000000 uImage;ext4load mmc 1:6 c4000000 stm32mp135-atk.dtb;bootm c2000000 - c4000000'
setenv bootargs 'console=ttySTM0,115200 root=/dev/mmcblk1p7 rootwait rw'至此,STM32MP135的全套移植教程完成,补上了正点原子的空白,剩下的根文件系统直接跟正点原子的教程即可,使用buildroot和busybox都可以。笔者今年刚学Linux,从i.mx6ull学完过来,对Linux的理解可能并不到位
如果文章有错误,希望大家指正
相关文章:
(六)正点原子STM32MP135移植——内核移植
目录 一、概述 二、编译官方代码 三、移植 四、编译 一、概述 前面已经移植好了TF-A、optee、u-boot,在u-boot能正常跑起来的情况下,现在来移植内核。 二、编译官方代码 进入kernel目录 2.1 解压源码、打补丁 /* 解压源码 */ tar xf linux-6.1.28.…...

自媒体工作内容管理助手
内容助手 访问地址:editor.yunwow.cn 背景介绍 最近在学习流量运营, 流量运营的第一站是内容创作, 我试过不少原创内容,都是跟生活相关的例如:录一段联琴的视频、录一段秋天的风景、写一段生活感悟、发一段小宠物的生…...

Echarts 教程一
Echarts 教程一 可视化大屏幕适配方案可视化大屏幕布局方案Echart 图表通用配置部分解决方案1. titile2. tooltip3. xAxis / yAxis 常用配置4. legend5. grid6. series7.color Echarts API 使用全局echarts对象echarts实例对象 可视化大屏幕适配方案 rem flexible.js 关于flex…...

【Kubernetes】Kubernetes 对象是什么?
什么是 Kubernetes 对象?常见的 Kubernetes 对象参考🔎感谢 💖 什么是 Kubernetes 对象? Kubernetes 对象是持久化的实体,用于描述整个集群的状态和配置。它们是在 etcd 等持久化存储中存储的,因此它们的状…...

【C++设计模式之模板模式】分析及示例
C之模板模式 描述实现原理示例步骤1步骤1 分析步骤2步骤2 分析调用输出结果 结论 描述 模板模式(Template Pattern)是设计模式中的一种行为型模式。 该模式定义一个操作中的算法骨架,而将具体的算法实现延迟到子类中。 模板模式使得子类可以…...
C#捕捉全局异常
1.运行图片 2.源码 using System; using System.Collections.Generic; using System.Linq; using System.Threading.Tasks; using System.Windows.Forms;namespace 捕捉全局异常 {internal static class Program{/// <summary>/// 应用程序的主入口点。/// </summary…...

java.text.ParseException: Unparseable date: “2023-09-06T09:08:18“
问题描述: java.text.ParseException: Unparseable date: “2023-09-06T09:08:18” 这是在String类型转Date类型出现的错误,主要是String类型时间中间有一个T在转换的过程出现问题. 解决方法: SimpleDateFormat simpleDateFormat new SimpleDateFormat…...

macOS 下如何优雅的使用 Burp Suite 汉化
转载 https://www.sqlsec.com/2019/11/macbp.html 主要内容是根据上面的来的 下面总结个人出现错误的地方 主要是优雅配置方面 不要直接复制粘贴 看清楚人家的内容 下面的可以直接复制粘贴 --add-opensjava.desktop/javax.swingALL-UNNAMED --add-opensjava.base/java.lang…...

进程同步与进程互斥
1.进程同步 知识点回顾: 进程具有异步性的特征。 异步性是指,各并发执行的进程以各自独立的、不可预知的速度向前推进。 如何解决这种异步问题,就是“进程同步”所讨论的内容。 同步亦称直接制约关系,它是指为完成某种任务而建立的两个或多…...

公司安防工程简要介绍及系统需求分析
多年来 从事安保监控领域的经验,在系统的功能要求、设备选型、施 工控制、 后期维护、人员配备等各方面反复论证,最终形成了本方案。在系统 的硬件选择上,把系统的稳定性、安全性、可靠性放在第一位。根据 招标文件的要求选用当今安防行业具…...
JMETER自适应高分辨率的显示器
系列文章目录 历史文章 每天15分钟JMeter入门篇(一):Hello JMeter 每天15分钟JMeter入门篇(二):使用JMeter实现并发测试 每天15分钟JMeter入门篇(三):认识JMeter的逻辑控…...
Linux工具(三)
继Linux工具(一)和Linux工具(二),下面我们就来讲解Linux最后的两个工具,分别是代码托管的版本控制器git和代码调试器gdb。 目录 1.git-版本控制器 从0到1的实现git代码托管 检测并安装git 新建git仓库…...
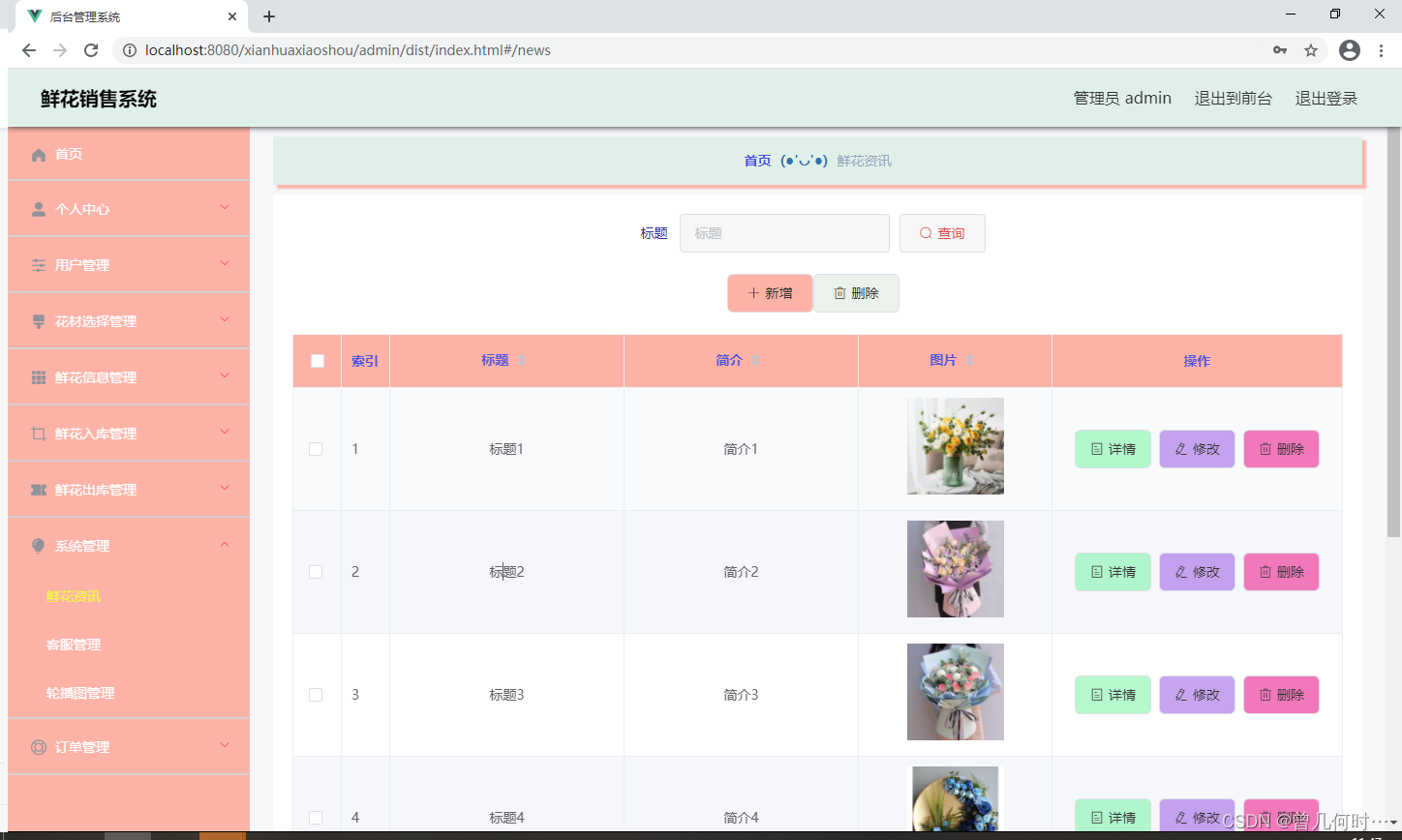
基于SSM+Vue的鲜花销售系统设计与实现
末尾获取源码 开发语言:Java Java开发工具:JDK1.8 后端框架:SSM 前端:采用Vue技术开发 数据库:MySQL5.7和Navicat管理工具结合 服务器:Tomcat8.5 开发软件:IDEA / Eclipse 是否Maven项目&#x…...
矢量图形编辑软件illustrator 2023 mac特点介绍
illustrator 2023 mac是一款矢量图形编辑软件,用于创建和编辑排版、图标、标志、插图和其他类型的矢量图形。 illustrator mac软件特点 矢量图形:illustrator创建的图形是矢量图形,可以无限放大而不失真,这与像素图形编辑软件&am…...
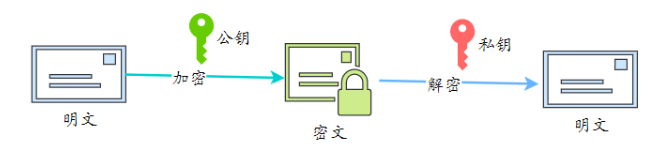
【计算机网络面试题(62道)】
文章目录 计算机网络面试题(62道)基础1.**说下计算机网络体系结构2.说一下每一层对应的网络协议有哪些?3.那么数据在各层之间是怎么传输的呢? 网络综合4.**从浏览器地址栏输入 url 到显示主页的过程?5.说说 DNS 的解析…...
JVM-满老师
JVM 前言程序计数器,栈,虚拟机栈:本地方法栈:堆,方法区:堆内存溢出方法区运行时常量池 垃圾回收垃圾回收算法分代回收 前言 JVM 可以理解的代码就叫做字节码(即扩展名为 .class 的文件ÿ…...
加锁常见的问题
锁其是用来控制在某些场景下让代码串行的工具。我们为了充分利用计算机的硬件性能,发明了多线程,多线程有好处,但同时也有它复杂的一面,必须控制好多个线程的执行,才能驯服这个有能力也有脾气的烈马。 一、加锁范围误区…...

【LeetCode力扣】LCR170 使用归并排序的思想解决逆序对问题(详细图解)
目录 1、题目介绍 2、解题思路 2.1、暴力破解法 2.2、归并排序思想 2.2.1、画图详细讲解 2.2.2、归并排序解决逆序对的代码实现 1、题目介绍 首先阅读题目可以得出要点,即当前数大于后数时则当作一个【逆序对】,而题目是要求在一个数组中计算一共存…...

python经典百题之一个素数能被几个9整除
题目:判断一个素数能被几个9整除。 首先,我们需要明确素数的定义:素数是大于1,且只能被1和自身整除的整数。 下面将分别介绍三种实现方法,每种方法附上解题思路、实现代码、以及优缺点。最后,将对这三种方法进行总结…...

Thymeleaf 内联语法使用教程
1 表达式内联 Thymeleaf标准方言允许使用标签属性(th:)来实现很多的功能,但在有些场景之下,需要将表达式直接写入HTML 代码中和CSS代码中及JavaScript代码中【代码和html文件在一起,分能不开,待验证,有验证的朋友可…...

微信工具箱终极指南:3分钟快速掌握微信自动化管理技巧
微信工具箱终极指南:3分钟快速掌握微信自动化管理技巧 【免费下载链接】wechat-toolbox WeChat toolbox(微信工具箱) 项目地址: https://gitcode.com/gh_mirrors/we/wechat-toolbox 你是否厌倦了手动整理微信通讯录的繁琐?…...
)
保姆级教程:用海思Hi3516EV200的himm命令手动切换IRCUT滤镜(附完整Shell脚本)
海思Hi3516EV200开发板实战:手把手教你用himm命令驱动IRCUT滤镜 在嵌入式视觉项目中,红外截止滤镜(IRCUT)的精准控制往往是决定夜间成像质量的关键。对于使用海思Hi3516EV200开发板的开发者来说,官方文档对GPIO底层操…...

别再只盯着p值了!用GSEA分析RNA-seq数据,如何从海量基因里揪出真正起作用的那条通路?
从海量基因中识别关键通路:GSEA在RNA-seq分析中的实战指南 当面对一份RNA-seq表达矩阵时,许多研究者会陷入一个常见误区——过度依赖p值筛选差异表达基因。这种传统方法可能遗漏那些表达变化虽不显著但协同调控的重要功能通路。本文将带您深入探索基因集…...

用Arduino和MAX30102做个心率血氧仪,从硬件连线到算法调试全流程避坑
从零构建Arduino心率血氧仪:MAX30102实战指南 开篇:为什么选择MAX30102? 在可穿戴健康设备爆发的时代,心率血氧监测已成为智能手环的标配功能。而MAX30102这颗高度集成的光学传感器,正以医用级精度和低功耗特性成为创客…...

你的串口通信稳定吗?STM32CubeMX配置USART1的避坑指南与稳定性测试
STM32串口通信稳定性实战:从配置陷阱到压力测试全解析 当你的嵌入式设备在实验室运行良好,却在现场频繁出现数据丢失或乱码时,问题往往出在那些容易被忽视的细节上。串口通信作为嵌入式系统中最基础的调试与数据交互接口,其稳定性…...

从零到一:在云端服务器安全部署Jupyter Lab/Notebook
1. 云端服务器基础环境准备 刚拿到一台全新的云服务器时,就像搬进毛坯房需要先通水电。我以阿里云ECS为例(其他云服务商操作类似),从系统初始化到基础安全加固,带你走完这段必经之路。 首先用SSH连接服务器时ÿ…...

优化敏感焦虑型依恋
用几个学科的顶层思维,把你的问题重新教育一遍:你不是要“变得迟钝”,你是要完成一次升级:从“敏感地寻找危险”,升级为“敏锐地识别规律”。 从“害怕失去关系”,升级为“有能力经营关系”。 从“被情绪牵…...

LaTeX2Word-Equation:打破学术写作中的公式壁垒
LaTeX2Word-Equation:打破学术写作中的公式壁垒 【免费下载链接】LaTeX2Word-Equation Copy LaTeX Equations as Word Equations, a Chrome Extension 项目地址: https://gitcode.com/gh_mirrors/la/LaTeX2Word-Equation 在学术研究和教育工作中,…...

AI代理协作平台Run402:基于看板与微支付的自动化任务管理
1. 项目概述:一个面向AI代理的协作与支付平台最近在开源社区里,我注意到一个挺有意思的项目,叫musfoner/run402。乍一看,它的描述非常简洁,甚至可以说有些“神秘”,只有“yonathan estudio”几个字。但结合…...

Notflix高级技巧:5种高效搜索和流媒体传输方法
Notflix高级技巧:5种高效搜索和流媒体传输方法 【免费下载链接】notflix Notflix is a shell script to search and stream torrent. 项目地址: https://gitcode.com/gh_mirrors/no/notflix Notflix是一款强大的shell脚本工具,能够帮助用户快速搜…...