ArduPilot开源飞控之AP_Baro_MSP
ArduPilot开源飞控之AP_Baro_MSP
- 1. 源由
- 2. back-end抽象类
- 3. 方法实现
- 3.1 AP_Baro_MSP
- 3.2 update
- 3.3 handle_msp
- 3.4 MSP UART port
- 4. 参考资料
1. 源由
鉴于ArduPilot开源飞控之AP_Baro中涉及Sensor Driver有以下总线类型:
- I2C
- Serial UART
- CAN
- SITL //模拟传感器(暂时并列放在这里)
ArduPilot之开源代码Sensor Drivers设计的front-end / back-end分层设计思路,AP_Baro主要描述的是front-end。
为了更好的从整体理解气压计这个传感器的嵌入式应用,这里深入到back-end驱动层,针对基于MSP协议的气压计设备,进行一个研读和理解。
2. back-end抽象类
AP_Baro_Backend驱动层需实现方法:
- void update()
- static AP_Baro_Backend *probe(AP_Baro &baro, AP_HAL::OwnPtr<AP_HAL::Device> dev)
注:通常来说使用ChibiOS的都有定时器,如果没有定时器,可以使用void accumulate(void)来实现传感器的数据定时获取。
class AP_Baro_Backend
{
public:AP_Baro_Backend(AP_Baro &baro);virtual ~AP_Baro_Backend(void) {};// each driver must provide an update method to copy accumulated// data to the frontendvirtual void update() = 0;// accumulate function. This is used for backends that don't use a// timer, and need to be called regularly by the main code to// trigger them to read the sensorvirtual void accumulate(void) {}void backend_update(uint8_t instance);// Check that the baro valid by using a mean filter.// If the value further that filtrer_range from mean value, it is rejected.bool pressure_ok(float press);uint32_t get_error_count() const { return _error_count; }#if AP_BARO_MSP_ENABLEDvirtual void handle_msp(const MSP::msp_baro_data_message_t &pkt) {}
#endif#if AP_BARO_EXTERNALAHRS_ENABLEDvirtual void handle_external(const AP_ExternalAHRS::baro_data_message_t &pkt) {}
#endif/*device driver IDs. These are used to fill in the devtype fieldof the device ID, which shows up as BARO_DEVID* parameters tousers.*/enum DevTypes {DEVTYPE_BARO_SITL = 0x01,DEVTYPE_BARO_BMP085 = 0x02,DEVTYPE_BARO_BMP280 = 0x03,DEVTYPE_BARO_BMP388 = 0x04,DEVTYPE_BARO_DPS280 = 0x05,DEVTYPE_BARO_DPS310 = 0x06,DEVTYPE_BARO_FBM320 = 0x07,DEVTYPE_BARO_ICM20789 = 0x08,DEVTYPE_BARO_KELLERLD = 0x09,DEVTYPE_BARO_LPS2XH = 0x0A,DEVTYPE_BARO_MS5611 = 0x0B,DEVTYPE_BARO_SPL06 = 0x0C,DEVTYPE_BARO_UAVCAN = 0x0D,DEVTYPE_BARO_MSP = 0x0E,DEVTYPE_BARO_ICP101XX = 0x0F,DEVTYPE_BARO_ICP201XX = 0x10,DEVTYPE_BARO_MS5607 = 0x11,DEVTYPE_BARO_MS5837 = 0x12,DEVTYPE_BARO_MS5637 = 0x13,DEVTYPE_BARO_BMP390 = 0x14,};protected:// reference to frontend objectAP_Baro &_frontend;void _copy_to_frontend(uint8_t instance, float pressure, float temperature);// semaphore for access to shared frontend dataHAL_Semaphore _sem;virtual void update_healthy_flag(uint8_t instance);// mean pressure for range filterfloat _mean_pressure; // number of dropped samples. Not used for now, but can be usable to choose more reliable sensoruint32_t _error_count;// set bus ID of this instance, for BARO_DEVID parametersvoid set_bus_id(uint8_t instance, uint32_t id) {_frontend.sensors[instance].bus_id.set(int32_t(id));}
};
3. 方法实现
由于气压数据来自串口,因此,其逻辑相对简单,没有校准等复杂物理公式。
3.1 AP_Baro_MSP
实例初始化。
AP_Baro_MSP::AP_Baro_MSP├──> msp_instance = _msp_instance;├──> instance = _frontend.register_sensor();└──> set_bus_id(instance, AP_HAL::Device::make_bus_id(AP_HAL::Device::BUS_TYPE_MSP,0,msp_instance,0));
3.2 update
front-end / back-end数据更新。
AP_Baro_MSP::update└──> <count>├──> WITH_SEMAPHORE(_sem);├──> _copy_to_frontend(instance, sum_pressure/count, sum_temp/count);├──> sum_pressure = sum_temp = 0;└──> count = 0;
3.3 handle_msp
处理MSP协议中气压数据。
AP_Baro_MSP::handle_msp├──> <pkt.instance != msp_instance> // not for us│ └──> return;├──> WITH_SEMAPHORE(_sem);├──> sum_pressure += pkt.pressure_pa;├──> sum_temp += pkt.temp*0.01;└──> count++;typedef struct PACKED {uint8_t instance;uint32_t time_ms;float pressure_pa;int16_t temp; // centi-degrees C
} msp_baro_data_message_t;
3.4 MSP UART port
满足MSP协议格式,参考:BetaFlight模块设计之三十二:MSP协议模块分析
AP_Vehicle::setup└──> AP_MSP::init└──> AP_MSP::loop //thread_create└──> AP_MSP_Telem_Backend::process_incoming_data└──> AP_MSP_Telem_Backend::msp_process_received_command└──> AP_MSP_Telem_Backend::msp_process_command└──> AP_MSP_Telem_Backend::msp_process_sensor_command└──> AP_MSP_Telem_Backend::msp_handle_baro└──> AP_Baro::handle_msp└──> AP_Baro_MSP::handle_msp
4. 参考资料
【1】ArduPilot开源飞控系统之简单介绍
【2】ArduPilot之开源代码Task介绍
【3】ArduPilot飞控启动&运行过程简介
【4】ArduPilot之开源代码Library&Sketches设计
【5】ArduPilot之开源代码Sensor Drivers设计
相关文章:

ArduPilot开源飞控之AP_Baro_MSP
ArduPilot开源飞控之AP_Baro_MSP 1. 源由2. back-end抽象类3. 方法实现3.1 AP_Baro_MSP3.2 update3.3 handle_msp3.4 MSP UART port 4. 参考资料 1. 源由 鉴于ArduPilot开源飞控之AP_Baro中涉及Sensor Driver有以下总线类型: I2CSerial UARTCANSITL //模拟传感器(…...

openGauss学习笔记-94 openGauss 数据库管理-访问外部数据库-mysql_fdw
文章目录 openGauss学习笔记-94 openGauss 数据库管理-访问外部数据库-mysql_fdw94.1 编译mysql_fdw94.2 使用mysql_fdw94.3 常见问题94.4 注意事项 openGauss学习笔记-94 openGauss 数据库管理-访问外部数据库-mysql_fdw openGauss的fdw实现的功能是各个openGauss数据库及远程…...
UML图 - 类图(Class Diagram)
类图是描述系统中的类,以及各个类之间的关系的静态视图。能够让我们在正确编写代码以前对系统有一个全面的认识。类图是一种模型类型,确切的说,是一种静态模型类型。类图表示类、接口和它们之间的协作关系。 类图的结构 类一般由三部分组成&…...

sheng的学习笔记-【中文】【吴恩达课后测验】Course 2 - 改善深层神经网络 - 第二周测验
课程2_第2周_测验题 目录:目录 第一题 1.当输入从第8个mini-batch的第7个的例子的时候,你会用哪种符号表示第3层的激活? A. 【 】 a [ 3 ] { 8 } ( 7 ) a^{[3]\{8\}(7)} a[3]{8}(7) B. 【 】 a [ 8 ] { 7 } ( 3 ) a^{[8]\{7\}(3)} a…...
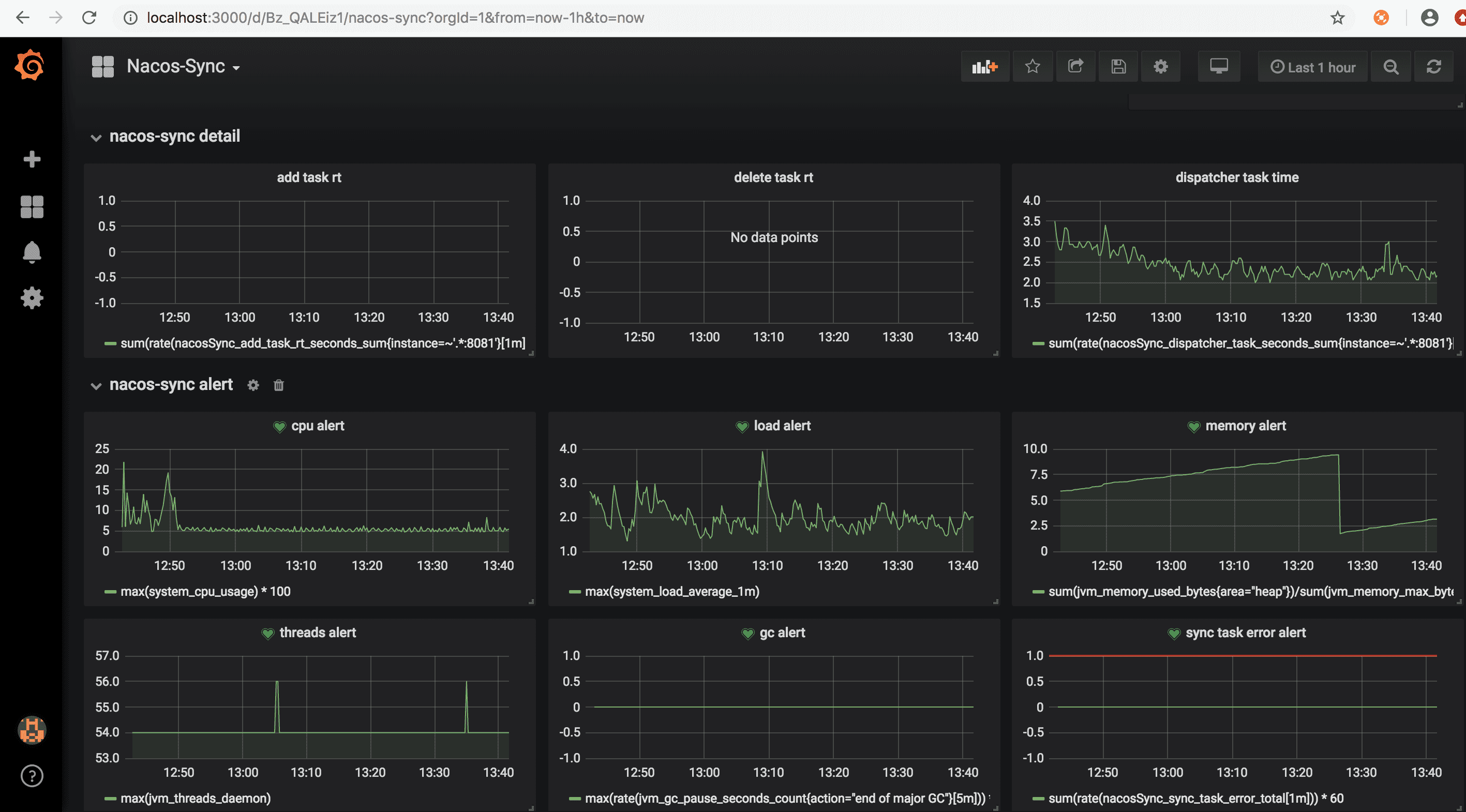
Nacos 监控手册
Nacos 0.8.0版本完善了监控系统,支持通过暴露metrics数据接入第三方监控系统监控Nacos运行状态,目前支持prometheus、elastic search和influxdb,下面结合prometheus和grafana如何监控Nacos。与elastic search和influxdb结合可自己查找相关资料…...
项目需求分析5大常见问题及解决方案
需求分析过程中,往往容易导致需求不准确和不完整,引起需求频繁变更,导致项目进度延误和成本增加;而需求分析的误解问题,导致交付产品无法满足客户期待,降低用户满意度和资源浪费。 那么在需求分析中&#x…...
C#学习系列相关之多线程(四)----async和await的用法
一、async、await用法的作用 async用法主要是用来作为修饰符将方法作为异步方法使用,await关键字只用作为在异步方法才能使用,也就是只有当方法有async修饰后,才能在方法中使用await,await后跟Task新的任务启动。(awai…...

极智AI | 大模型优化之KV Cache
欢迎关注我的公众号 [极智视界],获取我的更多经验分享 大家好,我是极智视界,本文来介绍一下 大模型优化之KV Cache。 邀您加入我的知识星球「极智视界」,星球内有超多好玩的项目实战源码下载,链接:https://t.zsxq.com/0aiNxERDq 在大模型的优化中经常会听到的一个技术叫…...
 打开系统相册或相机获取图像)
Android 使用 registerForActivityResult() 打开系统相册或相机获取图像
一、简介 当使用了 AndroidX 后,发现 startActivityForResult() 标记为过时了,而是推荐我们使用 registerForActivityResult() 函数。 registerForActivityResult() 函数是 Android 中用于启动 Activity 结果回调的新方式。这个函数的目的是简化在 Act…...

如何制作网页 ico
1. 制作 icon 可以通过 https://www.iconfont.cn/collections/detail?spma313x.7781069.1998910419.de12df413&cid13720 或者自己在 PPT 制作,然后截图导出png 文件。 2. 转换为 ico 文件 使用:https://www.bitbug.net/ 上传并且转换成自己要的…...
)
golang gorm 增删改查以及使用原生SQL(以操作mysql为例)
gorm mysql增删改查 model定义 package _caseimport "gorm.io/gorm"func init() {DB.Migrator().AutoMigrate(Teacher{}, Course{}) } type Roles []stringtype Teacher struct {gorm.ModelName string gorm:"size:256"Email string gorm:&q…...

代码随想录 单调栈part2
503. 下一个更大元素 II 给定一个循环数组 nums ( nums[nums.length - 1] 的下一个元素是 nums[0] ),返回 nums 中每个元素的 下一个更大元素 。 数字 x 的 下一个更大的元素 是按数组遍历顺序,这个数字之后的第一个比它更大的数…...

详解利用高斯混合模型拆解多模态分布 + 精美可视化
文章目录 一、前言二、主要内容三、总结🍉 CSDN 叶庭云:https://yetingyun.blog.csdn.net/ 一、前言 本文旨在介绍如何利用高斯混合模型(Gaussian Mixture Models,简称 GMMs)将一维多模态分布拆分为多个分布。作为统计 / / /机器学习领域常用的概率模型...
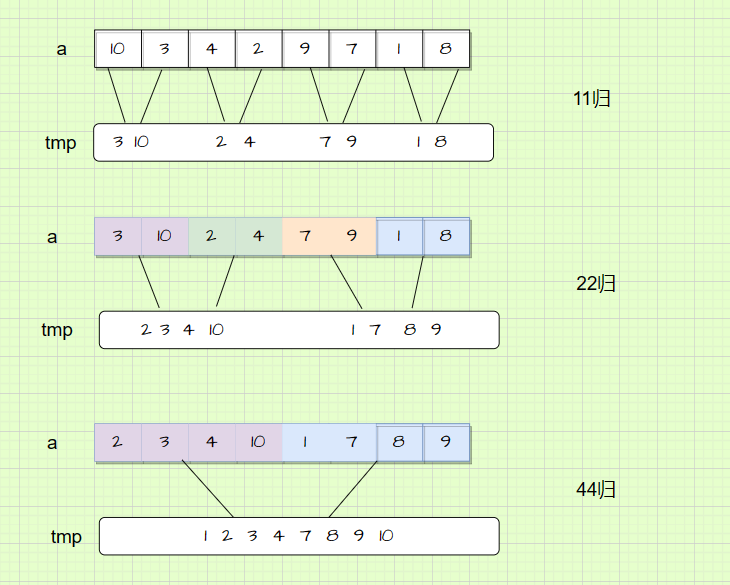
排序算法之【归并排序】
📙作者简介: 清水加冰,目前大二在读,正在学习C/C、Python、操作系统、数据库等。 📘相关专栏:C语言初阶、C语言进阶、C语言刷题训练营、数据结构刷题训练营、有感兴趣的可以看一看。 欢迎点赞 👍…...
Qt中QTimer定时器的用法
Qt中提供了两种定时器的方式一种是使用Qt中的事件处理函数,另一种就是Qt中的定时器类QTimer。 使用QTimer类,需要创建一个QTimer类对象,然后调用其start()方法开启定时器,此后QTimer对象就会周期性的发出timeout()信号。 1.QTimer…...

vue-组件定义注册使用
vue组件使用的步骤 定义组件注册组件使用组件 定义组件 Vue.extend(options) 其中options和new Vue(options)出入的options对象几乎一样,但是也有不同。 创建 el不用写—最终所有组件需要经过一个vm的管理,由vm的el决定服务哪个容器。 data必须写成函…...

斑馬打印機打印中文
创建项目 首先說一下,本文章是借鉴了其他大佬的文章,然后我记录一下的文章。 首先创建好一个.net framework的winform项目。 这里面主要用到两个库文件: Fnthex32.dll、LabelPrint.dll。 Fnthex32这个有8位参数和9位参数的,我这…...

(一)Apache log4net™ 手册 - 介绍
0、相关概念 Log4j 几乎每个大型应用程序都包含自己的日志记录或跟踪 API。根据这一规则,E.U. SEMPER 🌹项目决定编写自己的跟踪 API。那是在 1996 年初。经过无数次的增强、几个化身和大量的工作,API 已经发展成为 log4j —— 一个流行的 Ja…...
基于Java的民宿管理系统设计与实现(源码+lw+部署文档+讲解等)(民宿预约、民宿预订、民宿管理、酒店预约通用)
文章目录 前言具体实现截图论文参考详细视频演示代码参考源码获取 前言 💗博主介绍:✌全网粉丝10W,CSDN特邀作者、博客专家、CSDN新星计划导师、全栈领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java、小程序技…...
039:mapboxGL更换地图上的鼠标样式
第039个 点击查看专栏目录 本示例的目的是介绍演示如何在vue+mapbox中更换地图上的鼠标的样式。 直接复制下面的 vue+mapbox源代码,操作2分钟即可运行实现效果 文章目录 示例效果配置方式示例源代码(共74行)相关API参考:专栏目标示例效果 配置方式 1)查看基础设置:htt…...

Arduino与WS2812B打造智能节日彩灯:从硬件连接到编程实战
1. 项目概述:从零到一,点亮你的节日氛围又到年底了,各种节日接踵而至,无论是圣诞、元旦还是春节,家里总感觉少了点氛围感。买来的成品彩灯,要么模式单一,要么造型固定,总感觉差点意思…...

10倍效率提升!词达人自动化助手:告别枯燥词汇练习的终极解决方案
10倍效率提升!词达人自动化助手:告别枯燥词汇练习的终极解决方案 【免费下载链接】cdr 微信词达人,高正确率,高效简洁。支持班级任务及自选任务 项目地址: https://gitcode.com/gh_mirrors/cd/cdr 你是否厌倦了每周在词达人…...

咸鱼大量流出430元几乎全新联想迷你图形工作站小主机,支持8-9代标压处理器,最高双NVME+2.5寸SATA三盘位,还可选配独立显卡!
相比于普通小主机,工作站主机产品在性能以及扩展方面更有看点,可玩性高的不是一点,两点。即使是过时淘汰的古董机器,价位也是居高不下,贩子控价原因是一方面,还有法拉利老了也是法拉利,捡垃圾也…...

Lenovo Legion Toolkit:拯救者笔记本的终极性能优化指南
Lenovo Legion Toolkit:拯救者笔记本的终极性能优化指南 【免费下载链接】LenovoLegionToolkit Lightweight Lenovo Vantage and Hotkeys replacement for Lenovo Legion laptops. 项目地址: https://gitcode.com/gh_mirrors/le/LenovoLegionToolkit 你是否曾…...

物业临时工考勤记录管理痛点与栎偲考勤神器技术实现方案
物业行业临时工考勤一直是HR管理的“老大难”:人员流动性大、班次碎片化(如早班/晚班/临时替班)、外勤打卡场景多(如园区巡检、设备维修),传统Excel统计不仅耗时,还常因数据错漏引发薪资纠纷。本…...

7B秒杀70B!大模型微调秘籍全解:从理论到实战,玩转高效适配!
本文系统介绍了大模型微调的理论框架与实践流程。阐述了微调的必要性,即弥补通用大模型在领域知识、输出格式及行为对齐上的不足,并说明微调效果可超越更大参数的未微调模型。文章深入解析了微调原理,对比了全参数微调与高效微调(…...

NotebookLM概念关联分析全链路解析,从原始文本到可验证知识网络的6大断点与修复方案
更多请点击: https://intelliparadigm.com 第一章:NotebookLM概念关联分析全链路解析概览 NotebookLM 是 Google 推出的基于 LLM 的实验性研究辅助工具,其核心能力在于对用户上传的文档(PDF、TXT、网页等)进行语义理…...

慕尼黑电子展深度攻略:从技术侦察到资源对接的实战指南
1. 展会项目概述与核心价值解析又到了一年一度的行业盛会密集期,对于身处电子、嵌入式、物联网这些硬科技赛道的从业者来说,参加一场高质量的线下展会,其价值远不止是“逛一逛”那么简单。它更像是一次集中的行业体检、一次高效的技术社交和一…...

【声纳技术手册】3 三维水声传播的快速计算:从海底山脉到水平折射
三维水声传播的快速计算:从海底山脉到水平折射 副标题:当我们在深海中"听见"一座山——3D射线追踪、Normal Mode Coupling与剪切波效应的直觉之旅 写在前面:为什么我们需要三维? 别急,我们先从一个你熟悉的场景开始想象。 想象你站在一个巨大的游泳池边,水面…...

办公Agent从0到1落地指南,5个步骤 + 6个避坑
大家好,我是小悟。 一、核心逻辑:Agent不是“对话机器人”,而是“数字执行者” 很多团队误以为采购了某个AI助手(如会议纪要工具、代码生成插件)就是引进了Agent。真正的办公Agent具备“感知-决策-执行”闭环ÿ…...