鱼眼相机去畸变(图像拉直/展开/矫正)算法及实战总结
本文介绍两种方法
1、经纬度矫正法
2、棋盘格矫正法
一、经纬度矫正法

1、算法说明
经纬度矫正法, 可以把鱼眼图想象成半个地球, 然后将地球展开成地图,经纬度矫正法主要是利用几何原理, 对图像进行展开矫正。
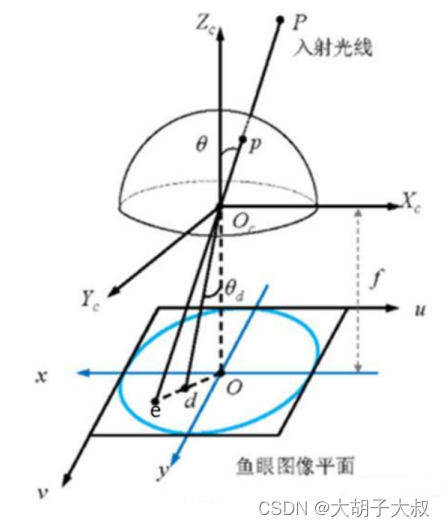
经过P点的入射光线没有透镜的话,本应交于相机成像平面的e点。然而,经过鱼眼相机的折射,光线会交于相机成像平面的d点,就产生了畸变,因此畸变图像整体上呈现出像素朝图像中心点聚集的态势。
而去畸变,就是将折射到d点的点,重新映射回到e点,因此去畸变之后的图像与原始的鱼眼图像相比,仿佛是把向心聚集的像素又重新向四周铺展开来。
详细的推导流程及公式见地址:AVM环视系统——鱼眼相机去畸变算法 - 知乎
2、 代码
import math
from PIL import Imageim = Image.open("/Users/Fisheye_photo-600x600.jpg")
im.show()width, high = im.size
sqrt_len = min(width, high)
im = im.transform((sqrt_len, sqrt_len),Image.EXTENT,((width-sqrt_len)/2, (high-sqrt_len)/2, sqrt_len+(width-sqrt_len)/2, sqrt_len+(high-sqrt_len)/2))
width = high = sqrt_lenidata = im.getdata()
odata = []alpha = math.pi/2out_high = round(high * math.tan(alpha/2))
out_width = round(width * math.tan(alpha/2))
out_radius = round(high * math.tan(alpha/2))
out_center_x = out_width / 2
out_center_y = out_high / 2out_bl_x = 0
out_br_x = out_width - 1
out_bt_y = 0
out_bb_y = out_high - 1out_bl_cx = out_bl_x - out_center_x
out_br_cx = out_br_x - out_center_x
out_bt_cy = out_bt_y - out_center_y
out_bb_cy = out_bb_y - out_center_ysrc_radius = round(high * math.sin(alpha/2))
src_center_x = width / 2
src_center_y = high / 2for i in range(0, high * width):ox = math.floor(i / out_width)oy = i % out_highcx = ox - out_center_x;cy = oy - out_center_y;out_distance = round(math.sqrt(pow(cx, 2) + pow(cy, 2)))theta = math.atan2(cy, cx)if (-math.pi/4 <= theta <= math.pi/4):bx = out_radius * math.cos(math.pi/4)by = bx * math.tan(theta)elif (math.pi/4 <= theta <= math.pi*3/4):by = out_radius * math.sin(math.pi/4)bx = by / math.tan(theta)elif (-math.pi*3/4 <= theta <= -math.pi/4):by = out_radius * math.sin(-math.pi/4)bx = by / math.tan(theta)else:bx = out_radius * math.cos(-math.pi*3/4)by = bx * math.tan(theta)bdy_distance = round(math.sqrt(pow(cx, 2) + pow(cy, 2)))src_distance = src_radius * bdy_distance / out_radiussrc_x = round(src_center_x + math.cos(theta) * src_distance)src_y = round(src_center_y + math.sin(theta) * src_distance)src_idx = src_x*width + src_y if(0 < src_idx < high*width):odata.append(idata[src_idx])else:odata.append((0,0,0))om = Image.new("RGB", (high, width))
om.putdata(odata)
om.show()3、代码及图片地址:GitHub - duducosmos/defisheye: Fast Corrects for fisheye distortion in an image.
二、棋盘格矫正方法
1、算法说明
利用棋盘格进行标定, 然后计算鱼眼镜头的畸变系数以及内参, opencv中自带有fisheye模块, 可以直接根据棋盘格标定结果,采用cv2.fisheye.calibrate计算畸变系数以及内参, 然后使用cv2.fisheye.initUndistortRectifyMap函数计算映射矩阵, 最后根据映射矩阵, 使用cv2.remap进行矫正。
2、代码
import cv2
import numpy as np
import math
import time# 鱼眼有效区域截取
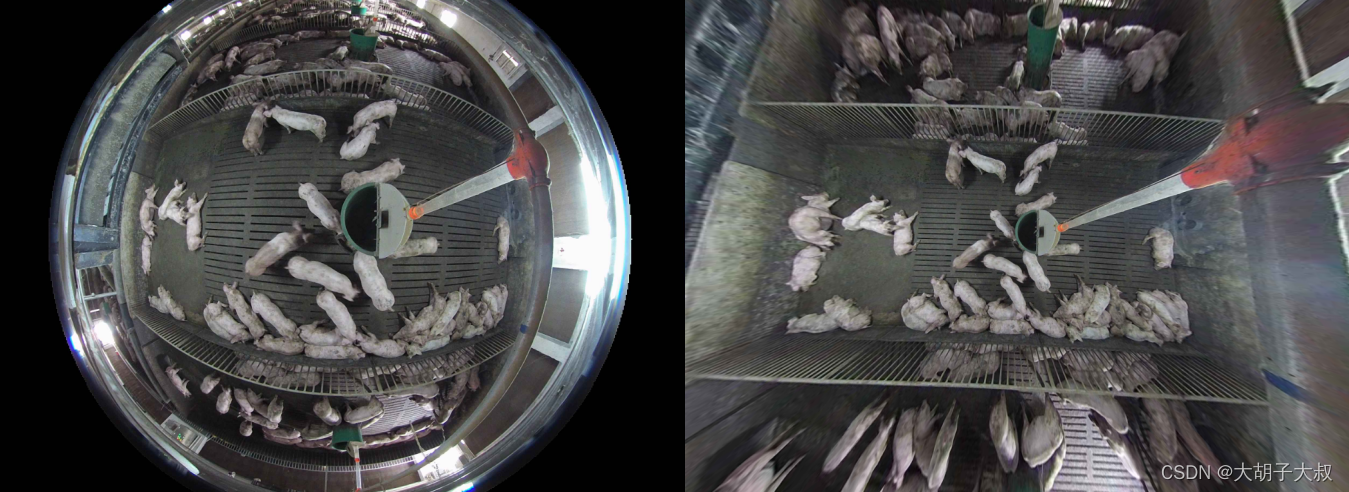
def cut(img):img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)(_, thresh) = cv2.threshold(img_gray, 20, 255, cv2.THRESH_BINARY)contours, hierarchy = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)cnts = sorted(contours, key=cv2.contourArea, reverse=True)[0]x,y,w,h = cv2.boundingRect(cnts)r = max(w/ 2, h/ 2)# 提取有效区域img_valid = img[y:y+h, x:x+w]return img_valid, int(r)# 鱼眼矫正
def undistort(src,r):# r: 半径, R: 直径R = 2*r# Pi: 圆周率Pi = np.pi# 存储映射结果dst = np.zeros((R, R, 3))src_h, src_w, _ = src.shape# 圆心x0, y0 = src_w//2, src_h//2for dst_y in range(0, R):theta = Pi - (Pi/R)*dst_ytemp_theta = math.tan(theta)**2for dst_x in range(0, R):# 取坐标点 p[i][j]# 计算 sita 和 fiphi = Pi - (Pi/R)*dst_xtemp_phi = math.tan(phi)**2tempu = r/(temp_phi+ 1 + temp_phi/temp_theta)**0.5tempv = r/(temp_theta + 1 + temp_theta/temp_phi)**0.5if (phi < Pi/2):u = x0 + tempuelse:u = x0 - tempuif (theta < Pi/2):v = y0 + tempvelse:v = y0 - tempvif (u>=0 and v>=0 and u+0.5<src_w and v+0.5<src_h):dst[dst_y, dst_x, :] = src[int(v+0.5)][int(u+0.5)]# 计算在源图上四个近邻点的位置# src_x, src_y = u, v# src_x_0 = int(src_x)# src_y_0 = int(src_y)# src_x_1 = min(src_x_0 + 1, src_w - 1)# src_y_1 = min(src_y_0 + 1, src_h - 1)## value0 = (src_x_1 - src_x) * src[src_y_0, src_x_0, :] + (src_x - src_x_0) * src[src_y_0, src_x_1, :]# value1 = (src_x_1 - src_x) * src[src_y_1, src_x_0, :] + (src_x - src_x_0) * src[src_y_1, src_x_1, :]# dst[dst_y, dst_x, :] = ((src_y_1 - src_y) * value0 + (src_y - src_y_0) * value1 + 0.5).astype('uint8')return dstif __name__ == "__main__":t = time.perf_counter()frame = cv2.imread('../imgs/pig.jpg')cut_img,R = cut(frame)result_img = undistort(cut_img,R)cv2.imwrite('../imgs/pig_nearest.jpg',result_img)print(time.perf_counter()-t)效果图
 3、代码地址
3、代码地址
https://github.com/HLearning/fisheye
三、总结:比对两个算法
本人用两个算法对一张图像进行拉直,发现经过经纬度矫正算法生成的图像原作者裁剪掉了边缘部分,见下图效果图,中间黑框内的图像是经过“经纬度矫正法”得到的效果图,外面的大图是用“棋盘格矫正法”得到的效果图

为了更直观,更改了图像的透明度,可以看出两个算法的效果还是多少有些差别的。
其实,两个算法的边缘部分都被严重拉伸,丢不丢掉看适用场景和个人需要吧。
四、知识拓展
立体标定
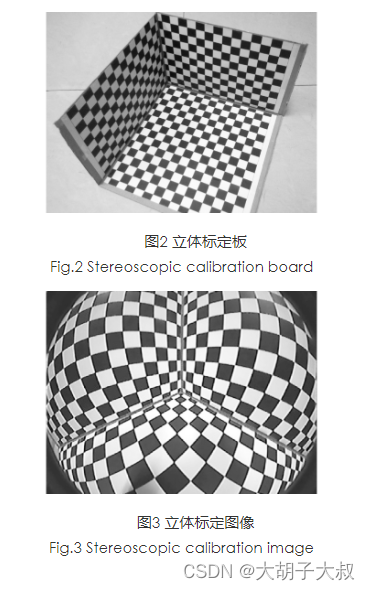
算法说明
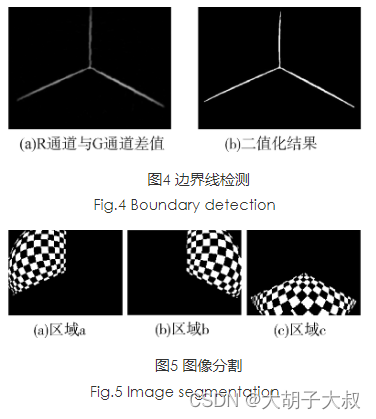
坐标映射建立,各区域的角点都有一维世界坐标为0,对应图5中三幅子图像分别为Y=0,X=0,Z=0。根据棋盘方格边长以及与世界坐标原点间隔的方格数,可得到所有角点的世界坐标。从而建立起二维图像坐标与三维世界坐标的一一映射,用于模型参数的求解。
参考地址:采用立体标定板的鱼眼相机快速标定方法_真空技术_新闻动态_深圳市鼎达信装备有限公司
基于双经度模型的鱼眼图像畸变矫正方法
基于双经度模型的鱼眼图像畸变矫正方法 - 百度文库
相关文章:
鱼眼相机去畸变(图像拉直/展开/矫正)算法及实战总结
本文介绍两种方法 1、经纬度矫正法 2、棋盘格矫正法 一、经纬度矫正法 1、算法说明 经纬度矫正法, 可以把鱼眼图想象成半个地球, 然后将地球展开成地图,经纬度矫正法主要是利用几何原理, 对图像进行展开矫正。 经过P点的入射光线…...

es6 数据类型
es6 数据类型 map 数据类型 >Map 对象保存键值对。 用途 : Object的key无法支持该数据时需要了解对象大小时 map 数据类型任何值(对象或者原始值) 都可以作为一个键。 Object 的键只能是字符串 let myMap new Map(); let myMap1 new Map(); var keyStrin…...
【postgresql】
看到group by 1,2 和 order by 1, 2。看不懂,google,搜到了Stack Overflow 上有回答 What does SQL clause “GROUP BY 1” mean? 大概意思就是,group by, order by 后面跟数字,指的是 selec…...

【C++】空间配置器 allocator:原理及底层解析
文章目录 空间配置器一级空间配置器二级空间配置器1. 内存池2. SGI-STL中二级空间配置器设计 - - 哈希桶3. 二级空间配置器的空间申请 空间配置器的默认选择空间配置器的在封装:添加了数据类型大小空间配置器对象的构造与析构 容器中的 allocator 空间配置器 提到空…...
微信小程序 movable-area 区域拖动动态组件演示
movable-area 组件在小程序中的作用是用于创建一个可移动的区域,可以在该区域内拖动视图或内容。这个组件常用于实现可拖动的容器或可滑动的列表等交互效果。 使用 movable-area 组件可以对其内部的 movable-view 组件进行拖动操作,可以通过设置不同的属…...

隔离上网,安全上网
SDC沙盒数据防泄密系统(安全上网,隔离上网) •深信达SDC沙盒数据防泄密系统,是专门针对敏感数据进行防泄密保护的系统,根据隔离上网和安全上网的原则实现数据的代码级保护,不会影响工作效率,不…...

NOSQL Redis 数据持久化 RDB、AOF(二) 恢复
redis 执行flushall 或 flushdb 也会产生dump.rdb文件,但里面是空的。 注意:千万执行,不然rdb文件会被覆盖的。 dump.rdb 文件如何恢复数据 讲备份文件 dump.rdb 移动到redis安装目录并启动服务即可。 dump.rdb 自动触发 和手动触发 自…...
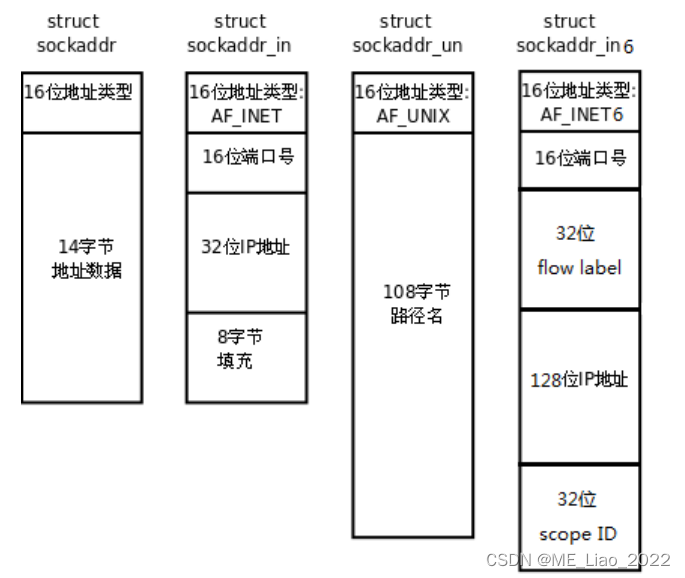
UDP通信
UDP通信 #include <sys/types.h> #include <sys/socket.h> ssize_t sendto(int sockfd, const void *buf, size_t len, int flags,const struct sockaddr *dest_addr, socklen_t addrlen); - 参数:- sockfd : 通信的fd- buf : 要发送的数据- len : 发送…...
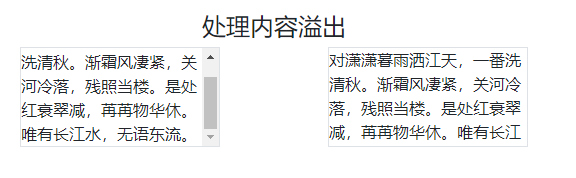
Bootstrap对溢出内容的两种处理:滚动条和隐藏两种方式
Bootstrap中定义了以下两个类来处理内容溢出的情况: 类overflow-auto:在固定宽度和高度的元素上,如果内容溢出了元素,将生成一个垂直滚动条,通过滚动条可以查看溢出的内容。 类overflow-hidden:在固定宽度和高度的元素…...
elasticsearch基本语法
这里写自定义目录标题 elasticsearch简介基本语法索引创建索引修改索引删除索引 查询简单查询精确查询条件查询范围查询:聚合查询:排序和分页: 参考文献: elasticsearch简介 Elasticsearch 是一个开源的分布式搜索和分析引擎&…...

Maven Spring jar包启动报错 排查
Maven Spring jar包启动报错排查 背景 maven 编译jar包,放在linux服务器启动不起来,提示:xxxx-0.0.1-SNAPSHOT.jar中没有主清单属性 原因 pom 配置文件,多了 <skip>true</skip> <build><plugins>&l…...

LeetCode-2485-找出中枢整数
题目描述: 给你一个正整数 n ,找出满足下述条件的 中枢整数 x : 1 和 x 之间的所有元素之和等于 x 和 n 之间所有元素之和。 返回中枢整数 x 。如果不存在中枢整数,则返回 -1 。题目保证对于给定的输入,至多存在一个中…...
)
nano pi m1配置脚本(全志H3)
为nanopi m1写一个自动配置脚本,简化自己的操作 配置:H3芯片,1G内存,64G卡 系统:friendlycore focal 4.14版本 一、系统安装 烧录系统后,插入机器,但是使用df -ih发现只有900K的nodesÿ…...
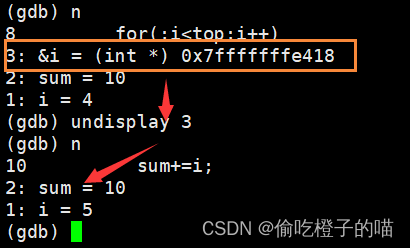
linux--gdb的使用
1,Makefile默认release版本,要想进入debug版本需添加-g后缀 2,进入调试界面:gdb 可执行程序 3,显示代码:l(list) 数字(1/0) 不停回车可一直显示到结束并显…...
JVM命令行监控工具
JVM命令行监控工具 概述 性能诊断是软件工程师在日常工作中需要经常面对和解决的问题,在用户体验至上的今天,解决好应用的性能问题能带来非常大的收益。 Java作为最流行的编程语言之一,其应用性能诊断一直受到业界广泛关注,可能…...

系统架构设计:4 论微服务架构及其应用
目录 一 微服务架构 1 微服务 2 微服务架构的优点 3微服务面临的挑战...
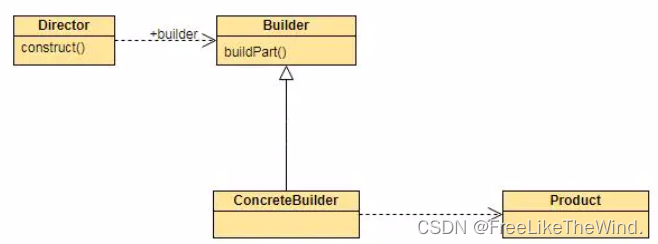
【C++设计模式之建造者模式:创建型】分析及示例
简介 建造者模式(Builder Pattern)是一种创建型设计模式,它将复杂对象的构建过程与其表示分离,使得同样的构建过程可以创建不同的表示。 描述 建造者模式通过将一个复杂对象的构建过程拆分成多个简单的部分,并由不同…...
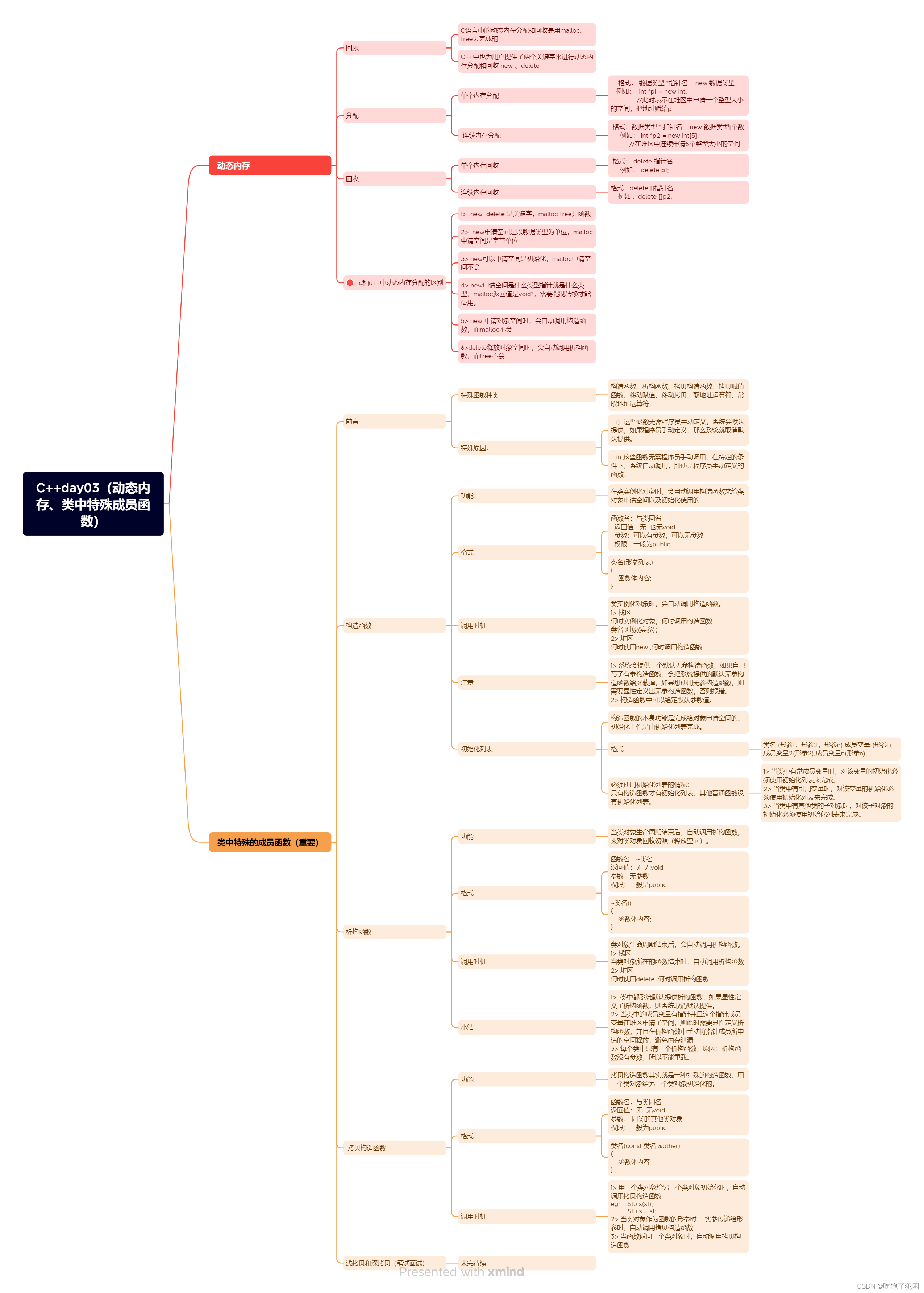
C++day03(动态内存、类中特殊成员函数)
今日任务 1> 思维导图 2> 设计一个Per类,类中包含私有成员:姓名、年龄、指针成员身高、体重,再设计一个Stu类,类中包含私有成员:成绩、Per类对象p1,设计这两个类的构造函数、析构函数和拷贝构造函数。 代码: …...

【Leetcode】179. 最大数
一、题目 1、题目描述 给定一组非负整数 nums,重新排列每个数的顺序(每个数不可拆分)使之组成一个最大的整数。 注意:输出结果可能非常大,所以你需要返回一个字符串而不是整数。 示例1: 输入:nums = [10,2] 输出:"210"示例2: 输入:nums = [3,30,34,5…...

ArduPilot开源飞控之AP_Baro_MSP
ArduPilot开源飞控之AP_Baro_MSP 1. 源由2. back-end抽象类3. 方法实现3.1 AP_Baro_MSP3.2 update3.3 handle_msp3.4 MSP UART port 4. 参考资料 1. 源由 鉴于ArduPilot开源飞控之AP_Baro中涉及Sensor Driver有以下总线类型: I2CSerial UARTCANSITL //模拟传感器(…...

基于Unsloth与LoRA的高效大语言模型微调工程化实践指南
1. 项目概述:一个为Unsloth优化的AI开发伴侣 如果你最近在折腾大语言模型(LLM)的微调,尤其是想在自己的消费级显卡上跑起来,那你大概率听说过或者正在用Unsloth。这个开源库通过一系列巧妙的优化(比如融合…...

英雄联盟录像编辑完整教程:5分钟掌握League Director专业工具
英雄联盟录像编辑完整教程:5分钟掌握League Director专业工具 【免费下载链接】leaguedirector League Director is a tool for staging and recording videos from League of Legends replays 项目地址: https://gitcode.com/gh_mirrors/le/leaguedirector …...

LinkSwift:终极免费网盘直链下载助手完整使用指南
LinkSwift:终极免费网盘直链下载助手完整使用指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘…...

LangGraph入门:构建有状态的AI Agent工作流
LangGraph 入门:用状态图构建 Agent手写 ReAct 循环容易写出 bug。LangGraph 用「状态图」的方式定义 Agent,把每一步定义为一个节点,跳转逻辑定义为边——清晰、可测试、可扩展。一、为什么需要 LangGraph 手写 Agent 循环的痛点:…...

【免费下载】 Airplayer:苹果设备投屏的终极解决方案
Airplayer:苹果设备投屏的终极解决方案 【下载地址】Airplayer苹果投屏软件 Airplayer是一款专为苹果设备设计的高效投屏软件,它允许用户轻松地将iPhone或iPad屏幕的内容无线传输到电脑上显示。无论是播放视频、展示照片、进行会议演示还是游戏分享&…...

使用Python开发了CLI爬虫智能体
最近CLI智能体很火,这是一种在命令行工作的AI工具,比如Claude Code、OpenClaw等,非常适合编程、自动化、爬虫等场景。 我花了半天时间,用Python开发了一个CLI爬虫智能体,可以实现自动化采集Tiktok上公开的商品数据信息…...

LabVIEW变量实战指南:从局部、全局到共享变量的高效数据流设计
1. 温度监控系统设计中的变量选择困境 第一次用LabVIEW做温度监控系统时,我在变量选择上栽过大跟头。当时为了图省事,把所有传感器数据都塞进了全局变量,结果系统运行半小时后就开始卡顿,报警响应延迟高达5秒——这对工业场景简直…...
:从图灵机到 ECU)
从沙子到车辙(1.5):从图灵机到 ECU
1.5 从图灵机到 ECU 一座恶魔般的机房 1945 年,费城,宾夕法尼亚大学摩尔工程学院。 一座 30 吨重的巨兽蹲在一间约 167 平方米的机房里。它的名字叫 ENIAC(Electronic Numerical Integrator and Computer)——世界上第一台通用…...

别再手动写滤波器了!用Simulink DSP工具箱5分钟搞定一个可调带宽IIR滤波器
别再手动写滤波器了!用Simulink DSP工具箱5分钟搞定一个可调带宽IIR滤波器 信号处理工程师的日常工作中,滤波器设计是个绕不开的话题。无论是音频处理、通信系统还是生物医学信号分析,我们总需要根据不同的应用场景调整滤波器参数。传统方法中…...
)
NotebookLM赋能社科研究(从文献综述到理论建模的闭环实践)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM赋能社科研究(从文献综述到理论建模的闭环实践) NotebookLM 是 Google 推出的面向研究者的 AI 原生笔记工具,其核心能力在于对用户上传的 PDF、TXT 等本地…...