Air001 TIM1高级定时器单脉冲输出模式使用
Air001 TIM1高级定时器单脉冲输出模式使用
- ✨本例程基于合宙官方提供的标准库以及Demo工程作为验证参考。
- 📍官方提供的SDK包资源:
https://gitee.com/openLuat/luatos-soc-air001 - 🌿想了解STM32高级定时器单脉冲输出模式了解可以参考阅读:
https://shequ.stmicroelectronics.cn/thread-622823-1-1.html - 🚩TIM1高级定时器基本功能:

📓Air001单脉冲模式简介
单脉冲模式(OPM)是之前所述众多模式中的一个特例。这种模式允许计数器响应一个激励,并在一个程序可控的延时之后,产生一个脉宽可被程序控制的脉冲。
- 🌿可以通过从模式控制器启动计数器,在输出比较模式或者 PWM 模式下产生波形。设置 TIMx_CR1 寄存器的 OPM 位将选择单脉冲模式,这样可以让计数器自动的在产生下一个更新事件 UEV 时停止。
- 🔖用户手册给出的例子说明:
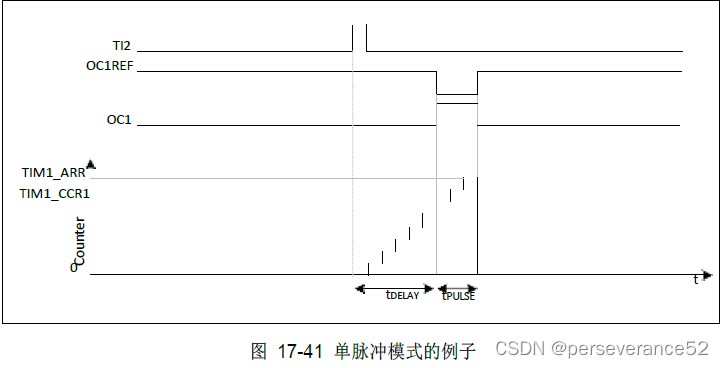
- 例如,当需要在从 TI2 输入脚上检测到一个上升沿开始,延迟 tDELAY 之后,在 OC1 上产生一个长度为tPULSE 的正脉冲。
使用 TI2FP2 作为触发 1:
◼ 置 TIMx_CCMR1 寄存器中的 CC2S=01,把 TI2FP2 映像到 TI2。
◼ 置 TIMx_CCER 寄存器中的 CC2P=0,使 TI2FP2 能够检测上升沿。
◼ 置 TIMx_SMCR 寄存器中的 TS=110,TI2FP2 作为从模式控制器的触发(TRGI)。
◼ 置 TIMx_SMCR 寄存器中的 SMS=110(触发模式),TI2FP2 被用来启动计数器。
OPM 的波形由写入比较寄存器的数值决定(要考虑时钟频率和计数器预分频器)
◼ tDELAY 由 TIMx_CCR1 寄存器中的值定义。
◼ tPULSE 由自动装载值和比较值之间的差值定义(TIMx_ARR -TIMx_CCR1)。
◼ 假定当发生比较匹配时要产生从 0 到 1 的波形,当计数器达到预装载值时要产生一个从 1 到 0 的波形;首先要置TIMx_CCMR1 寄存器的OC1M=111,进入 PWM 模式 2;根据需要有选择地使能预装载寄存器:置TIMx_CCMR1 中的OC1PE=1 和TIMx_CR1 寄存器中的ARPE;然后在TIMx_CCR1 寄存器中填写比较值,在 TIMx_ARR 寄存器中填写自动装载值,设置 UG 位来产生一个更新事件,然后等待在 TI2 上的一个外部触发事件。本例中,CC1P=0。
在这个例子中,TIMx_CR1 寄存器中的 DIR 和 CMS 位应该置低。
因为只需要一个脉冲,所以必须设置 TIMx_CR1 寄存器中的 OPM=1,在下一个更新事件(当计数器从自动装载值翻转到 0)时停止计数。
📗实例测试工程
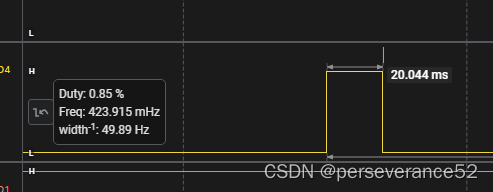
- ✨功能说明:使用TIM1定时器通道1作为信号输出,通道2作为输入信号,当检测到通道2,每接收到一个上升沿信号时,将延时80ms,输出一个20ms的高电平脉冲.(延时时间+高电平时间=计数器TIM1_ARR装载值以及TIM1_CCR1比较值)。
- ⚡需要注意的是,通道2的检测信号频率,不能超出输出通道1的频率,否则通道1输出的信号会被截断。根据本例程配置,通道2的信号间隔需要大于100ms。
- 🔰如需响应更高频率信号的接收和输出,可以将分频系数改小。(
TimHandle.Init.Prescaler)
- 🌿TIM1定时器通道1:
TIM1_CH1 ------> GPIO_AF13_TIM1----->PA3 - 🌿TIM1定时器通道2:
TIM1_CH2 ------> GPIO_AF1_TIM1----->PB3 - 🖍对应通道引脚配置初始化:
void TIM1_GPIO_Configuration(void)
{/**TIM GPIO ConfigurationTIM1_CH1 ------> GPIO_AF13_TIM1----->PA3TIM1_CH2 ------> GPIO_AF1_TIM1----->PB3*/GPIO_InitTypeDef GPIO_InitStruct;__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();GPIO_InitStruct.Pin = GPIO_PIN_3;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_PULLUP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;GPIO_InitStruct.Alternate = GPIO_AF13_TIM1;//TIM1通道1 PA3HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_3;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_PULLUP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;GPIO_InitStruct.Alternate = GPIO_AF1_TIM1;//TIM1通道2 PB3HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
- 🛠定时器配置:
TIM_HandleTypeDef TimHandle;TIM_OnePulse_InitTypeDef sConfig;TimHandle.Instance = TIM1; /* 选择TIM1 */TimHandle.Init.Period = 1000; /* 自动重装载值0 - 0xffff*/TimHandle.Init.Prescaler = 800 - 1; /* 分频系数16MHz/800 */TimHandle.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; /* 时钟不分频 */TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 向上计数 */TimHandle.Init.RepetitionCounter = 1-1; /* 不重复计数 */TimHandle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; /* 自动重装载寄存器没有缓冲 *//*TIM1单脉冲初始化*/if(HAL_TIM_OnePulse_Init(&TimHandle, TIM_OPMODE_SINGLE) != HAL_OK){Error_Handler();}sConfig.OCMode = TIM_OCMODE_PWM1; /* PWM模式1->TIM_OCPOLARITY_LOW PWM模式2->TIM_OCPOLARITY_HIGH */sConfig.OCPolarity = TIM_OCPOLARITY_LOW; /* OC输出低电平有效*/sConfig.Pulse = 200; /* 宽度 20ms*/sConfig.ICPolarity = TIM_ICPOLARITY_RISING; /* IC1捕获信号不反向 */sConfig.ICSelection = TIM_ICSELECTION_DIRECTTI; /* CC1 通道被配置为输入IC1映射在TI1上 */sConfig.ICFilter = 0; /* 不滤波 */sConfig.OCNPolarity = TIM_OCNPOLARITY_HIGH; /* OCN输出高电平有效 */sConfig.OCIdleState = TIM_OCIDLESTATE_RESET; /* 输出空闲状态1(OC1输出) */sConfig.OCNIdleState = TIM_OCNIDLESTATE_RESET; /* 输出空闲状态1(OC1N输出) *//*配置TIM1 单脉冲通道参数配置*/if(HAL_TIM_OnePulse_ConfigChannel(&TimHandle, &sConfig, TIM_CHANNEL_1, TIM_CHANNEL_2) != HAL_OK)//通道1作为输出,通道2作为输入{Error_Handler();}/*配置TIM1 单脉冲启动*/if(HAL_TIM_OnePulse_Start(&TimHandle, TIM_CHANNEL_1) != HAL_OK)//通道1作为输出,通道2作为输入{Error_Handler();}
- 🔖也可以这样配置:
TIM_HandleTypeDef TimHandle;TIM_OnePulse_InitTypeDef sConfig;TimHandle.Instance = TIM1; /* 选择TIM1 */TimHandle.Init.Period = 1000; /* 自动重装载值0 - 0xffff*/TimHandle.Init.Prescaler = 800 - 1; /* 分频系数16MHz/800 */TimHandle.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; /* 时钟不分频 */TimHandle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 向上计数 */TimHandle.Init.RepetitionCounter = 1-1; /* 不重复计数 */TimHandle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; /* 自动重装载寄存器没有缓冲 *//*TIM1单脉冲初始化*/if(HAL_TIM_OnePulse_Init(&TimHandle, TIM_OPMODE_SINGLE) != HAL_OK){Error_Handler();}sConfig.OCMode = TIM_OCMODE_PWM2; /* PWM模式1->TIM_OCPOLARITY_LOW PWM模式2->TIM_OCPOLARITY_HIGH */sConfig.OCPolarity = TIM_OCPOLARITY_HIGH; /* OC输出低电平有效*/sConfig.Pulse = 200; /* 宽度 20ms*/sConfig.ICPolarity = TIM_ICPOLARITY_RISING; /* IC1捕获信号不反向 */sConfig.ICSelection = TIM_ICSELECTION_DIRECTTI; /* CC1 通道被配置为输入IC1映射在TI1上 */sConfig.ICFilter = 0; /* 不滤波 */sConfig.OCNPolarity = TIM_OCNPOLARITY_HIGH; /* OCN输出高电平有效 */sConfig.OCIdleState = TIM_OCIDLESTATE_RESET; /* 输出空闲状态1(OC1输出) */sConfig.OCNIdleState = TIM_OCNIDLESTATE_RESET; /* 输出空闲状态1(OC1N输出) *//*配置TIM1 单脉冲通道参数配置*/if(HAL_TIM_OnePulse_ConfigChannel(&TimHandle, &sConfig, TIM_CHANNEL_1, TIM_CHANNEL_2) != HAL_OK)//通道1作为输出,通道2作为输入{Error_Handler();}/*配置TIM1 单脉冲启动*/if(HAL_TIM_OnePulse_Start(&TimHandle, TIM_CHANNEL_1) != HAL_OK)//通道1作为输出,通道2作为输入{Error_Handler();}
📚测试工程:
链接:https://pan.baidu.com/s/1ebfm3hSOuJ5StIe-sh8Rwg
提取码:beda
相关文章:
Air001 TIM1高级定时器单脉冲输出模式使用
Air001 TIM1高级定时器单脉冲输出模式使用 ✨本例程基于合宙官方提供的标准库以及Demo工程作为验证参考。📍官方提供的SDK包资源:https://gitee.com/openLuat/luatos-soc-air001🌿想了解STM32高级定时器单脉冲输出模式了解可以参考阅读:https…...
矿机生意难做,比特大陆停发工资
文/章鱼哥 出品/陀螺财经 沉寂了许久的比特大陆,因为一则延迟发薪的公告引起了圈内热议,熊市下,曾经风头无两的比特大陆,现金流也会扛不住吗? 据吴说区块链报道,多名比特大陆内部员工确认,比特大…...

计算机竞赛python区块链实现 - proof of work工作量证明共识算法
文章目录 0 前言1 区块链基础1.1 比特币内部结构1.2 实现的区块链数据结构1.3 注意点1.4 区块链的核心-工作量证明算法1.4.1 拜占庭将军问题1.4.2 解决办法1.4.3 代码实现 2 快速实现一个区块链2.1 什么是区块链2.2 一个完整的快包含什么2.3 什么是挖矿2.4 工作量证明算法&…...
pyqt 划线标注工具,可用于车道线标注
目录 效果图: pyqt代码: opencv划线: 效果图: pyqt代码: import osfrom PyQt5.QtWidgets import QWidget, QApplication, QVBoxLayout, QPushButton, QLabel from PyQt5.QtGui import QPainter, QPen, QColor, QImage, QPixmap from PyQt5.QtCore import Qt, QPoint i…...

蓝桥等考Python组别十七级004
第一部分:选择题 1、Python L17 (15分) 运行下面程序,输出的结果是( )。 def func(x, y): return (x - y) // 2 print(func(10, 4)) 2356正确答案:B 2、Python L17 (15...

计算机毕业设计选什么题目好?springboot 职业技术学院图书管理系统
✍✍计算机编程指导师 ⭐⭐个人介绍:自己非常喜欢研究技术问题!专业做Java、Python、微信小程序、安卓、大数据、爬虫、Golang、大屏等实战项目。 ⛽⛽实战项目:有源码或者技术上的问题欢迎在评论区一起讨论交流! ⚡⚡ Java实战 |…...

外汇天眼:6个常见网络投资诈骗迹象,如发现任何一个,务必小心!
在这个数字时代,随着外汇和加密货币市场的不断发展,网络投资已经成为一种广受欢迎的理财方式。然而,近年来,诈骗犯罪也在不断增加,给社会带来了巨大的财务损失。尽管投资诈骗的手法各式各样,但它们都可以追…...

MyBatis的xml里#{}的参数为null报错、将null作为参数传递报错问题
今天在调试的过程中发现一个bug,把传入的参数写到查询分析器中执行没有问题,但是在程序中执行就报错:org.springframework.jdbc.UncategorizedSQLException : Error setting null parameter. Most JDBC drivers require that the JdbcType m…...

【网络安全】「漏洞原理」(一)SQL 注入漏洞之概念介绍
前言 严正声明:本博文所讨论的技术仅用于研究学习,旨在增强读者的信息安全意识,提高信息安全防护技能,严禁用于非法活动。任何个人、团体、组织不得用于非法目的,违法犯罪必将受到法律的严厉制裁。 【点击此处即可获…...
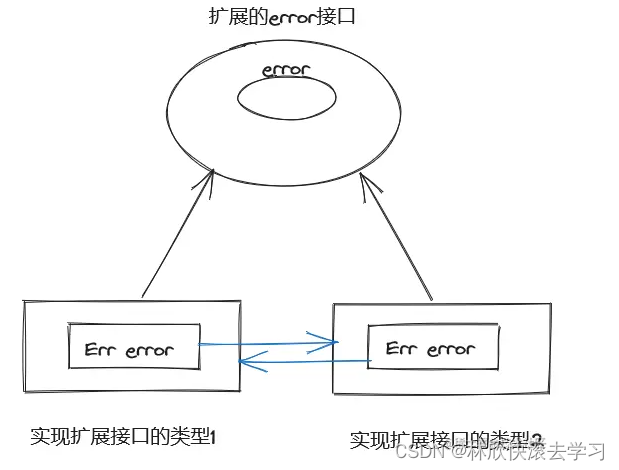
Go语言错误处理最佳实践
错误处理实践 我们在go语言中设计error的处理体系时候, 一般都会去做下面两点 直接使用errors.New()生成error接口的值 扩展error接口, 并定义扩展error接口的实现类型 error接口是什么? go语言的error是一个接口类型, 其源码如下: type error interface {Error() string…...
python结合excel数据轻松实现接口自动化测试
在刚刚进入测试行业的时候,最开始也是做功能测试,我想很多伙伴和我一样,觉得自动化测试都很高端,很神秘。迫不及待的想去学习作自动化测试。 以前比较常用数据库python做自动化,后面发现excel个人觉得更加适合&#x…...
构建精致 Chrome 插件:开箱即用的 TypeScript 模板 | 开源日报 No.51
tonsky/FiraCode Stars: 72.7k License: OFL-1.1 Fira Code 是一种免费的等宽字体,具有编程连字符。 Fira Code 提供了丰富多样的箭头和标点符号调整功能。Fira Code 支持各种不同的字符变体、风格集和其他字体特性,以满足用户个性化需求。Fira Code …...
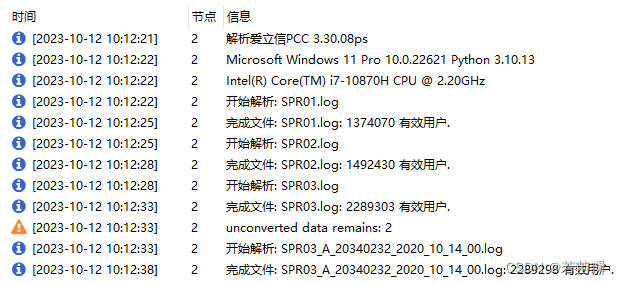
在Windows下自己从源码编译Python3.10.13成安装包
文章目录 (一)Python 3.10 的生命周期(一)下载源码(二)准备环境(三)编译(3.1)解压源码到目录(3.2)下载依赖(PCBuild&#…...

WIN10如何搭建自己的博客
引言: 路线说明: 在CSDN,博客园,简书等平台,可以直接在上面发表,用户交互做的好,写的文章百度也能搜索的到,这样速度也是最快的,不费心运营啥的。缺点是比较不自由&…...

uniapp 首页制作
uniapp拨打固定的电话 function Hotline() {// 拨打电话uni.makePhoneCall({phoneNumber: 19969547693})}页面跳转 //普通跳转function homepage() {uni.navigateTo({url: /pages/homepage/homepage});}//二、uni.redirectTo关闭当前页面,跳转到应用内的某个页面。…...

意大利航天飞行器公司【Sidereus】完成510万欧元融资
来源:猛兽财经 作者:猛兽财经 猛兽财经获悉,位于意大利萨莱诺的航天飞行器公司Sidereus Space Dynamics今日宣布已完成510万欧元融资。 本轮融资由Primo Space和CDP Venture Capital Sgr领投,通过Italia Venture II - Fondo Impr…...
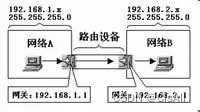
10-网络篇-DHCP获取的参数详解
一个设备接入路由器局域网时,是通过DHCP获取网络信息,从而完成网络配置的获取。如下图所示为windows系统通过DHCP所要获取的网络配置:IP、子网掩码、网关、DNS服务器。任何设备要上网前,都需要知道这几个参数,下面对这…...

MVCC底层原理
MVCC多版本并发控制机制 多版本多个undo日志 什么时候会获取到事务id 事务id的生成并不是通过begin/start/transaction命令得到的,是在执行第一个修改操作或者加入排他锁操作,才会向mysql申请真正的事务id,mysql内部是严格按照事务的启动顺…...

云原生Docker容器管理
目录 docker容器的管理 容器创建 查看容器的运行状态 启动容器 创建并启动容器 终止容器运行 删除容器 容器的进入 查看容器详细信息 复制到容器中 从容器复制文件到主机 容器的导出与导入 导出 导入 相当于一个进程,性能接近于原生,几乎没有损…...
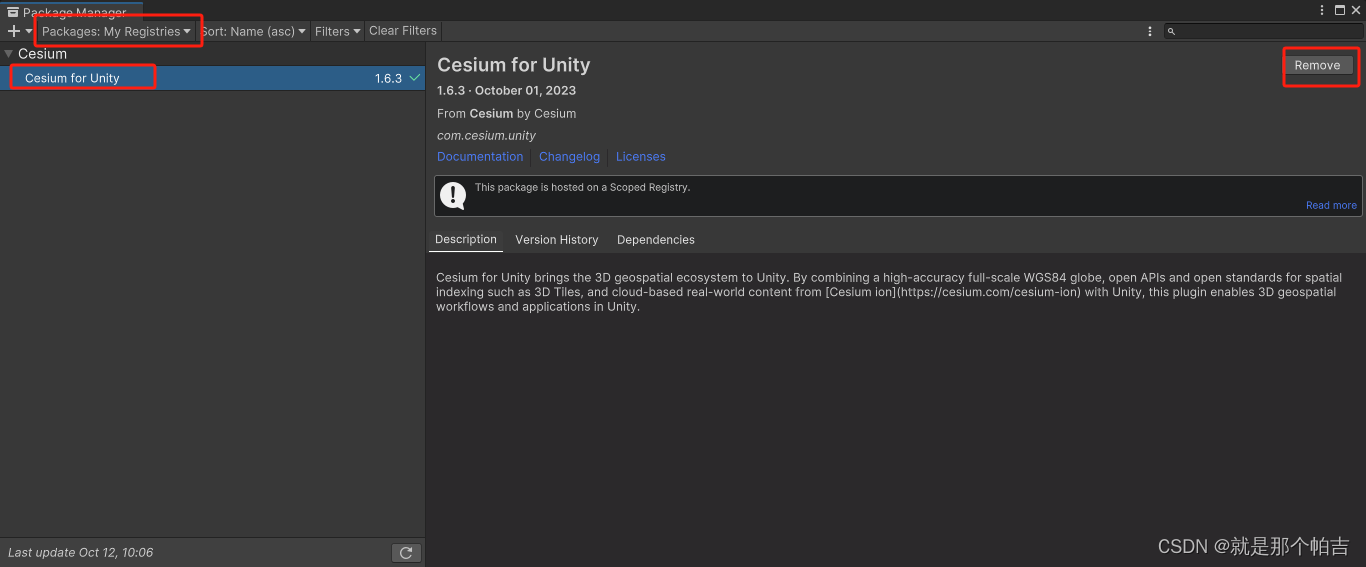
1.Cesium For Unity插件安装
1.Unity安装 先安装Unity Hub,然后在里面安装Unity。 2.新建工程 新建项目 选择项目类型 3. 导入Cesium包 打开新建的项目,在菜单栏选择Edit->Project Settings->Package Manager.并添加Cesium的包信息。 Name: Cesium URL: https://unity.pkg.cesium.com Sco…...

Qwen3-ForcedAligner-0.6B在美赛中的应用:跨语言访谈数据分析
Qwen3-ForcedAligner-0.6B在美赛中的应用:跨语言访谈数据分析 1. 引言 在美国大学生数学建模竞赛(MCM/ICM)中,参赛队伍经常面临一个棘手问题:如何高效处理来自不同国家、不同语言的学术访谈数据?传统方法…...

AI SaaS创业:从0到1打造爆款产品的核心方法论
市场定位与需求验证通过数据分析和用户访谈验证目标市场的真实需求。使用工具如Google Trends、SEMrush分析搜索热度,结合用户调研(SurveyMonkey、Typeform)明确痛点。避免主观假设,确保产品解决高频、高价值问题。最小可行产品&a…...

基于BANG语言的Sigmoid算子开发与PyTorch集成实战指南
1. BANG语言与Sigmoid算子开发基础 第一次接触寒武纪BANG语言时,我被它类似CUDA但更简洁的语法设计惊艳到了。这种专为MLU硬件设计的异构编程语言,通过在C/C基础上扩展并行计算特性,让开发者能更高效地利用寒武纪芯片的算力资源。 BANG核心语…...

golang.org/x/net WebSocket开发完全手册:实现实时双向通信
golang.org/x/net WebSocket开发完全手册:实现实时双向通信 【免费下载链接】net [mirror] Go supplementary network libraries 项目地址: https://gitcode.com/gh_mirrors/ne/net 在现代Web应用开发中,实时双向通信已成为提升用户体验的关键技术…...
逆势走强、半导体承压:地缘扰动与产业逻辑共振下的ETF分化走势)
标普油气ETF富国(513350.SH)逆势走强、半导体承压:地缘扰动与产业逻辑共振下的ETF分化走势
4月2日,市场全天震荡调整,创业板指、科创50指数均跌超2%。板块方面,医药板块逆势走强,油气股表现活跃,光纤概念反复走强;算力租赁概念集体调整。ETF方面,标普油气ETF富国(513350.SH&…...

如何通过智慧树自动化学习助手解决网课学习效率问题
如何通过智慧树自动化学习助手解决网课学习效率问题 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 副标题:面向时间紧张学习者的智能网课辅助工具 一、价…...

百考通:AI精准赋能任务书生成,让科研与项目启动更高效
在学术研究、课程设计与项目开发的起步阶段,一份规范、清晰的任务书是指引方向的核心纲领。但从选题构思到内容撰写,往往让研究者与学生陷入困境:选题迷茫、逻辑混乱、要求表述模糊,严重拖慢项目推进节奏。百考通(http…...

Memfit AI 渗透测试智能体,到底能不能打?
深度测评:Memfit AI 渗透测试智能体,到底能不能打? 写在前面:这篇文章我写了整整一周,从安装部署到实际测试,把 Memfit AI 这个号称"下一代 AI 渗透测试平台"的工具从头到尾摸了一遍。先说结论&a…...
)
2026 年真正必备的 10 个 Claude 插件(以及它们的作用)
如何把 Claude 从聊天机器人,变成能写代码、联网、访问数据、自动化全流程的超级 AIClaude 刚刚获得了超能力。 而大多数人还以为它只是个聊天机器人。 2026 年 2 月 24 日,Anthropic 为企业用户推出了私有插件市场。而在此两周前,社区已经发…...

Shox96 Progmem:嵌入式Flash短字符串高效压缩方案
1. Shox96 Progmem 压缩库技术解析:面向嵌入式 Flash 的短字符串高效压缩方案1.1 工程背景与设计动因在资源受限的嵌入式系统中,Flash 存储空间始终是关键瓶颈。以典型 Cortex-M0/M3 MCU(如 STM32F072、nRF52832)为例,…...