<图像处理> Fast角点检测
Fast角点检测
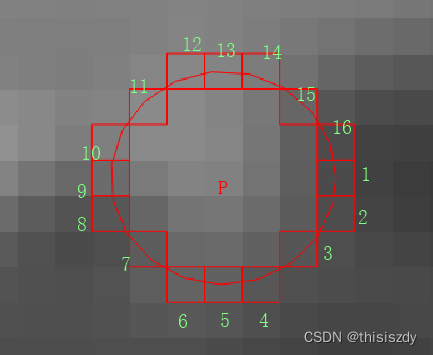
基本原理是使用圆周长为N个像素的圆来判定其圆心像素P是否为角点,如下图所示为圆周长为16个像素的圆(半径为3);OpenCV还提供圆周长为12和8个像素的圆来检测角点。
相对中心像素的位置信息
//圆周长为16
static const int offsets16[][2] =
{{0, 3}, { 1, 3}, { 2, 2}, { 3, 1}, { 3, 0}, { 3, -1}, { 2, -2}, { 1, -3},{0, -3}, {-1, -3}, {-2, -2}, {-3, -1}, {-3, 0}, {-3, 1}, {-2, 2}, {-1, 3}
};//圆周长为12
static const int offsets12[][2] =
{{0, 2}, { 1, 2}, { 2, 1}, { 2, 0}, { 2, -1}, { 1, -2},{0, -2}, {-1, -2}, {-2, -1}, {-2, 0}, {-2, 1}, {-1, 2}
};//圆周长为8
static const int offsets8[][2] =
{{0, 1}, { 1, 1}, { 1, 0}, { 1, -1},{0, -1}, {-1, -1}, {-1, 0}, {-1, 1}
};
角点判定条件
在圆周上顺时针从顺时针方向从1到N的顺序对圆周像素点进行连续编号。如果在圆周上有M个连续的像素的亮度都比圆心像素的亮度还要亮,或者比圆心像素的亮度还要暗,并且亮度差都大于设置的阈值t,则圆心像素被确定为角点。因此,成为角点必须满足下列两个条件之一。
- 条件1:集合S由圆周上M个连续的像素x组成,该集合的任意像素x都满足 I x > I p + t I_x>I_p+t Ix>Ip+t
- 条件2:集合S由圆周上M个连续的像素x组成,该集合的任意像素x都满足 I x < I p − t I_x<I_p-t Ix<Ip−t
在OpenCV中有三种模式,如下:
- TYPE_9_16,表示圆周上16个像素点/连续9个像素点满足条件
- TYPE_7_12,表示圆周上12个像素点/连续7个像素点满足条件
- TYPE_5_8,表示圆周上8个像素点/连续5个像素点满足条件
非角点检测
在一副图像中,非角点往往是占多数。而非角点检测比角点检测容易很多,因此首先剔除非角点将大大提高角点检测速度。例如,当圆周长N为16个像素,连续像素M为12,所以编号为1,5,9,13的这4个圆周像素点中应该至少有3个满足条件。在OpenCV中,采用了另一种方法来判断非角点,即同时检测任意直径上两个端点像素的像素值。
非极大值抑制
如果N一定,我们把使P仍然是角点的最大阈值 t t t定义为P的角点响应值,通过迭代,每次迭代比较8个连续的圆周像素与圆心像素之间的绝对差值,得到8个绝对差值中的最小值 d d d,与这8个连续像素两端相邻的两个圆周像素与圆心像素的绝对差值分别为 d 0 d_0 d0和 d 9 d_9 d9,则此次迭代所得到的角点响应值 v i v_i vi为
v i = m a x ( t , m i n ( d , d 0 ) , m i n ( d , d 9 ) ) v_i=max(t,min(d,d_0),min(d,d_9)) vi=max(t,min(d,d0),min(d,d9))
16个圆周像素需要迭代16次,则最终的角点响应值V为:
V = m a x ( v i ) V=max(v_i) V=max(vi)
角点响应 V V V得到后,需要在 3 ∗ 3 3*3 3∗3的邻域内比较 V V V,只保留那些比其8邻域都大的像素作为最终的角点。非角点的响应值定义为0。
Fast角点检测步骤
- 对被检测像素的16个圆周像素的部分像素点进行非角点检测;
- 如果初步判断为角点,则对圆周上的全部像素进行角点检测;
- 对角点进行非极大值抑制,最终得到角点;
OpenCV函数
void cv::FAST(InputArray image, std::vector<KeyPoint>& keypoints, int threshold, bool nonmaxSuppression = true) void cv::FAST(InputArray image, std::vector<KeyPoint>& keypoints, int threshold, bool nonmaxSuppression, FastFeatureDetector::DetectorType type) Parameters
image 输入图像,灰度图像;
keypoints 检测的关键角点;
threshold 中心像素与围绕该像素的圆形像素之间强度差的阈值;
nonmaxSuppression 如果为true, 则对检测到的角点(关键点)进行非极大值抑制;
type 三种选择:FastFeatureDetector::TYPE_9_16, FastFeatureDetector::TYPE_7_12, FastFeatureDetector::TYPE_5_8
相关文章:
<图像处理> Fast角点检测
Fast角点检测 基本原理是使用圆周长为N个像素的圆来判定其圆心像素P是否为角点,如下图所示为圆周长为16个像素的圆(半径为3);OpenCV还提供圆周长为12和8个像素的圆来检测角点。 相对中心像素的位置信息 //圆周长为16 static c…...

基于centos、alpine制作Java JDK基础镜像
文章目录 前言一、 简介二、制作JDK/Java基础镜像1.准备事项2.制作Dockerfile脚本2.1.基于centos作为基础镜像2.2.基于alpine作为基础镜像3.构建镜像4.测试验证前言 在日常开发中,但凡项目需要docker容器化部署,制作项目镜像前都需要在Dockerfile中配置Java基础镜像。为什么…...
【AI视野·今日Robot 机器人论文速览 第五十二期】Wed, 11 Oct 2023
AI视野今日CS.Robotics 机器人学论文速览 Wed, 11 Oct 2023 Totally 31 papers 👉上期速览✈更多精彩请移步主页 Daily Robotics Papers RoboHive: A Unified Framework for Robot Learning Authors Vikash Kumar, Rutav Shah, Gaoyue Zhou, Vincent Moens, Vittor…...
hive 知识总结
编辑 社区公告教程下载分享问答JD 登 录 注册 01 hive 介绍与安装 1 hive介绍与原理分析 Hive是一个基于Hadoop的开源数据仓库工具,用于存储和处理海量结构化数据。它是Facebook 2008年8月开源的一个数据仓库框架,提供了类似于SQL语法的HQL…...

golang/云原生/Docker/DevOps/K8S/持续 集成/分布式/etcd 教程
3-6个月帮助学员掌握golang后端开发岗位必备技术点 教程时长: 150小时 五大核心专栏,原理源码案例分析项目实战直击工作岗位 golang:解决go语言编程问题 工程组件:解决golang工程化问题 分布式中间件:解决技术栈单一及分布式开发问题 云原生…...
jeecg库login登录过程分析笔记
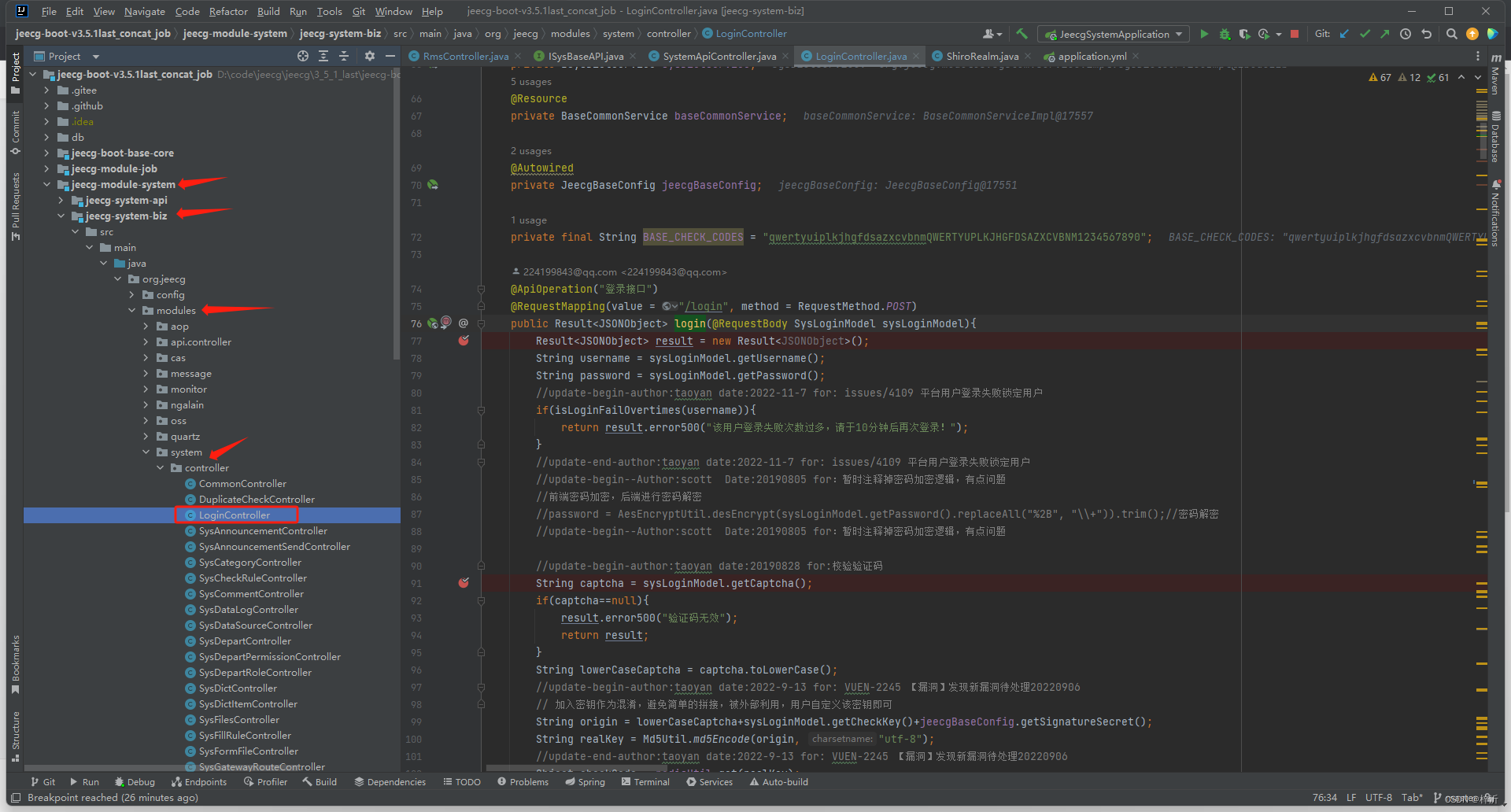
jeecg库(版本jeecg-boot-v3.5.1last)实现了用户登录功能,二开时为了借鉴jeecg用户登录的方法,跑了一遍登录方法: org.jeecg.modules.system.controller.LoginController#login 定义这个方法的类的路径是:…...

echarts仪表盘vue
<div class"ybptx" ref"btryzb"></div>mounted() {this.getBtData();},getBtData() {var chart this.$echarts.init(this.$refs.btryzb);var data_czzf 88;var option {series: [{name: 内层数据刻度,type: gauge,radius: 80%,min: 0,max: 1…...

管道和重定向分号-连接符
本文介绍shell脚本常用命令连接符:管道符( | )、重定向( < 、>、>>、2> 、&> )、分号( ; ) 本文内容同微信公众号【凡登】,关注不迷路,学习上高速,欢迎关注共同学习。 1、管道 进程的通信方式之一…...
)
WSL VScode连接文件后无法修改(修改报错)
权限问题 usrname:用户名 dirpath:要修改的文件夹路径 sudo chown -R usrname /dirpath...
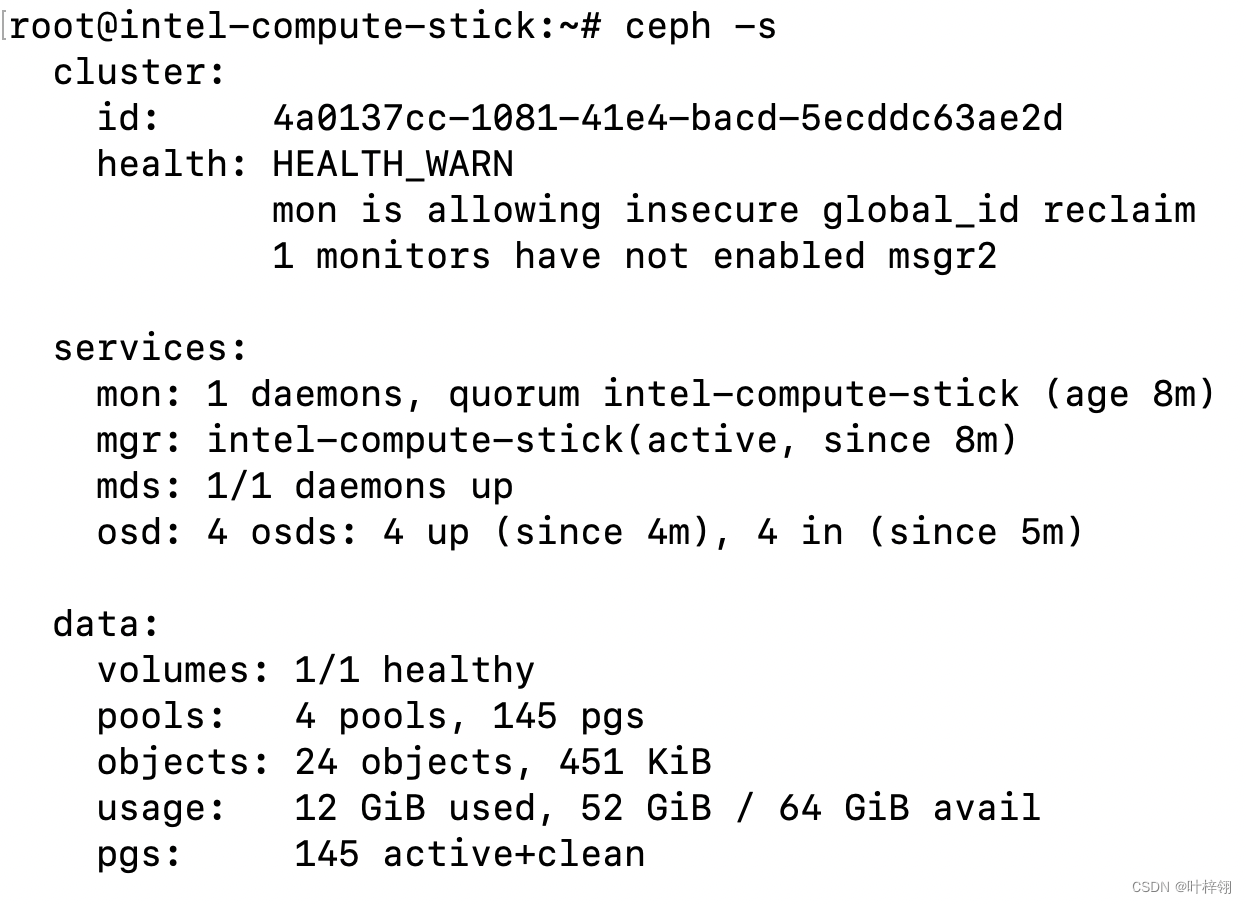
迷你Ceph集群搭建(超低配设备)
我的博客原文链接:https://blog.gcc.ac.cn/post/2023/%E8%BF%B7%E4%BD%A0ceph%E9%9B%86%E7%BE%A4%E6%90%AD%E5%BB%BA/ 环境 机器列表: IP角色说明10.0.0.15osdARMv7,512M内存,32G存储,百兆网口10.0.0.16clientARM64…...
Python数据挖掘项目实战——自动售货机销售数据分析
摘要:本案例将主要结合自动售货机的实际情况,对销售的历史数据进行处理,利用pyecharts库、Matplotlib库进行可视化分析,并对未来4周商品的销售额进行预测,从而为企业制定相应的自动售货机市场需求分析及销售建议提供参…...

TortoiseGit使用教程
文章目录 一. 创建仓库二. Clone仓库三. 查看修改记录四. 版本回溯五. 创建分支六. 切换分支七. 合并分支八. 删除分支九. TortoiseGit配置1. 常规配置2. 配置远程仓库账户密码3. 配置远程仓库 一. 创建仓库 在需要创建仓库的文件上右键→Git Create repository here… 创建仓…...

如何测量GNSS信号和高斯噪声功率及载波比?
引言 本文将介绍如何测量德思特Safran GSG-7或GSG-8 GNSS模拟器的输出信号功率。此外,还展示了如何为此类测量正确配置德思特Safran Skydel仿真引擎以及如何设置射频设备,从而使用频谱分析仪准确测量信号的射频功率。 什么是载波噪声密度C/N0 GNSS接收…...
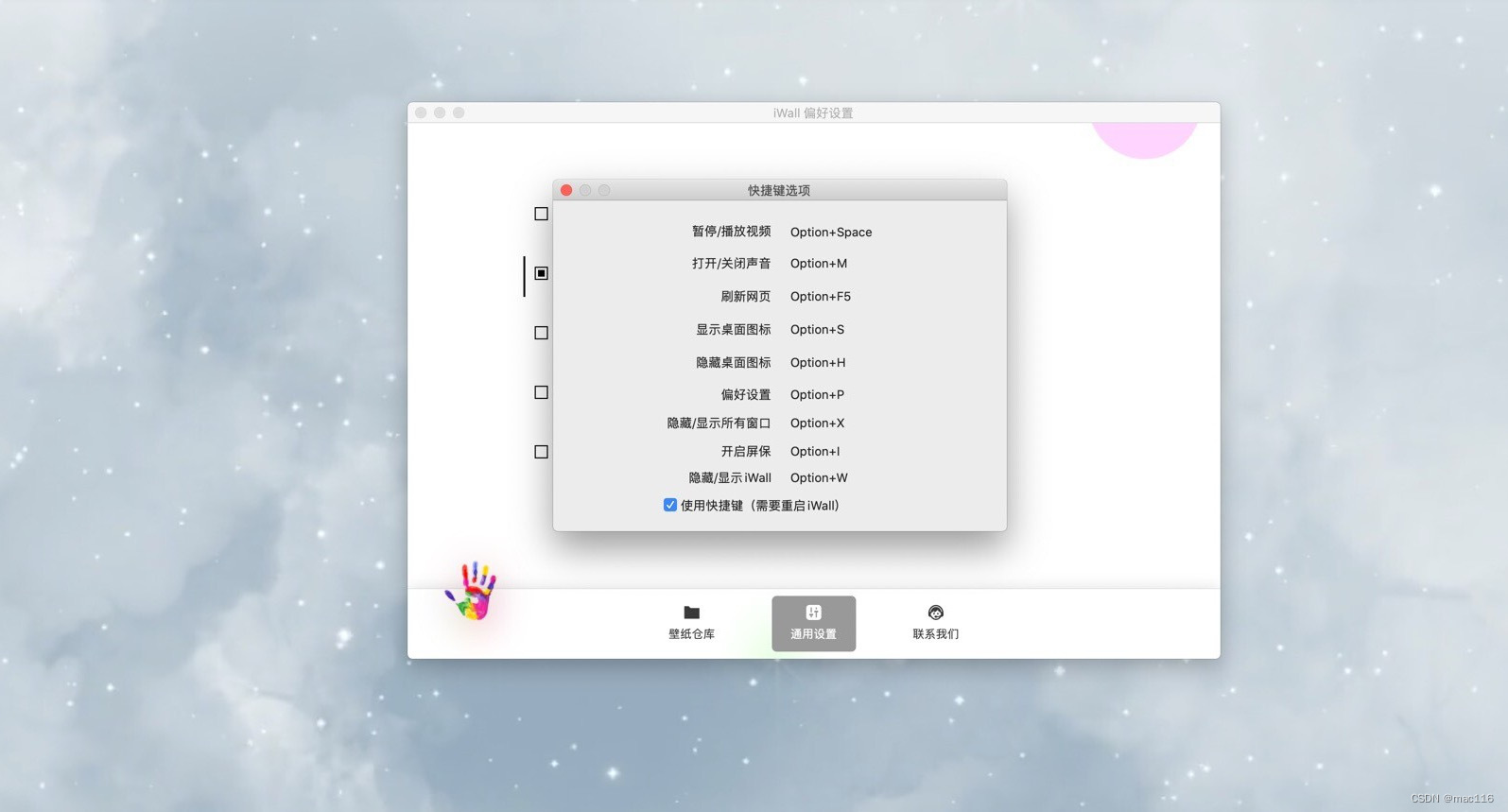
动态壁纸软件iWall mac中文特色
iWall for mac是一款动态壁纸软件,它可以使用任何格式的漂亮视频(无须转换),音频(可视化功能),图片,动画,Flash,gif,swf,程序,网页,网站做为您的动态壁纸&…...
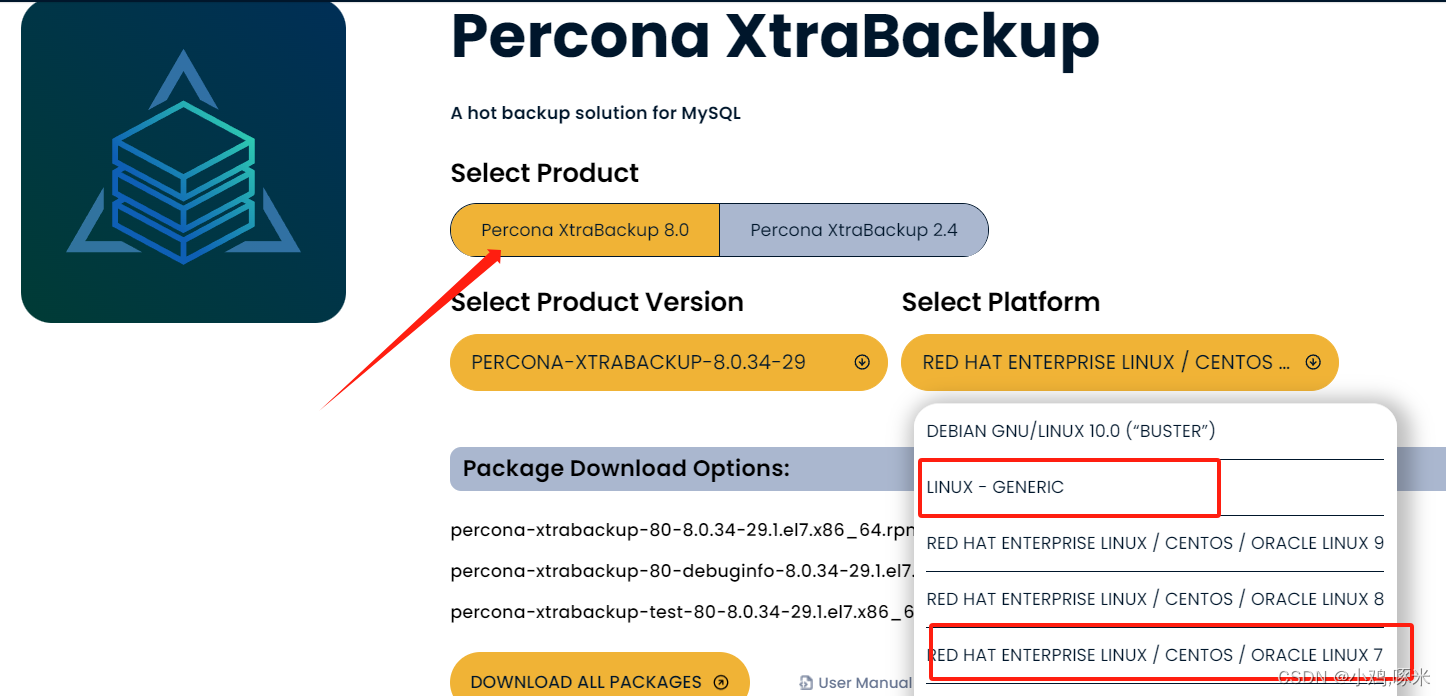
xtrabackup全备 增备
版本针对mysql8.0版本 官方下载地址 https://www.percona.com/downloads 自行选择下载方式 yum安装方式 1、下载上传服务器 安装软件 [rootmaster mysql]# ll percona-xtrabackup-80-8.0.33-28.1.el7.x86_64.rpm -rw-r--r--. 1 root root 44541856 Oct 10 13:25 percona-x…...

【广州华锐互动】灭火器使用VR教学系统应用于高校消防演练有什么好处?
在科技发展的大潮中,虚拟现实(VR)技术以其独特的沉浸式体验赢得了各个领域的青睐,其中包括教育和培训。在高校消防演练中,VR也成为了一种新的消防教育方式。 由广州华锐互动开发的VR消防演练系统,就包含了校…...
Pymol做B因子图
分子动力学模拟结束后,获得蛋白的平均结构, 比如获得的平均结构为WT-average.pdb 然后将平均结构导入到Pymol 中,可以得到B因子图。 gmx rmsf -f md_0_100_noPBC.xtc -s md_0_100.tpr -o rmsf-per-residue.xvg -ox average.pdb -oq bfactors…...

EKF例程 matlab
% 不含IMU误差方程的EKF滤波典型程序,适用于多次滤波的第二级 % author:Evand % date: 2023-09-20 % Ver1 clear;clc;close all; global T %% initial T 0.1; %采样率 t [T:T:100]; Q 0.1diag([1,1,1]);wsqrt(Q)randn(size(Q,1),length(t)); R 1diag([1,1,1]);v…...
【C语言】atoi函数的模拟
atoi对于初学者来说大概率是一个陌生的函数 但不要害怕,我们可以通过各种网站去查询 例如: cplusplus就是一个很好的查询网站 目录 函数介绍模拟实现需要注意的点 函数介绍 我们发现这是一个将字符串转换为整形数字的函数 例如: int main()…...
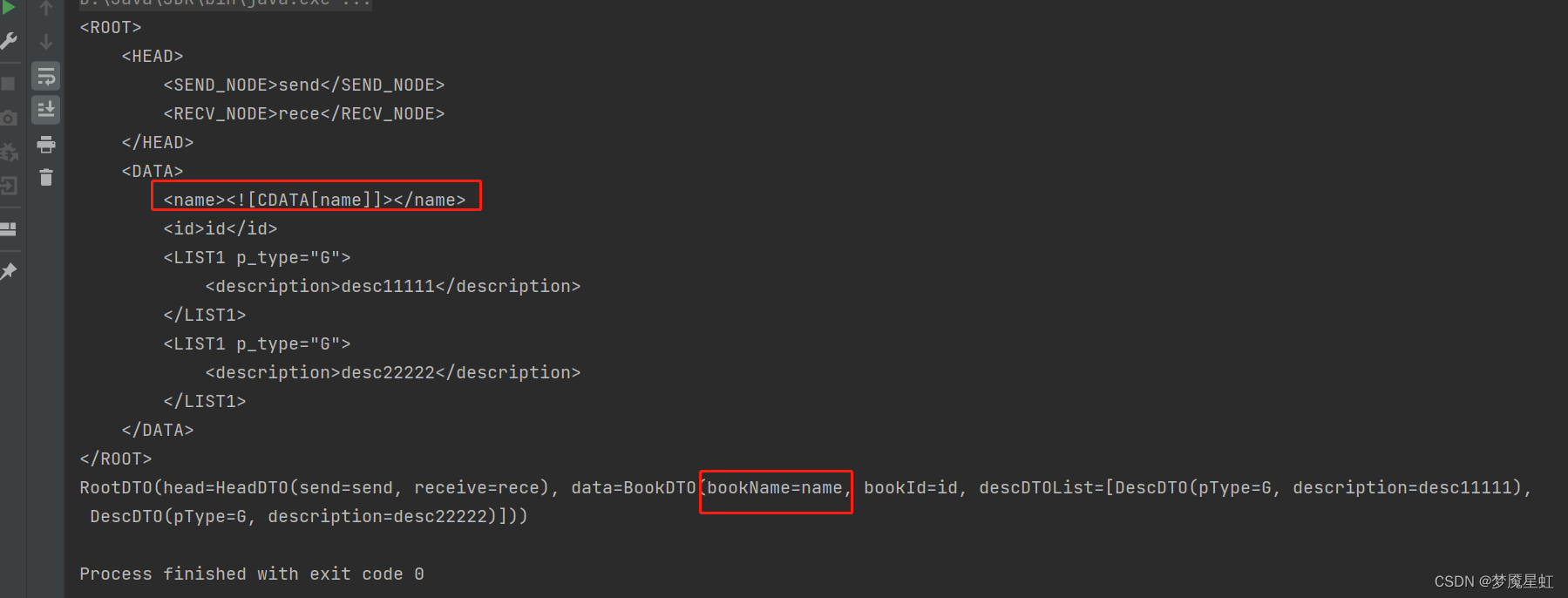
JAXB 使用记录 bean转xml xml转bean 数组 继承 CDATA(转义问题)
JAXB 使用记录 部分内容引自 https://blog.csdn.net/gengzhy/article/details/127564536 基础介绍 JAXBContext类:是应用的入口,用于管理XML/Java绑定信息 Marshaller接口:将Java对象序列化为XML数据 Unmarshaller接口:将XML数…...

MHMarkets迈汇:油价回落地缘风险有所缓和
MHMarkets迈汇:油价回落地缘风险有所缓和近期国际原油市场出现明显回吐,布伦特与WTI两大基准油价从前期高位双双滑落,地缘风险溢价随谈判预期升温而部分释放。市场围绕中东局势变化展开高频博弈,多空情绪快速切换。在这一背景下&a…...
)
Perplexity新闻搜索失效真相:LLM缓存机制、地域策略与时间戳偏移的三重干扰(内部技术备忘录节选)
更多请点击: https://codechina.net 第一章:Perplexity新闻资讯搜索 Perplexity 是一款以实时性、引用可追溯性和多源聚合为特色的 AI 搜索工具,其“新闻资讯搜索”功能专为技术从业者与研究人员设计,支持按时间范围、可信信源&a…...
:含12类高频Query模板+错误码速查表)
华尔街量化团队内部文档流出(Perplexity财经数据查询SOP v2.3):含12类高频Query模板+错误码速查表
更多请点击: https://codechina.net 第一章:Perplexity财经数据查询概述 Perplexity 是一款基于大语言模型的智能搜索与知识发现工具,其在财经领域展现出独特优势:它能实时整合权威信源(如 SEC、Bloomberg、Reuters、…...
)
零基础想学挖漏洞?普通人也能看懂的网络安全入门学习路线(建议收藏)
很多人对网络安全的第一印象:黑客、代码、入侵、黑框代码疯狂滚动、随手就能让ATM吐钱,随手一个漏洞几千上万,日进斗金!!! 但真实情况是:90%零基础新人不会挖漏洞,不是天赋不够&…...

从‘梳子’到‘低通’:图解CIC滤波器在5G和软件无线电里的那些事儿
从‘梳子’到‘低通’:图解CIC滤波器在5G和软件无线电里的那些事儿 在5G毫米波基站和软件无线电设备中,高速ADC采样产生的数据洪流就像未经处理的原油,而CIC滤波器正是第一道精炼装置。这种没有乘法器的奇特滤波器,凭借积分器和梳…...

FPGA硬解 vs 软件模拟:实测MiSTer在延迟和画质上到底强在哪?
FPGA硬解 vs 软件模拟:实测MiSTer在延迟和画质上到底强在哪? 在复古游戏的世界里,每一帧的延迟都可能决定《拳皇97》中一个连招的成败,每一像素的偏差都会影响《魂斗罗》子弹轨迹的判断。当硬核玩家们争论FPGA方案与软件模拟孰优孰…...

如何快速重置JetBrains IDE试用期:终极使用指南
如何快速重置JetBrains IDE试用期:终极使用指南 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 你是否遇到过IntelliJ IDEA、PyCharm或WebStorm等JetBrains IDE试用期突然到期,导致开发工作…...

Linux用户的终极翻译助手:3种智能翻译方式完全指南
Linux用户的终极翻译助手:3种智能翻译方式完全指南 【免费下载链接】CuteTranslation Linux屏幕取词翻译软件 项目地址: https://gitcode.com/gh_mirrors/cu/CuteTranslation 你是否曾在Linux系统中阅读英文文档时频繁切换浏览器查词?是否因为图片…...
从屏幕取词到智能翻译:CuteTranslation如何重塑Linux用户的跨语言工作流
从屏幕取词到智能翻译:CuteTranslation如何重塑Linux用户的跨语言工作流 【免费下载链接】CuteTranslation Linux屏幕取词翻译软件 项目地址: https://gitcode.com/gh_mirrors/cu/CuteTranslation 在Linux生态系统中,多语言处理一直是个技术痛点—…...

Android Studio中文插件5分钟快速安装完整指南:告别英文开发困扰
Android Studio中文插件5分钟快速安装完整指南:告别英文开发困扰 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack 还在…...