Jetson Orin NX 开发指南(7): EGO-Swarm 的编译与运行
一、前言
EGO-Planner 浙江大学 FAST-LAB 实验室的开源轨迹规划算法是,受到 IEEE Spectrum 等知名科技媒体的报道,其理论技术较为前沿,是一种不依赖于ESDF,基于B样条的规划算法,并且规划成功率、算法消耗时间、代价数值等性能方面都要高于其他几种知名算法。
而 EGO-Swarm 是基于 EGO-Planner 拓展的去中心化的无人机集群算法,有助于智能小车或自主无人机集群的规划的学习与开发
由于 EGO-Planner 是 EGO-Swarm 的一部分,并且他们的安装其实差别不大,因此本文主要介绍 EGO-Swarm 的编译与运行,参考
https://github.com/ZJU-FAST-Lab/ego-planner-swarm
https://github.com/ZJU-FAST-Lab/ego-planner
GitHub - ZJU-FAST-Lab/Fast-Drone-250: hardware and software design of the 250mm autonomous drone
由于 Jetson 系列开发板常用于当作机载电脑,因此本文介绍如何在 Jetson Orin NX 开发板上编译和运行 EGO-Swarm,当然本文对 EGO-Planner 同样适用。
二、编译 EGO-Swarm
首先安装依赖
sudo apt-get install libarmadillo-dev然后创建并进入工作空间
mkdir -p ~/catkin_ws/src/
cd ~/catkin_ws/src/从 GitHub 上下载 EGO-Swarm 源码
git clone https://github.com/ZJU-FAST-Lab/ego-planner-swarm.git进入 EGO-Swarm 工作空间并编译
cd ~/catkin_ws/src/ego-planner-swarm
catkin_make编译完成显示如下结果
三、运行 EGO-Swarm
接下来我们运行 EGO-Swarm,主要分为仿真和实验两个部分
3.1 EGO-Swarm 仿真
首先通过快捷键 ctrl + alt + A 打开超级终端,如果没有安装则参考下文安装
Jetson Orin NX 开发指南(2): 基本环境配置_想要个小姑娘的博客-CSDN博客
将超级终端划分为两个终端,全选后 source 一下工作空间,终端输入
source ~/catkin_ws/src/ego-planner-swarm/devel/setup.bash
在第一个终端输入
roslaunch ego_planner rviz.launch在第二个终端输入
roslaunch ego_planner swarm.launch如下所示

依次执行可以得到如下结果

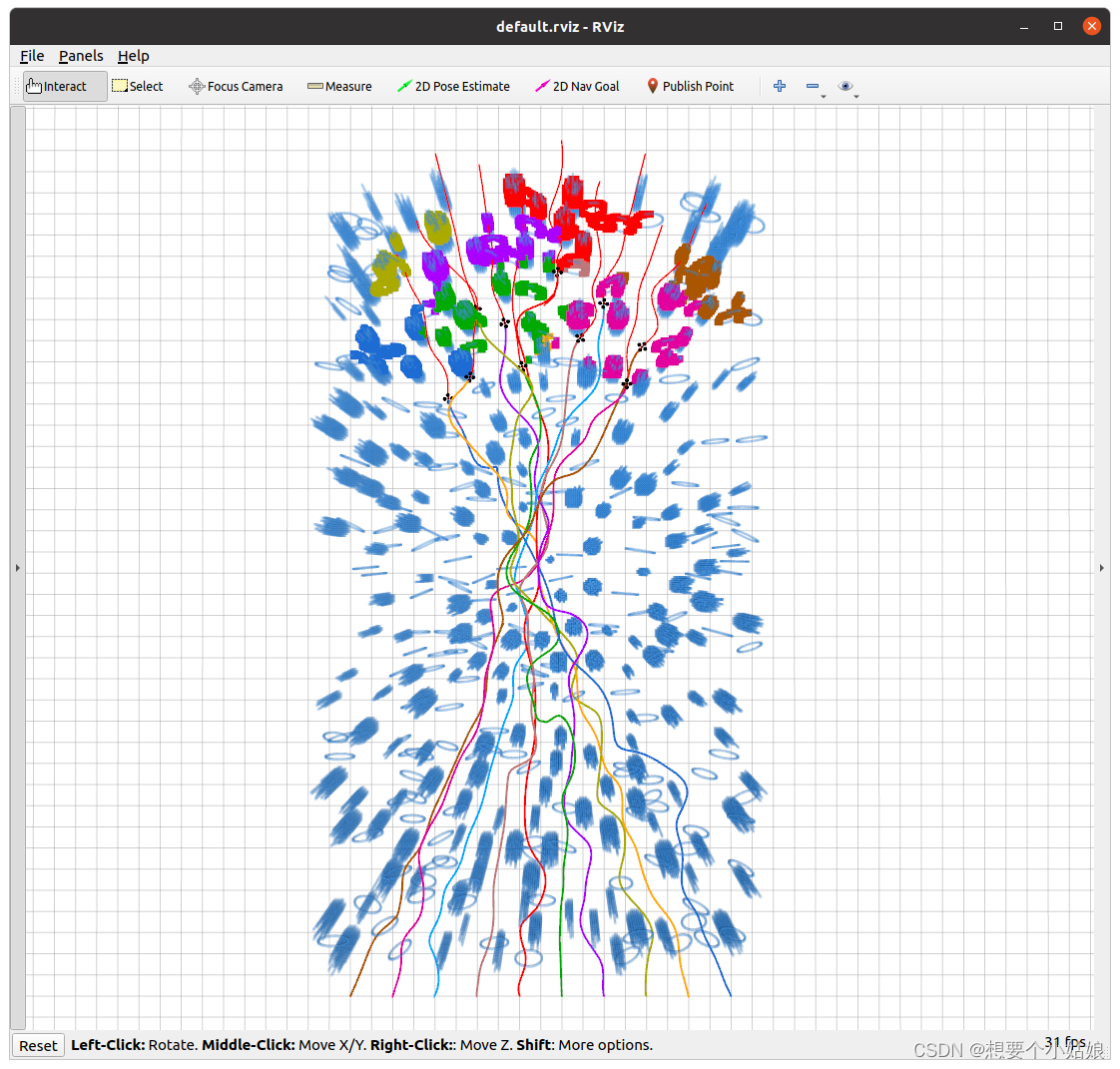
至此,EGO-Swarm 的仿真运行就实现了!
3.2 EGO-Swarm 实验
由于条件有限,我么在此仅仅只是将 EGO-Swarm 与 VINS-Fusion 进行连接,并且这里只涉及单个无人机(在这种情况下 EGO-Swarm 与 EGO-Planner 是等价的),其中 EGO-Swarm 单个无人机通过 VINS-Fusion 来获取里程计信息,同时通过深度相机数据来获取周围环境的情况。
3.2.1 创建文件配置
首先需要配置实验用的一些参数,对应于仿真中的 advanced_param.xml 文件,
其次需要配置调用 VINS-Fusion 里程计信息和 Realsense 深度相机信息的 launch 启动文件,对应于仿真中的 single_run_in_sim.launch 文件,
此外还需要用于可视化的 rviz 文件,对应于仿真中的 default.rviz 文件,
具体的配置可以参考 FAST-LAB 实验室的 fast-drone-250 中采用的 xml 和 launch 文件:
GitHub - ZJU-FAST-Lab/Fast-Drone-250: hardware and software design of the 250mm autonomous drone
主要是如下三个文件

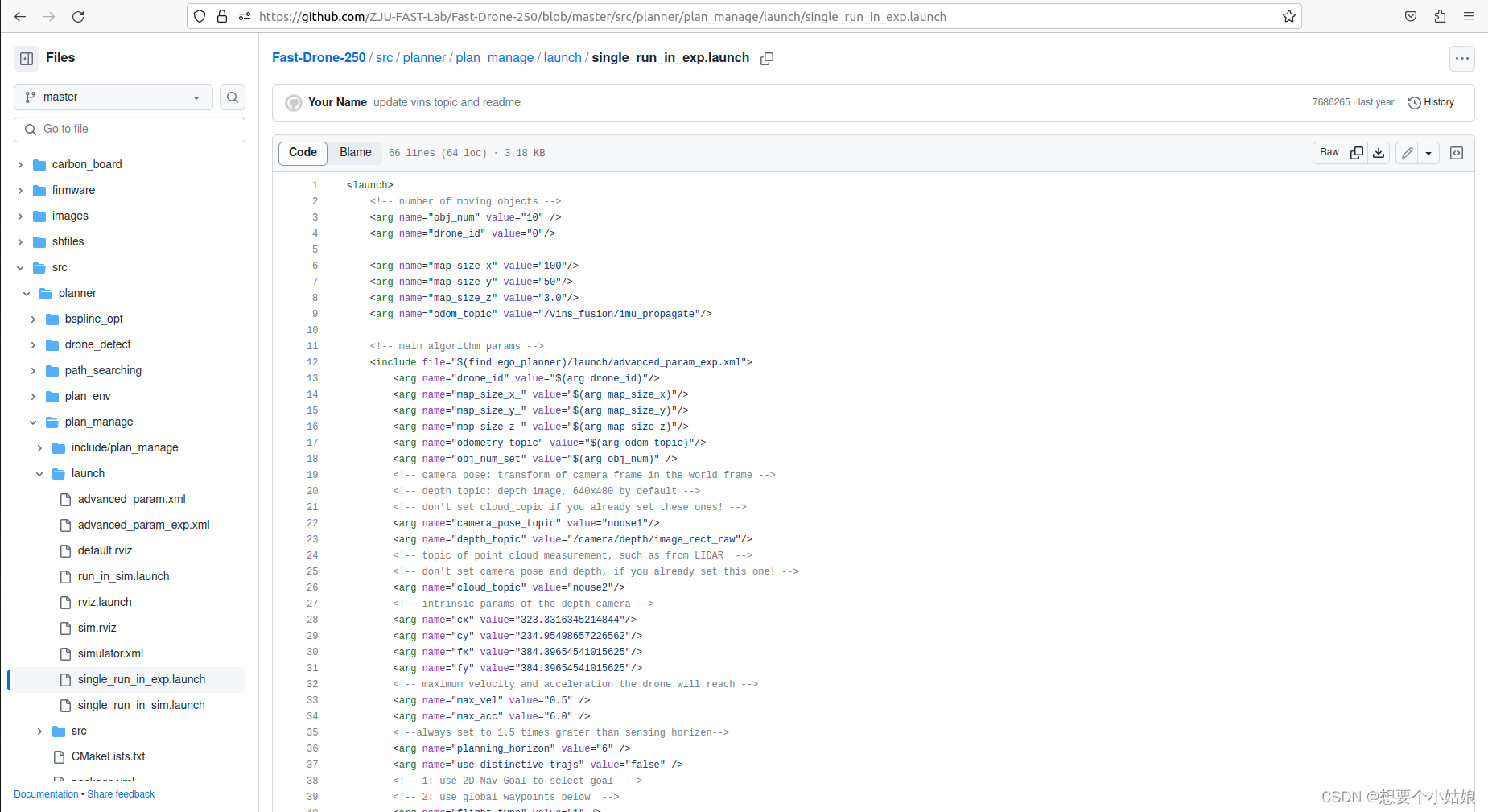

但是由于 VINS-Fusion 中里程计发布的话题是 /vins_estimator/imu_propagate,而上面订阅的话题是 /vins_fusion/imu_propagate,这是因为在 fast-drone-250 中,vins_estimator 节点被重命名为了 vins_fusion,从而产生了差异,只需修改以下订阅的话题即可,其余的可以不做修改,(当然如果标定了相机内外参以及 imu 的噪声,则可以将之后的数据修改上去,VINS-Fusion 或者 EGO-Swarm 上都要修改),具体操作如下
在 ~/catkin_ws/src/ego-planner-swarm/src/planner/plan_manage/launch/ 路径下创建四个文件
(1)advanced_param_exp.xml,其内容如下
<launch><arg name="map_size_x_"/><arg name="map_size_y_"/><arg name="map_size_z_"/><arg name="odometry_topic"/><arg name="camera_pose_topic"/><arg name="depth_topic"/><arg name="cloud_topic"/><arg name="cx"/><arg name="cy"/><arg name="fx"/><arg name="fy"/><arg name="max_vel"/><arg name="max_acc"/><arg name="planning_horizon"/><arg name="point_num"/><arg name="point0_x"/><arg name="point0_y"/><arg name="point0_z"/><arg name="point1_x"/><arg name="point1_y"/><arg name="point1_z"/><arg name="point2_x"/><arg name="point2_y"/><arg name="point2_z"/><arg name="point3_x"/><arg name="point3_y"/><arg name="point3_z"/><arg name="point4_x"/><arg name="point4_y"/><arg name="point4_z"/><arg name="flight_type"/><arg name="use_distinctive_trajs"/><arg name="obj_num_set"/><arg name="drone_id"/><!-- main node --><!-- <node pkg="ego_planner" name="ego_planner_node" type="ego_planner_node" output="screen" launch-prefix="valgrind"> --><node pkg="ego_planner" name="drone_$(arg drone_id)_ego_planner_node" type="ego_planner_node" output="screen"><remap from="~odom_world" to="$(arg odometry_topic)"/><remap from="~planning/bspline" to = "/drone_$(arg drone_id)_planning/bspline"/><remap from="~planning/data_display" to = "/drone_$(arg drone_id)_planning/data_display"/><remap from="~planning/broadcast_bspline_from_planner" to = "/broadcast_bspline"/><remap from="~planning/broadcast_bspline_to_planner" to = "/broadcast_bspline"/><remap from="~grid_map/odom" to="$(arg odometry_topic)"/><remap from="~grid_map/cloud" to="$(arg cloud_topic)"/><remap from="~grid_map/pose" to = "$(arg camera_pose_topic)"/> <remap from="~grid_map/depth" to = "$(arg depth_topic)"/><!-- planning fsm --><param name="fsm/flight_type" value="$(arg flight_type)" type="int"/><param name="fsm/thresh_replan_time" value="1.0" type="double"/><param name="fsm/thresh_no_replan_meter" value="1.0" type="double"/><param name="fsm/planning_horizon" value="$(arg planning_horizon)" type="double"/> <!--always set to 1.5 times grater than sensing horizen--><param name="fsm/planning_horizen_time" value="3" type="double"/><param name="fsm/emergency_time" value="1.0" type="double"/><param name="fsm/realworld_experiment" value="true"/><param name="fsm/fail_safe" value="true"/><param name="fsm/waypoint_num" value="$(arg point_num)" type="int"/><param name="fsm/waypoint0_x" value="$(arg point0_x)" type="double"/><param name="fsm/waypoint0_y" value="$(arg point0_y)" type="double"/><param name="fsm/waypoint0_z" value="$(arg point0_z)" type="double"/><param name="fsm/waypoint1_x" value="$(arg point1_x)" type="double"/><param name="fsm/waypoint1_y" value="$(arg point1_y)" type="double"/><param name="fsm/waypoint1_z" value="$(arg point1_z)" type="double"/><param name="fsm/waypoint2_x" value="$(arg point2_x)" type="double"/><param name="fsm/waypoint2_y" value="$(arg point2_y)" type="double"/><param name="fsm/waypoint2_z" value="$(arg point2_z)" type="double"/><param name="fsm/waypoint3_x" value="$(arg point3_x)" type="double"/><param name="fsm/waypoint3_y" value="$(arg point3_y)" type="double"/><param name="fsm/waypoint3_z" value="$(arg point3_z)" type="double"/><param name="fsm/waypoint4_x" value="$(arg point4_x)" type="double"/><param name="fsm/waypoint4_y" value="$(arg point4_y)" type="double"/><param name="fsm/waypoint4_z" value="$(arg point4_z)" type="double"/><param name="grid_map/resolution" value="0.15" /> <param name="grid_map/map_size_x" value="$(arg map_size_x_)" /> <param name="grid_map/map_size_y" value="$(arg map_size_y_)" /> <param name="grid_map/map_size_z" value="$(arg map_size_z_)" /> <param name="grid_map/local_update_range_x" value="5.5" /> <param name="grid_map/local_update_range_y" value="5.5" /> <param name="grid_map/local_update_range_z" value="4.5" /> <param name="grid_map/obstacles_inflation" value="0.299" /> <param name="grid_map/local_map_margin" value="10"/><param name="grid_map/ground_height" value="-0.01"/><!-- camera parameter --><param name="grid_map/cx" value="$(arg cx)"/><param name="grid_map/cy" value="$(arg cy)"/><param name="grid_map/fx" value="$(arg fx)"/><param name="grid_map/fy" value="$(arg fy)"/><!-- depth filter --><param name="grid_map/use_depth_filter" value="true"/><param name="grid_map/depth_filter_tolerance" value="0.15"/><param name="grid_map/depth_filter_maxdist" value="5.0"/><param name="grid_map/depth_filter_mindist" value="0.2"/><param name="grid_map/depth_filter_margin" value="2"/><param name="grid_map/k_depth_scaling_factor" value="1000.0"/><param name="grid_map/skip_pixel" value="2"/><!-- local fusion --><param name="grid_map/p_hit" value="0.65"/><param name="grid_map/p_miss" value="0.35"/><param name="grid_map/p_min" value="0.12"/><param name="grid_map/p_max" value="0.90"/><param name="grid_map/p_occ" value="0.80"/><param name="grid_map/min_ray_length" value="0.3"/><param name="grid_map/max_ray_length" value="5.0"/><param name="grid_map/visualization_truncate_height" value="1.8"/><param name="grid_map/show_occ_time" value="false"/><param name="grid_map/pose_type" value="2"/> <param name="grid_map/frame_id" value="world"/><!-- planner manager --><param name="manager/max_vel" value="$(arg max_vel)" type="double"/><param name="manager/max_acc" value="$(arg max_acc)" type="double"/><param name="manager/max_jerk" value="4" type="double"/><param name="manager/control_points_distance" value="0.4" type="double"/><param name="manager/feasibility_tolerance" value="0.05" type="double"/><param name="manager/planning_horizon" value="$(arg planning_horizon)" type="double"/><param name="manager/use_distinctive_trajs" value="$(arg use_distinctive_trajs)" type="bool"/><param name="manager/drone_id" value="$(arg drone_id)"/><!-- trajectory optimization --><param name="optimization/lambda_smooth" value="1.0" type="double"/><param name="optimization/lambda_collision" value="0.5" type="double"/><param name="optimization/lambda_feasibility" value="0.1" type="double"/><param name="optimization/lambda_fitness" value="1.0" type="double"/><param name="optimization/dist0" value="0.5" type="double"/><param name="optimization/swarm_clearance" value="0.5" type="double"/><param name="optimization/max_vel" value="$(arg max_vel)" type="double"/><param name="optimization/max_acc" value="$(arg max_acc)" type="double"/><param name="bspline/limit_vel" value="$(arg max_vel)" type="double"/><param name="bspline/limit_acc" value="$(arg max_acc)" type="double"/><param name="bspline/limit_ratio" value="1.1" type="double"/><!-- objects prediction --><param name="prediction/obj_num" value="$(arg obj_num_set)" type="int"/><param name="prediction/lambda" value="1.0" type="double"/><param name="prediction/predict_rate" value="1.0" type="double"/></node></launch>(2)single_run_in_exp.launch,其内容如下
<launch><!-- number of moving objects --><arg name="obj_num" value="10" /><arg name="drone_id" value="0"/><arg name="map_size_x" value="100"/><arg name="map_size_y" value="50"/><arg name="map_size_z" value="3.0"/><arg name="odom_topic" value="/vins_estimator/imu_propagate"/><!-- main algorithm params --><include file="$(find ego_planner)/launch/advanced_param_exp.xml"><arg name="drone_id" value="$(arg drone_id)"/><arg name="map_size_x_" value="$(arg map_size_x)"/><arg name="map_size_y_" value="$(arg map_size_y)"/><arg name="map_size_z_" value="$(arg map_size_z)"/><arg name="odometry_topic" value="$(arg odom_topic)"/><arg name="obj_num_set" value="$(arg obj_num)" /><!-- camera pose: transform of camera frame in the world frame --><!-- depth topic: depth image, 640x480 by default --><!-- don't set cloud_topic if you already set these ones! --><arg name="camera_pose_topic" value="nouse1"/><arg name="depth_topic" value="/camera/depth/image_rect_raw"/><!-- topic of point cloud measurement, such as from LIDAR --><!-- don't set camera pose and depth, if you already set this one! --><arg name="cloud_topic" value="nouse2"/><!-- intrinsic params of the depth camera --><arg name="cx" value="323.3316345214844"/><arg name="cy" value="234.95498657226562"/><arg name="fx" value="384.39654541015625"/><arg name="fy" value="384.39654541015625"/><!-- maximum velocity and acceleration the drone will reach --><arg name="max_vel" value="0.5" /><arg name="max_acc" value="6.0" /><!--always set to 1.5 times grater than sensing horizen--><arg name="planning_horizon" value="6" /><arg name="use_distinctive_trajs" value="false" /><!-- 1: use 2D Nav Goal to select goal --><!-- 2: use global waypoints below --><arg name="flight_type" value="1" /><!-- global waypoints --><!-- It generates a piecewise min-snap traj passing all waypoints --><arg name="point_num" value="1" /><arg name="point0_x" value="15" /><arg name="point0_y" value="0" /><arg name="point0_z" value="1" /><arg name="point1_x" value="0.0" /><arg name="point1_y" value="0.0" /><arg name="point1_z" value="1.0" /><arg name="point2_x" value="15.0" /><arg name="point2_y" value="0.0" /><arg name="point2_z" value="1.0" /><arg name="point3_x" value="0.0" /><arg name="point3_y" value="0.0" /><arg name="point3_z" value="1.0" /><arg name="point4_x" value="15.0" /><arg name="point4_y" value="0.0" /><arg name="point4_z" value="1.0" /></include><!-- trajectory server --><node pkg="ego_planner" name="drone_$(arg drone_id)_traj_server" type="traj_server" output="screen"><!-- <remap from="position_cmd" to="/setpoints_cmd"/> --><remap from="~planning/bspline" to="drone_$(arg drone_id)_planning/bspline"/><param name="traj_server/time_forward" value="1.0" type="double"/></node>
</launch>(3)rviz_exp.launch 文件,其内容如下
<launch><node name="rviz" pkg="rviz" type="rviz" args="-d $(find ego_planner)/launch/default_exp.rviz" required="true" />
</launch>(4)default_exp.rviz 文件,其内容如下
Panels:- Class: rviz/DisplaysHelp Height: 0Name: DisplaysProperty Tree Widget:Expanded:- /Global Options1- /Status1- /drone01/Planning1- /drone01/Planning1/drone_path1/Offset1- /drone01/Mapping1/map inflate1- /Odometry1/Shape1Splitter Ratio: 0.43611112236976624Tree Height: 517- Class: rviz/SelectionName: Selection- Class: rviz/Tool PropertiesExpanded:- /2D Pose Estimate1- /2D Nav Goal1- /Publish Point1Name: Tool PropertiesSplitter Ratio: 0.5886790156364441- Class: rviz/ViewsExpanded:- /Current View1Name: ViewsSplitter Ratio: 0.5- Class: rviz/TimeName: TimeSyncMode: 0SyncSource: map inflate
Preferences:PromptSaveOnExit: true
Toolbars:toolButtonStyle: 2
Visualization Manager:Class: ""Displays:- Alpha: 1Class: rviz/AxesEnabled: trueLength: 1Name: AxesRadius: 0.10000000149011612Reference Frame: <Fixed Frame>Show Trail: falseValue: true- Alpha: 0.5Cell Size: 1Class: rviz/GridColor: 160; 160; 164Enabled: trueLine Style:Line Width: 0.029999999329447746Value: LinesName: GridNormal Cell Count: 0Offset:X: 0Y: 0Z: 0Plane: XYPlane Cell Count: 1000Reference Frame: <Fixed Frame>Value: true- Class: rviz/GroupDisplays:- Class: rviz/GroupDisplays:- Class: rviz/MarkerEnabled: trueMarker Topic: /drone_0_ego_planner_node/goal_pointName: goal_pointNamespaces:{}Queue Size: 100Value: true- Class: rviz/MarkerEnabled: trueMarker Topic: /ego_planner_node/global_listName: global_pathNamespaces:{}Queue Size: 100Value: true- Class: rviz/MarkerEnabled: trueMarker Topic: /drone_0_ego_planner_node/optimal_listName: optimal_trajNamespaces:{}Queue Size: 100Value: true- Class: rviz/MarkerEnabled: falseMarker Topic: /ego_planner_node/a_star_listName: AStarNamespaces:{}Queue Size: 100Value: false- Class: rviz/MarkerEnabled: trueMarker Topic: /drone_0_ego_planner_node/init_listName: InitTrajNamespaces:{}Queue Size: 100Value: true- Alpha: 1Buffer Length: 1Class: rviz/PathColor: 29; 108; 212Enabled: trueHead Diameter: 0.30000001192092896Head Length: 0.20000000298023224Length: 0.30000001192092896Line Style: BillboardsLine Width: 0.10000000149011612Name: drone_pathOffset:X: 0Y: 0Z: 0Pose Color: 255; 85; 255Pose Style: NoneQueue Size: 10Radius: 0.029999999329447746Shaft Diameter: 0.10000000149011612Shaft Length: 0.10000000149011612Topic: /drone_0_odom_visualization/pathUnreliable: falseValue: trueEnabled: trueName: Planning- Class: rviz/GroupDisplays:- Alpha: 1Autocompute Intensity Bounds: trueAutocompute Value Bounds:Max Value: 1.565000057220459Min Value: 0.06499999761581421Value: trueAxis: ZChannel Name: intensityClass: rviz/PointCloud2Color: 29; 108; 212Color Transformer: AxisColorDecay Time: 0Enabled: trueInvert Rainbow: falseMax Color: 255; 255; 255Min Color: 0; 0; 0Name: map inflatePosition Transformer: XYZQueue Size: 10Selectable: trueSize (Pixels): 3Size (m): 0.15000000596046448Style: BoxesTopic: /drone_0_ego_planner_node/grid_map/occupancy_inflateUnreliable: falseUse Fixed Frame: trueUse rainbow: trueValue: trueEnabled: trueName: Mapping- Class: rviz/GroupDisplays:- Class: rviz/MarkerEnabled: trueMarker Topic: /drone_0_odom_visualization/robotName: robotNamespaces:{}Queue Size: 100Value: true- Class: rviz/ImageEnabled: falseImage Topic: /drone_0_pcl_render_node/depthMax Value: 1Median window: 5Min Value: 0Name: depthNormalize Range: trueQueue Size: 2Transport Hint: rawUnreliable: falseValue: falseEnabled: trueName: SimulationEnabled: trueName: drone0- Class: rviz/ImageEnabled: falseImage Topic: /camera/depth/image_rect_rawMax Value: 1Median window: 5Min Value: 0Name: ImageNormalize Range: trueQueue Size: 2Transport Hint: rawUnreliable: falseValue: false- Alpha: 1Buffer Length: 1Class: rviz/PathColor: 25; 255; 0Enabled: trueHead Diameter: 0.30000001192092896Head Length: 0.20000000298023224Length: 0.30000001192092896Line Style: LinesLine Width: 0.029999999329447746Name: PathOffset:X: 0Y: 0Z: 0Pose Color: 255; 85; 255Pose Style: NoneQueue Size: 10Radius: 0.029999999329447746Shaft Diameter: 0.10000000149011612Shaft Length: 0.10000000149011612Topic: /vins_estimator/pathUnreliable: falseValue: true- Angle Tolerance: 0.10000000149011612Class: rviz/OdometryCovariance:Orientation:Alpha: 0.5Color: 255; 255; 127Color Style: UniqueFrame: LocalOffset: 1Scale: 1Value: truePosition:Alpha: 0.30000001192092896Color: 204; 51; 204Scale: 1Value: trueValue: trueEnabled: trueKeep: 1Name: OdometryPosition Tolerance: 0.10000000149011612Queue Size: 10Shape:Alpha: 1Axes Length: 0.5Axes Radius: 0.20000000298023224Color: 255; 25; 0Head Length: 0.30000001192092896Head Radius: 0.10000000149011612Shaft Length: 1Shaft Radius: 0.05000000074505806Value: AxesTopic: /vins_estimator/odometryUnreliable: falseValue: trueEnabled: trueGlobal Options:Background Color: 255; 255; 255Default Light: trueFixed Frame: worldFrame Rate: 30Name: rootTools:- Class: rviz/InteractHide Inactive Objects: true- Class: rviz/Select- Class: rviz/FocusCamera- Class: rviz/Measure- Class: rviz/SetInitialPoseTheta std deviation: 0.2617993950843811Topic: /initialposeX std deviation: 0.5Y std deviation: 0.5- Class: rviz/SetGoalTopic: /move_base_simple/goal- Class: rviz/PublishPointSingle click: trueTopic: /clicked_pointValue: trueViews:Current:Class: rviz/ThirdPersonFollowerDistance: 14.900397300720215Enable Stereo Rendering:Stereo Eye Separation: 0.05999999865889549Stereo Focal Distance: 1Swap Stereo Eyes: falseValue: falseField of View: 0.7853981852531433Focal Point:X: -1.706774115562439Y: -2.435426712036133Z: 5.149927346792538e-06Focal Shape Fixed Size: trueFocal Shape Size: 0.05000000074505806Invert Z Axis: falseName: Current ViewNear Clip Distance: 0.009999999776482582Pitch: 1.0197973251342773Target Frame: <Fixed Frame>Yaw: 3.5065858364105225Saved:- Class: rviz/FPSEnable Stereo Rendering:Stereo Eye Separation: 0.05999999865889549Stereo Focal Distance: 1Swap Stereo Eyes: falseValue: falseInvert Z Axis: falseName: FPSNear Clip Distance: 0.009999999776482582Pitch: 0.4000000059604645Position:X: -11Y: 0Z: 8Roll: 0Target Frame: my_viewYaw: 0- Class: rviz/FPSEnable Stereo Rendering:Stereo Eye Separation: 0.05999999865889549Stereo Focal Distance: 1Swap Stereo Eyes: falseValue: falseInvert Z Axis: falseName: FPSNear Clip Distance: 0.009999999776482582Pitch: 0.5Position:X: -10Y: 0Z: 10Roll: 0Target Frame: my_viewYaw: 0- Class: rviz/FPSEnable Stereo Rendering:Stereo Eye Separation: 0.05999999865889549Stereo Focal Distance: 1Swap Stereo Eyes: falseValue: falseInvert Z Axis: falseName: FPSNear Clip Distance: 0.009999999776482582Pitch: 0.6000000238418579Position:X: -10Y: 0Z: 10Roll: 0Target Frame: my_viewYaw: 0
Window Geometry:Displays:collapsed: falseHeight: 668Hide Left Dock: falseHide Right Dock: falseImage:collapsed: falseQMainWindow State: 000000ff00000000fd00000004000000000000017b00000242fc0200000024fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073000000003d00000242000000c900fffffffb0000000a0049006d006100670065000000015d000001220000001600fffffffb0000000a0056006900650077007300000001ee000000ad000000a400fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261fb0000000c00430061006d00650072006100000001d1000000b50000000000000000fb0000000a00640065007000740068000000031d000002310000001600fffffffb0000000a0049006d0061006700650100000415000000f80000000000000000fb0000000a0049006d00610067006501000003f4000001190000000000000000fb0000000a0064006500700074006800000004a2000000ac0000000000000000fb0000000a0064006500700074006800000003b4000001b60000000000000000fb0000000a0064006500700074006800000004b9000000950000000000000000fb0000000a006400650070007400680000000481000000cd0000000000000000fb0000000a006400650070007400680000000429000001250000000000000000fb0000000a0064006500700074006800000003b7000000af0000000000000000fb0000000a0064006500700074006800000003d5000000b50000000000000000fb0000000a006400650070007400680000000444000001260000000000000000fb0000000a00640065007000740068000000041f0000014b0000000000000000fb0000000a0064006500700074006800000001b8000000160000000000000000fb0000000a0064006500700074006800000001c1000000160000000000000000fb0000000a0064006500700074006800000004b1000000550000000000000000fb0000000a006400650070007400680000000505000000650000000000000000fb0000000a006400650070007400680000000502000000680000000000000000fb0000000a0064006500700074006800000004f9000000710000000000000000fb0000000a0064006500700074006800000004e9000000810000000000000000fb0000000a0064006500700074006800000004de0000008c0000000000000000fb0000000a0064006500700074006800000004cc0000009e0000000000000000fb0000000a0064006500700074006800000004bb000000af0000000000000000fb0000000a0064006500700074006800000004aa000000c00000000000000000fb0000000a006400650070007400680000000498000000d20000000000000000fb0000000a0049006d00610067006500000003fa000001540000000000000000000000010000010f00000385fc0200000002fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000006100000003bfc0100000002fb0000000800540069006d00650000000000000006100000041800fffffffb0000000800540069006d00650100000000000004500000000000000000000002600000024200000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000Selection:collapsed: falseTime:collapsed: falseTool Properties:collapsed: falseViews:collapsed: falseWidth: 608X: 1265Y: 60depth:collapsed: false修改完成后保存即可!
3.2.2 VINS-Fusion-gpu + EGO-Swarm 实验
接下来我们先运行 Realsense 和 VINS-Fusion-gpu,如果没有安装 Realsense 和 VINS-Fusion-gpu,参考以下两篇文章
Jetson Orin NX 开发指南(4): 安装 CUDA 和 Realsense_想要个小姑娘的博客-CSDN博客
Jetson Orin NX 开发指南(6): VINS-Fusion-gpu 的编译和运行_想要个小姑娘的博客-CSDN博客
首先打开超级终端,划分为四个终端,
然后在第一个终端输入
roslaunch realsense2_camera rs_camera.launch在第二个终端输入
source ~/catkin_ws/src/vins-fusion-gpu/devel/setup.bash
roslaunch vins realsense_d435i.launch第三个终端输入
source ~/catkin_ws/src/ego-planner-swarm/devel/setup.bash
roslaunch ego_planner single_run_in_exp.launch第四个终端输入
source ~/catkin_ws/src/ego-planner-swarm/devel/setup.bash
roslaunch ego_planner rviz_exp.launch如下所示

依次运行后显示如下结果

相关文章:
Jetson Orin NX 开发指南(7): EGO-Swarm 的编译与运行
一、前言 EGO-Planner 浙江大学 FAST-LAB 实验室的开源轨迹规划算法是,受到 IEEE Spectrum 等知名科技媒体的报道,其理论技术较为前沿,是一种不依赖于ESDF,基于B样条的规划算法,并且规划成功率、算法消耗时间、代价数…...
nginx的重定向
nginx重定向--rewrite重写功能介绍 rewrite 的功能介绍 rewrite功能就是,使用nginx提供的全局变量或自己设置的变量,结合正则表达式和标记位实现URL重写以及重定向。 比如:更换域名后需要保持旧的域名能跳转到新的域名上、某网页发生改变需…...
和切片(Slice))
理解Go中的数组(Array)和切片(Slice)
引言 在Go中,数组和切片是由有序的元素序列组成的数据结构。当需要处理许多相关值时,这些数据集非常适合使用。它们使你能够将本应放在一起的数据放在一起,压缩代码,并一次性对多个值执行相同的方法和操作。 尽管Go中的数组和切…...

计算机毕业设计选什么题目好?springboot 高校学生综合测评管理系统
✍✍计算机编程指导师 ⭐⭐个人介绍:自己非常喜欢研究技术问题!专业做Java、Python、微信小程序、安卓、大数据、爬虫、Golang、大屏等实战项目。 ⛽⛽实战项目:有源码或者技术上的问题欢迎在评论区一起讨论交流! ⚡⚡ Java实战 |…...

在liunx下读取串口的数据
1. 设置串口参数 首先是通过stty工具设置串口参数: sudo stty -F /dev/ttyUSB0 比特率 cs8 -cstopb如:sudo stty -F /dev/ttyUSB0 115200 cs8 -cstopb. 注意: 需要注意的是这里需要sudo权限; 2. 读取串口数据 然后读取串口的…...
Python中使用IDLE调试程序
在IDLE中,使用菜单栏中的“Debug”对IDLE打开的python程序进行调试。 1 打开调试开关 选择IDLE菜单栏的“Debug->Debugger”,如图1①所示;此时在IDLE中会显示“[DEBUG ON]”,即“调试模式已打开”,如图1②所示&am…...

发个地区和对应的价格方案
在当今数字化的世界中,网络工程师面临着各种挑战,从跨界电商到爬虫,从出海业务到网络安全,再到游戏领域。为了应对这些挑战,网络工程师需要了解并利用各种技术,其中Socks5代理和代理IP技术成为了他们的得力…...

启动Java应用的黑魔法:初始化性能解密@PostConstrut,InitialzingBean,init-method,BeanPostProcessor
我们在项目中经常会遇到启动时做一些逻辑的处理,比如配置信息的预加载,缓存信息的预加载等等,那都有哪些方法了,我们一起来探讨一下: 1. 方式 1. 构造方法初始化: 使用构造方法进行对象的基本属性初始化。…...

STM32-C语言结构体地址
定义2个结构体 typedef struct _demo_node_{ //结构体本身的地址struct _demo_node_* pprenode; //实际地址开始的位置,最下面的输出结果可以看出struct _demo_node_* pnextnode;unsigned long member_num;unsigned short age;char addr[0]; …...
)
Go HTTP 调用(下)
今天分享的内容是 Go HTTP 调用。如果本文对你有帮助,不妨点个赞,如果你是 Go 语言初学者,不妨点个关注,一起成长一起进步,如果本文有错误的地方,欢迎指出! 前言 上篇文章 Go HTTP 调用&#…...

mysql5.7获取json数组中的某个对象
前言 表中的一个字段类型是字符串,存的是一个对象数据。 现在要根据对象中的某个属性,获取到整个对象信息。 如果是mysql8,则可以使用JSON_TABLE。 示例:https://blog.csdn.net/weixin_44071721/article/details/123347229 sele…...
PTE考试解析
Pte 考试题目 注入漏洞 空格被过滤 用/**/代替空格,发现#被过滤 对#进行url编码为%23 输入构造好的payload http://172.16.12.100:81/vulnerabilities/fu1.php?id1%27)/**/and/**/11%23 http://172.16.12.100:81/vulnerabilities/fu1.php?id1%27)/*…...
UE4和C++ 开发-UE4怎么删除C++类
1 关闭visual stdio,关闭UE4引擎。 2 打开你的项目文件夹。找到你要删除的.h,.cpp文件删除。 3、删除Binaries文件夹。 4 右击.uproiect文件,点击Generate Visual Studio project files. 5 双击.uproiect文件,忽略警告打开就看到已经删除了想要删除的C类…...
基于图像识别的迁移学习之一
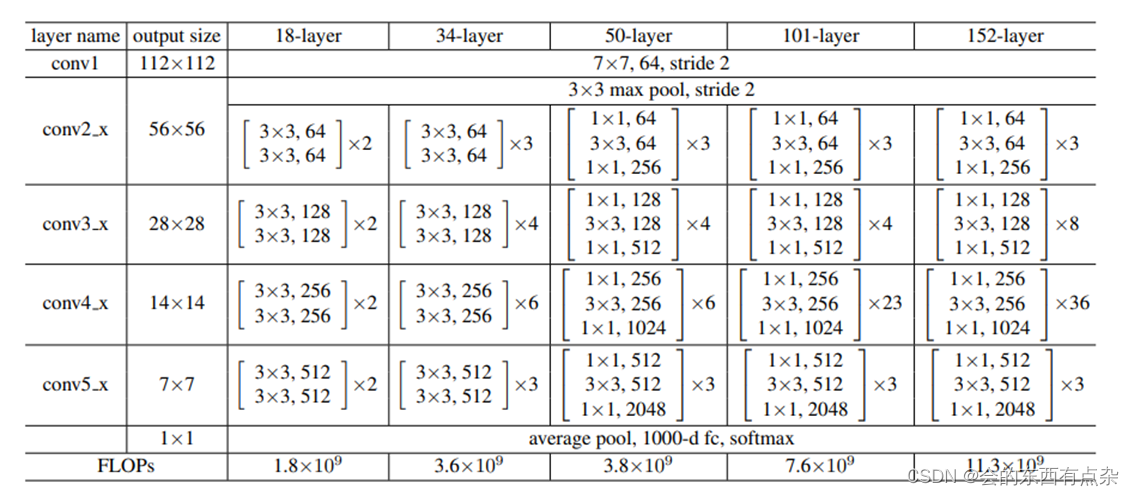
案例分析 加载数据部分同上一个案例,只需把数据输入到预训练的VGG-16或者ResNet50中。VGG-16的网络结构为右侧图绿色栏所示,其中block1中有2个包含64个卷积核的卷积层,block2包含2个128个卷积核的卷积层,block3有3个包含256个卷积…...
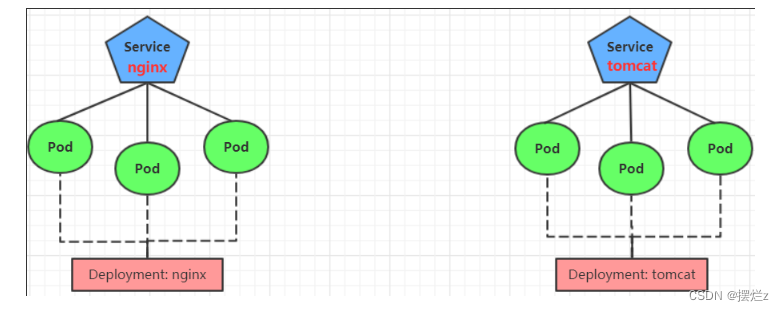
k8s使用
一、Kubernetes好处 kubernetes,是一个全新的基于容器技术的分布式架构领先方案,是谷歌严格保密十几年的秘密武器----Borg系统的一个开源版本,于2014年9月发布第一个版本,2015年7月发布第一个正式版本。 kubernetes的本质…...
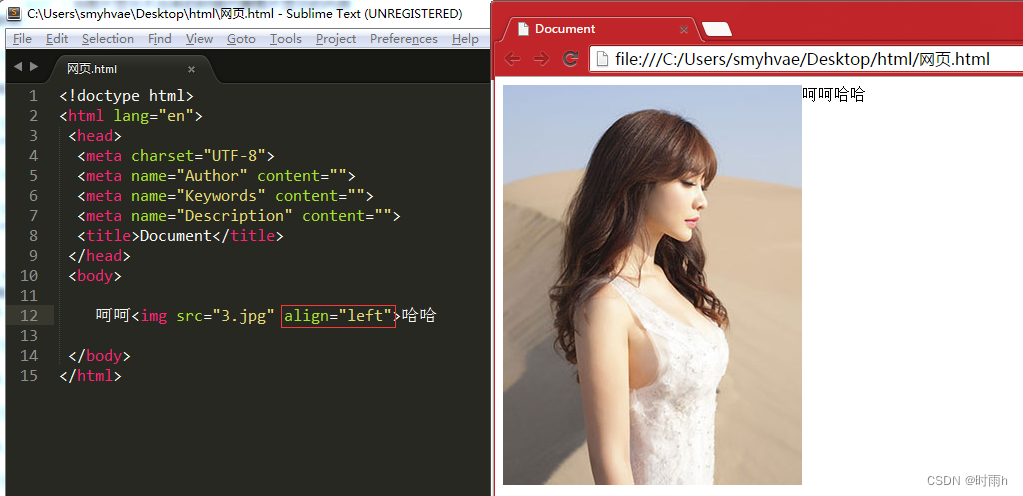
HTML图片标签(2) HTML5+CSS3+移动web 前端开发入门笔记(三)
图片标签 HTML中,可以使用标签来插入图片。具体的语法为: <img src"图片路径" alt"替代文本">其中,src属性用于指定图片的路径,可以是相对路径或绝对路径。常见的有相对当前HTML文件的路径࿰…...

jwttoken+redis+springsecurity
思路 jwttoken不设置过期时间 redis管理过期时间,并且续签 redis中key"login:"userId, valuejwtUser 再次访问时,解析token中userId,并且根据过期时间自动续签JWT 实现登录认证 Token 自动续期方案 pom文件配置 <!--Redis--&…...
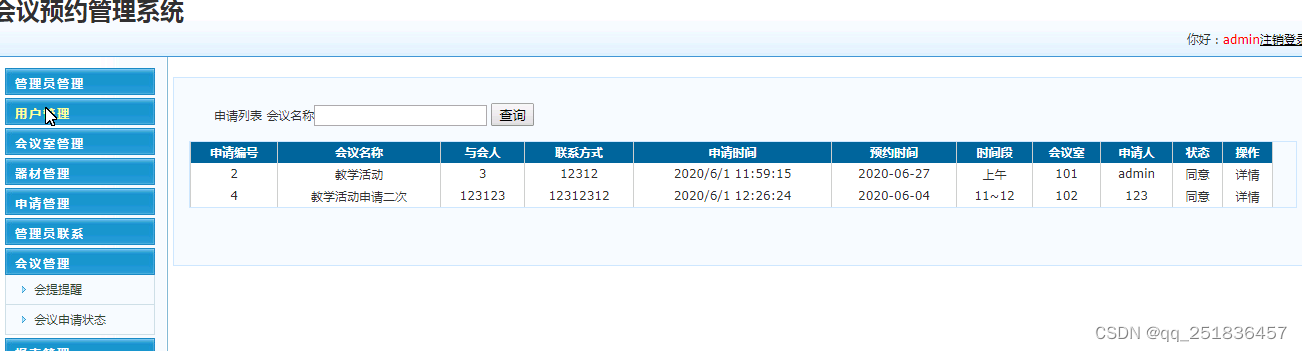
asp.net会议预约管理系统VS开发sqlserver数据库web结构c#编程Microsoft Visual Studio
一、源码特点 asp.net 会议预约管理系统 是一套完善的web设计管理系统,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。开发环境为vs2010,数据库为sqlserver2008,使用c#语 言开发 asp.net 会议预约管理系统 二、…...
十六、【橡皮擦工具组】
文章目录 橡皮擦背景橡皮擦1. 一次取样2. 连续取样3. 取样背景色板 魔术橡皮擦 橡皮擦 橡皮擦跟我们平常生活中所用的橡皮擦是一样,它是将图层的内容擦除,只剩下空白部分。另外当我们按住Alt的键去擦除空白部分的时候,也可以将背景的部分显示出来。 另…...

BAT学习——计算当前路径下指定格式文件的MD5值,将文件名与MD5值写入文本
将以下内容粘贴到bat脚本中,双击运行,生成MD5.txt文件,需要其他格式,修改循环中的.rar 多个格式使用or分开 *.rar or *.bat脚本内容 echo off setlocal enabledelayedexpansionrem 设置输出文件名 set "outputFileMD5.txt&…...

Windows与Office激活神器:KMS_VL_ALL_AIO使用全攻略
Windows与Office激活神器:KMS_VL_ALL_AIO使用全攻略 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows和Office的激活问题头疼吗?每次看到那个烦人的"激…...
)
Win10显示器关闭就锁屏?一个注册表键值让你告别烦人锁屏(附详细路径)
Win10显示器关闭后自动锁屏的终极解决方案:注册表深度优化指南 1. 问题背景与用户痛点 每当我们在Windows 10系统中设置显示器自动关闭以节省能源时,常常会遇到一个令人困扰的现象:显示器关闭后不久,系统就会自动进入锁屏状态。这…...

如何用QKeyMapper实现Windows键鼠手柄自由映射:免费开源终极指南
如何用QKeyMapper实现Windows键鼠手柄自由映射:免费开源终极指南 【免费下载链接】QKeyMapper [按键映射工具] QKeyMapper,Qt开发Win10&Win11可用,不修改注册表、不需重新启动系统,可立即生效和停止。支持游戏手柄映射到键鼠&…...

Office Custom UI Editor:终极指南:如何彻底改造你的Office工作界面?
Office Custom UI Editor:终极指南:如何彻底改造你的Office工作界面? 【免费下载链接】office-custom-ui-editor Standalone tool to edit custom UI part of Office open document file format 项目地址: https://gitcode.com/gh_mirrors/…...
GitGitHub实操图文详解教程(05)—git init命令)
(最新版)GitGitHub实操图文详解教程(05)—git init命令
版权声明 本文原创作者:谷哥的小弟 作者博客地址:http://blog.csdn.net/lfdfhl 1. 应用场景 git init 用于将一个普通目录初始化为 Git 仓库,从而使 Git 开始对该目录及其文件进行版本管理。 在实际开发中,常见应用场景包括: 新建本地项目 当你创建一个 Spring Boot 项目…...

PSoC时钟系统深度解析:从架构原理到配置避坑指南
1. 项目概述:为什么PSoC的时钟值得你花时间研究?如果你刚开始接触Cypress(现Infineon)的PSoC系列微控制器,可能会觉得它的开发环境PSoC Creator功能强大但有点复杂。在众多需要配置的模块里,时钟系统往往是…...

7B秒杀70B!大模型微调秘籍全解:从理论到实战,玩转高效适配!
本文系统介绍了大模型微调的理论框架与实践流程。阐述了微调的必要性,即弥补通用大模型在领域知识、输出格式及行为对齐上的不足,并说明微调效果可超越更大参数的未微调模型。文章深入解析了微调原理,对比了全参数微调与高效微调(…...

Claude Code开发者大会系列5:如何打造“AI原生工程师”文化
2026年5月,Anthropic在“Code w/ Claude”大会上发布Managed Agents多智能体编排能力,Netflix的生产环境实践成为全场焦点。大会的核心信息只有一句话:AI模型能力正以“指数级”增长,而大多数企业的开发模式仍停留在“线性”阶段。…...

开源阅读鸿蒙版:打造您的个性化无广告数字图书馆
开源阅读鸿蒙版:打造您的个性化无广告数字图书馆 【免费下载链接】legado-Harmony 开源阅读鸿蒙版仓库 项目地址: https://gitcode.com/gh_mirrors/le/legado-Harmony legado-Harmony是一款专为鸿蒙系统设计的开源电子书阅读器,它为您提供纯净的阅…...

如何高效配置跨平台网盘直链解析工具:技术实现与实战指南
如何高效配置跨平台网盘直链解析工具:技术实现与实战指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天…...