STM32_PID通用算法增量式和位置式
STM32_PID通用算法增量式和位置式
前言:
此算法为入门级PID算法,调试好参数后可应用于温度控制、舵机控制、直流电机的转速控制和直流电机的角度控制等等,下面就以温度控制举例
pid.c
#include "pid.h"
#include "sensor.h"
#include "dev_control.h"
#include "usbd_cdc_if.h"pidTypeDef_t heatTemp_pid = {0};
pidPID_t tempPID = {0};void pidInit(void)
{tempPID.KP = 15; //比例常数tempPID.KI = 0; //积分常数tempPID.KD = 0.1; //微分常数heatTemp_pid.PidMode = 0; //使用增量式PIDheatTemp_pid.SetPoint = 0; //设定目标值heatTemp_pid.ActualValue = 0.0; //期望值输出heatTemp_pid.SumError = 0.0; //积分值heatTemp_pid.Error = 0.0; //当前偏差值heatTemp_pid.LastError = 0.0; //上次偏差值heatTemp_pid.PrevError = 0.0; //上上次偏差值heatTemp_pid.Proportion = tempPID.KP; //比例常数heatTemp_pid.Integral = tempPID.KI; //积分常数heatTemp_pid.Derivative = tempPID.KD; //微分常数
}void pidTask(void)//根据系统来计算调用该函数的周期
{if(devTypedef.devHeatAir.devHeatAirEnable == STATE_ENABLE){heatTemp_pid.SetPoint = (float)sensorData.ptcSensorData.ptcSensorData_target;heatTemp_pid.ActualValue = pidComputeCtrl(&heatTemp_pid, (float)sensorData.ptcSensorData.ptcSensorData_float);//¼ÆËã³öPIDÊä³öÖµif(heatTemp_pid.ActualValue < 0) heatTemp_pid.ActualValue = 0;if(heatTemp_pid.ActualValue > 100) heatTemp_pid.ActualValue = 100;devTypedef.devHeatAir.devHeatAirDuty = heatTemp_pid.ActualValue;//作用到控制设备上//调试信息usb_printf("%0.2f,%0.2f,%0.2f\r\n",heatTemp_pid.SetPoint,(float)sensorData.ptcSensorData.ptcSensorData_float,heatTemp_pid.ActualValue);}
}float pidComputeCtrl(pidTypeDef_t *PID, float feedbackValue)
{PID->Error = (float)(PID->SetPoint - feedbackValue); //计算偏差if(PID->PidMode == 1) //增量式PID{PID->ActualValue += (PID->Proportion * (PID->Error - PID->LastError)) //比例环节+ (PID->Integral * PID->Error) //积分环节+ (PID->Derivative * (PID->Error - 2 * PID->LastError + PID->PrevError)); //微分环节PID->PrevError = PID->LastError; //更新历史偏差PID->LastError = PID->Error;}else //位置式PID{PID->SumError += PID->Error;float pid_integral = 0;pid_integral = PID->Integral * PID->SumError; //限积分算法if(pid_integral > 5) pid_integral = 5;PID->ActualValue = (PID->Proportion * PID->Error) //比例环节+ pid_integral //积分环节+ (PID->Derivative * (PID->Error - PID->LastError)); //微分环节PID->LastError = PID->Error;}return (PID->ActualValue); //返回计算后的结果
}
pid.h
#ifndef __PID_H
#define __PID_H
#include "main.h"
#include "log.h"#define PID_TASK_PERIOD 1 //#define PID_LOG_EN 1
#if PID_LOG_EN#define PID_printf(format, ...) printf(RTT_CTRL_TEXT_WHITE format , ##__VA_ARGS__)//"\r\n"#define PID_info(format, ...) printf(RTT_CTRL_TEXT_GREEN"[pid]info:" format , ##__VA_ARGS__)#define PID_debug(format, ...) printf(RTT_CTRL_TEXT_WHITE"[pid]debug:" format , ##__VA_ARGS__)#define PID_warning(format, ...) printf(RTT_CTRL_TEXT_YELLOW"[pid]warning:" format , ##__VA_ARGS__)#define PID_error(format, ...) printf(RTT_CTRL_TEXT_RED"[pid]error:" format ,##__VA_ARGS__)
#else#define PID_printf(format, ...)#define PID_info(format, ...)#define PID_debug(format, ...)#define PID_warning(format, ...)#define PID_error(format, ...)
#endiftypedef struct
{float KP;float KI;float KD;
} pidPID_t;extern pidPID_t pressurePID;
extern pidPID_t tempPID;//PID参数结构体
typedef struct
{float SetPoint; //设定目标值float ActualValue; //期望值输出float SumError; //积分值float Proportion; //比例常数float Integral; //积分常数float Derivative; //微分常数float Error; //当前偏差值float LastError; //上次偏差值float PrevError; //上上次偏差值unsigned int PidMode; //使用PID模式
} pidTypeDef_t;extern pidTypeDef_t heatTemp_pid; //加热系统PID参数结构体extern unsigned char pid_flag;void pidInit(void);
void pidTask(void);
float pidComputeCtrl(pidTypeDef_t *PID, float feedbackValue);#endif相关文章:

STM32_PID通用算法增量式和位置式
STM32_PID通用算法增量式和位置式 前言: 此算法为入门级PID算法,调试好参数后可应用于温度控制、舵机控制、直流电机的转速控制和直流电机的角度控制等等,下面就以温度控制举例 pid.c #include "pid.h" #include "sensor.h&q…...

Spark的数据输入、数据计算、数据输出
PySpark的编程,主要氛围三大步骤:1)数据输入、2)数据处理计算、3)数据输出 1)数据输入:通过SparkContext对象,晚上数据输入 2)数据处理计算:输入数据后得到RDD对象,对RDD…...
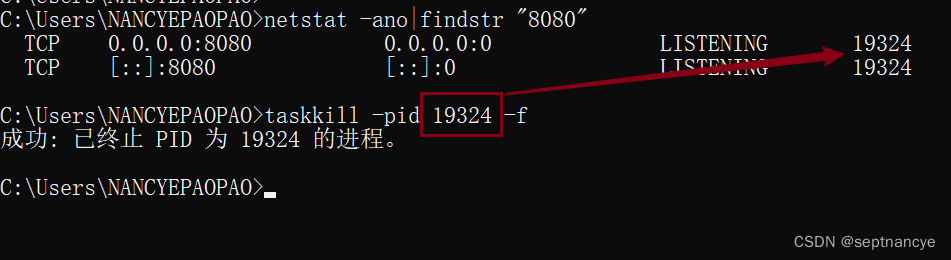
Windows端口号被占用的查看方法及解决办法
Windows端口号被占用的查看方法及解决办法 Error starting ApplicationContext. To display the conditions report re-run your application with debug enabled. 2023-10-14 22:58:32.069 ERROR 6488 --- [ main] o.s.b.d.LoggingFailureAnalysisReporter : ***…...
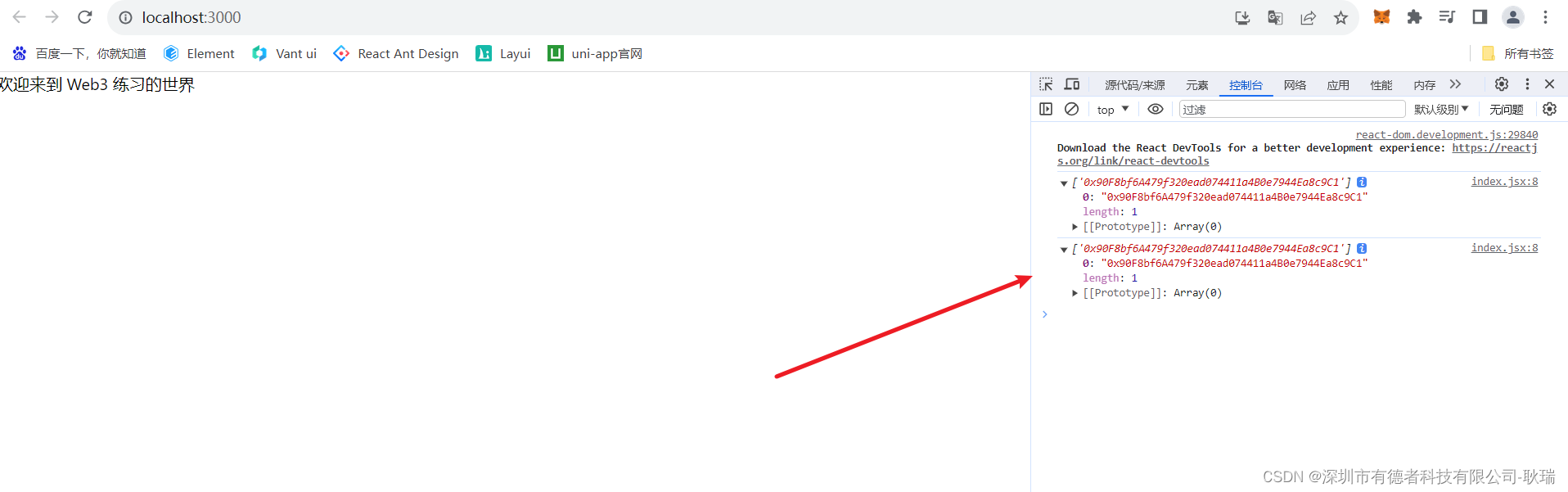
Web3 整理React项目 导入Web3 并获取区块链信息
上文 WEB3 创建React前端Dapp环境并整合solidity项目,融合项目结构便捷前端拿取合约 Abi 我们用react 创建了一个 dapp 项目 并将前后端代码做了个整合 那么 我们就来好好整理一下 我们的前端react的项目结构 我们在 src 目录下创建一个 components 用来存放我们的…...

基于SpringBoot的旅游网站开题报告
一、选题背景 随着旅游业的蓬勃发展和人们对旅游需求的增长,开发一个基于Spring Boot的旅游网站具有重要的意义。传统的旅行社模式逐渐不能满足人们个性化、多样化的旅游需求,因此开发一个在线旅游网站能够为用户提供更加便捷、灵活、个性化的旅游服务&…...
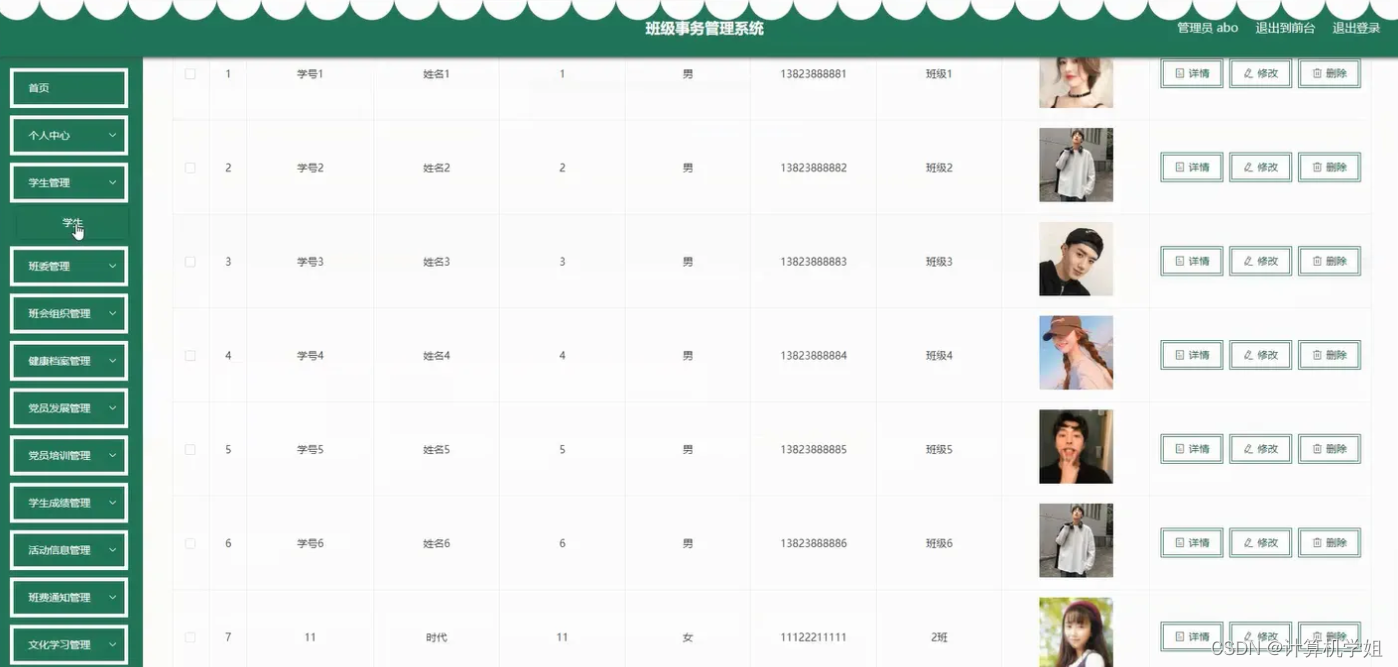
基于SSM的班级事务管理系统
基于SSM的班级事务管理系统 开发语言:Java数据库:MySQL技术:SpringSpringMVCMyBatisVue工具:IDEA/Ecilpse、Navicat、Maven 系统展示 前台界面 登录界面 班委界面 学生界面 管理员界面 摘要 基于SSM(Spring、Spring…...

基于Spring Boot开发的汽车租赁管理系统
文章目录 项目介绍主要功能截图:后台前台部分代码展示设计总结项目获取方式🍅 作者主页:超级无敌暴龙战士塔塔开 🍅 简介:Java领域优质创作者🏆、 简历模板、学习资料、面试题库【关注我,都给你】 🍅文末获取源码联系🍅 项目介绍 基于Spring Boot开发的汽车租赁…...
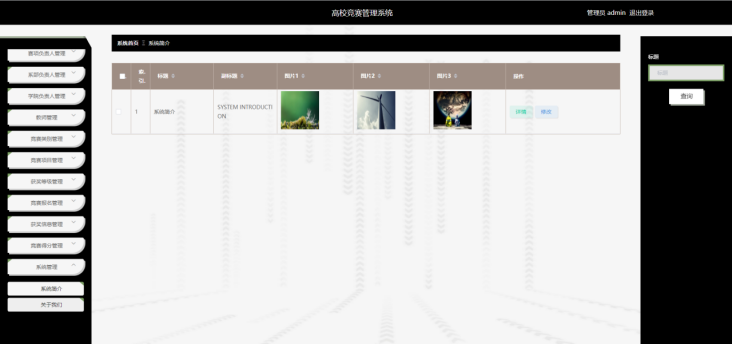
精品基于django的高校竞赛比赛管理系统Python
《[含文档PPT源码等]精品基于django的高校竞赛管理系统》该项目含有源码、文档、PPT、配套开发软件、软件安装教程、项目发布教程等! 软件开发环境及开发工具: 开发语言:python 使用框架:Django 前端技术:JavaScri…...

RustDay04------Exercise[01-10]
1.做题须知 这一题告诉我们可以尝试修改下面的输出,在觉得OK之后删除// I AM NOT DONE注释即可进入下一题 // intro1.rs // About this I AM NOT DONE thing: // We sometimes encourage you to keep trying things on a given exercise, even // after you already figured …...
ARM day9
src/key_it.c #include "key_it.h" #include "led.h" void key_it_config() {//RCC使能GPIOF时钟RCC->MP_AHB4ENSETR | (0x1<<5);//设置PF9 PF7 PF8GPIO输入//PF9GPIOF->MODER & (~(0x3<<18));//PF8GPIOF->MODER & (~(0x3&l…...
【TensorFlow2 之013】TensorFlow-Lite
一、说明 在这篇文章中,我们将展示如何构建计算机视觉模型并准备将其部署在移动和嵌入式设备上。有了这些知识,您就可以真正将脚本部署到日常使用或移动应用程序中。 教程概述: 介绍在 TensorFlow 中构建模型将模型转换为 TensorFlow Lite训练…...
Java基础--阳光总在风雨后,请相信彩虹
1、今日任务 JAVA SE-韩顺平视频教程–30p以上(今天得50p以上因为是基础)计算机基础八股记忆总结刷题(两题)可以先用python 1、SSM ssm->Spring(轻量级的文本开发框架)/SpringMVC(分层的w…...

高级网络调试技巧:使用Charles Proxy捕获和修改HTTP/HTTPS请求
今天我将与大家分享一种强大的网络调试技巧,那就是使用Charles Proxy来捕获和修改HTTP/HTTPS请求。如果您是一位开发人员或者网络调试爱好者,那么这个工具肯定对您有着很大的帮助。接下来,让我们一起来学习如何使用Charles Proxy进行高级网络…...

Discuz大气游戏风格模板/仿lol英雄联盟游戏DZ游戏模板GBK
Discuz大气游戏风格模板,lol英雄联盟游戏模板,DZ游戏娱乐模板GBK。模板名称:lol英雄联盟游戏(m0398_lol) 下载地址:https://bbs.csdn.net/topics/617408069...
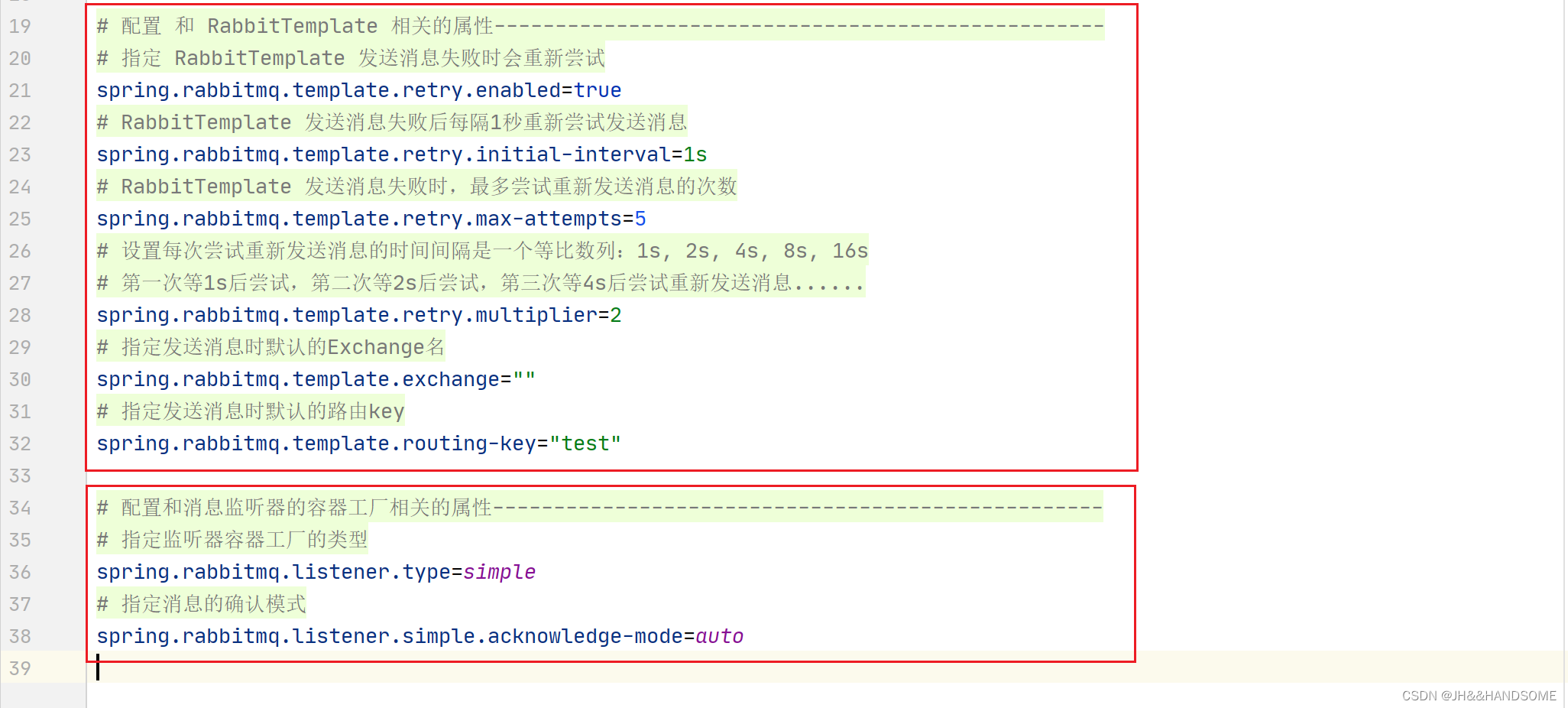
206、SpringBoot 整合 RabbitMQ 的自动配置类 和 对应的属性处理类 的知识点
目录 ★ Spring Boot 为 RabbitMQ 提供的自动配置▲ 自动配置类:RabbitAutoConfiguration▲ 属性处理类:RabbitProperties相关配置 ★ AmqpAdmin的方法★ AmqpTemplate的方法代码演示创建一个springboot的项目。application.properties 配置属性 ★ Spri…...

网络链接失败怀疑是服务器处于非正常状态?如何用本地电脑查看服务器是否正常?
网络链接失败怀疑是服务器处于非正常状态?如何用本地电脑查看服务器是否正常? 网页会出现链接失败,可以实时用cdm大法,cdm可以更好的排查字节数据的返回,可以让我们更好的要检查服务器是否处于正常状态,接下…...

文件操作(打开关闭文件、文件顺序以及随机读写)
文章目录 写在前面1. 文件的打开与关闭1.1 文件指针1.2 文件的打开(fopen)与关闭(fclose)1.2.1 fopen函数1.2.2 fclose函数 2. 文件的顺序读写2.1. fgetc 和 fputc函数2.1.1 fputc函数2.1.2 fgetc函数 2.2 fgets 和 fputs函数2.2.1 fputs函数2.2.2 fgets函数 2.3 fscanf和fprin…...
HTTP 响应头 X-Frame-Options
简介 X-Frame-Options HTTP 响应头用来给浏览器一个指示。该指示的作用为:是否允许页面在 <frame>, </iframe> 或者 <object> 中展现。 网站可以使用此功能,来确保自己网站的内容没有被嵌套到别人的网站中去,也从而避免了…...
MongoDB 集群配置
一、副本集 Replica Sets 1.1 简介 MongoDB 中的副本集(Replica Set)是一组维护相同数据集的 mongod 服务。 副本集可提供冗余和高可用性,是所有生产部署的基础。 也可以说,副本集类似于有自动故障恢复功能的主从集群。通俗的讲就…...

random生成随机数的灵活运用
random返回的 [0,1) 之间的一个随即小数 思考:请写出获取 a-b 之间的一个随机整数,a,b均为整数,比如 a2 , b7 即返回一个数 x > [2,7]Math.random()*(b-a) 返回的就是 [0,b-a](int)(aMath.random()*(b-a1)) 》 (int)(2Math.random()*6) Ma…...

告别命令行:5分钟掌握ffmpegGUI视频处理新方式
告别命令行:5分钟掌握ffmpegGUI视频处理新方式 【免费下载链接】ffmpegGUI ffmpeg GUI 项目地址: https://gitcode.com/gh_mirrors/ff/ffmpegGUI ffmpegGUI是一款创新的跨平台视频处理工具,它将强大的FFmpeg命令行功能转化为直观的图形界面操作&a…...

【若依】框架:从零构建前后端分离项目实战
1. 环境准备与项目初始化 第一次接触若依框架时,我被它"开箱即用"的特性惊艳到了。这个基于Spring Boot的权限管理系统,前后端分离架构设计得非常清晰。下面我会手把手带你完成环境搭建,过程中遇到的坑也会一并说明。 开发环境需要…...

从零到专业:League Director 让你的英雄联盟回放变成电影级大片
从零到专业:League Director 让你的英雄联盟回放变成电影级大片 【免费下载链接】leaguedirector League Director is a tool for staging and recording videos from League of Legends replays 项目地址: https://gitcode.com/gh_mirrors/le/leaguedirector …...

新手零基础入门:通过快马生成burpsuite超详细安装图解教程
作为一名网络安全新手,第一次接触BurpSuite时确实容易被各种专业术语和复杂的安装步骤吓到。今天我就用最直白的方式,手把手带你完成BurpSuite的安装,让你轻松迈出Web安全测试的第一步。 什么是BurpSuite?为什么需要它࿱…...

快马AI助力:十分钟用Python搭建免费股票行情网站原型
最近想验证一个股票行情网站的原型,但作为独立开发者,从零搭建前后端实在太耗时。尝试用PythonFlask快速实现,结合InsCode(快马)平台的AI辅助功能,居然十分钟就完成了基础框架。记录下关键实现思路: 数据获取层设计 选…...

【flash-attn安装成功却import失败?一个ABI参数引发的‘血案’】
1. 为什么flash-attn安装成功却import失败? 最近在部署Llama2模型时,遇到了一个让人抓狂的问题:明明用pip安装了flash-attn,执行import时却报错提示找不到这个包。更诡异的是,pip list明明显示安装成功了,…...

Phi-4-mini-reasoning 128K上下文应用创新:法律条文交叉引用推理案例
Phi-4-mini-reasoning 128K上下文应用创新:法律条文交叉引用推理案例 1. 模型简介与核心能力 Phi-4-mini-reasoning 是一个轻量级开源模型,专注于高质量推理任务。作为Phi-4模型家族成员,它通过合成数据训练和微调,特别擅长处理…...
)
告别NMS!用RT-DETR在1080Ti上跑出108FPS的实时目标检测(保姆级部署教程)
在1080Ti上实现108FPS的RT-DETR实时目标检测实战指南 当目标检测遇上Transformer架构,一场关于速度与精度的革命正在悄然发生。RT-DETR作为DETR家族的最新成员,不仅继承了端到端集合预测的基因,更通过一系列创新设计突破了实时检测的瓶颈。本…...

DDA直线插补算法在MATLAB中的优化实现与性能分析
1. DDA直线插补算法基础与MATLAB实现 DDA(Digital Differential Analyzer)算法是计算机图形学中最基础的直线生成算法之一,它的核心思想是利用直线的微分方程来递推计算像素点位置。我第一次接触这个算法是在大学计算机图形学课程上ÿ…...

用ZYNQ PS-SPI给Flash测个速:华邦W25Q80在25MHz时钟下的真实读写性能报告
ZYNQ PS-SPI Flash性能深度评测:华邦W25Q80在25MHz时钟下的极限挖掘 当我们需要在嵌入式系统中选择一款Flash存储器时,数据手册上的理论参数往往无法反映真实应用场景下的性能表现。本文将基于Xilinx ZYNQ平台的PS-SPI接口,对华邦W25Q80 Flas…...