ROS-6.参数的使用
参数的使用
- 参数服务结构
- 命令行的使用方式
- 运行小海龟
- 命令介绍
- 查看参数
- 获取参数值
- 设置参数
- 保存参数到文件
- 从文件导入参数
- 通过程序操作
- 创建节点
- 修改cmake
- 编译
- 运行
参数服务结构
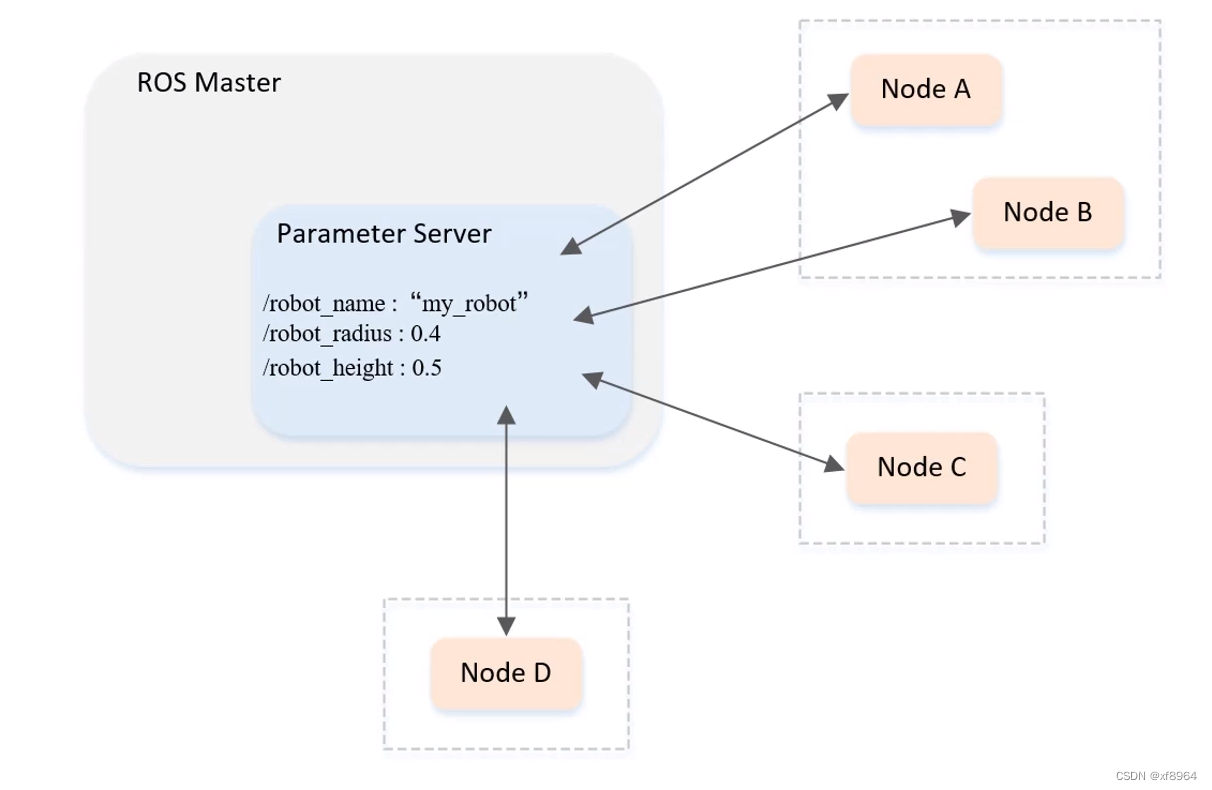
ros中存在参数服务管理服务,管理这所有参数,所有节点剋订阅和发布这些节点
命令行的使用方式
运行小海龟
roscore
rosrun turtlesim turtlesim_node
命令介绍
| 命令 | 功能 |
|---|---|
| rosparam get | 获取参数 |
| rosparam load | 从文件加载参数 |
| rosparam dump | 保存参数到文件 |
| rosparam delete | 删除一个参数 |
| rosparam list | 列举所有参数 |
查看参数
rosparam list
输出如下,参数
/rosdistro
/roslaunch/uris/host_wxf_virtual_machine__44045
/rosversion
/run_id
/turtlesim/background_b
/turtlesim/background_g
/turtlesim/background_r
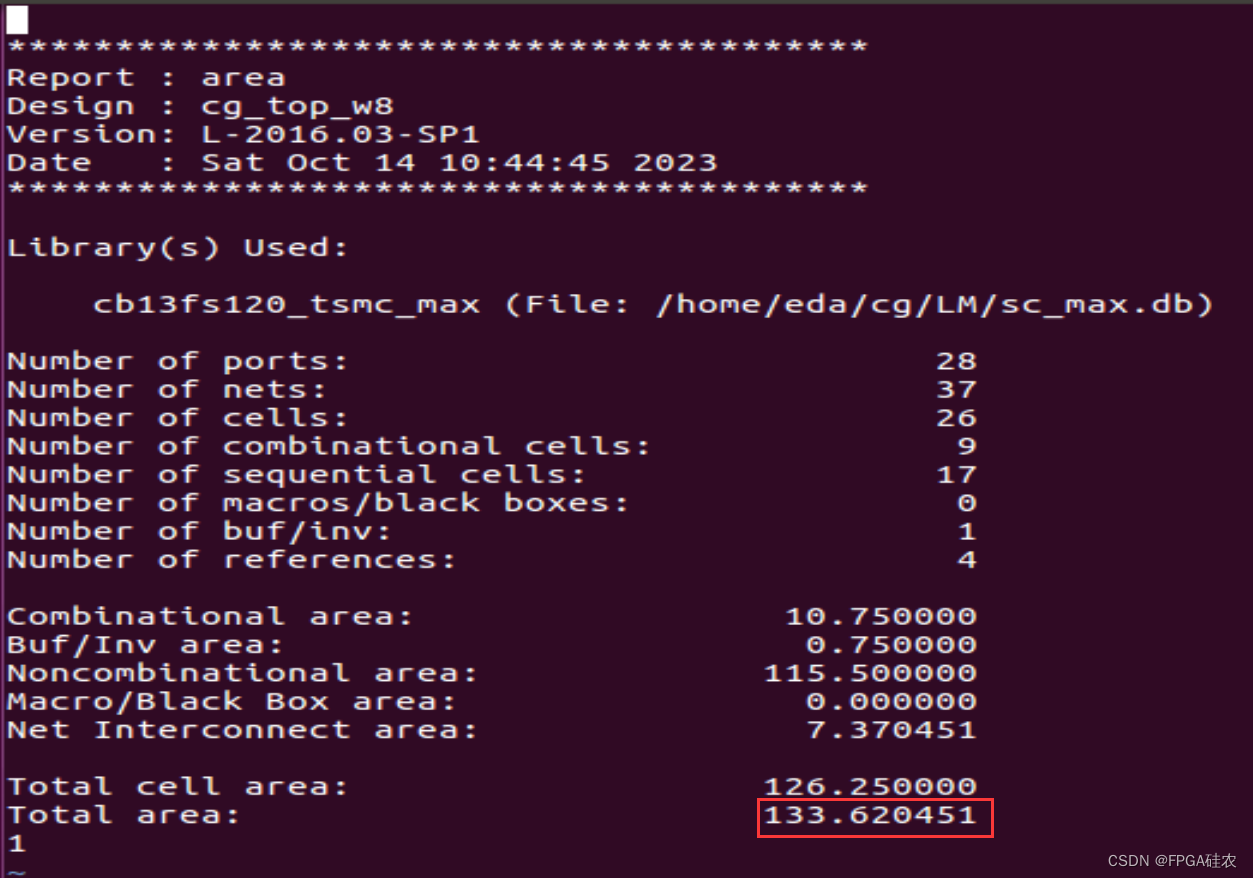
获取参数值
rosparam get /turtlesim/background_b
输出为背景颜色B通道的值为255
设置参数
rosparam set /turtlesim/background_b 100
重新获取参数,就是修改后的值,这时已经设置生成,但是仿真器还未生效,我们需要执行以下命令,
rosservice call /clear "{}"
这时候仿真器终端背景颜色就会生效
保存参数到文件
rosparam dump param.yaml
从文件导入参数
当对配置文件修改后,可以从配置文件导入参数
rosparam load param.yaml
通过程序操作
创建节点
cd catkin_ws/src
catkin_create_pkg learning_parameter roscpp rospy std_srvs
#include <ros/ros.h>
#include <std_srvs/Empty.h>int main(int argc, char **argv)
{int red;int green;int blue;ros::init(argc, argv, "Parameter_config");ros::NodeHandle node;// 获取背景颜色ros::param::get("/turtlesim/background_r", red);ros::param::get("/turtlesim/background_g", green);ros::param::get("/turtlesim/background_b", blue);ROS_INFO("get background color[%d, %d, %d]", red, green, blue);// 设置背景颜色ros::param::set("/turtlesim/background_r", 255);ros::param::set("/turtlesim/background_g", 255);ros::param::set("/turtlesim/background_b", 255);ROS_INFO("get background color[255, 255, 255]");// 重新获取背景颜色ros::param::get("/turtlesim/background_r", red);ros::param::get("/turtlesim/background_g", green);ros::param::get("/turtlesim/background_b", blue);ROS_INFO("get background color[%d, %d, %d]", red, green, blue);// 调用服务,刷新背景颜色ros::service::waitForService("/clear");ros::ServiceClient clear_background = node.serviceClient<std_srvs::Empty>("/clear");std_srvs::Empty srv;clear_background.call(srv);sleep(1);return 0;
}
修改cmake
catkin_ws/src/learning_parameter/CMakeLists.txt
添加如下内容
add_executable(parameter_config src/parameter_config.cpp)
target_link_libraries(parameter_config${catkin_LIBRARIES}
)编译
cd catkin_ws
catkin_make
运行
source devel/setup.sh
roscore
rosrun turtlesim turtlesim_node
rosrun learning_parameter parameter_config
相关文章:
ROS-6.参数的使用
参数的使用 参数服务结构命令行的使用方式运行小海龟命令介绍查看参数获取参数值设置参数保存参数到文件从文件导入参数 通过程序操作创建节点修改cmake编译运行 参数服务结构 ros中存在参数服务管理服务,管理这所有参数,所有节点剋订阅和发布这些节点 …...

机器视觉在自动驾驶汽车中的应用与挑战
机器视觉在自动驾驶汽车中扮演着至关重要的角色,它使车辆能够感知和理解周围环境,以便自主驾驶。以下是机器视觉在自动驾驶汽车中的应用以及相关挑战: 应用: 障碍物检测与避让: 机器视觉系统可以检测和识别路上的障碍…...
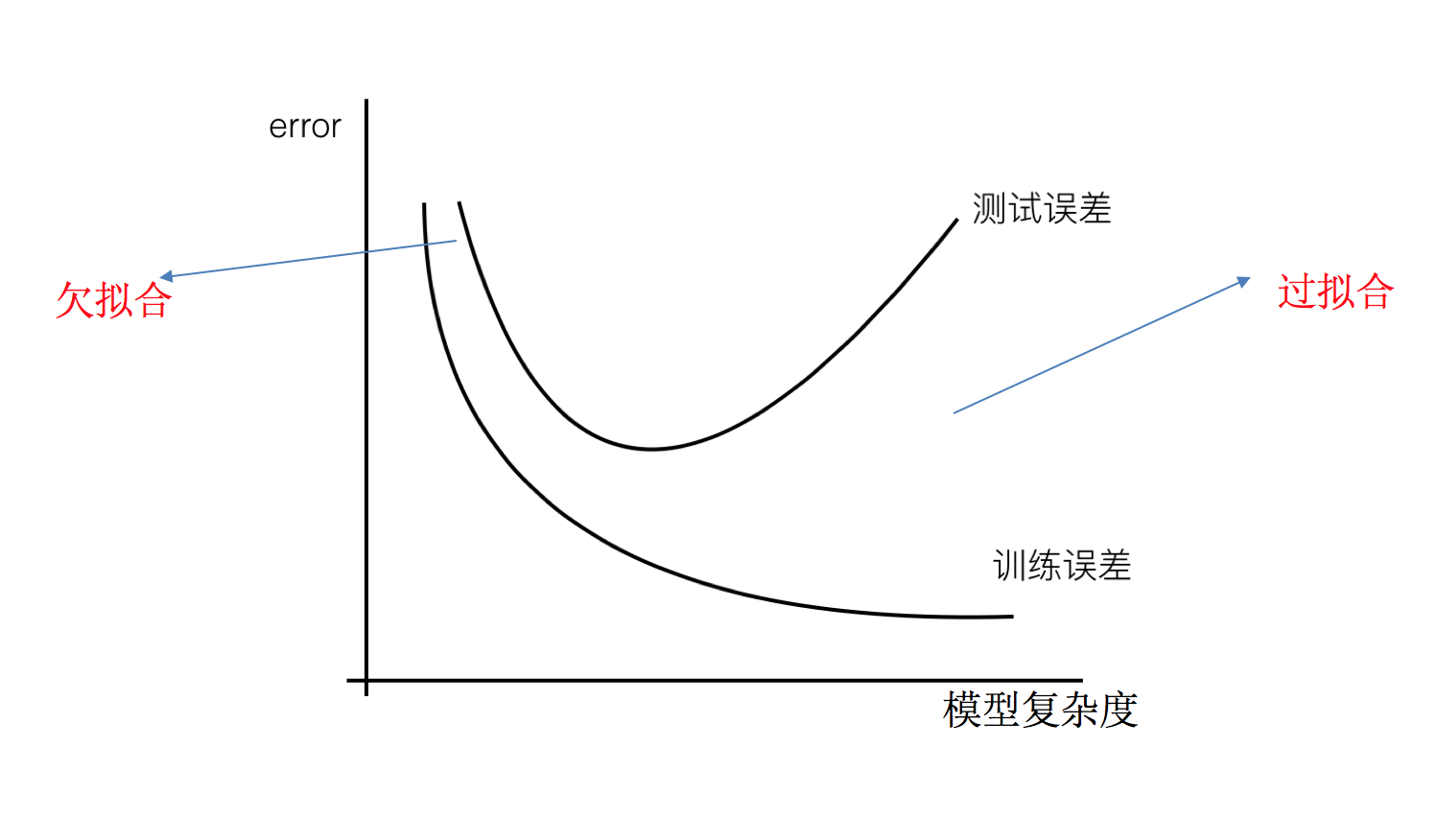
欠拟合、过拟合及优化:岭回归
问题:训练数据训练的很好啊,误差也不大,为什么在测试集上面有问题呢? 当算法在某个数据集当中出现这种情况,可能就出现了过拟合现象。 1、 什么是过拟合与欠拟合 欠拟合 过拟合 分析 第一种情况:因为机器学习到的天鹅特征太少了,导致区分标准太粗糙,不能准确识别出天鹅…...
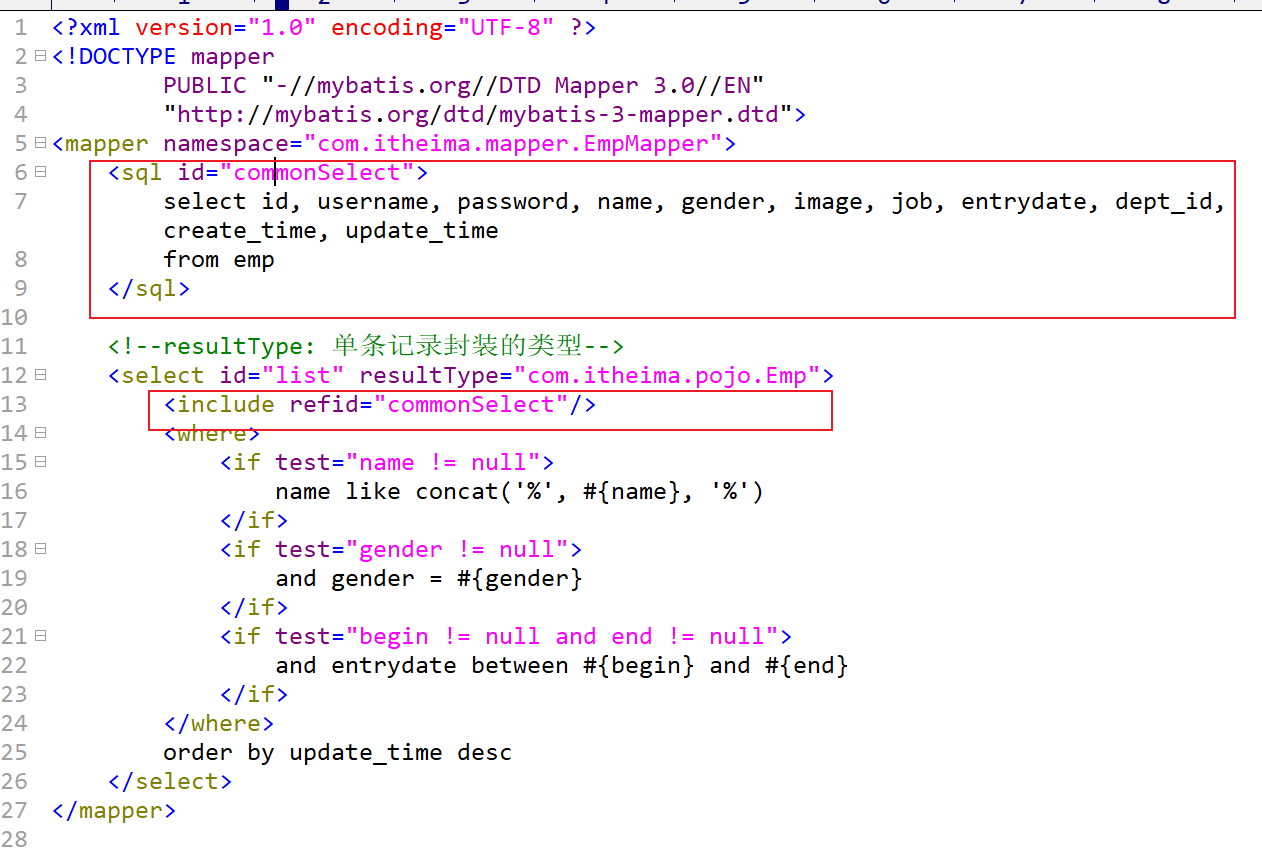
Mybatis学习笔记注解/xml映射/动态SQL%%%Mybatis教程
介绍 Mybatis 是一款优秀的持久层框架,用于简化 JDBC 的开发 MyBatis中文网 Mybatis 入门 快速入门 步骤 创建 SpringBoot 工程、数据库表 user、实体类 User引入 Mybatis 相关依赖,配置 Mybatis(数据库连接信息)编写 SQL 语…...
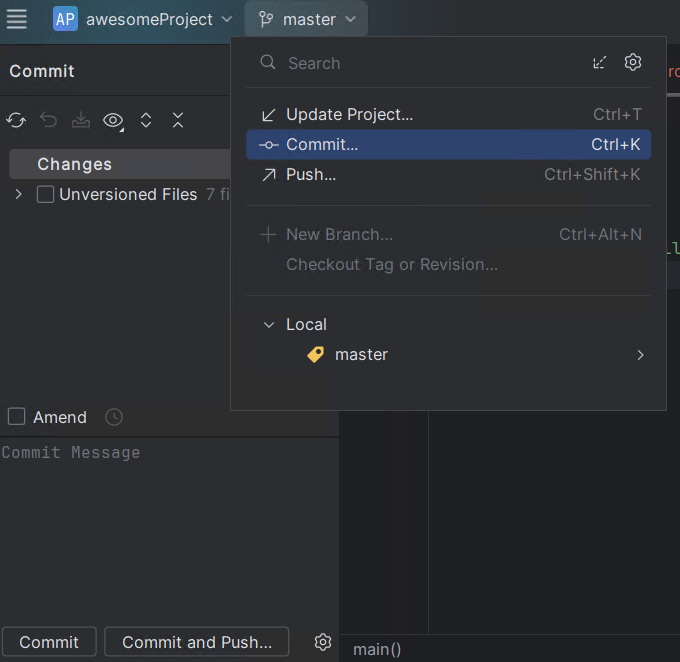
Git纯操作版 项目添加和提交、SSH keys添加、远程仓库控制、冲突解决、IDEA连接使用
Git 文章目录 Git项目简单克隆通用操作添加和提交回滚分支变基分支优选 远程项目推送认证抓取、拉取和冲突解决 IEDA类软件连接 最近学原理学的快头秃了,特此想出点不讲原理的纯操作版,不过还是放个图吧 项目简单克隆 git在本人日常中最重要的功能还是…...

使用OpenSSL生成自签证书
什么是OpenSSL OpenSSL是一个开源的软件库和工具套件,用于安全地处理网络数据传输中的加密、解密、安全套接层(SSL)以及传输层安全(TLS)协议等功能。它广泛应用于网站和互联网服务中,以确保数据传输的安全…...

Spring源码解析——Spring事务是怎么通过AOP实现的?
正文 此篇文章需要有SpringAOP基础,知道AOP底层原理可以更好的理解Spring的事务处理。最全面的Java面试网站 自定义标签 对于Spring中事务功能的代码分析,我们首先从配置文件开始人手,在配置文件中有这样一个配置:<tx:annot…...
机器人革命:脑洞大开的前沿机器人技术!
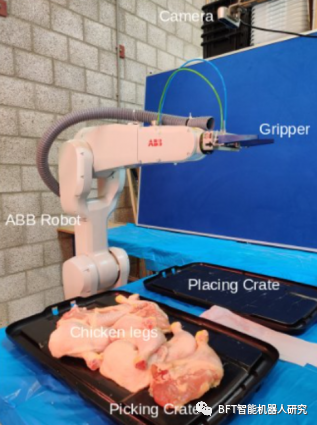
原创 | 文 BFT机器人 01 由生物启发的多模式移动形态机器人 在一个不断运动的世界中,一种新开发的名为M4(多模式移动形态机器人)的机器人展示了在包括滚动、飞行和行走在内的八种不同运动模式之间切换的能力。这款机器人由加州理工学院自主…...

微信小程序动态海报
参考文献: 微信小程序生成分享海报(附带二维码生成) - 简书 需求背景: 微信小程序固定图片,无法自动链接,分享页面内容 解决方案: 拆分海报内容,由以下几个组成 1、用户图像 …...

手写单例模式
一、单例模式的定义 定义: 确保一个类只有一个实例,并提供该实例的全局访问点。 这样做的好处是:有些实例,全局只需要一个就够了,使用单例模式就可以避免一个全局使用的类,频繁的创建与销毁,耗…...
介绍6种解决电脑找不到vcomp140.dll,无法继续执行代码的方法。
在编程和软件开发领域,我们经常会遇到各种错误和问题。其中,找不到vcomp140.dll文件导致无法继续执行代码是一个非常常见的问题。这个问题可能会影响到软件的正常运行,甚至导致整个项目延期。因此,我们需要找到解决方案来解决这个…...

mysql数据物理迁移
文章目录 一、mysql数据物理迁移1.1 物理迁移 一、mysql数据物理迁移 1.1 物理迁移 速度快,需要停机 进入数据库,查看数据存放位置: select datadir; 一般默认存放在/var/lib/mysql 停机数据库,防止有写入数据 systemctl stop …...
构建图像金字塔:探索 OpenCV 的尺度变换技术
构建图像金字塔:探索 OpenCV 的尺度变换技术 引言什么是图像金字塔?为什么需要图像金字塔?构建高斯金字塔构建拉普拉斯金字塔图像金字塔的应用示例:在不同尺度下检测图像中的边缘 结论 引言 在计算机视觉领域,图像金字…...

ios app开发环境搭建
Xcode是Apple iOS的应用市场app store移动应用的开发工具,支持不同设备、不同应用场景的开发,本文主要描述xcode开发工具开发环境的搭建。 如上所示,在macos中,使用app store安装xcode开发工具 如上所示,在macos中&…...
mysql面试题45:读写分离常见方案、哪些中间件可以实现读写分离
该文章专注于面试,面试只要回答关键点即可,不需要对框架有非常深入的回答,如果你想应付面试,是足够了,抓住关键点 面试官:说一说你知道的读写分离常见方案 读写分离是一种常见的数据库架构方案,旨在分担数据库的读写压力,提高系统的性能和可扩展性。以下是两种常见的…...
【数字IC设计】DC自动添加门控时钟
简介 数字电路的动态功耗主要是由于寄存器翻转带来的,为了降低芯片内部功耗,门控时钟的方案应运而生。作为低功耗设计的一种方法,门控时钟是指在数据无效时将寄存器的时钟关闭,以此来降低动态功耗。 在下图中,展示了…...
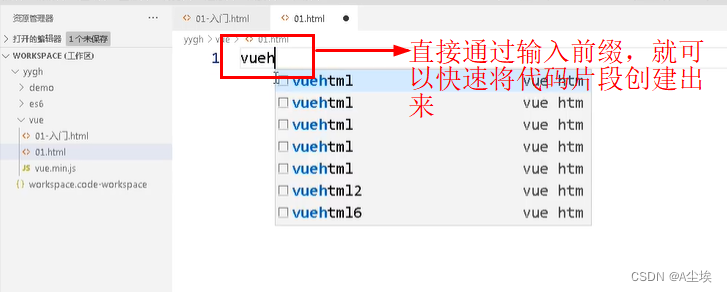
前端开发工具vscode
一、下载安装 https://code.visualstudio.com/ 二、安装插件 三、使用 ①、创建一个空目录 ②、利用vscode工具打开该目录 ③、将该目录设置为工作区 在工作区中添加文件,还可以进行浏览器访问(提前安装了Live Server插件) 为工具…...
网络基础2(1)
HTTP 1.应用层协议2.send和recv单独使用不安全3.URL4.urlencode和urldecode5.HTTP协议格式6.HTTP中的常见请求方法POST&&GET7.HTTP的状态码8.HTTP常见Header 🌟🌟hello,各位读者大大们你们好呀🌟🌟 Ƕ…...

系统文件IO、文件描述符fd、重定向、文件系统、动态库和静态库
目录 C文件接口系统文件I/O系统调用和库函数文件描述符0 & 1 & 2FILE和fd的关系文件描述符的分配规则 重定向重定向的本质输出重定向输入重定向追加重定向 dup2函数 FILE理解文件系统了解磁盘的物理结构逻辑抽象文件系统文件系统的图解和解析通过文件系统来理解ls -al通…...

一、K8S第一步搭建
一、初始化操作 1.1、关闭防火墙 systemctl stop firewalld systemctl disable firewalld关闭交换空间 swapoff -a # 临时 sed -ri s/.*swap.*/#&/ /etc/fstab # 永久重启才能生效 根据规划设置主机名 hostnamectl set-hostname <hostname>映射主机 cat >>…...
)
别再死磕Release了!用Debug模式打包Qt exe,一次搞定所有dll依赖(附GPT脚本生成技巧)
用Debug模式打包Qt应用:绕过Release陷阱的高效解决方案 当Qt开发者第一次尝试将项目打包成可独立运行的exe文件时,绝大多数教程都会推荐使用Release模式编译。然而在实际操作中,Release模式可能会带来一系列难以排查的问题——从莫名其妙的崩…...
Linux 输入子系统实战教程 —— 02设备信息查询 + 输入事件读取(阻塞 / 非阻塞模式))
(新手)Linux 输入子系统实战教程 —— 02设备信息查询 + 输入事件读取(阻塞 / 非阻塞模式)
Linux 输入子系统实战教程 —— 设备信息查询 输入事件读取(阻塞 / 非阻塞模式)完整学习文档本文档基于Linux 输入设备事件读取程序编写,包含完整注释源码、核心原理、逐模块解析、真实实验现象、错误原因分析,专为嵌入式 Linux …...

松江少儿英语口碑好的?
松江少儿英语口碑好的 环球乐学少儿英语,指出幼儿英语学习三大痛点: 1. 兴趣不足易抵触:教学形式枯燥,多以机械记单词、跟读为主,不符合幼儿认知特点,易产生厌学情绪。 2. 缺语境不会运用:…...

全民拼购的“低门槛+全权益”,到底戳中了商业的哪个命门
一、先给全民拼购画个像:不是“割韭菜”,是“普惠式信任游戏”老陈一开始也怕:“拼购不都是‘砍一刀免费拿’‘拉3人返现’吗?我可不想踩红线。”我跟他说:新型全民拼购和传统拼购的本质区别,是“从‘赚快钱…...

深入解析MCU Systick:从基础配置到精准延时与系统时间获取实战
1. Systick定时器基础解析 Systick是Cortex-M内核内置的24位递减计数器,堪称MCU的"心跳发生器"。我第一次在STM32项目中使用它时,就像发现了一个隐藏的瑞士军刀——简单却功能强大。这个看似简单的定时器,实际上承担着三大核心功能…...

除了浏览器点一点,Oracle 19c EM Express还能这么用?几个提升DBA效率的隐藏技巧
Oracle 19c EM Express高阶应用:解锁DBA效率提升的五大隐藏技巧 当你已经能够熟练地通过浏览器访问Oracle 19c EM Express时,是否思考过这个轻量级管理工具还能为你带来哪些惊喜?本文将带你超越基础操作,探索那些被大多数DBA忽略的…...

uni-app实战:驰腾打印机蓝牙对接与二维码打印全解析
1. 为什么选择uni-app对接驰腾打印机? 在移动开发领域,跨平台解决方案越来越受到开发者青睐。uni-app作为一款基于Vue.js的跨平台框架,可以一次开发同时发布到iOS、Android以及各种小程序平台。这种特性使得它成为对接硬件设备的理想选择&am…...

RevokeMsgPatcher深度解析:二进制补丁技术如何永久保存即时通讯消息
RevokeMsgPatcher深度解析:二进制补丁技术如何永久保存即时通讯消息 【免费下载链接】RevokeMsgPatcher :trollface: A hex editor for WeChat/QQ/TIM - PC版微信/QQ/TIM防撤回补丁(我已经看到了,撤回也没用了) 项目地址: https…...

高效智能歌词提取工具:跨平台音乐歌词获取解决方案
高效智能歌词提取工具:跨平台音乐歌词获取解决方案 【免费下载链接】163MusicLyrics Windows 云音乐歌词获取【网易云、QQ音乐】 项目地址: https://gitcode.com/GitHub_Trending/16/163MusicLyrics 在数字音乐时代,我们常常遇到想要学唱一首外语…...

【VS2015_MFC_OPENCV_摄像头控制实例教程】
【VS2015_MFC_OPENCV_摄像头控制实例教程】 一、功能实现目标 能够本地、远程控制摄像头的启动和关闭; 能够显示摄像头的拍摄的图像信息; 能够截图,并保存到电脑指定的路径文件中; 二、功能实现步骤 1、搭建界面 (1)新建工程项目基于对话框的MFC (2)在对话框“工具箱…...