四.镜头知识之放大倍率
四.镜头知识之放大倍率
文章目录
- 四.镜头知识之放大倍率
- 4.0 前言
- 4.1 镜头的光学放大倍率的计算方法
- 4.2 显示器的电子放大倍率
- 4.2.1 智能硬件产品的显示放大倍率计算案例
- 4.3 系统放大倍率
- 4.4 智能硬件产品的系统放大倍率计算案例
- 4.4 智能硬件产品的系统放大倍率计算案例
4.0 前言
镜头的参数的时候都会看到一个数值叫做放大倍率。
例如用一支100mm焦段放大倍率为1:1的微距镜头在100mm焦段、能清晰成像的最短拍摄距离进行拍摄,拍摄一个10mm的东西, 在35mm胶片也就是全画幅相机上,全画幅的斜线长度为43.3mm,如果照片最终印成斜线长度为43.3mm的照片,那么这个东西在里面就应该是10mm。
同理如果用的是一只60mm焦段放大倍率为2:1的微距镜头在60mm焦段、能清晰成像的最短拍摄距离进行拍摄,拍摄一个10mm的东西, 在35mm胶片也就是全画幅相机上拍照,如果照片最终印成斜线长度为43.3mm的照片,那么这个东西在里面就应该是20mm大小,这就是这枚镜头
相关文章:

四.镜头知识之放大倍率
四.镜头知识之放大倍率 文章目录 四.镜头知识之放大倍率4.0 前言4.1 镜头的光学放大倍率的计算方法4.2 显示器的电子放大倍率4.2.1 智能硬件产品的显示放大倍率计算案例4.3 系统放大倍率4.4 智能硬件产品的系统放大倍率计算案例4.4 智能硬件产品的系统放大倍率计算案例4.0 前言…...

Jenkins UI 自动化持续化集成测试
一:安装jenkins 环境 在官网下载msi 直接安装即可 二:设置全局变量 设置allure 路径 三:创建项目 1、创建自由风格项目 2、如果项目在本地,且本地服务器是windows ,找到Jenkins安装根目录,寻找config…...

vue项目中引入地图的详细教程
第一步:在项目中安装地图插件 npm i amap/amap-jsapi-loader --save 第二步:创建一个容器 添加id属性 (因为地图必须使用id 不能使用class) <div id"maps"></div> 第三步:给这个容器设置宽…...

MyBatisPlus 多数据源配置
目录 一、mybatis-plus 简介 特性 二、支持数据库: 三、 开发实例 1. 引入依赖: 2. 参数配置application.yml 3. 在 Spring Boot 启动类中添加 MapperScan 注解,扫描 Mapper 文件夹: 4. 编写实体类 User.java(此处…...

使用Golang实现HTTP代理突破IP访问限制
引言 在当今互联网时代,网站和服务商为了维护安全性和保护用户隐私,常常会对特定的IP地址进行封锁或限制。但是,有时候我们可能需要访问这些被限制的网站或服务。为了突破这种限制,我们可以使用HTTP代理来隐藏真实的客户端IP地址…...

Iterator和ListIterator的区别是什么?
Iterator 和 ListIterator 都是 Java 集合框架中的迭代器,其中 Iterator 是普遍适用于所有实现了 Iterable 接口的集合类的通用迭代器,而 ListIterator 则是专门用于遍历 List 集合的迭代器,它比 Iterator 更加强大,而且只适用于 List 集合。 以下是 Iterator 和 ListItera…...
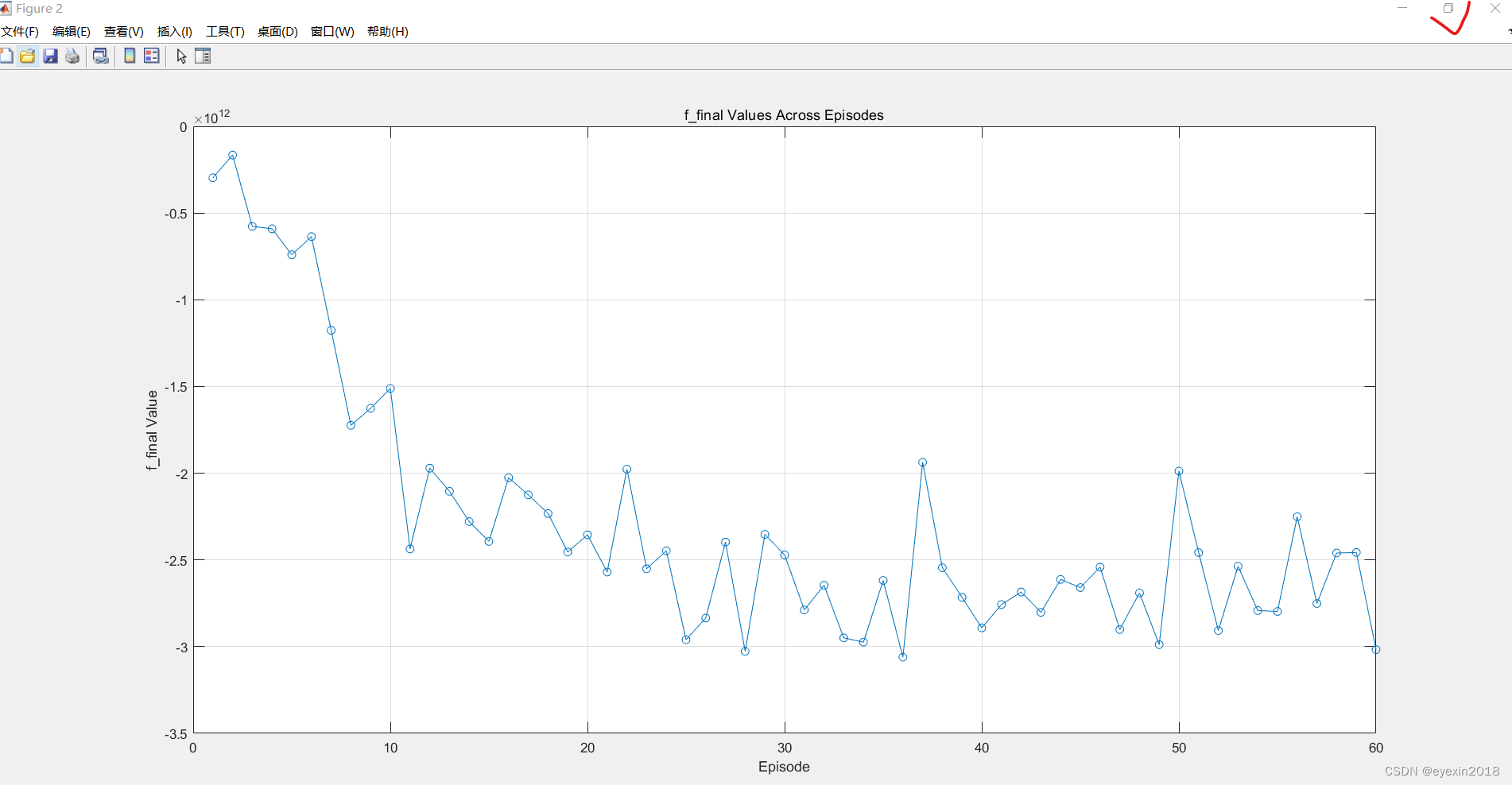
大坑-MATLAB图片转存时需注意的点
MATLAB中图片的保存和转存有一个巨大的陷阱,我也是在吃了大亏后发现的,正常情况下,MATLAB跑完实验,生成的图片如下 放大后这样 可以方便修改坐标轴标题,最初我就是因为想修改坐标轴标题才给它放大的,因为…...
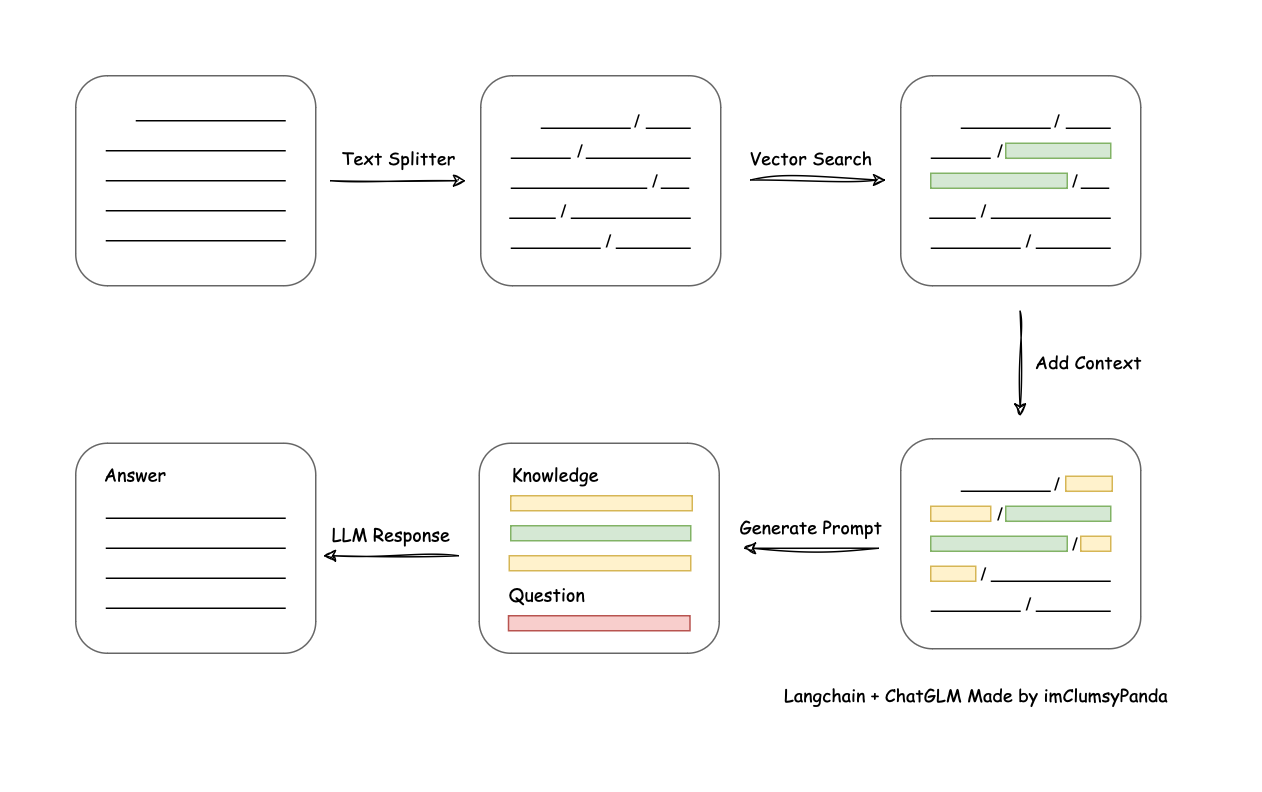
基于Lang-Chain(ChatGLM和ChatChat)知识库大语言模型的部署搭建
环境准备 阿里云个人认证后,可免费试用机器学习平台PAI,可提供适合大语言模型环境搭建的高配置服务器。 点击试用阿里云服务器 试用产品选择:选择交互式建模PAI-DSW 适合哪些场景 文章/知识库/帮助文档等的检索基于现有知识库实现问答… …...
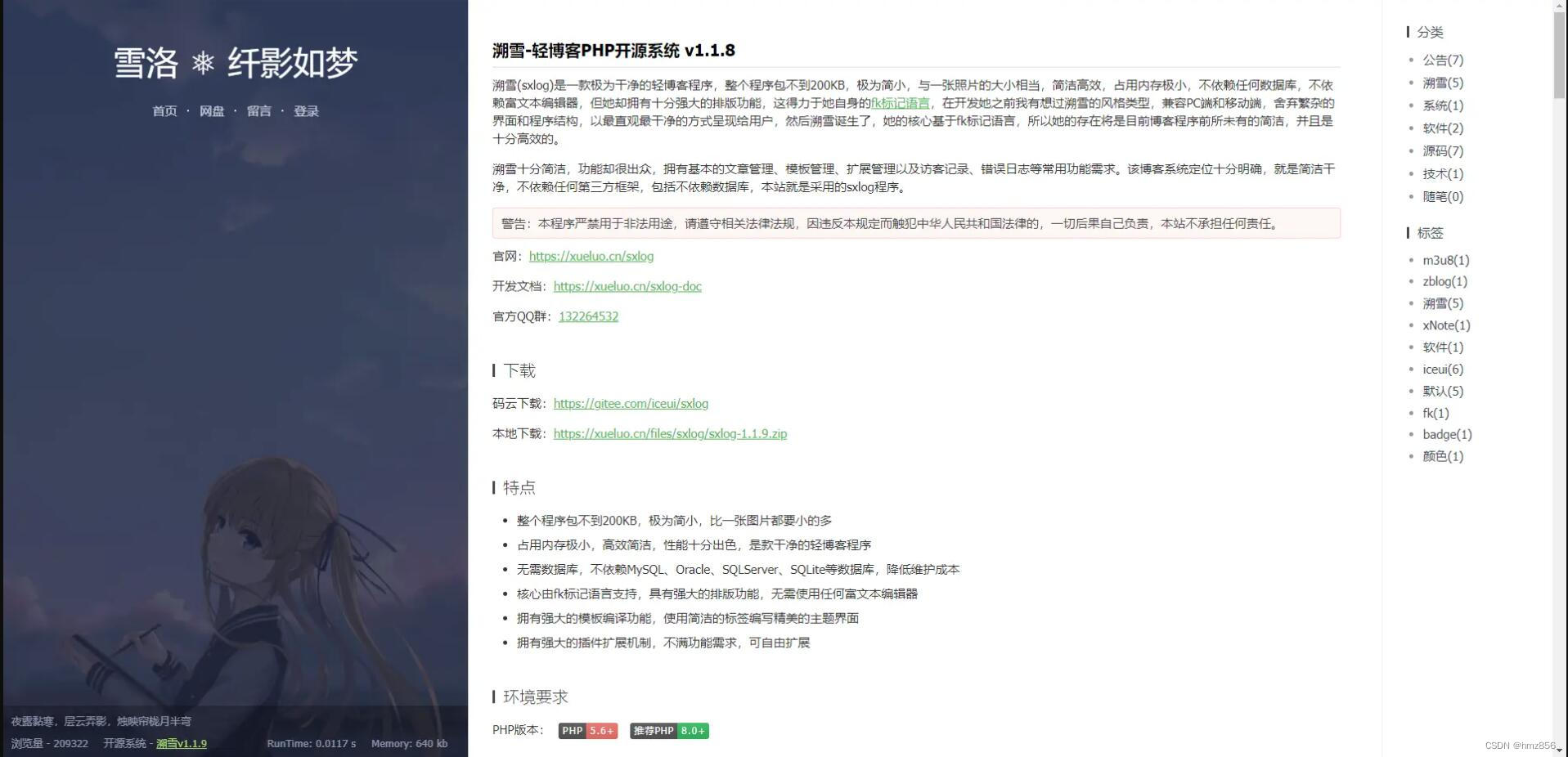
个人轻博客PHP开源系统/溯雪Sxlog轻博客源码/洁干净轻/占内存极低/php源码
源码简介: 溯雪(sxlog)它是一款很简洁越低内存的轻博客程序,整个程序包不到200KB,占内存极小,比一张照片都要小很多。简洁高效,占用空间内存极小,而且它不依赖任何数据库,不依赖富文本编辑器&a…...
2.Vue-从零开始搭建一个vue项目
题记 从零开始搭建一个vue项目,以下是操作的全过程。 安装Vue CLI脚手架 打开终端,运行以下命令全局安装Vue CLI脚手架: npm install -g vue/cli 查看 Vue CLI脚手架版本: vue -V 注意:查看vue版本的命令不是vue -V&a…...
快速构建代理应对
今天我要和大家分享一个解决反爬策略升级问题的方法,那就是快速构建代理池。如果您是一位爬虫开发人员,一定深知反爬策略的烦恼。但是,通过构建代理池,您可以轻松地应对反爬策略的升级,让您的爬虫持续高效运行。接下来…...
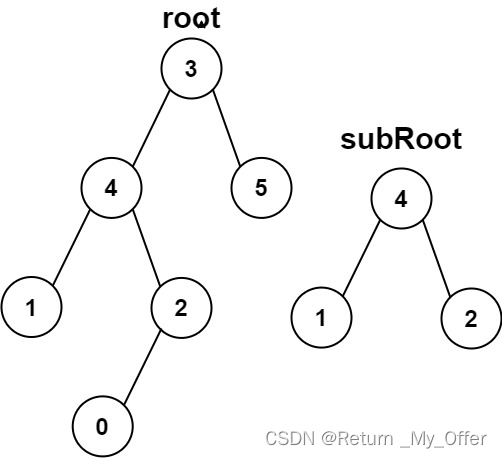
【LeetCode刷题(数据结构)】:另一颗树的子树
给你两棵二叉树 root 和 subRoot 检验 root 中是否包含和 subRoot 具有相同结构和节点值的子树。如果存在,返回 true ;否则,返回 false 二叉树 tree 的一棵子树包括 tree 的某个节点和这个节点的所有后代节点。tree 也可以看做它自身的一棵子…...

LeetCode 2903. 找出满足差值条件的下标 I【双指针+维护最大最小】简单
本文属于「征服LeetCode」系列文章之一,这一系列正式开始于2021/08/12。由于LeetCode上部分题目有锁,本系列将至少持续到刷完所有无锁题之日为止;由于LeetCode还在不断地创建新题,本系列的终止日期可能是永远。在这一系列刷题文章…...

【神经网络】如何在Pytorch中从零开始将MNIST网络量化为8位
论文: Quantization and Training of Neural Networks for Efficient Integer-Arithmetic-Only Inference 下载地址:https://arxiv.org/pdf/1712.05877.pdf 更新:量化感知训练的博客文章是在线的,并在这里链接,通过它我们可以训…...

智慧水利:山海鲸数字孪生的革新之路
一、概念 什么是港口? "港口"通常指的是一个水域或岸边的设施,用于装载、卸载、储存和处理货物、以及提供与海上、河流或湖泊交通相关的服务。港口可以包括各种类型的码头、码头设备、仓库、货物运输设施、以及各种管理和物流设施。 什么是数…...

【unity】【VR】白马VR课堂系列-VR开发核心基础04-主体设置-XR Rig的引入和设置
接下来我们开始引入并构建XR Rig。 你可以将XR Rig理解为玩家在VR世界中的替身。 我们先删除Main Camera,在Hierarchy右键点击删除。 然后再在场景层右键选择XR下的XR Origin。这时一个XR Origin对象就被添加到了Hierarchy。 重设XR Origin的Position和Rotation…...
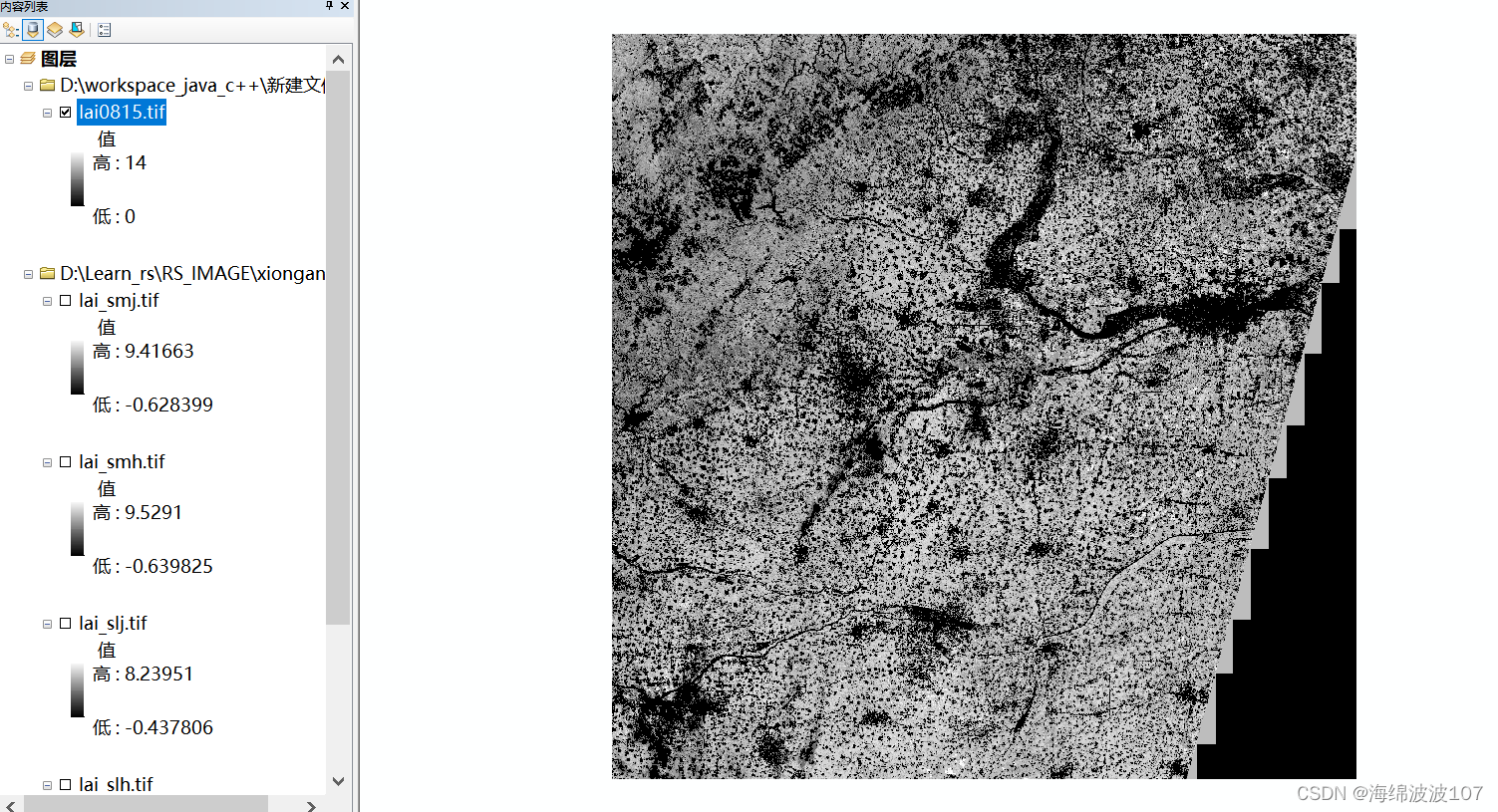
Arcgis实现Tiff合并
Arcgis实现Tiff合并 现有四幅Tiff影像 打开数据管理工具 输入使用这四幅影像 下面这个就是建立数据库,这个不对 点击确定 合成完毕...

将已有jar包放进maven仓库
mvn install:install-file -DfileD:\sapjco3.jar -DgroupIdcom.sap.conn.jco -DartifactIdsapjco3 -Dversion3.0.14 -Dpackagingjar...
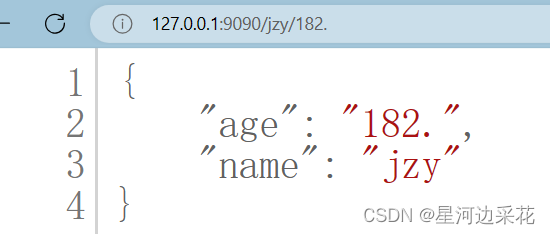
从0开始学go第八天
gin获取URL路径参数 package main//获取path(URL)参数 import ("net/http""github.com/gin-gonic/gin" )func main() {r : gin.Default()r.GET("/:name/:age", func(c *gin.Context) {//获取路径参数name : c.Param(&quo…...
centos7为例进行数据盘挂载详解
以centos7为例进行数据盘挂载的操作演示,挂载一个200G盘 1、切换至root用户 z 2、查看要挂载的硬盘 执行sfdisk -s 或 fdisk -l可以看到有一个200G。 sfdisk -s fdisk -l 需要挂载200G的这块硬盘。 3、执行lvs查看当前的lvm信息 4、执行pvcreate /dev/sdb创建…...

2026届学术党必备的六大AI论文工具推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 撰写AI毕业论文之时,需一直坚守学术伦理底线,严格禁止直接靠着生成式…...

Simba MCP Server:用AI助手对话式驱动贝叶斯营销组合模型分析
1. 项目概述:当贝叶斯营销组合模型遇上AI助手如果你是一名市场分析师、营销科学家,或者任何需要回答“我的营销预算到底花得值不值”的人,那么你对营销组合模型(MMM)一定不陌生。这玩意儿是量化不同营销渠道࿰…...


多物流机器人任务调度与路径规划【附程序】
✨ 长期致力于物流机器人、任务调度、路径规划、沙猫群算法研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)栅格-拓扑双层地图建模与任务分配…...

编程统计产品售后处理时长,客户满意度数据,优化售后流程,降低客户投诉率,提升企业职场服务口碑。
一、实际应用场景描述在制造、家电、消费电子、SaaS 等行业中,售后服务是客户体验的关键环节,典型流程包括:- 客户提交售后申请(报修、退换货、咨询)- 客服受理 → 技术/维修派单 → 上门/处理 → 完成 → 客户评价- 系…...

Nodejs服务端应用接入Taotoken多模型API指南
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Nodejs服务端应用接入Taotoken多模型API指南 对于Node.js后端开发者而言,将大模型能力集成到Web服务或API中࿰…...

C# 结合 llama.cpp 实现 PaddleOCR-VL-1.5:本地 OCR 客户端开发全攻略
一、前言在日常工作中,我们经常需要从图片中提取文字信息。虽然市面上有不少 OCR 服务,但它们往往需要联网、存在隐私风险,或者需要付费。2026 年百度发布了开源文档解析模型 PaddleOCR-VL-1.5,该模型不仅支持常规文字识别&#x…...

1.8.2 掌握Scala类与对象 - 单例对象与伴生对象
本次实战通过三个案例深入解析了 Scala 中 object 的核心机制,展示了其如何替代 Java 的 static 关键字。首先,通过 MathUtils 定义了存放常量与工具方法的独立单例对象;其次,利用 Person 类与其同名对象演示了“伴生对象”特性&a…...

PyQt5实战:从Designer拖拽到打包exe,手把手打造你的第一个多页面桌面应用
PyQt5实战:从Designer拖拽到打包exe,手把手打造你的第一个多页面桌面应用 在数字化浪潮席卷各行各业的今天,图形用户界面(GUI)开发已成为程序员必备技能之一。而PyQt5作为Python最强大的GUI框架,凭借其丰富…...

Seabay:AI应用开发的一站式工具箱,解决配置、数据、服务化与监控难题
1. 项目概述:Seabay,一个面向AI应用开发的“一站式”工具集最近在GitHub上看到一个挺有意思的项目,叫seapex-ai/seabay。乍一看这个名字,可能会联想到“海贝”或者“海港”,但它的定位其实非常明确:一个为A…...