OpenFOAM: twoPhaseEulerFoam解读
twoPhaseEulerFoam全解读之一(转载)
本系列将对OpenFOAM-2.1.1 中的 twoPhaseEulerFoam 求解器进行完全解读,共分三部分:方程推导,代码解读,补充说明。本篇进行方程推导,详细介绍如果从双流体模型出发得到 twoPhaseEulerFoam 中的 UEqn.H 对应的模型方程形式。
方程推导
双流体模型方程可以表达成如下形式:
连续性方程:
∂ ( α ϕ ρ ϕ ) ∂ t + ∇ ⋅ ( α ϕ ρ ϕ U ϕ ) = 0 \frac{\partial(\alpha_\phi\rho_\phi)}{\partial t}+\nabla\cdot(\alpha_\phi\rho_\phi U_\phi)=0 ∂t∂(αϕρϕ)+∇⋅(αϕρϕUϕ)=0
动量守恒方程:
∂ ( α ϕ ρ ϕ U ϕ ) ∂ t + ∇ ⋅ ( α ϕ ρ ϕ U ϕ U ϕ ) + ∇ ⋅ ( α ϕ τ ϕ ) + ∇ ⋅ ( α ϕ ρ ϕ R ϕ ) = − α ϕ ∇ p + α ϕ ρ ϕ g + M ϕ \frac{\partial(\alpha_\phi\rho_\phi U_\phi)}{\partial t}+\nabla\cdot(\alpha_\phi\rho_\phi U_\phi U_\phi)+\nabla\cdot(\alpha_\phi\tau_\phi)+\nabla\cdot(\alpha_\phi\rho_\phi R_\phi )=-\alpha_\phi\nabla p+\alpha_\phi\rho_\phi g+M_\phi ∂t∂(αϕρϕUϕ)+∇⋅(αϕρϕUϕUϕ)+∇⋅(αϕτϕ)+∇⋅(αϕρϕRϕ)=−αϕ∇p+αϕρϕg+Mϕ
式中,下标 ϕ = a , b \phi=a,b ϕ=a,b分别代表分散相和连续相, τ ϕ \tau_\phi τϕ表示粘性应力项, R ϕ R_\phi Rϕ表示雷诺应力项, M ϕ M_\phi Mϕ表示相间作用项。
上述方程是完全守恒形式的,但是注意到上述动量方程的瞬变项是 ∂ ( α ϕ ρ ϕ U ϕ ) ∂ t \frac{\partial(\alpha_\phi\rho_\phi U_\phi)}{\partial t} ∂t∂(αϕρϕUϕ),等于说解这个方程能得到的是每个时间步的动量,若要转化成速度,则需要用动量除以密度与体积分率的乘积,即 ( α ϕ ρ ϕ U ϕ ) α ϕ ρ ϕ \frac{(\alpha_\phi\rho_\phi U_\phi)}{\alpha_\phi\rho_\phi} αϕρϕ(αϕρϕUϕ)。那么当离散相a的体积分率 α a → 0 \alpha_a\to0 αa→0时,这个除法就要出问题了。于是,Weller [1] 提出通过构造一种”phase-intensive”形式的动量方程来避开这个问题,见下面的详细推导。
Weller提出的方法的核心是将 α ϕ ρ ϕ \alpha_\phi\rho_\phi αϕρϕ从动量方程的瞬变项中剥离出来,以使动量方程直接对速度进行演化,而不是动量。
首先对动量方程的瞬变项和对流项进行如下转化:
∂ ( α ϕ ρ ϕ U ϕ ) ∂ t = α ϕ ρ ϕ ∂ ( U ϕ ) ∂ t + U ϕ ∂ ( α ϕ ρ ϕ ) ∂ t \frac{\partial(\alpha_\phi\rho_\phi U_\phi)}{\partial t}=\alpha_\phi\rho_\phi\frac{\partial( U_\phi)}{\partial t}+U_\phi\frac{\partial(\alpha_\phi\rho_\phi )}{\partial t} ∂t∂(αϕρϕUϕ)=αϕρϕ∂t∂(Uϕ)+Uϕ∂t∂(αϕρϕ)
∇ ⋅ ( α ϕ ρ ϕ U ϕ U ϕ ) = α ϕ ρ ϕ U ϕ ⋅ ∇ ( U ϕ ) + U ϕ ∇ ⋅ ( α ϕ ρ ϕ U ϕ ) \nabla\cdot(\alpha_\phi\rho_\phi U_\phi U_\phi)= \alpha_\phi\rho_\phi U_\phi\cdot \nabla( U_\phi) + U_\phi\nabla\cdot(\alpha_\phi\rho_\phi U_\phi) ∇⋅(αϕρϕUϕUϕ)=αϕρϕUϕ⋅∇(Uϕ)+Uϕ∇⋅(αϕρϕUϕ)
注:这里到了张量运算公式 [ ∇ ⋅ v w ] = [ v ⋅ ∇ w ] + w ( ∇ ⋅ v ) [\nabla\cdot \mathbf{vw}]=[\mathbf{v}\cdot\nabla\mathbf{w}]+\mathbf{w}(\nabla\cdot\mathbf{v}) [∇⋅vw]=[v⋅∇w]+w(∇⋅v),具体可参考 Bird 的 Transport Phenomenon 的 Appendix A。
于是,瞬变项和对流项的加和可以写成如下形式:
∂ ( α ϕ ρ ϕ U ϕ ) ∂ t + ∇ ⋅ ( α ϕ ρ ϕ U ϕ U ϕ ) = α ϕ ρ ϕ [ ∂ ( U ϕ ) ∂ t + U ϕ ⋅ ∇ ( U ϕ ) ] + U ϕ [ ∂ ( α ϕ ρ ϕ ) ∂ t + ∇ ⋅ ( α ϕ ρ ϕ U ϕ ) ] \frac{\partial(\alpha_\phi\rho_\phi U_\phi)}{\partial t}+\nabla\cdot(\alpha_\phi\rho_\phi U_\phi U_\phi)=\alpha_\phi\rho_\phi\left[\frac{\partial( U_\phi)}{\partial t}+U_\phi \cdot \nabla( U_\phi)\right]+U_\phi \left[ \frac{\partial(\alpha_\phi\rho_\phi )}{\partial t}+\nabla\cdot(\alpha_\phi\rho_\phi U_\phi)\right] ∂t∂(αϕρϕUϕ)+∇⋅(αϕρϕUϕUϕ)=αϕρϕ[∂t∂(Uϕ)+Uϕ⋅∇(Uϕ)]+Uϕ[∂t∂(αϕρϕ)+∇⋅(αϕρϕUϕ)]
注意右边第二项的括号里其实就是连续性方程的左边,其值为0,因此得到:
∂ ( α ϕ ρ ϕ U ϕ ) ∂ t + ∇ ⋅ ( α ϕ ρ ϕ U ϕ U ϕ ) = α ϕ ρ ϕ [ ∂ ( U ϕ ) ∂ t + U ϕ ⋅ ∇ ( U ϕ ) ] \frac{\partial(\alpha_\phi\rho_\phi U_\phi)}{\partial t}+\nabla\cdot(\alpha_\phi\rho_\phi U_\phi U_\phi) = \alpha_\phi\rho_\phi\left[\frac{\partial( U_\phi)}{\partial t}+U_\phi \cdot \nabla( U_\phi)\right] ∂t∂(αϕρϕUϕ)+∇⋅(αϕρϕUϕUϕ)=αϕρϕ[∂t∂(Uϕ)+Uϕ⋅∇(Uϕ)]
于是得到第一步转化之后的动量方程:
α ϕ ρ ϕ [ ∂ ( U ϕ ) ∂ t + U ϕ ⋅ ∇ ( U ϕ ) ] + ∇ ⋅ ( α ϕ τ ϕ ) + ∇ ⋅ ( α ϕ ρ ϕ R ϕ ) = − α ϕ ∇ p + α ϕ ρ ϕ g + M ϕ \alpha_\phi\rho_\phi\left[\frac{\partial( U_\phi)}{\partial t}+U_\phi\cdot\nabla( U_\phi)\right] + \nabla\cdot(\alpha_\phi\tau_\phi) + \nabla\cdot(\alpha_\phi\rho_\phi R_\phi ) = -\alpha_\phi\nabla p + \alpha_\phi\rho_\phi g + M_\phi αϕρϕ[∂t∂(Uϕ)+Uϕ⋅∇(Uϕ)]+∇⋅(αϕτϕ)+∇⋅(αϕρϕRϕ)=−αϕ∇p+αϕρϕg+Mϕ
下面处理粘性应力项和雷诺应力项。
∇ ⋅ ( α ϕ τ ϕ ) + ∇ ⋅ ( α ϕ ρ ϕ R ϕ ) = ∇ ⋅ [ α ϕ ρ ϕ ( τ ϕ ρ ϕ + R ϕ ) ] = ∇ ⋅ [ α ϕ ρ ϕ R e f f , ϕ ] \nabla\cdot(\alpha_\phi\tau_\phi) + \nabla\cdot(\alpha_\phi\rho_\phi R_\phi )=\nabla\cdot\left[\alpha_\phi\rho_\phi(\frac{\tau_\phi}{\rho_\phi}+R_\phi)\right] = \nabla\cdot\left[\alpha_\phi\rho_\phi R_{eff,\phi}\right ] ∇⋅(αϕτϕ)+∇⋅(αϕρϕRϕ)=∇⋅[αϕρϕ(ρϕτϕ+Rϕ)]=∇⋅[αϕρϕReff,ϕ]
其中 R e f f , ϕ = τ ϕ ρ ϕ + R ϕ R_{eff,\phi}=\frac{\tau_\phi}{\rho_\phi}+R_\phi Reff,ϕ=ρϕτϕ+Rϕ。
根据定义(此处参考BubbleFoam的Wiki页面):
τ ϕ = − ρ ϕ ν ϕ [ ∇ U ϕ + ∇ T U ϕ ] + 2 3 ρ ϕ ν ϕ ( ∇ ⋅ U ϕ ) I \boldsymbol{\tau}_{\phi} = - \rho_{\phi} \nu_{\phi} \left[\nabla \mathbf{U}_{\phi} + \nabla^{\textrm{T}} \mathbf{U}_{\phi} \right] + \frac{2}{3}\rho_{\phi}\nu_{\phi} \left( \nabla \cdot \mathbf{U}_{\phi} \right) \mathbf{I} τϕ=−ρϕνϕ[∇Uϕ+∇TUϕ]+32ρϕνϕ(∇⋅Uϕ)I
以及
R ϕ = − ν ϕ , t [ ∇ U ϕ + ∇ T U ϕ ] + 2 3 ν ϕ , t ( ∇ ⋅ U ϕ ) I + 2 3 k ϕ I \mathbf{R}_{\phi} = - \nu_{\phi,\textrm{t}} \left[ \nabla \mathbf{U}_{\phi} +\nabla^{\textrm{T}} \mathbf{U}_{\phi} \right] + \frac{2}{3} \nu_{\phi,\textrm{t}} \left( \nabla \cdot \mathbf{U}_{\phi} \right) \mathbf{I} + \frac{2}{3} k_{\phi} \mathbf{I} Rϕ=−νϕ,t[∇Uϕ+∇TUϕ]+32νϕ,t(∇⋅Uϕ)I+32kϕI
代入到 R e f f , ϕ R_{eff,\phi} Reff,ϕ中,得:
R e f f , ϕ = − ( ν ϕ + ν ϕ , t ) [ ∇ U ϕ + ∇ T U ϕ ] + 2 3 ( ν ϕ + ν ϕ , t ) ( ∇ ⋅ U ϕ ) I + 2 3 k ϕ I R_{eff,\phi}=-(\nu_\phi+\nu_{\phi , t})\left[ \nabla \mathbf{U}_{\phi} +\nabla^{\textrm{T}} \mathbf{U}_{\phi} \right]+\frac{2}{3}(\nu_\phi+\nu_{\phi , t}) \left (\nabla \cdot \mathbf{U}_{\phi}\right ) \mathbf{I} + \frac{2}{3} k_{\phi} \mathbf{I} Reff,ϕ=−(νϕ+νϕ,t)[∇Uϕ+∇TUϕ]+32(νϕ+νϕ,t)(∇⋅Uϕ)I+32kϕI
令 ν e f f = ν ϕ + ν ϕ , t \nu_{eff}=\nu_\phi+\nu_{\phi , t} νeff=νϕ+νϕ,t ,则:
R e f f , ϕ = − ν e f f [ ∇ U ϕ + ∇ T U ϕ ] + 2 3 ν e f f ( ∇ ⋅ U ϕ ) I + 2 3 k ϕ I = − ν e f f ∇ U ϕ + R c , ϕ R_{eff,\phi}=-\nu_{eff}\left[ \nabla \mathbf{U}_{\phi} +\nabla^{\textrm{T}} \mathbf{U}_{\phi} \right]+\frac{2}{3}\nu_{eff} \left (\nabla \cdot \mathbf{U}_{\phi}\right ) \mathbf{I} + \frac{2}{3} k_{\phi} \mathbf{I} = -\nu_{eff}\nabla U_\phi + R_{c,\phi} Reff,ϕ=−νeff[∇Uϕ+∇TUϕ]+32νeff(∇⋅Uϕ)I+32kϕI=−νeff∇Uϕ+Rc,ϕ
其中 R c , ϕ = − ν e f f ∇ U ϕ T + 2 3 ν e f f ( ∇ ⋅ U ϕ ) I + 2 3 k ϕ I R_{c,\phi}=-\nu_{eff} \nabla \mathbf{U}^\textrm{T}_{\phi}+\frac{2}{3}\nu_{eff} \left (\nabla \cdot \mathbf{U}_{\phi}\right ) \mathbf{I} + \frac{2}{3} k_{\phi} \mathbf{I} Rc,ϕ=−νeff∇UϕT+32νeff(∇⋅Uϕ)I+32kϕI
于是得到:
∇ ⋅ [ α ϕ ρ ϕ R e f f , ϕ ] = ∇ ( α ϕ ρ ϕ ) ⋅ [ R e f f , ϕ ] + α ϕ ρ ϕ ∇ ⋅ [ R e f f , ϕ ] = α ϕ ρ ϕ ∇ ⋅ [ − ν e f f ∇ U ϕ ] + α ϕ ρ ϕ ∇ ⋅ [ R c , ϕ ] + ∇ ( α ϕ ρ ϕ ) [ − ν e f f ∇ U ϕ + R c , ϕ ] \begin{aligned} \nabla\cdot\left[\alpha_\phi\rho_\phi R_{eff,\phi}\right ] = & \nabla(\alpha_\phi\rho_\phi)\cdot\left[ R_{eff,\phi}\right] + \alpha_\phi\rho_\phi\nabla\cdot \left [ R_{eff,\phi}\right ]\\ =& \alpha_\phi\rho_\phi\nabla\cdot\left[ -\nu_{eff}\nabla U_\phi\right] + \alpha_\phi\rho_\phi\nabla\cdot\left[ R_{c,\phi}\right] + \nabla(\alpha_\phi\rho_\phi)\left[ -\nu_{eff}\nabla U_\phi + R_{c,\phi}\right] \end{aligned} ∇⋅[αϕρϕReff,ϕ]==∇(αϕρϕ)⋅[Reff,ϕ]+αϕρϕ∇⋅[Reff,ϕ]αϕρϕ∇⋅[−νeff∇Uϕ]+αϕρϕ∇⋅[Rc,ϕ]+∇(αϕρϕ)[−νeff∇Uϕ+Rc,ϕ]
代入到动量方程中,并且方程两边同时除以 α ϕ ρ ϕ \alpha_\phi\rho_\phi αϕρϕ,得到:
∂ U ϕ ∂ t + U ϕ ⋅ ∇ U ϕ − ∇ ⋅ [ ν e f f ∇ U ϕ ] + ∇ ⋅ [ R c , ϕ ] + ∇ ( α ϕ ρ ϕ ) α ϕ ρ ϕ ⋅ [ − ν e f f ∇ U ϕ + R c , ϕ ] = − ∇ p ρ ϕ + g + M ϕ α ϕ ρ ϕ \frac{\partial U_\phi}{\partial t} + U_\phi\cdot\nabla U_\phi -\nabla \cdot \left[ \nu_{eff} \nabla U_\phi \right ] + \nabla \cdot \left[ R_{c,\phi}\right] + \frac{\nabla(\alpha_\phi\rho_\phi)}{\alpha_\phi\rho_\phi}\cdot \left[ -\nu_{eff}\nabla U_\phi + R_{c,\phi}\right] = -\frac{\nabla p}{\rho_\phi} + g + \frac{M_\phi}{\alpha_\phi\rho_\phi} ∂t∂Uϕ+Uϕ⋅∇Uϕ−∇⋅[νeff∇Uϕ]+∇⋅[Rc,ϕ]+αϕρϕ∇(αϕρϕ)⋅[−νeff∇Uϕ+Rc,ϕ]=−ρϕ∇p+g+αϕρϕMϕ
如果假定两相流体均为不可压缩,密度恒为常数,于是可以得到不可压缩的双流体模型的方程组:
连续性方程
∂ ( α ϕ ) ∂ t + ∇ ⋅ ( α ϕ U ϕ ) = 0 \frac{\partial(\alpha_\phi)}{\partial t}+\nabla\cdot(\alpha_\phi U_\phi)=0 ∂t∂(αϕ)+∇⋅(αϕUϕ)=0
动量方程
∂ U ϕ ∂ t + U ϕ ⋅ ∇ U ϕ − ∇ ⋅ [ ν e f f ∇ U ϕ ] + ∇ ⋅ [ R c , ϕ ] + ∇ ( α ϕ ) α ϕ ⋅ [ − ν e f f ∇ U ϕ + R c , ϕ ] = − ∇ p ρ ϕ + g + M ϕ α ϕ ρ ϕ \frac{\partial U_\phi}{\partial t} + U_\phi\cdot\nabla U_\phi -\nabla \cdot \left[ \nu_{eff} \nabla U_\phi \right ] + \nabla \cdot \left[ R_{c,\phi}\right] + \frac{\nabla(\alpha_\phi)}{\alpha_\phi} \cdot \left[ -\nu_{eff}\nabla U_\phi + R_{c,\phi}\right] = -\frac{\nabla p}{\rho_\phi} + g + \frac{M_\phi}{\alpha_\phi\rho_\phi} ∂t∂Uϕ+Uϕ⋅∇Uϕ−∇⋅[νeff∇Uϕ]+∇⋅[Rc,ϕ]+αϕ∇(αϕ)⋅[−νeff∇Uϕ+Rc,ϕ]=−ρϕ∇p+g+αϕρϕMϕ
方程中还剩下相间作用项没有处理,对于分散相和连续项形式,相间作用力是大小相等符号想反,这里只考虑分散相的形式,令 ϕ = a \phi=a ϕ=a,则得到分散相的动量方程:
∂ U a ∂ t + U a ⋅ ∇ U a − ∇ ⋅ [ ν e f f ∇ U a ] + ∇ ⋅ [ R c , a ] + ∇ ( α a ) α a ⋅ [ − ν e f f ∇ U a + R c , a ] = − ∇ p ρ a + g + M a α a ρ a \frac{\partial U_a}{\partial t} + U_a\cdot\nabla U_a -\nabla \cdot \left[ \nu_{eff} \nabla U_a \right ] + \nabla \cdot \left[ R_{c,a}\right] + \frac{\nabla(\alpha_a)}{\alpha_a} \cdot \left[ -\nu_{eff}\nabla U_a + R_{c,a}\right] = -\frac{\nabla p}{\rho_a} + g + \frac{M_a}{\alpha_a\rho_a} ∂t∂Ua+Ua⋅∇Ua−∇⋅[νeff∇Ua]+∇⋅[Rc,a]+αa∇(αa)⋅[−νeff∇Ua+Rc,a]=−ρa∇p+g+αaρaMa
相间作用只考虑曳力,升力以及虚拟质量力,即 M , a = M d r a g + M l i f t + M v m M,a=M_{drag}+M_{lift}+M_{vm} M,a=Mdrag+Mlift+Mvm,下面分别考虑每一种相间作用力。
曳力
M d r a g = − β ( U a − U b ) M_{drag}=-\beta(U_a-U_b) Mdrag=−β(Ua−Ub),其中 β \beta β为曳力系数。
升力
M l i f t = − α a α b C l ( α b ρ b + α a ρ a ) U r × ( ∇ × U ) M_{lift}=-\alpha_a\alpha_b C_l (\alpha_b \rho_b + \alpha_a \rho_a)U_r \times (\nabla \times U) Mlift=−αaαbCl(αbρb+αaρa)Ur×(∇×U) ,其中 U r = U a − U b U_r=U_a-U_b Ur=Ua−Ub, U = α a U a + α b U b U=\alpha_a U_a + \alpha_b U_b U=αaUa+αbUb
虚拟质量力
M v m = α a α b C v m ρ b [ D U b D t − D U a D t ] M_{vm}=\alpha_a\alpha_b C_{vm}\rho_b\left[ \frac{DU_b}{Dt}-\frac{DU_a}{Dt}\right] Mvm=αaαbCvmρb[DtDUb−DtDUa],其中 D D t \frac{D}{Dt} DtD表示物质导数, D U b D t = ∂ U b ∂ t + U b ⋅ ∇ U b \frac{DU_b}{Dt}=\frac{\partial U_b}{\partial t} + U_b \cdot \nabla U_b DtDUb=∂t∂Ub+Ub⋅∇Ub, D U a D t = ∂ U a ∂ t + U a ⋅ ∇ U a \frac{DU_a}{Dt}=\frac{\partial U_a}{\partial t}+U_a \cdot \nabla U_a DtDUa=∂t∂Ua+Ua⋅∇Ua
考虑到形式的统一,令 K = β α a α b K=\frac{\beta}{\alpha_a\alpha_b} K=αaαbβ,则曳力可表示为 M d r a g = − α a α b K ( U a − U b ) M_{drag}=-\alpha_a\alpha_b K(U_a-U_b) Mdrag=−αaαbK(Ua−Ub)
代入到分散相a的动量方程中,得到:
∂ U a ∂ t + U a ⋅ ∇ U a − ∇ ⋅ [ ν e f f ∇ U a ] + ∇ ⋅ [ R c , a ] + ∇ ( α a ) α a ⋅ [ − ν e f f ∇ U a + R c , a ] = − ∇ p ρ a + g − α b ρ a K ( U a − U b ) − α b ρ a C l ( α b ρ b + α a ρ a ) U r × ( ∇ × U ) + α b ρ a C v m ρ b [ ∂ U b ∂ t + U b ⋅ ∇ U b − ( ∂ U a ∂ t + U a ⋅ ∇ U a ) ] \begin{aligned} &\frac{\partial U_a}{\partial t} + U_a\cdot \nabla U_a -\nabla \cdot \left[ \nu_{eff} \nabla U_a \right ] + \nabla \cdot \left[ R_{c,a}\right] + \frac{\nabla(\alpha_a)}{\alpha_a} \cdot \left[ -\nu_{eff}\nabla U_a + R_{c,a}\right] \\ = & -\frac{\nabla p}{\rho_a} + g - \frac{\alpha_b}{\rho_a} K (U_a-U_b) - \frac{\alpha_b}{\rho_a} C_l (\alpha_b \rho_b + \alpha_a \rho_a) U_r \times (\nabla \times U) \\ +& \frac{\alpha_b}{\rho_a} C_{vm}\rho_b\left[ \frac{\partial U_b}{\partial t} + U_b \cdot \nabla U_b - (\frac{\partial U_a}{\partial t}+U_a \cdot \nabla U_a)\right] \end{aligned} =+∂t∂Ua+Ua⋅∇Ua−∇⋅[νeff∇Ua]+∇⋅[Rc,a]+αa∇(αa)⋅[−νeff∇Ua+Rc,a]−ρa∇p+g−ρaαbK(Ua−Ub)−ρaαbCl(αbρb+αaρa)Ur×(∇×U)ρaαbCvmρb[∂t∂Ub+Ub⋅∇Ub−(∂t∂Ua+Ua⋅∇Ua)]
将相关的项合并,并调整顺序,便得到与twoPhaseEulerFoam求解器的UEqn.H文件中相同形式的分散相动量方程:
( 1 + α b ρ b ρ a C v m ) ( ∂ U a ∂ t + U a ⋅ ∇ U a ) − ∇ ⋅ [ ν e f f ∇ U a ] + ∇ ⋅ [ R c , a ] + ∇ ( α a ) α a ⋅ [ − ν e f f ∇ U a + R c , a ] = − α b ρ a K U a − α b ρ a { C l ( α b ρ b + α a ρ a ) U r × ( ∇ × U ) − C v m ρ b [ ∂ U b ∂ t + U b ⋅ ∇ U b ] } − ∇ p ρ a + g + α b ρ a K U b \begin{aligned} &(1+\frac{\alpha_b \rho_b}{\rho_a} C_{vm})(\frac{\partial U_a}{\partial t} + U_a\cdot \nabla U_a ) -\nabla \cdot \left[ \nu_{eff} \nabla U_a \right ] + \nabla \cdot \left[ R_{c,a}\right] + \frac{\nabla(\alpha_a)}{\alpha_a} \cdot \left[ -\nu_{eff}\nabla U_a + R_{c,a}\right] \\ = & -\frac{\alpha_b}{\rho_a} K U_a - \frac{\alpha_b}{\rho_a} \left\{ {C_l (\alpha_b \rho_b + \alpha_a \rho_a) U_r \times (\nabla \times U) - C_{vm}\rho_b\left[ {\frac{\partial U_b}{\partial t} + U_b \cdot \nabla U_b }\right] } \right\} \\ &- \frac{\nabla p}{\rho_a} + g + \frac{\alpha_b}{\rho_a} K U_b \end{aligned} =(1+ρaαbρbCvm)(∂t∂Ua+Ua⋅∇Ua)−∇⋅[νeff∇Ua]+∇⋅[Rc,a]+αa∇(αa)⋅[−νeff∇Ua+Rc,a]−ρaαbKUa−ρaαb{Cl(αbρb+αaρa)Ur×(∇×U)−Cvmρb[∂t∂Ub+Ub⋅∇Ub]}−ρa∇p+g+ρaαbKUb
连续相b的动量方程形式相仿,这里就不再重复了。这里有几点注意事项:
此处的双流体模型在推导的过程中,是把a当作分散相,b当作连续相的。分散相的体积分率 α a \alpha_a αa可以等于0,但是连续项体积分率 α b \alpha_b αb不能等于0 ,否则会出问题。
曳力系数 β \beta β 的形式就是文献中常见的形式,比如,WenYu 曳力系数 β = 3 4 ( 1 − α b ) α b d p , a ∣ U b − U a ∣ C D 0 α b − 2.7 \beta=\frac{3}{4}\frac{(1-\alpha_b)\alpha_b}{d_{p,a}}|U_b-U_a|C_{D0}\alpha_b^{-2.7} β=43dp,a(1−αb)αb∣Ub−Ua∣CD0αb−2.7,Ergun 曳力系数 β = 150 ( 1 − α b ) 2 μ b α b d a 2 + 1.75 ( 1 − α b ) ρ b U b − U a d a \beta=150\frac{(1-\alpha_b)^2\mu_b}{\alpha_b d_a^2}+1.75\frac{(1-\alpha_b)\rho_b{U_b-U_a}}{d_a} β=150αbda2(1−αb)2μb+1.75da(1−αb)ρbUb−Ua。而程序中定义的 K = β α a α b K=\frac{\beta}{\alpha_a\alpha_b} K=αaαbβ,所以,当 α b → 0 \alpha_b\to 0 αb→0时,如果用WenYu曳力那还不会出错,因为曳力系数中的分子里同时含有 α a α b \alpha_a\alpha_b αaαb,运算 K = β α a α b K=\frac{\beta}{\alpha_a\alpha_b} K=αaαbβ不会出现除以0的问题;但如果用Ergun曳力,那就要出问题了,因为Ergun曳力系数中两项的分子都没有 α b \alpha_b αb,所以运算 K = β α a α b K=\frac{\beta}{\alpha_a\alpha_b} K=αaαbβ就要出问题了。
相关文章:

OpenFOAM: twoPhaseEulerFoam解读
twoPhaseEulerFoam全解读之一(转载) 本系列将对OpenFOAM-2.1.1 中的 twoPhaseEulerFoam 求解器进行完全解读,共分三部分:方程推导,代码解读,补充说明。本篇进行方程推导,详细介绍如果从双流体模型出发得到 twoPhaseEu…...

ffmpeg跨平台arm编译-ubuntu
目录 1. 安装必要的编译器2. 安装必要的依赖项3. 配置编译选项4. 编译安装 1. 安装必要的编译器 32位系统: sudo apt-get update sudo apt-get install gcc-arm-linux-gnueabihf sudo apt-get install g-arm-linux-gnueabihf64位系统: sudo apt-get u…...

Vue 网络处理 - axios 异步请求的使用,请求响应拦截器
目录 一、axiox 1.1、axios 简介 1.2、axios 基本使用 1.2.1、下载核心 js 文件. 1.2.2、发送 GET 异步请求 1.2.3、发送 POST 异步请求 1.2.4、发送 GET、POST 请求最佳实践 1.3、请求响应拦截器 1.3.1、拦截器解释 1.3.2、请求拦截器的使用 1.3.3、响应拦截器的使用…...
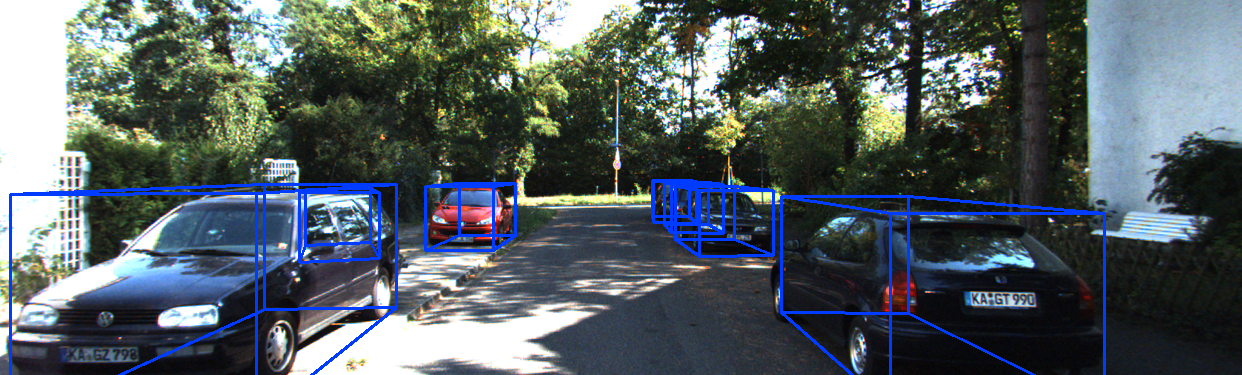
单目3D目标检测——MonoDLE 模型训练 | 模型推理
本文分享 MonoDLE 的模型训练、模型推理、可视化3D检测结果。 模型原理,参考我这篇博客:【论文解读】单目3D目标检测 MonoDLE(CVPR2021)_一颗小树x的博客-CSDN博客 源码地址:https://github.com/xinzhuma/monodle 目…...

CSS悬停卡片翻转明信片效果源码附注释
运行效果演示: HTML页面代码: <!DOCTYPE html> <html lang="en" > <head>...
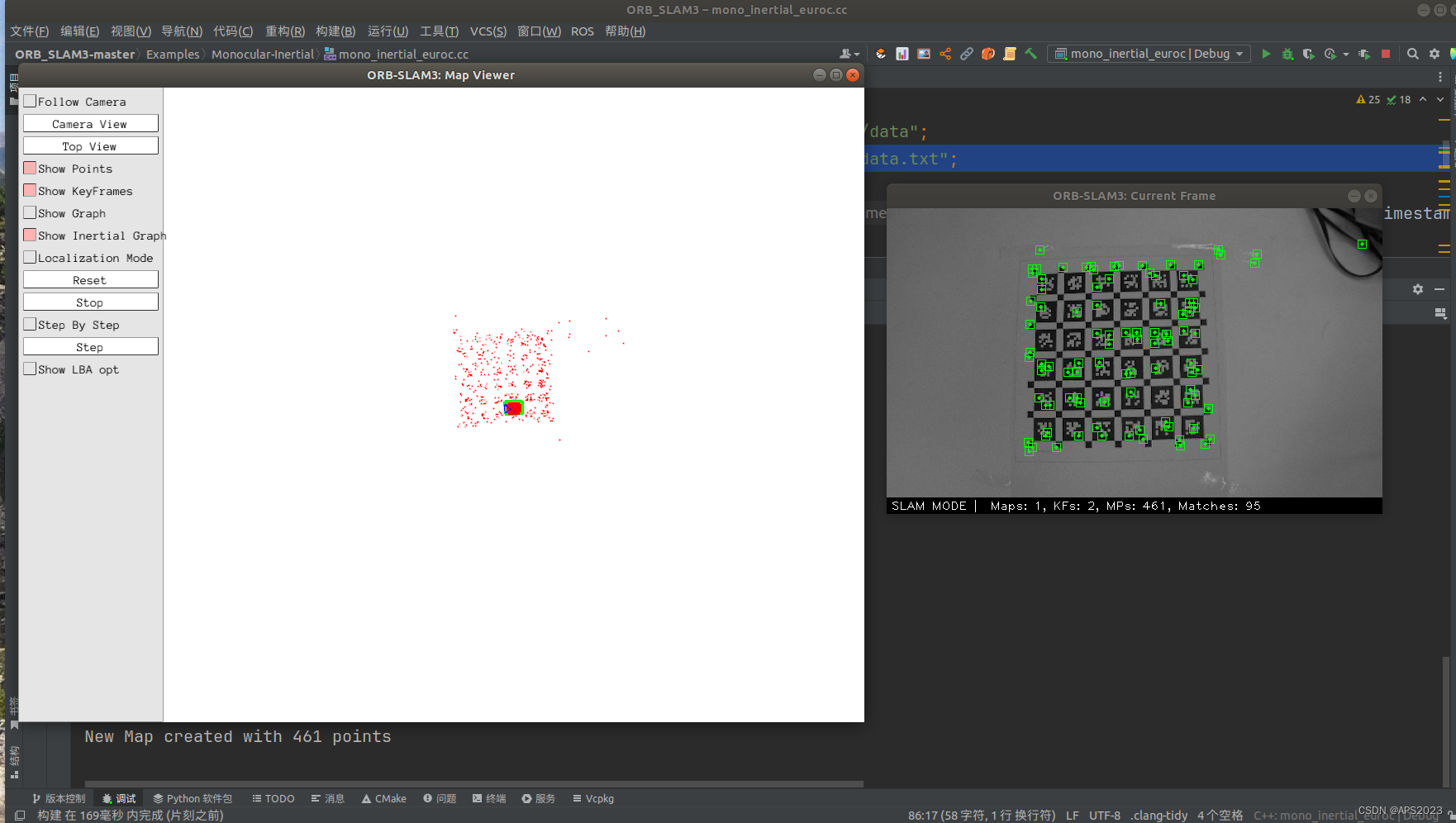
使用kaliber与imu_utils进行IMU、相机+IMU联合标定
目录 1 标定工具编译 1.1 IMU标定工具 imu_utils 1.2 相机标定工具 kaliber 2 标定数据录制 3 开始标定 3.1 IMU标定 3.2 相机标定 3.3 相机IMU联合标定 4 将参数填入ORBSLAM的文件中 1 标定工具编译 1.1 IMU标定工具 imu_utils 标定IMU我们使用imu_utils软件进行标定…...

统一观测丨使用 Prometheus 监控 SQL Server 最佳实践
作者:啃唯 SQL Server 简介 SQL Server 是什么? Microsoft SQL Server 是 Microsoft 推出的关系型数据库解决方案,支持企业 IT 环境中的各种事务处理、商业智能和分析应用程序。Microsoft SQL Server 是市场领先的数据库技术之一。 SQL S…...
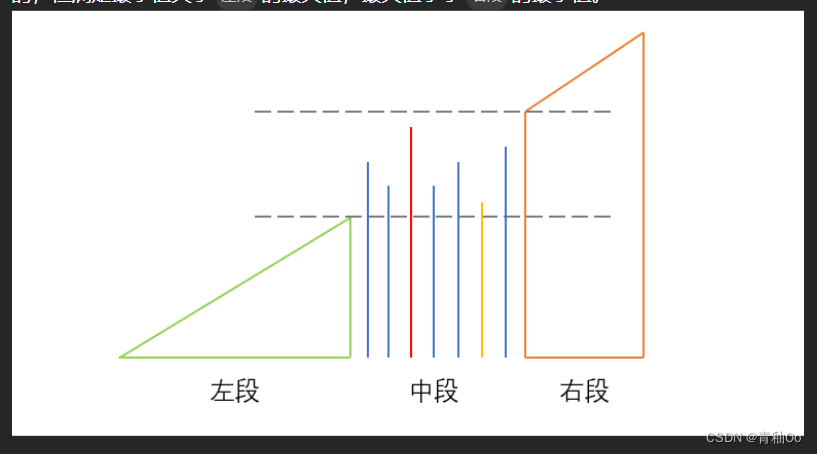
最短无序连续子数组
题目链接 最短无序连续子数组 题目描述 注意点 找出符合题意的 最短 子数组,并输出它的长度-100000 < nums[i] < 100000 解答思路 本题的数组可以分为三段,左段中段和右段,如下图所示 观察规律可知,左段元素始终比中段…...
更新 | 持续开源迅为RK3568驱动指南第十二篇-GPIO子系统
《iTOP-RK3568开发板驱动开发指南》更新,本次更新内容对应的是驱动(第十二期_GPIO子系统-全新升级)视频,后续资料会不断更新,不断完善,帮助用户快速入门,大大提升研发速度。 文档教程更新至第十…...
centos7安装erlang23.3.4.11及rabbitmq3.9.16版本
rpm包有系统版本要求,el是Red Hat Enterprise Linux(EL)的缩写。 EL7是Red Hat 7.x,Centos 7.x EL8是Red Hat 8.x, Centos 8.x 所以我们在安装erlang及rabbitmq时需要选择与自己的服务器相对应的rpm包 # rabbitmq的rpm安装包 https://github.com/rabbi…...
VMware和Debian下载
文章目录 ⭐️写在前面的话⭐️一、VMware二、Debain三、建立虚拟机🚀 先看后赞,养成习惯!🚀🚀 先看后赞,养成习惯!🚀 ⭐️写在前面的话⭐️ CSDN主页:程序员好冰 目前在…...
mysql面试题48:MySQL中 Innodb的事务与日志的实现方式
该文章专注于面试,面试只要回答关键点即可,不需要对框架有非常深入的回答,如果你想应付面试,是足够了,抓住关键点 面试官: Innodb的事务与日志的实现方式 以下是InnoDB事务和日志的实现方式的详细说明: 事务日志(Transaction Log): InnoDB使用事务日志来保证事务的…...
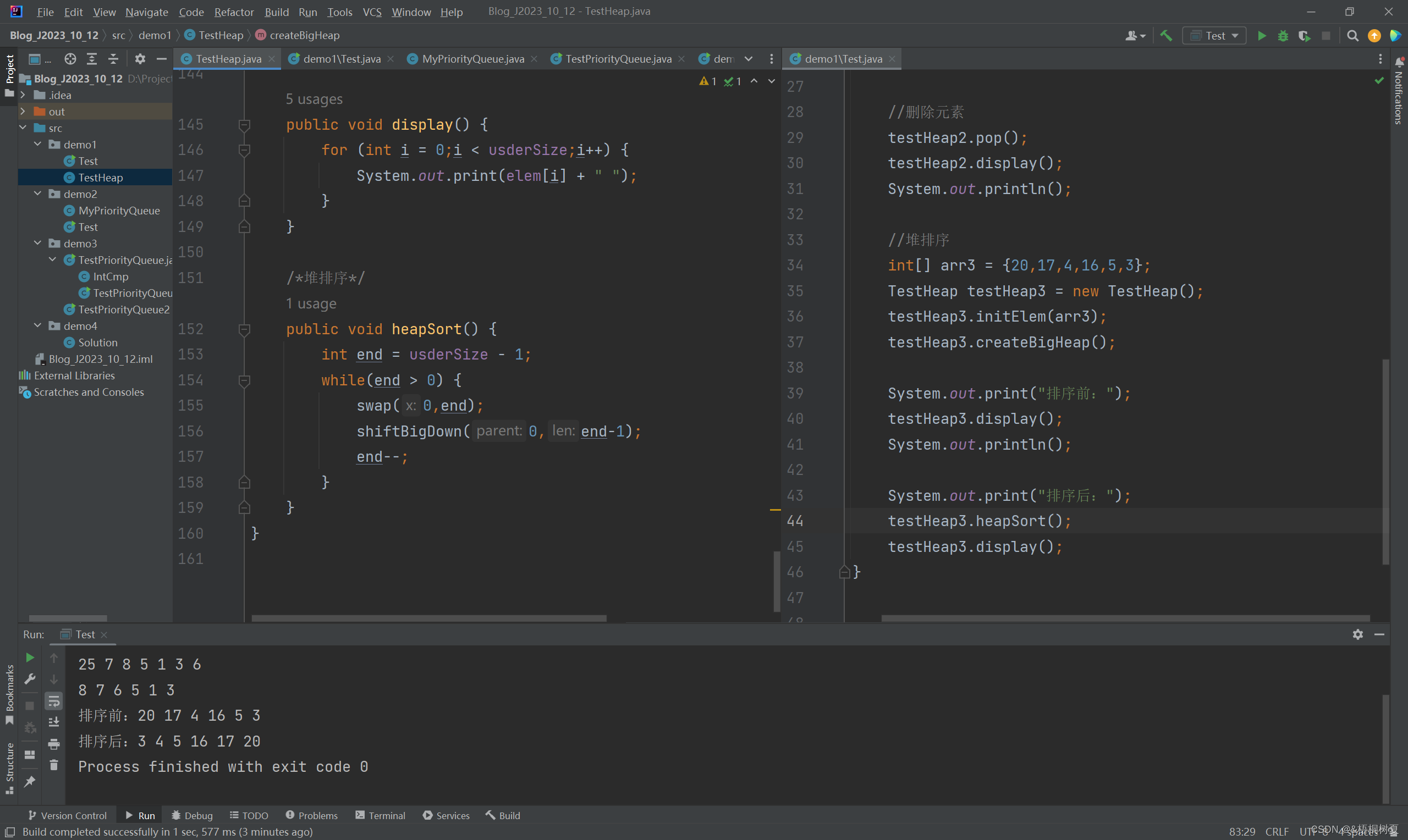
数据结构 优先级队列(堆)
数据结构 优先级队列(堆) 文章目录 数据结构 优先级队列(堆)1. 优先级队列1.1 概念 2. 优先级队列的模拟实现2.1 堆的概念2.2 堆的存储方式2.3 堆的创建2.3.1 堆向下调整2.3.2 堆的创建2.3.3 建堆的时间复杂度 2.4 堆的插入与删除2.4.1 堆的插入2.4.2 堆的删除 2.5 用堆模拟实现…...
如何在edge浏览器中给PDF添加文字批注
我用的edge浏览器是目前最新版的(一般自动更新到最新版) 最近,我喜欢用edge浏览器查看PDF,节省电脑资源,快捷且方便。 但edge对PDF的标注种类较少,主要是划线和涂色,文字批注功能尚未出现在工具…...
集成学习的小九九
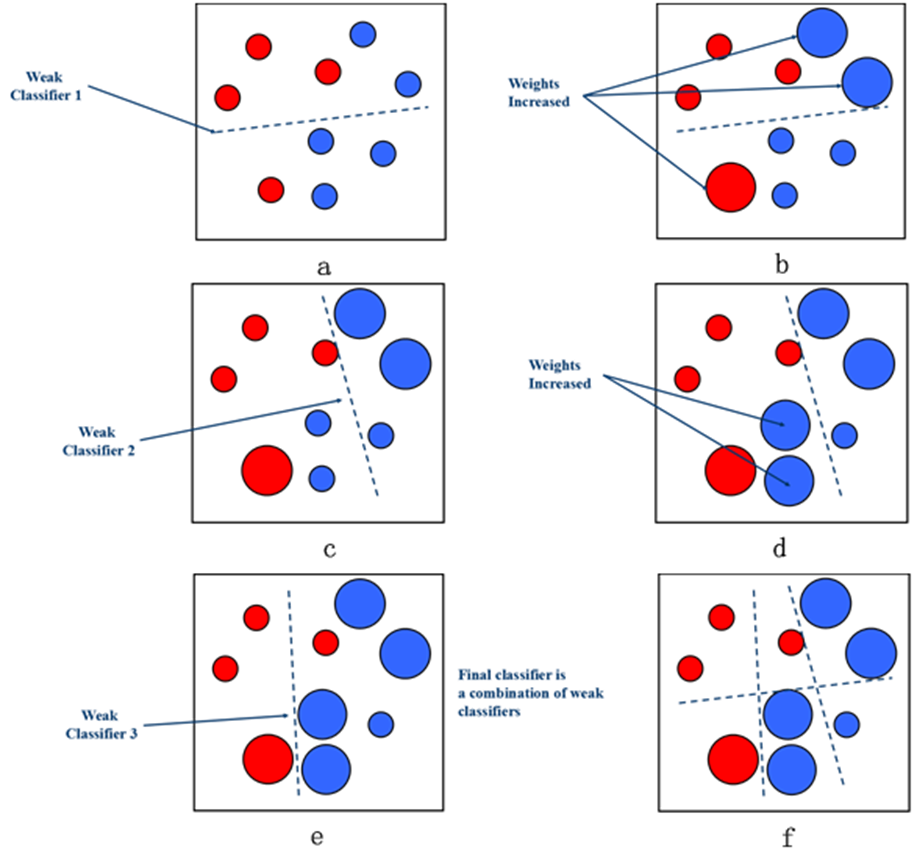
集成学习(Ensemble Learning)是一种机器学习的方法,通过结合多个基本模型的预测结果来进行决策或预测。集成学习的目标是通过组合多个模型的优势,并弥补单个模型的不足,从而提高整体性能。 集成学习的主要策略 在集成…...
深入理解Scrapy
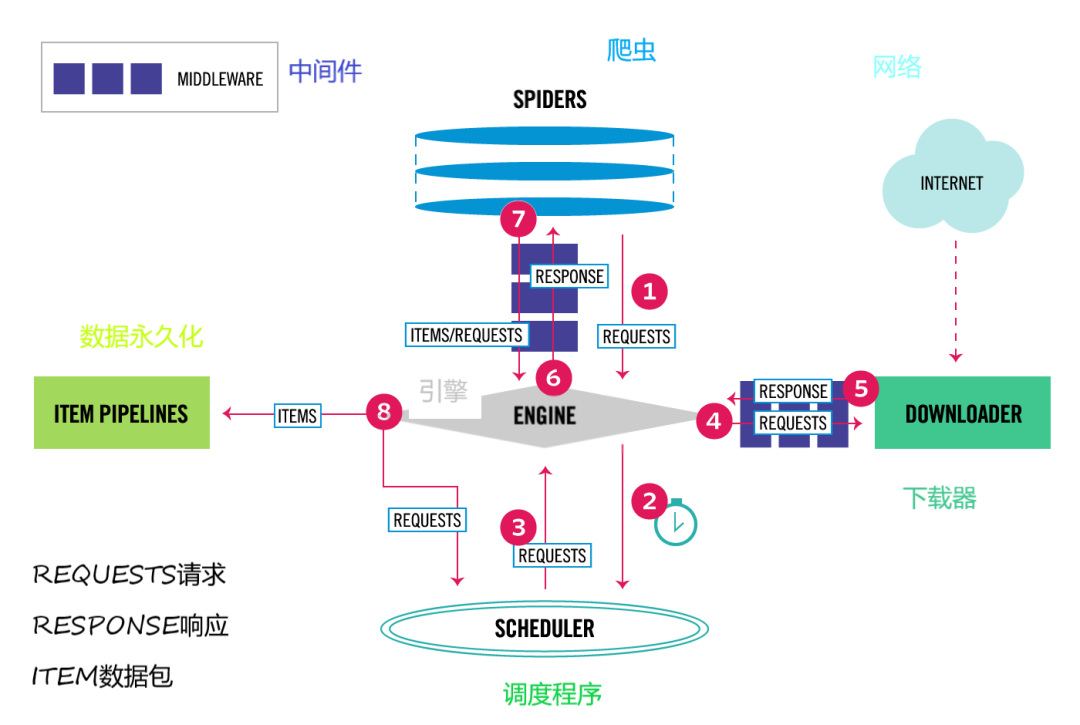
Scrapy是什么 An open source and collaborative framework for extracting the data you need from websites. In a fast, simple, yet extensible way. Scrapy是适用于Python的一个快速、简单、功能强大的web爬虫框架,通常用于抓取web站点并从页面中提取结构化的数…...
想做WMS仓库管理系统,找了好久才找到云表
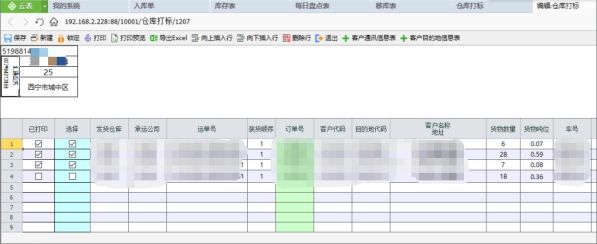
公司内部仓库管理原方式均基于人工电子表格管理方式来实现收发存管理,没有流程化管理,无法保证数据的准确性和及时性,同时现场操作和数据核对会出现不同步的情况,无法提高仓库的运作效率,因此,我们基于云表…...
公司销售个人号如何管理?
微信管理系统可以帮助企业解决哪些问题呢? 一、解决聊天记录监管问题 1.聊天记录的保存,让公司的管理者可以随时查看公司任意销售与客户的聊天记录,不用一个一个员工逐一去看,方便管理; 2.敏感词监控,管理者…...

COLE HERSEE 48408 工业4.0、制造业X和元宇宙
COLE HERSEE 48408 工业4.0、制造业X和元宇宙 需要数据来释放工业4.0的全部潜力——价值链中的所有公司都可以访问大量数据。一个新的互联数据生态系统旨在提供解决方案:制造业x。 在德国联邦经济事务和气候行动部以及BDI、VDMA和ZVEI贸易协会的密切合作下,实施制…...
【Vue基础-数字大屏】加载动漫效果
一、需求描述 当网页正在加载而处于空白页面状态时,可以在该页面上显示加载动画提示。 二、步骤代码 1、全局下载npm install -g json-server npm install -g json-server 2、在src目录下新建文件夹mock,新建文件data.json存放模拟数据 {"one&…...

TCP连接关闭的艺术:从FIN优雅挥手到RST强制终结
1. TCP连接关闭的两种核心机制 想象一下你正在和朋友通电话,结束通话时有礼貌地说"再见"和直接挂断有什么区别?这就是TCP连接关闭的FIN与RST两种方式的本质区别。作为后端工程师,我在处理线上服务连接异常时,发现90%的问…...

数据库课程设计智能指导:Phi-4-mini-reasoning辅助ER图设计与SQL优化
数据库课程设计智能指导:Phi-4-mini-reasoning辅助ER图设计与SQL优化 1. 课程设计的痛点与解决方案 每到学期中段,计算机专业的学生们都会面临一个共同挑战——数据库课程设计。从需求分析到ER图设计,再到SQL语句编写,每个环节都…...
别再只调参了!深入DeepSORT的tracker.py:从轨迹管理到状态机,看懂跟踪器如何‘思考’
深入DeepSORT的tracker.py:从轨迹管理到状态机,看懂跟踪器如何‘思考’ 在目标跟踪领域,调试模型时遇到的ID频繁切换、轨迹断裂等问题往往令人头疼。许多开发者虽然能够跑通DeepSORT算法,但当需要针对特定场景优化时,却…...

像素剧本圣殿企业应用:中小型内容工作室剧本量产工作流搭建
像素剧本圣殿企业应用:中小型内容工作室剧本量产工作流搭建 1. 剧本创作新范式 在内容创作行业,剧本开发一直是耗时费力的核心环节。传统编剧流程中,一个完整剧本从构思到成稿往往需要数周甚至数月时间,这对于资源有限的中小型工…...

二维码修复:3大场景+5步流程,零代码基础也能掌握的受损二维码恢复指南
二维码修复:3大场景5步流程,零代码基础也能掌握的受损二维码恢复指南 【免费下载链接】qrazybox QR Code Analysis and Recovery Toolkit 项目地址: https://gitcode.com/gh_mirrors/qr/qrazybox 日常生活中,我们经常遇到二维码因污渍…...

Cursor + Claude 3.7:解锁高效编程新范式
1. 为什么开发者需要CursorClaude 3.7组合 最近在重构一个遗留的电商系统时,我遇到了所有程序员都头疼的问题:面对20万行混杂着jQuery和Vue的祖传代码,光是理清支付模块的业务逻辑就花了三天。直到同事推荐了CursorClaude 3.7这个组合&#x…...

DOL-CHS-MODS:一站式游戏体验优化整合方案
DOL-CHS-MODS:一站式游戏体验优化整合方案 【免费下载链接】DOL-CHS-MODS Degrees of Lewdity 整合 项目地址: https://gitcode.com/gh_mirrors/do/DOL-CHS-MODS 方案价值:为何选择整合方案 DOL-CHS-MODS 提供了一种智能化的游戏资源整合解决方案…...

别再死记硬背了!用Verilog手写一个四位加减法器,帮你彻底搞懂补码和逻辑门
从逻辑门到补码运算:Verilog四位加减法器的硬件思维解密 记得第一次在《数字逻辑》课上听到"补码"这个概念时,我和大多数同学一样满脸困惑——为什么计算机要用这么绕的方式处理负数?直到亲手用Verilog实现了一个四位加减法器&…...

palworld-host-save-fix:跨环境存档迁移的技术突破与实践指南
palworld-host-save-fix:跨环境存档迁移的技术突破与实践指南 【免费下载链接】palworld-host-save-fix 项目地址: https://gitcode.com/gh_mirrors/pa/palworld-host-save-fix 一、问题溯源:幻兽帕鲁存档迁移的核心挑战 核心价值:深…...

Gemma-3-12B-IT WebUI保姆级教程:含Supervisord进程守护与开机自启
Gemma-3-12B-IT WebUI保姆级教程:含Supervisord进程守护与开机自启 1. 前言:为什么选择Gemma-3-12B-IT? 如果你正在寻找一个性能强劲、部署友好,而且完全免费开源的大语言模型,那么Google的Gemma-3-12B-IT绝对值得你…...