ubuntu 18.04 LTS交叉编译opencv 3.4.16并编译工程[全记录]
一、下载并解压opencv 3.4.16源码
https://opencv.org/releases/
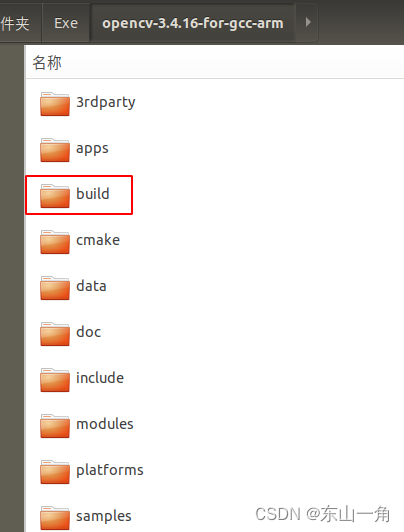
放到home路径下的Exe文件夹(专门放用户安装的软件)中,其中build是后期自建的
为了版本控制,保留了3.4.16,并增加了-gcc-arm
二、安装cmake和cmake-gui
我用命令安装的,版本不是最新的,但二者的版本是匹配的。
sudo apt install cmake
sudo apt-get install cmake-gui
查看版本

三、启动cmake-gui并编译opencv 3.4.16
1.启动cmake-gui对话框
sudo cmake-gui
2.在opencv源码路径下新建build文件夹(用于存放编译文件)
3.在/usr/local路径下新建opencv3.4.16-gcc-arm文件夹(用于存放编译结果)
4.对话框设置
参考博文:https://blog.csdn.net/xiaopang_love_study/article/details/121617995#t7
部分设置截图如下:
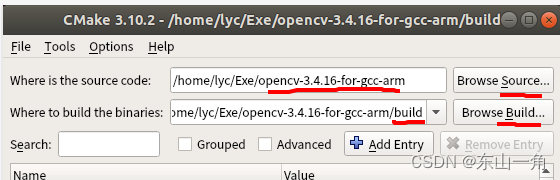
4.1设置source和build为opencv解压后的路径,之后点击configure
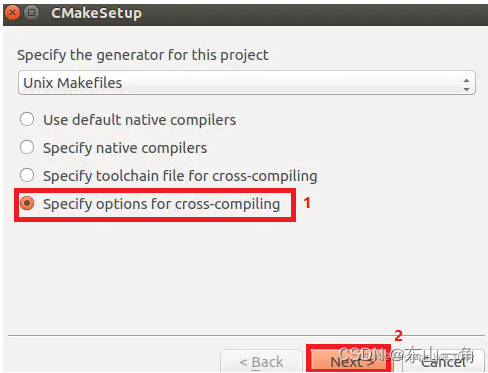
4.2选择交叉编译器
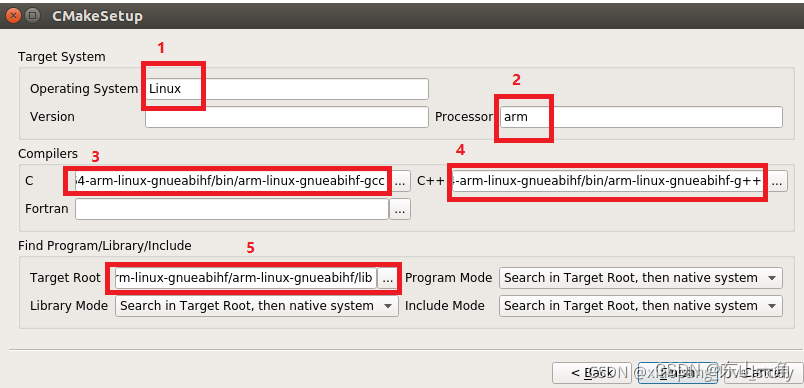
4.3设置编译器为gcc-arm,该编译器之前解压到了Exe文件夹中了,并不是命令安装的,但设置了gcc-arm相关的环境变量(百度搜索安装方法即可,编译器的完整名称:gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf)。
(C、C++、Target Root均来自该编译器目录,其他Target Root选择lib文件夹,而不是lib64文件夹)
其他默认。点“Finish”
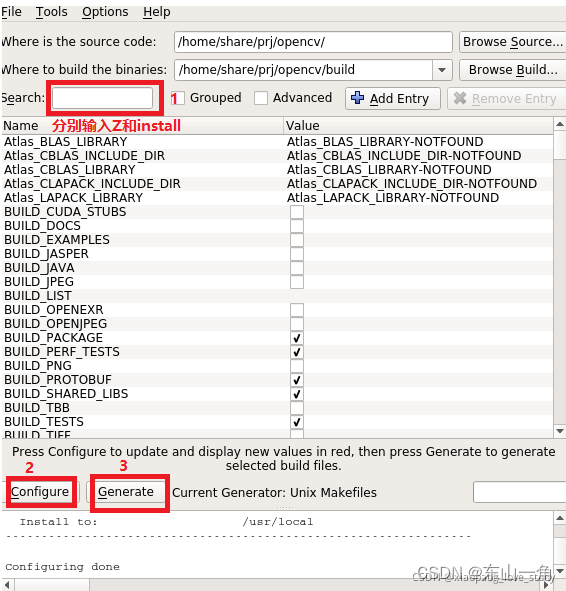
在新的对话框中的Search框搜索输入Z和install:
Z:把搜索到的BUILD_ZLIB打勾。
install:把搜索到的安装路径改为/usr/local/opencv3.4.16-gcc-arm
(之前新建了opencv3.4.16-gcc-arm,方便后期移植到arm环境时拷贝lib文件夹)
依次点Configure、Generate。如果红色的行都消失了,说明配置成功。关闭CMake对话框。
四、编译和安装OpenCV 3.4.16
1.进入opencv源文件夹内的build路径
执行
cd opencv/build #进入配置好的编译目录
sudo make -j4 #启动4个核一起编译
sudo make install #拷贝编译结果到/usr/local/opencv3.4.16-gcc-arm目录
若有编译错误,参考原博文https://blog.csdn.net/xiaopang_love_study/article/details/121617995#t7
或其他博文
2.设置环境变量
2.1设置/etc/ld.so.conf.d/opencv.conf
sudo gedit /etc/ld.so.conf.d/opencv.conf
在opencv.conf中添加
/usr/local/opencv3.4.16-gcc-arm/lib
如下图

加载操作
sudo ldconfig
2.设置/etc/bash.bashrc
sudo gedit /etc/bash.bashrc
添加
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
更新环境变量
source /etc/bash.bashrc
sudo updatedb
-------------------至此,opencv被gcc-arm编译并安装完成。---------------------------
五、交叉编译opencv 3.4.16工程
1.参考博文:https://blog.csdn.net/xiaopang_love_study/article/details/121617995#t7
编写mergeImg.cpp代码和CMakeLists.txt
mergeImg.cpp
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/opencv.hpp"
#include "opencv2/core/core.hpp"
#include <iostream>
#include <stdio.h>using namespace cv;
using namespace std;int main(int argc, char **argv)
{Mat imsrc1 = imread(argv[1]);Mat imsrc2 = imread(argv[2]);Mat imsrc2_scaler; //将imsrc2缩放到imsrc1的尺寸Mat imdst; //合成的目标图像double alpha = 0.3;double gamma = 0;if(imsrc1.size() != imsrc2.size()){printf("resize start!\n");resize(imsrc2, imsrc2_scaler, imsrc1.size(), 0, 0, INTER_LINEAR);addWeighted(imsrc1, alpha, imsrc2_scaler, 1 - alpha, gamma, imdst);}else{addWeighted(imsrc1, alpha, imsrc2, 1 - alpha, gamma, imdst);}imwrite("imdst.jpg", imdst);return 0;
}
CMakeLists.txt
cmake_minimum_required (VERSION 3.5.1)PROJECT (mergeImg)set(OpenCV_DIR /usr/local/opencv3.4.16-gcc-arm/lib)
include_directories(/usr/local/opencv3.4.16-gcc-arm/include)
find_package(OpenCV REQUIRED)add_executable (mergeImg "mergeImg.cpp")
target_link_libraries(${PROJECT_NAME} ${OpenCV_LIBS} -lpthread -ldl)
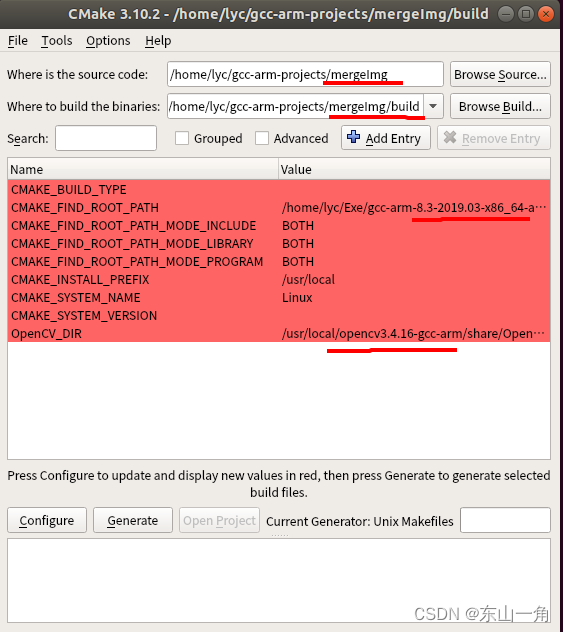
2.利用cmake-gui编译mergeImg工程,生成makefile等文件
流程与上述编译opencv类似,其中:
(1)code和binaries均为mergeImg工程路径(build是新建的,用于存储编译文件)
(2)CAMKE_FIND_ROOT_PATH默认为gcc-arm的lib文件夹/home/lyc/Exe/gcc-arm-8.3-2019.03-x86_64-arm-linux-gnueabihf/lib (之前在home文件夹内安装的)
(3)OpenCV_DIR默认为/usr/local/opencv3.4.16-gcc-arm/share/OpenCV(注意:之前我将opencv安装在了home文件夹,但cmake-gui中的OpenCV_DIR默认是/usr/local,尝试了多种方法仍无法修改,configure后仍为/usr/local,最后选择将opencv安装在/usr/local,避免了修改cmake-gui中的OpenCV_DIR)
(4)依次点击configure、generate
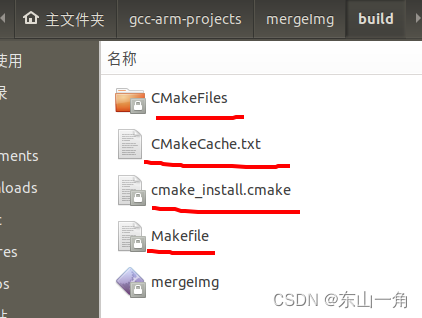
该过程在build文件夹中生成的文件如下(有些可能是make命令生成的,记不清了):
3.make命令行编译mergeImg工程
在命令窗口中,进入build文件夹,执行:
sudo make -j4
即可得到执行文件mergeImg

因交叉编译,执行文件只能在arm平台上运行,需要查看可执行文件是否符合arm框架
参考博文:https://blog.csdn.net/qq_44681788/article/details/130901649
file mergeImg

或者
readelf -h mergeImg
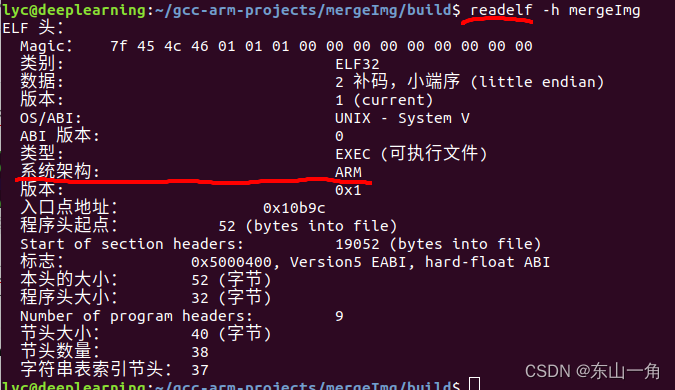
可以看出,执行文件符合ARM架构。
至此,交叉编译完毕。
六、移植编译结果
将执行文件mergeImg,两张图像angle.jpg和plane.jpg放到opencv_test_V2文件夹中,与opencv编译结果opencv3.4.16-gcc-arm文件夹(在上述/usr/local/中)一起移植:
(1)opencv_test_V2放到arm环境的用户目录下
(2)opencv3.4.16-gcc-arm文件夹放到arm环境/usr/local/下
在arm环境中,进入opencv_test_V2,执行命令:
./mergeImg plane.jpg angle.jpg
执行文件将两张图像angle.jpg和plane.jpg进行了融合,得到运行结果imdst.jpg
 至此,移植完毕!
至此,移植完毕!
相关文章:
ubuntu 18.04 LTS交叉编译opencv 3.4.16并编译工程[全记录]
一、下载并解压opencv 3.4.16源码 https://opencv.org/releases/ 放到home路径下的Exe文件夹(专门放用户安装的软件)中,其中build是后期自建的 为了版本控制,保留了3.4.16,并增加了-gcc-arm 二、安装cmake和cmake-g…...
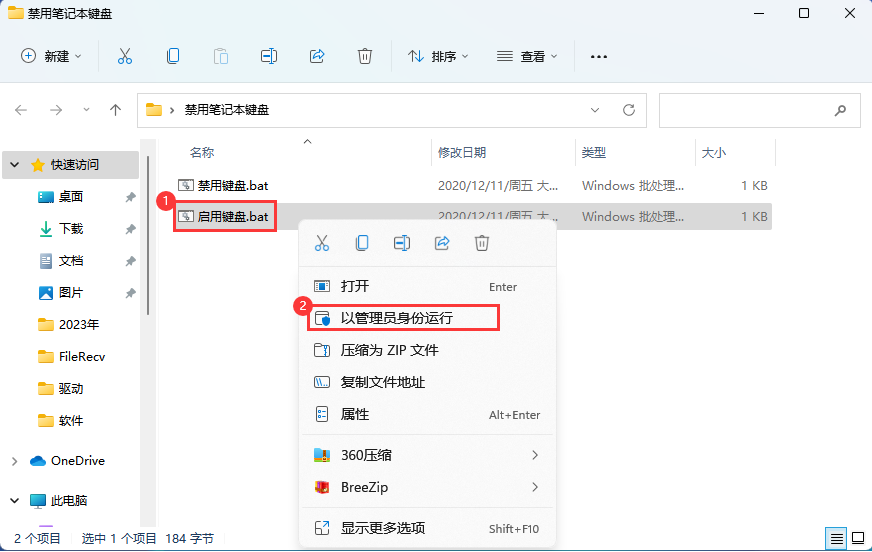
禁用和开启笔记本电脑的键盘功能,最快的方式
笔记本键盘通常较小,按键很不方便,当我们外接了键盘时就不需要再使用自带的键盘了,而且午睡的时候,总是担心碰到笔记本的键盘,可能会删掉我们的代码什么的,所以就想着怎么禁用掉,下面是操作步骤…...
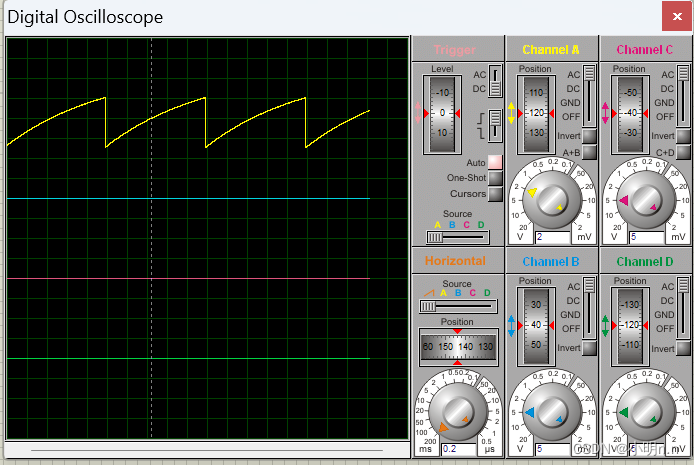
【单片机基础】使用51单片机制作函数信号发生器(DAC0832使用仿真)
文章目录 (1)DA转换(2)DAC0832简介(3)电路设计(4)参考例程(5)参考文献 (1)DA转换 单片机作为一个数字电路系统,当需要采集…...
springcloud组件
https://www.bilibili.com/video/BV1QX4y1t7v5?p32&vd_source297c866c71fa77b161812ad631ea2c25 eureka : 主要是收集服务的注册信息。 如果有了eureka启动了。内部之前的调用其实就可以用服务名了, 本来是要是用ip端口来访问的,只要eureka启来了…...

手机爬虫用Appium详细教程:利用Python控制移动App进行自动化抓取数据
Appium是一个强大的跨平台工具,它可以让你使用Python来控制移动App进行自动化操作,从而实现数据的抓取和处理。今天,我将与大家分享一份关于使用Appium进行手机爬虫的详细教程,让我们一起来探索Appium的功能和操作,为手…...

deb包构建详解
deb包构建详解 一、deb包构建流程二、deb包构建描述文件详解2.1 control文件2.2 postinst 文件 (post-installation script)2.3 postrm 文件 (post-removal script)2.4 prerm 文件 (pre-removal script)2.5 preinst 文件 (pre-installation script)2.6 rules 文件2.7 changelog…...

【Spring Cloud】网关Gateway的请求过滤工厂RequestRateLimiterGatewayFilterFactory
概念 关于微服务网关Gateway中有几十种过滤工厂,这一篇博文记录的是关于请求限流过滤工厂,也就是标题中的RequestRateLimiterGatewayFilterFactory。这个路由过滤工厂是用来判断当前请求是否应该被处理,如果不会被处理就会返回HTTP状态码为42…...

自己写spring boot starter问题总结
1. Unable to find main class 创建spring boot项目写自己的starterxi写完之后使用install出现Unable to find main class,这是因为spring boot打包需要一个启动类,按照以下写法就没事 <plugins><plugin><groupId>org.springframewo…...

vue3如何打开页面即向后端发送请求
目录 背景: 实现: 1、使用 2、案例 补充: 1、如何定义一个集合来接受后端返回的list 2、加入请求头 背景: 如果想在页面刚加载时向后端发送请求,可以使用Vue 3的生命周期钩子函数onMounted来实现 实现ÿ…...
【软考】9.2 串/数组/矩阵/广义表/树
《字符串》 一种特殊的线性表,数据元素都为字符模式匹配:寻找子串第一次在主串出现的位置 模式匹配算法 1. 暴力破解法(布鲁特-福斯算法) 主串与子串一个个匹配效率低 2. KMP算法 主串后缀和子串前缀能否找到一样的元素…...
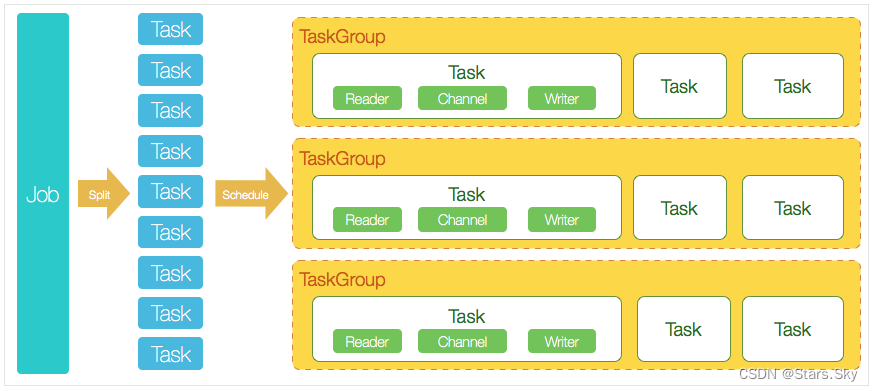
大数据 DataX 数据同步数据分析入门
目录 一、DataX 概览 1.1 DataX 是什么 1.2 DataX 3.0 概览 设计理念 当前使用现状 二、DataX 详解 2.1 DataX 3.0 框架设计 2.2 DataX 3.0 插件体系 2.3 DataX 3.0 核心架构 2.3.1 核心模块介绍 2.3.2 DataX 调度流程 2.4 DataX 3.0 的六大核心优势 2.4.1 可靠的…...

【京东开源项目】微前端框架MicroApp 1.0正式发布
介绍 MicroApp是由京东前端团队推出的一款微前端框架,它从组件化的思维,基于类WebComponent进行微前端的渲染,旨在降低上手难度、提升工作效率。MicroApp无关技术栈,也不和业务绑定,可以用于任何前端框架。 源码地址…...
多个子div在父中垂直居中
在一个div下,有多个子div,且子div都是水平垂直居中 <template><div><div class"far"><!-- 注意需要多包裹一层 --><div><div class"son1">1</div><div class"son2">222…...

[C国演义] 第十五章
第十五章 最长湍流子数组环绕字符串中唯⼀的⼦字符串 最长湍流子数组 力扣链接 子数组 ⇒ dp[i]的含义: 以arr[i] 结尾的所有子数组中的最长湍流子数组的长度 子数组 ⇒ 状态转移方程根据 最后一个位置来划分👇👇👇 初始化: 都初始化为…...

Docker Compose和Consul
目录 Docker-compose Docker-compose 简介 YAML 文件格式及编写注意事项 Docker Compose配置常用字段 Docker Compose 常用命令 Docker Compose 文件结构 compose 部署 Docker Compose 环境安装 准备依赖文件 编写配置文件docker-compose.yml Consul consul 部署 c…...

Wireshark新手小白基础使用方法
一、针对IP抓取 1、过滤格式: (1)、ip.src eq x.x.x.x (2)、ip.dst eq x.x.x.x (3)ip.src eq x.x.x.x or ip.dst eq x.x.x.x 二、针对端口过滤 1、过滤格式: (1&a…...
互动设计:深入了解用户体验的关键
交互是人与计算机系统之间的互动过程。在计算机领域中,交互是人机交互技术的核心内容之一。交互设计是一种基于人类行为科学、心理学、人体工程学等领域的专业设计,目的是创造用户友好的、易于使用的计算机软件、网络、移动应用等。交互的本质在于用户的…...

maven的坐标元素
maven的坐标:使用三个向量在Maven仓库中唯一的定位到一个jar包 * groupId:公司或组织的ID * artifactId:一个项目或者是项目中的一个模块的ID * version:版本号 <groupId>com.gz.maven</groupId> <artifactId&…...
蓝桥杯 题库 简单 每日十题 day13
01 乘积尾零 题目描述 本题为填空题,只需要算出结果后,在代码中使用输出语句将 所填结果输出即可。如下的10行数据,每行有10个整数,请你求出它们的乘积的末尾有多少个零? 5650 4542 3554 473 946 4114 3871 9073 90 …...

联想G50笔记本直接使用F键功能(F1~F12)需要在BIOS设置关闭热键功能可以这样操作!
如果开启启用热键模式按F1就会出现FnF1的效果,不喜欢此方式按键的用户可以进入BIOS设置界面停用热键模式即可。 停用热键模式方法如下: 1、重新启动笔记本电脑,当笔记本电脑屏幕出现Lenovo标识的时候,立即按FnF2进入BIOS设置界面…...

PangoDesign Suite与Modelsim协同仿真:从库编译到实战排错全解析
1. 为什么需要PangoDesign Suite与Modelsim协同仿真 第一次接触FPGA仿真时,我也被各种专业术语绕晕了。直到某次项目出现时序问题,才发现仿真工具就像汽车的"安全气囊"——平时感觉不到存在,关键时刻能救命。PangoDesign Suite&…...

保姆级教程:将LabelImg标注的VOC数据一键转为Ultralytics RT-DETR训练格式
从VOC到RT-DETR:零基础完成目标检测数据格式转换实战 当你第一次尝试用Ultralytics框架训练RT-DETR模型时,最令人头疼的往往不是模型调参,而是数据准备阶段——特别是当你的标注数据还停留在LabelImg生成的VOC格式(XML文件&#x…...

5步掌握Beyond Compare 5逆向工程:RSA加密破解与密钥生成实战
5步掌握Beyond Compare 5逆向工程:RSA加密破解与密钥生成实战 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen 软件授权逆向工程是信息安全领域的重要研究方向,通过分析Be…...

VSCode调试STM32实战:解决Cortex-Debug插件配置JLink/OpenOCD时最常见的5个报错
VSCode调试STM32实战:破解Cortex-Debug插件五大经典报错 当你在深夜赶工STM32项目,按下F5期待调试器顺利启动时,终端却弹出鲜红的错误信息——这种挫败感每个嵌入式开发者都深有体会。本文不重复那些基础配置教程,而是直击VSCode…...

PTA数据结构实战:层次遍历巧解二叉树叶结点输出
1. 从问题理解到解题思路 第一次看到PTA上这道二叉树题目时,我也被题目描述唬住了。题目要求按从上到下、从左到右的顺序输出所有叶结点,这不就是典型的层次遍历(BFS)应用场景吗?但仔细分析输入格式后,我发…...

10个UTF8-CPP最佳实践:让你的C++ Unicode处理更高效
10个UTF8-CPP最佳实践:让你的C Unicode处理更高效 【免费下载链接】utfcpp UTF-8 with C in a Portable Way 项目地址: https://gitcode.com/gh_mirrors/ut/utfcpp UTF8-CPP是一个轻量级的C库,提供了便捷的UTF-8编码和解码功能,帮助开…...
如何用TranslucentTB实现Windows任务栏透明化:完整配置指南与性能优化
如何用TranslucentTB实现Windows任务栏透明化:完整配置指南与性能优化 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB Window…...

如何一键修复Windows系统依赖问题:VisualCppRedist AIO终极解决方案指南
如何一键修复Windows系统依赖问题:VisualCppRedist AIO终极解决方案指南 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经遇到过打开游戏或…...

宝塔面板 SyntaxError: invalid syntax 报错 完美修复教程
宝塔面板 SyntaxError: invalid syntax 报错 完美修复教程 一、故障现象 宝塔面板版本:11.7.0 系统:Debian GNU/Linux 10 (buster) x86_64 Python3.7.9 访问网站列表/站点管理报错: SyntaxError: invalid syntax /www/server/panel/class/pan…...

企业级AI智能体评测平台AgentLab:构建、评估与部署实战指南
1. 项目概述:当AI遇上企业级自动化最近在折腾企业级自动化流程时,发现了一个非常有意思的开源项目,叫AgentLab。它来自大名鼎鼎的ServiceNow,没错,就是那个做IT服务管理(ITSM)和企业工作流平台的…...