(五)物质导数与空间时间导数
本文内容主要包括:
1. 物质导数与空间时间导数及二者的联系
考虑运动变形过程中代表性物质点的物理量 Φ\bold\PhiΦ(张量) 随时间的变化率。
- 在物质描述中,Φ\bold\PhiΦ 以 (X⃗,t)(\vec{X},t)(X,t) 为自变量;
- 在空间描述中,Φ\bold\PhiΦ 以 (x⃗,t)(\vec{x},t)(x,t) 为自变量。
物理量 Φ\bold \PhiΦ 随某一固定的物质点一起运动的时间变化率(称作:物质导数)可写作:
DΦDt=(∂Φ(X⃗,t)∂t)∣X⃗≜Φ∙\dfrac{D\bold \Phi}{Dt} =\left. \left(\frac{\partial \bold\Phi(\vec{X},t)}{\partial t}\right)\right|_{\vec X} \triangleq \overset{\bullet}{\bold\Phi}DtDΦ=(∂t∂Φ(X,t))X≜Φ∙
物理量 Φ\bold \PhiΦ 在某一固定的空间坐标上的时间变化率(称作:空间时间导数/局部导数)可写作:
(∂Φ(x⃗,t)∂t)∣x⃗≜Φ′\left. \left(\frac{\partial \bold\Phi(\vec{x},t)}{\partial t}\right)\right|_{\vec x} \triangleq \bold\Phi'(∂t∂Φ(x,t))x≜Φ′
根据复合函数的求导法则可推出:
Φ∙={∂Φ[x⃗(X⃗,t),t]∂t}∣X⃗=(∂Φ∂t)∣x⃗+(∂Φ∂xr)(∂xr∂t)∣X⃗=Φ′+(∂Φ∂xr⊗g⃗r)⋅(g⃗s∂xs∂t)∣X⃗=Φ′+(Φ▽)⋅(∂x⃗∂t)∣X⃗=Φ′+(Φ▽)⋅(∂u⃗∂t)=Φ′+(Φ▽)⋅v⃗=Φ′+v⃗⋅(▽Φ)\begin{aligned} & \overset{\bullet}{\bold\Phi} =\left. \left\{\frac{\partial \bold\Phi[\vec{x}(\vec{X},t),t]}{\partial t}\right\}\right|_{\vec X} \\\\ &\quad=\left.\left(\dfrac{\partial\bold\Phi}{\partial t}\right)\right|_{\vec{x}}+\left(\dfrac{\partial\bold\Phi}{\partial {x}^r}\right)\left.\left(\dfrac{\partial x^r}{\partial t}\right)\right|_{\vec{X}}\\\\ &\quad=\bold\Phi'+\left(\dfrac{\partial\bold\Phi}{\partial {x}^r}\otimes\vec{g}\ ^r\right)\cdot\left.\left(\vec{g}_s\dfrac{\partial x^s}{\partial t}\right)\right|_{\vec{X}}\\\\ &\quad=\bold\Phi'+\left(\bold\Phi\triangledown\right)\cdot\left.\left(\dfrac{\partial\vec x}{\partial t}\right)\right|_{\vec{X}}\\\\ &\quad=\bold\Phi'+\left(\bold\Phi\triangledown\right)\cdot\left(\dfrac{\partial\vec u}{\partial t}\right)\\\\ &\quad=\bold\Phi'+\left(\bold\Phi\triangledown\right)\cdot\vec{v}\\\\ &\quad=\bold\Phi'+\vec{v}\cdot\left(\triangledown\bold\Phi\right) \end{aligned}Φ∙={∂t∂Φ[x(X,t),t]}X=(∂t∂Φ)x+(∂xr∂Φ)(∂t∂xr)X=Φ′+(∂xr∂Φ⊗g r)⋅(gs∂t∂xs)X=Φ′+(Φ▽)⋅(∂t∂x)X=Φ′+(Φ▽)⋅(∂t∂u)=Φ′+(Φ▽)⋅v=Φ′+v⋅(▽Φ)
2. 空间坐标系相关量的物质导数
2.1. 空间坐标系基矢的物质导数
随时间变化,某一固定物质点将映射至空间坐标系中的不同位置。因此,“空间坐标系基矢的物质导数”是指:某一物质点所在处的基矢变化率。故
g⃗i∙=(g⃗i)′+v⃗⋅▽g⃗i=v⃗⋅▽g⃗i=vj∂g⃗i∂xj=vjΓijkg⃗k=vjΓij,kg⃗k\overset{\bullet}{\vec{g}_i} =(\vec{g}_i)'+\vec{v}\cdot\triangledown\vec{g}_i =\vec{v}\cdot\triangledown\vec{g}_i =v^j\dfrac{\partial \vec{g}_i}{\partial x^j} =v^j\Gamma_{ij}^k\vec{g}_k =v^j\Gamma_{ij,k}\vec{g}^kgi∙=(gi)′+v⋅▽gi=v⋅▽gi=vj∂xj∂gi=vjΓijkgk=vjΓij,kgk
式中,Γijk、Γij,k\Gamma_{ij}^k、\Gamma_{ij,k}Γijk、Γij,k 分别为空间坐标系的第二类、第一类 Christoffel 符号。又由于
DDt(g⃗i⋅g⃗j)=g⃗i∙⋅g⃗j+g⃗i⋅g⃗j∙=0⟹g⃗i⋅g⃗j∙=−g⃗i∙⋅g⃗j\dfrac{D}{Dt}(\vec{g}_i\cdot\vec{g}^j) =\overset{\bullet}{\vec{g}_i}\cdot\vec{g}^j+\vec{g}_i\cdot\overset{\bullet}{\vec{g}^j} =0 \Longrightarrow \vec{g}_i\cdot\overset{\bullet}{\vec{g}^j}=-\overset{\bullet}{\vec{g}_i}\cdot\vec{g}^jDtD(gi⋅gj)=gi∙⋅gj+gi⋅gj∙=0⟹gi⋅gj∙=−gi∙⋅gj
令 g⃗j∙=βijg⃗i\overset{\bullet}{\vec{g}^j}=\beta^j_i\vec{g}^igj∙=βijgi ,那么:
g⃗i⋅βkjg⃗k=βij=−g⃗i∙⋅g⃗j=−vkΓikj\vec{g}_i\cdot\beta^j_k\vec{g}^k =\beta^j_i =-\overset{\bullet}{\vec{g}_i}\cdot\vec{g}^j =-v^k\Gamma^j_{ik}gi⋅βkjgk=βij=−gi∙⋅gj=−vkΓikj
故,
g⃗j∙=−vkΓikjg⃗i\overset{\bullet}{\vec{g}^j}=-v^k\Gamma^j_{ik}\vec{g}^igj∙=−vkΓikjgi
2.2. 空间坐标系协变基矢混合积的 g\sqrt{g}g 的物质导数
由空间坐标系基矢的物质导数可知:
gij∙=g⃗i∙⋅g⃗j+g⃗i⋅g⃗j∙=vr(Γirkgkj+Γjrkgki)=vr(Γir,j+Γjr,i)\overset{\bullet}{g_{ij}} =\overset{\bullet}{\vec{g}_i}\cdot\vec{g}_j+\vec{g}_i\cdot\overset{\bullet}{\vec{g}_j} =v^r(\Gamma^k_{ir}g_{kj}+\Gamma^k_{jr}g_{ki}) =v^r(\Gamma_{ir,j}+\Gamma_{jr,i})gij∙=gi∙⋅gj+gi⋅gj∙=vr(Γirkgkj+Γjrkgki)=vr(Γir,j+Γjr,i)
由于,
1det([A])[A∗]=[A]−1\dfrac{1}{det([A])}[A^*]=[A]^{-1}det([A])1[A∗]=[A]−1
其中,[A∗][A^*][A∗] 为 [A][A][A] 的伴随矩阵。则
1g∂g∂gji=gij,g=det(gij)\dfrac{1}{g}\dfrac{\partial g}{\partial g_{ji}}=g^{ij},g=det(g_{ij})g1∂gji∂g=gij,g=det(gij)
故,det(gij)det(g_{ij})det(gij) 的物质导数为:
g∙=∂g∂gjigji∙=ggijgji∙=gvr(Γiri+Γjrj)=2gvrΓiri\overset{\bullet}{g} =\dfrac{\partial g}{\partial g_{ji}}\overset{\bullet}{g_{ji}} =gg^{ij}\overset{\bullet}{g_{ji}} =gv^r(\Gamma_{ir}^i+\Gamma_{jr}^j) =2gv^r\Gamma_{ir}^ig∙=∂gji∂ggji∙=ggijgji∙=gvr(Γiri+Γjrj)=2gvrΓiri
式中,Γiri\Gamma_{ir}^iΓiri 为空间坐标系的第二类Christoffel 符号。进一步:
g∙=gvrΓiri\overset{\bullet}{\sqrt{g}}=\sqrt gv^r\Gamma_{ir}^ig∙=gvrΓiri
上式也可利用第二类Christoffel符号与协变基矢的混合积 g\sqrt{g}g 的关系与物质导数和局部导数的关系得到:
g∙=v⃗⋅(▽g)=vi∂g∂xi=gvrΓiri\overset{\bullet}{\sqrt{g}} =\vec{v}\cdot(\triangledown\sqrt{g}) =v^i\dfrac{\partial \sqrt{g}}{\partial x^i} =\sqrt gv^r\Gamma_{ir}^ig∙=v⋅(▽g)=vi∂xi∂g=gvrΓiri
3. 随体坐标系 {XA,t}\{X^A,t\}{XA,t} 相关量的物质导数
3.1. 随体坐标系 {XA,t}\{X^A,t\}{XA,t} 基矢的物质导数
随时间的变化,特定的物质点在随体坐标系 {XA,t}\{X^A,t\}{XA,t} 中的基矢不断改变。其协变基矢的变化率可写作:
C⃗A∙=[∂∂t(∂x⃗∂XA)]∣X⃗=[∂∂XA(∂x⃗∂t)]∣X⃗=∂∂XA(∂u⃗∂t)=∂v⃗∂XA=vB∣∣AC⃗B=∂v⃗∂xi∂xi∂XA=x,Ai∂v⃗∂xi=x,Aivj∣ig⃗j\begin{aligned} &\overset{\bullet}{\vec{C}_A} =\left.\left[\dfrac{\partial}{\partial t}\left(\dfrac{\partial \vec{x}}{\partial X^A}\right)\right]\right|_{\vec{X}} =\left.\left[\dfrac{\partial}{\partial X^A}\left(\dfrac{\partial \vec{x}}{\partial t}\right)\right]\right|_{\vec{X}} \\\ \\ &\quad\ =\dfrac{\partial}{\partial X^A}\left(\dfrac{\partial \vec{u}}{\partial t}\right) =\dfrac{\partial\vec{v}}{\partial X^A} =v^B||_A\vec{C}_B \\\ \\ &\quad\ =\dfrac{\partial\vec{v}}{\partial x^i}\dfrac{\partial x^i}{\partial X^A} =x^i_{,A}\dfrac{\partial\vec{v}}{\partial x^i} =x^i_{,A}v^j|_i\vec{g}_j \end{aligned} CA∙=[∂t∂(∂XA∂x)]X=[∂XA∂(∂t∂x)]X =∂XA∂(∂t∂u)=∂XA∂v=vB∣∣ACB =∂xi∂v∂XA∂xi=x,Ai∂xi∂v=x,Aivj∣igj
同理可知
C⃗A∙∙=∂a⃗∂XA=aB∣∣AC⃗B\overset{\bullet\bullet}{\vec{C}_A} =\dfrac{\partial\vec{a}}{\partial X^A} =a^B||_A\vec{C}_BCA∙∙=∂XA∂a=aB∣∣ACB
又
DC⃗A⋅C⃗BDt=C⃗A∙⋅C⃗B+C⃗A⋅C⃗B∙=0\dfrac{D{\vec{C}_A\cdot\vec{C}^B}}{Dt} =\overset{\bullet}{\vec{C}_A}\cdot\vec{C}^B+{\vec{C}_A}\cdot\overset{\bullet}{\vec{C}^B} =0DtDCA⋅CB=CA∙⋅CB+CA⋅CB∙=0
故
C⃗A∙=−(C⃗B∙⋅C⃗A)C⃗B=−vA∣∣BC⃗B=−X,jAvj∣ig⃗i\overset{\bullet}{\vec{C}^A} =-(\overset{\bullet}{\vec{C}_B}\cdot\vec{C}^A)\vec{C}^B =-v^A||_B\vec{C}^B =-X^A_{,\ j}v^j|_i\vec{g}^iCA∙=−(CB∙⋅CA)CB=−vA∣∣BCB=−X, jAvj∣igi
3.2. 随体坐标系 {XA,t}\{X^A,t\}{XA,t} 协变基矢混合积的 C\sqrt{C}C 的物质导数
C∙AB=C⃗∙A⋅C⃗B+C⃗A⋅C⃗∙B=vB∣∣A+vA∣∣B\overset{\bullet}{C}_{AB} =\overset{\bullet}{\vec C}_{A}\cdot{\vec C}_{B}+\vec{C}_A\cdot\overset{\bullet}{\vec C}_{B} =v_B||_A+v_A||_BC∙AB=C∙A⋅CB+CA⋅C∙B=vB∣∣A+vA∣∣B
又
1C∂C∂CBA=C−1AB,C=det(CAB)\dfrac{1}{C}\dfrac{\partial C}{\partial C_{BA}}=\overset{-1}{C}\ ^{AB},C=det(C_{AB})C1∂CBA∂C=C−1 AB,C=det(CAB)
则
C∙=∂C∂CBAC∙AB=CC−1ABC∙AB=C(vA∣∣A+vB∣∣B)=2CvA∣∣A\overset{\bullet}{C} =\dfrac{\partial C}{\partial C_{BA}}\overset{\bullet}{C}_{AB} =C\overset{-1}{C}\ ^{AB}\overset{\bullet}{C}_{AB} =C(v^A||_A+v^B||_B) =2Cv^A||_AC∙=∂CBA∂CC∙AB=CC−1 ABC∙AB=C(vA∣∣A+vB∣∣B)=2CvA∣∣A
进一步知:
C∙=12CC∙=CvA∣∣A\overset{\bullet}{\sqrt C} =\dfrac{1}{2\sqrt C}\overset{\bullet}{C} =\sqrt Cv^A||_AC∙=2C1C∙=CvA∣∣A
3.3. J\mathscr{J}J 的物质导数
由于,
J=det(F)=CG\mathscr{J}=det(\bold F)=\sqrt{\dfrac{C}{G}}J=det(F)=GC
故,
J∙=C∙G=CGvA∣∣A=JvA∣∣A=J▽⋅v⃗\overset{\bullet}{\mathscr{J}} ={\dfrac{\overset{\bullet}{\sqrt C}}{\sqrt G}} =\dfrac{\sqrt C}{\sqrt G}v^A||_A =\mathscr{J}v^A||_A =\mathscr{J}\triangledown\cdot\vec{v}J∙=GC∙=GCvA∣∣A=JvA∣∣A=J▽⋅v
4. 任意张量在空间坐标系与随体坐标系 {XA,t}\{X^A,t\}{XA,t} 中的物质导数
以三阶张量为例:
Φ=Φ∙∙kijg⃗i⊗g⃗j⊗g⃗k=Φ∙∙MABC⃗A⊗C⃗B⊗C⃗M\bold\Phi =\varPhi^{ij}_{\bullet\bullet k}\ \vec{g}_i\otimes\vec{g}_j\otimes\vec{g}^k =\varPhi^{AB}_{\bullet\bullet M}\ \vec{C}_A\otimes\vec{C}_B\otimes\vec{C}^MΦ=Φ∙∙kij gi⊗gj⊗gk=Φ∙∙MAB CA⊗CB⊗CM
则
Φ∙=Φ∙∙∙MABC⃗A⊗C⃗B⊗C⃗M+Φ∙∙MABC⃗A∙⊗C⃗B⊗C⃗M+Φ∙∙MABC⃗A⊗C⃗B∙⊗C⃗M+Φ∙∙MABC⃗A⊗C⃗B⊗C⃗∙M=(Φ∙∙∙MAB+Φ∙∙MNBvA∣∣N+Φ∙∙MANvB∣∣N−Φ∙∙NABvN∣∣M)C⃗A⊗C⃗B⊗C⃗M\begin{aligned} &\overset{\bullet}{\bold\Phi} =\overset{\bullet}{\varPhi}\ ^{AB}_{\bullet\bullet M}\ \vec{C}_A\otimes\vec{C}_B\otimes\vec{C}^M +\varPhi^{AB}_{\bullet\bullet M}\ \overset{\bullet}{\vec{C}_A}\otimes\vec{C}_B\otimes\vec{C}^M +\varPhi^{AB}_{\bullet\bullet M}\ \vec{C}_A\otimes\overset{\bullet}{\vec{C}_B}\otimes\vec{C}^M +\varPhi^{AB}_{\bullet\bullet M}\ \vec{C}_A\otimes\vec{C}_B\otimes\overset{\bullet}{\vec{C}}\ ^M \\\\ &\ \ \ =(\overset{\bullet}{\varPhi}\ ^{AB}_{\bullet\bullet M}+\varPhi^{NB}_{\bullet\bullet M}\ v^A||_N+\varPhi^{AN}_{\bullet\bullet M}\ v^B||_N-\varPhi^{AB}_{\bullet\bullet N}\ v^N||_M)\ \vec{C}_A\otimes\vec{C}_B\otimes\vec{C}^M \end{aligned}Φ∙=Φ∙ ∙∙MAB CA⊗CB⊗CM+Φ∙∙MAB CA∙⊗CB⊗CM+Φ∙∙MAB CA⊗CB∙⊗CM+Φ∙∙MAB CA⊗CB⊗C∙ M =(Φ∙ ∙∙MAB+Φ∙∙MNB vA∣∣N+Φ∙∙MAN vB∣∣N−Φ∙∙NAB vN∣∣M) CA⊗CB⊗CM
或
Φ∙=Φ∙∙∙kijg⃗i⊗g⃗j⊗g⃗k+Φ∙∙kijg⃗∙i⊗g⃗j⊗g⃗k+Φ∙∙kijg⃗i⊗g⃗∙j⊗g⃗k+Φ∙∙kijg⃗i⊗g⃗j⊗g⃗∙k=(Φ∙∙∙kij+Φ∙∙ksjvrΓrsi+Φ∙∙kisvrΓrsj−Φ∙∙sijvrΓrks)g⃗i⊗g⃗j⊗g⃗k=[(Φ∙∙kij)′+(vrΦ∙∙k,rij+Φ∙∙ksjvrΓrsi+Φ∙∙kisvrΓrsj−Φ∙∙sijvrΓrks)]g⃗i⊗g⃗j⊗g⃗k=[(Φ∙∙kij)′+vrΦ∙∙kij∣r)]g⃗i⊗g⃗j⊗g⃗k=Φ′+v⃗⋅▽Φ\begin{aligned} &\overset{\bullet}{\bold\Phi} =\overset{\bullet}{\varPhi}\ ^{ij}_{\bullet\bullet k}\ \vec{g}_i\otimes\vec{g}_j\otimes\vec{g}^k +\varPhi^{ij}_{\bullet\bullet k}\ \overset{\bullet}{\vec{g}}_i\otimes\vec{g}_j\otimes\vec{g}^k +\varPhi^{ij}_{\bullet\bullet k}\ \vec{g}_i\otimes\overset{\bullet}{\vec{g}}_j\otimes\vec{g}^k +\varPhi^{ij}_{\bullet\bullet k}\ \vec{g}_i\otimes\vec{g}_j\otimes\overset{\bullet}{\vec{g}}\ ^k \\\\ &\ \ \ =(\overset{\bullet}{\varPhi}\ ^{ij}_{\bullet\bullet k}+{\varPhi}\ ^{sj}_{\bullet\bullet k}v^r\Gamma^i_{rs}+{\varPhi}\ ^{is}_{\bullet\bullet k}v^r\Gamma^j_{rs}-{\varPhi}\ ^{ij}_{\bullet\bullet s}v^r\Gamma^s_{rk})\ \vec{g}_i\otimes\vec{g}_j\otimes\vec{g}^k \\\\ &\ \ \ =[({\varPhi}\ ^{ij}_{\bullet\bullet k})'+(v^r{\varPhi}\ ^{ij}_{\bullet\bullet k,r}+{\varPhi}\ ^{sj}_{\bullet\bullet k}v^r\Gamma^i_{rs}+{\varPhi}\ ^{is}_{\bullet\bullet k}v^r\Gamma^j_{rs}-{\varPhi}\ ^{ij}_{\bullet\bullet s}v^r\Gamma^s_{rk})]\ \vec{g}_i\otimes\vec{g}_j\otimes\vec{g}^k \\\\ &\ \ \ =[({\varPhi}\ ^{ij}_{\bullet\bullet k})'+v^r{\varPhi}\ ^{ij}_{\bullet\bullet k}|_r)]\ \vec{g}_i\otimes\vec{g}_j\otimes\vec{g}^k \\\\ &\ \ \ =\bold\Phi'+\vec{v}\cdot\triangledown\bold\Phi \end{aligned}Φ∙=Φ∙ ∙∙kij gi⊗gj⊗gk+Φ∙∙kij g∙i⊗gj⊗gk+Φ∙∙kij gi⊗g∙j⊗gk+Φ∙∙kij gi⊗gj⊗g∙ k =(Φ∙ ∙∙kij+Φ ∙∙ksjvrΓrsi+Φ ∙∙kisvrΓrsj−Φ ∙∙sijvrΓrks) gi⊗gj⊗gk =[(Φ ∙∙kij)′+(vrΦ ∙∙k,rij+Φ ∙∙ksjvrΓrsi+Φ ∙∙kisvrΓrsj−Φ ∙∙sijvrΓrks)] gi⊗gj⊗gk =[(Φ ∙∙kij)′+vrΦ ∙∙kij∣r)] gi⊗gj⊗gk =Φ′+v⋅▽Φ
相关文章:
物质导数与空间时间导数)
(五)物质导数与空间时间导数
本文内容主要包括:1. 物质导数与空间时间导数及二者的联系2. 空间坐标系相关量的物质导数2.1. 空间坐标系基矢的物质导数2.2. 空间坐标系协变基矢混合积的 g\sqrt{g}g 的物质导数3. 随体坐标系 {XA,t}\{X^A,t\}{XA,t} 相关量的物质导数3.1. 随体坐标系 {XA,t}\{X^…...
)
python实战应用讲解-【语法基础篇】流程控制-运算符(附示例代码)
目录 比较运算符 相等运算符 is:相同运算符 in:成员资格运算符 字符串和序列的比较...
MXNet中使用双向循环神经网络BiRNN对文本进行情感分类
文本分类类似于图片分类,也是很常见的一种分类任务,将一段不定长的文本序列变换为文本的类别。这节主要就是关注文本的情感分析(sentiment analysis),对电影的评论进行一个正面情绪与负面情绪的分类。整理数据集第一步都是将数据集整理好&…...

SpringBoot 整合 MongoDB 6 以上版本副本集及配置 SSL / TLS 协议
续上一篇 Linux 中使用 docker-compose 部署 MongoDB 6 以上版本副本集及配置 SSL / TLS 协议 前提:此篇文章是对上一篇文章的实战和项目中相关配置的使用,我这边针对 MongoDB 原有基础上做了增强,简化了 MongoDB 配置 SSL / TLS 协议上的支…...
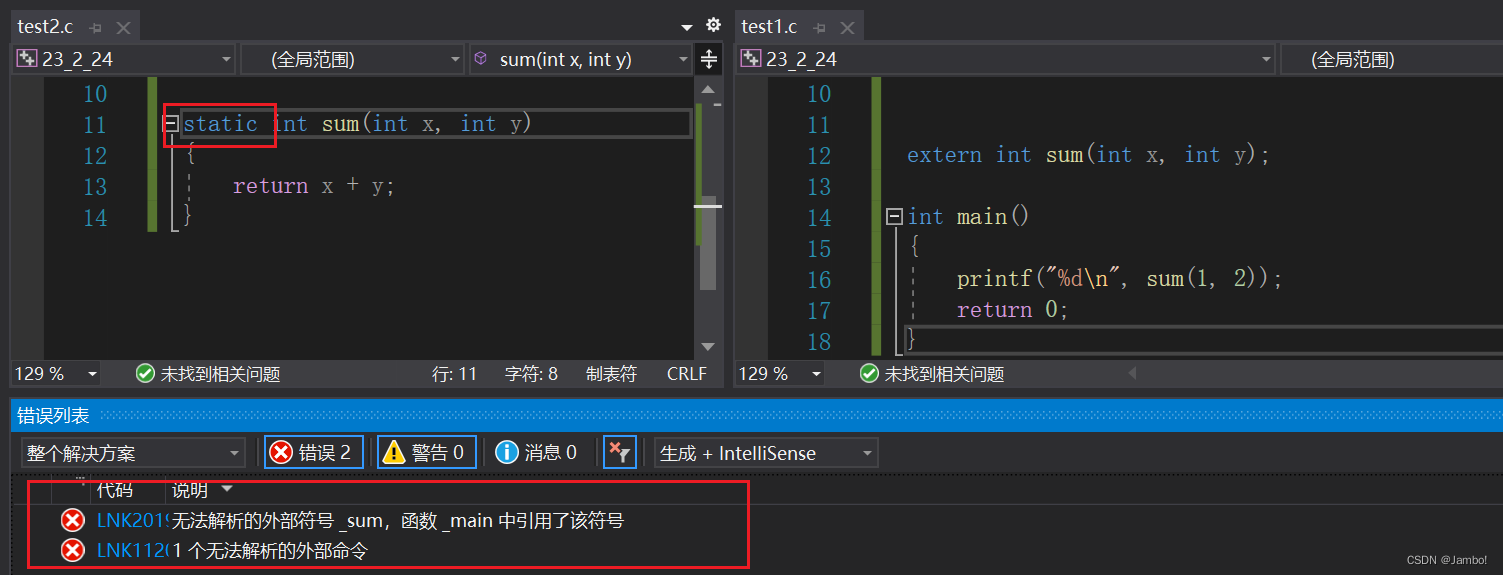
C语言static关键字
目录static修饰局部变量static修饰全局变量static修饰函数static是C语言的关键字,它有静态的意思static的三种用法:修饰局部变量修饰全局变量修饰函数 static修饰局部变量 我们先看一个程序: void print() {int a 0;a;printf("%d\n&…...

【华为OD机试模拟题】用 C++ 实现 - 单词接龙(2023.Q1)
最近更新的博客 【华为OD机试模拟题】用 C++ 实现 - 货币单位换算(2023.Q1) 【华为OD机试模拟题】用 C++ 实现 - 选座位(2023.Q1) 【华为OD机试模拟题】用 C++ 实现 - 停车场最大距离(2023.Q1) 【华为OD机试模拟题】用 C++ 实现 - 重组字符串(2023.Q1) 【华为OD机试模…...
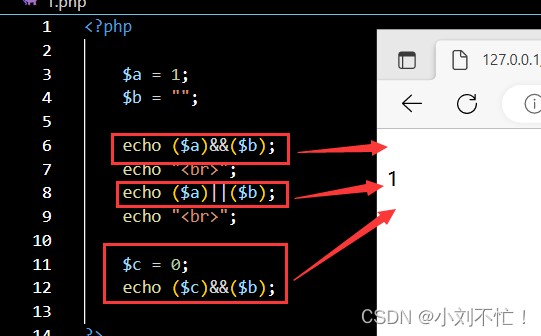
PHP基础(2)
PHP基础常用函数数组及多维数组数组遍历强制类型转换运算符赋值与基本运算字符串运算逻辑运算符常用函数 substr的用法是:substr(目标字符串,从字符串的哪个位置开始,然后返回往后的几个字符)strchr的用法是࿱…...
新特性)
Java8(JDK1.8)新特性
一、Java8(JDK1.8)新特性 1、Lamdba表达式 2、函数式接口 3、方法引用和构造引用 4、Stream API 5、接口中的默认方法和静态方法 6、新时间日期API 7、OPtional 8、其他特性 二、java8(JDK1.8)新特性简介 1、速度快; 2、代码少、简…...

【C语言】指针的定义和使用
指针一、什么是指针二、指针类型三、指针和数组的关系四、空指针五、野指针一、什么是指针 指针(Pointer)是编程语言中的一个对象,通过地址直接指向内存中该地址的值。由于通过地址能够找到所需的变量存储单元,可以说地址指向该变…...

Parameter ‘zpspid‘ not found
异常:nested exception is org.apache.ibatis.binding.BindingException: Parameter testypid not found. Available parameters are [ztpsXmjcxx, pageable, param1, param2]分析:以为是xml文件中没有对应的字段,一细看了几遍是有这个字段的…...
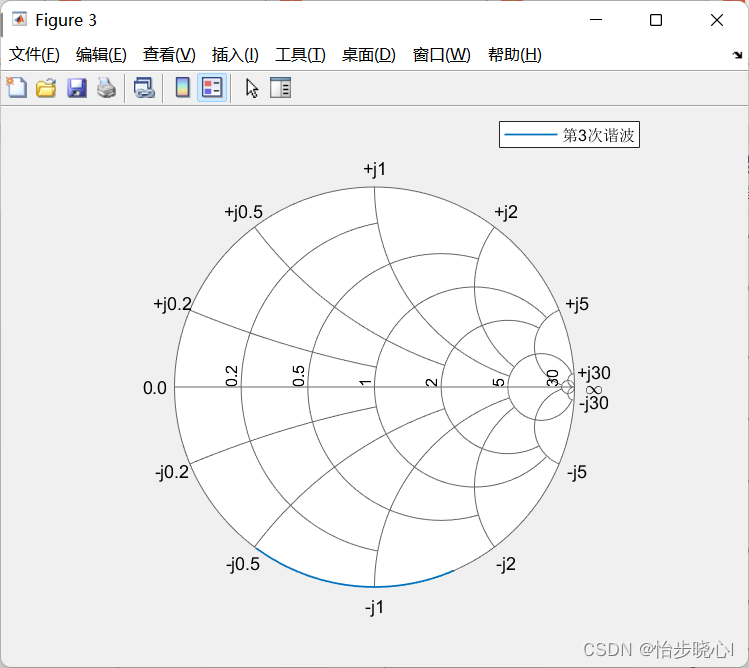
23、高自由度下的E类波形理论计算(附Matlab代码)
23、高自由度下的E类波形理论计算(附Matlab代码) 0、代码 任意占空比、电压导数条件下的E类波形与阻抗条件计算Matlab 注意修改路径,我这边是:!!!!!!&#…...
软件测试:用“bug”来表示“在电脑程序里的错误”
计算机基础知识计算机(personal computer)俗称电脑(pc),是现代一种用于高速计算的电子机器,可以进行数值计算,又可以进行逻辑判断,还具有存储记忆功能,且能够按照程序的运…...

Git命令
git init # 初始化本地git仓库(创建新仓库)git config --global user.name "xxx" # 配置用户名git config --global user.email "xxxxxx.com" # 配置邮件git config --global color.ui true # git status等命令自动着色git config -…...

Java的异常概念和类型
Java是一种流行的编程语言,拥有强大的异常处理机制,以帮助开发人员在程序出现异常时更好地处理错误情况。本文将介绍Java异常的概念和类型。异常的概念在Java中,异常是指在程序运行时发生的错误或异常情况。例如,当程序试图打开不…...

【Leedcode】环形链表必备的面试题和证明题(附图解)
环形链表必备的面试题和证明题(附图解) 文章目录环形链表必备的面试题和证明题(附图解)前言一、第一题1.题目2.思路3.代码4.延伸问题(1)证明题一:(2)证明题二:二、第二题1.题目2.思路延伸的证明题总结前言 …...

Vulnhub靶场----7、DC-7
文章目录一、环境搭建二、渗透流程三、思路总结一、环境搭建 DC-7下载地址:https://download.vulnhub.com/dc/DC-7.zip kali:192.168.144.148 DC-7:192.168.144.155 二、渗透流程 nmap -T5 -A -p- -sV -sT 192.168.144.155思路: …...
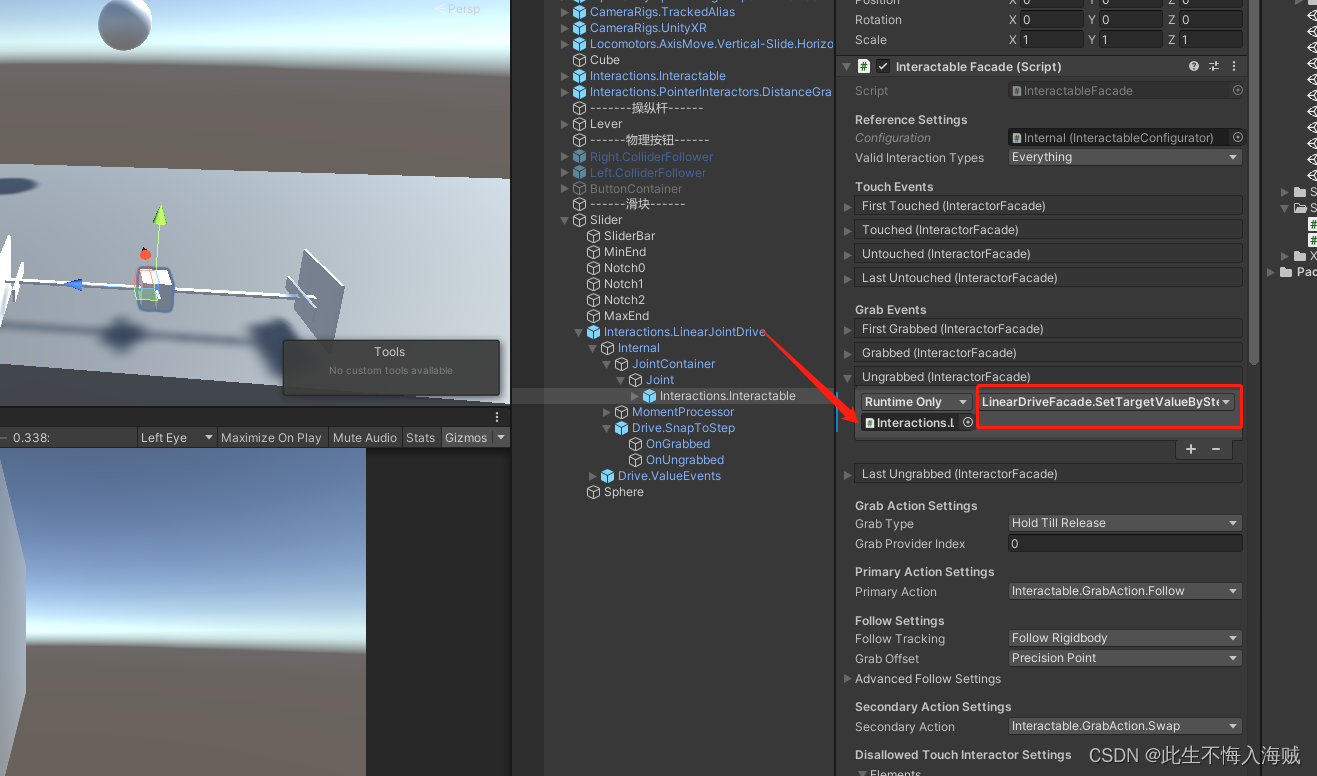
【Unity VR开发】结合VRTK4.0:创建滑块
语录: 只有经历地狱般的磨练,才能炼出创造天堂的力量。 前言: 滑块是一个非常简单的控件,它允许通过沿有限的驱动轴滑动 Interactable 来选择不同的值。我们将使用线性驱动器创建一个滑块控件,该控件允许我们根据与滑…...

Latex中的表格(2)
Latex中的表格一、一个加脚注的三线表的例子二、表格中加注释三、并排的表格3.1 使用小页环境并排表格3.2 使用子表格并排表格四、一个复杂的表格五、一个长表格这篇文章主要罗列一些特殊的表格例子。内容来自:一篇北师大学位论文模板,详见https://githu…...
输运定理)
(七)输运定理
本文主要内容包括:1. 物质积分2. 曲线上物质积分的时间变化率3. 曲面上物质积分的时间变化率4. 体积域上物质积分的时间变化率 (Reynolds 输运定理)1. 物质积分 考虑 t0t_0t0 时刻参考构型中由物质点 X⃗\vec{X}X所形成的 物质曲线 ct0c_{t_0}ct0、物质曲面 …...

ABBYYFineReader15免费电脑pdf文档文字识别软件
ABBYYFineReader是一款OCR文字识别软件,它可以对图片、文档等进行扫描识别,并将其转换为可编辑的格式,比如Word、Excel等,操作也是挺方便的。 我们在官网找到该软件并进行下载,打开软件后,选择转换为“Mic…...

广告发光字全科普
广告发光字全科普:从原理到类型,一篇看懂门头招牌的发光逻辑走在城市街头,从连锁品牌门头到商场导视、楼宇标识,随处可见夜晚自动亮起的广告发光字。它早已不是简单的霓虹灯,而是融合材料、工艺、光学与工程的成熟标识…...

Stable-Diffusion-v1-5-archive多风格生成效果:复古海报/科技感UI/手绘插画实拍
Stable Diffusion v1.5 Archive多风格生成效果:复古海报/科技感UI/手绘插画实拍 1. 模型介绍与核心能力 Stable Diffusion v1.5 Archive是经典SD1.5文生图模型的归档版本,作为AI图像生成领域的"常青树",它依然保持着强大的通用图…...

终极指南:快速掌握OpenNI2深度相机开发框架
终极指南:快速掌握OpenNI2深度相机开发框架 【免费下载链接】OpenNI2 项目地址: https://gitcode.com/gh_mirrors/op/OpenNI2 OpenNI2是一个功能强大的开源跨平台框架,专门用于深度相机和传感器设备的驱动开发与应用程序构建。这个完整的自然交互…...

3大场景×5项优化:ComfyUI视频合成VHS_VideoCombine节点全场景应用指南
3大场景5项优化:ComfyUI视频合成VHS_VideoCombine节点全场景应用指南 【免费下载链接】ComfyUI-VideoHelperSuite Nodes related to video workflows 项目地址: https://gitcode.com/gh_mirrors/co/ComfyUI-VideoHelperSuite 一、基础认知:视频合…...

Windows 11硬件限制突破与系统升级完全指南
Windows 11硬件限制突破与系统升级完全指南 【免费下载链接】MediaCreationTool.bat Universal MCT wrapper script for all Windows 10/11 versions from 1507 to 21H2! 项目地址: https://gitcode.com/gh_mirrors/me/MediaCreationTool.bat 当你的电脑因TPM 2.0或CPU世…...
开源翻译终端效果展示:Pixel Language Portal处理专业术语准确率分析
开源翻译终端效果展示:Pixel Language Portal处理专业术语准确率分析 1. 产品概览 Pixel Language Portal(像素语言跨维传送门)是一款基于腾讯Hunyuan-MT-7B核心引擎构建的创新翻译工具。与传统翻译软件不同,它将翻译过程转化为…...
Pixel Script Temple 企业知识库图解:将文档内容自动转化为像素示意图
Pixel Script Temple 企业知识库图解:将文档内容自动转化为像素示意图 1. 企业知识管理的痛点与机遇 技术文档和操作手册是企业知识管理的重要组成部分,但传统文档形式存在明显的可读性问题。密密麻麻的文字说明、复杂的流程图和晦涩的专业术语&#x…...

03 MongoDB文档的各种增加、更新、删除操作总结
更多内容请见: 《深入掌握MongoDB数据库》 - 专栏介绍和目录 一. 插入文档 注意: 在 MongoDB 中,直接插入内容会自动创建集合! 1.1 使用insert()方法 语法格式: db.COLLECTION_NAME.insert(document) 说明: 若插入的数据主键已经存在,则会抛 org.springframework.dao.Du…...

koanf命令行参数解析:高级POSIX兼容标志处理指南
koanf命令行参数解析:高级POSIX兼容标志处理指南 【免费下载链接】koanf Simple, extremely lightweight, extensible, configuration management library for Go. Supports JSON, TOML, YAML, env, command line, file, S3 etc. Alternative to viper. 项目地址:…...

【ZGC性能调优终极指南】:20年JVM专家亲授5大实战瓶颈突破法
第一章:ZGC核心机制与性能边界全景透视ZGC(Z Garbage Collector)是JDK 11引入的低延迟垃圾收集器,专为处理TB级堆内存与毫秒级停顿目标而设计。其核心突破在于并发标记、并发重定位与着色指针(Colored Pointers&#x…...