第五届芜湖机器人展,正运动助力智能装备“更快更准”更智能!
■展会名称:
第十一届中国(芜湖)科普产品博览交易会-第五届机器人展
■展会日期
2023年10月21日-23日
■展馆地点
中国ㆍ芜湖宜居国际博览中心B馆
■展位号
B029

正运动技术,作为国内领先的运动控制企业,将于2023年10月21日参加芜湖机器人展,展会将在安徽芜湖宜居国际博览中心举行,为智能装备领域的众多用户搭建一个充满创新与市场洞察的友好交流平台。
作为本次展会的参展商,正运动技术将展示全国产高性能运动控制软硬产品,涵盖x86平台实时Windows机器视觉EtherCAT运动控制器及跨平台实时运动控制等。这些前沿产品将助推智能装备领域的突破,与行业标准和实际应用需求紧密契合,深受客户高度推崇。
展会期间,我们期待与业界专家及合作伙伴深入交流、共谋未来,与您共同助力智能装备迈向更高端、更智能的新时代。

本次展会,我们将展示多款高性能运动控制产品和运动控制解决方案
01 VPLC711 — 机器视觉运动控制一体机

高性能x86平台Windows实时视觉运动控制器,开创全新智能制造!
●可选6-64轴运动控制(脉冲+EtherCAT总线);
●内置实时内核MotionRT7,支持第三方视觉软件;
●板载20路通用输入(其中10路为高速输入),20路高速输出;
●多核并行运算,能够高效处理运动控制,机器视觉等自动化设备核心任务;
●开放式IPC形态实时软控制器/软PLC,可灵活集成运动控制+视觉一体化解决方案。
高速异形插件机运动控制解决方案

方案采用XY直线运动平台、传输装置、供料装置等,以及核心控制模块,同时搭载了我司的机器视觉运动控制一体机VPLC711。
VPLC711具备多核并行运算能力,能高效处理运动控制和机器视觉等自动化设备核心任务,确保了在插件工艺中的路径规划、数据交互、元器件插装、夹持控制、工件卸载等关键步骤能够以高速高精完成。
➩应用优势:
(1)EtherCAT同步周期250us,实现多轴高速高精运动控制;
(2)力矩控制功能,精确控制夹爪的夹持力度,以防止工件损坏或松动;
(3)可通过EtherCAT进行灵活扩展,实现多轴联动,多工位协同,提升生产效率;
(4)路径规划功能,可以优化插件移动轨迹,提高插装效率和速度;
(5)视觉飞拍功能,可快速对插装元器件进行瞬时触发相机拍摄和照明;
(6)运动控制实时内核MotionRT7,实现核间交互,指令调用速度比传统的PCl/PCle快10倍,整体设备产能可提升10%左右。
➩方案架构图:

02 XPCIE1032H — 超高速PCIe EtherCAT实时运动控制卡

搭载Windows运动控制实时内核MotionRT7,完美解决传统PCI/PCle运动控制卡在Windows环境下控制系统的非实时性问题!
●可选6-64轴运动控制(脉冲+EtherCAT总线);
●8路高速输入,16路高速输出PSO,可满足半导体设备和分选机等多个独立通道的微秒级实时精准控制需求;
●内部搭载运动控制实时内核MotionRT7;
●多核并行运算,能够高效处理运动控制,机器视觉等自动化设备核心任务;
●核间交互,指令调用速度比传统的PCl/PCle快10倍,助力半导体设备高效协同工作。
半导体固晶机运动控制解决方案

方案采用了XY直线运动平台、旋转摆臂轴等核心控制部件,同时搭载了我司的超高速PCIe EtherCAT实时运动控制卡XPCIE1032H。
XPCIE1032H通过与固晶机的执行机构、视觉采集硬件等关键部件的同步协作,能够实现高速高精的控制,并进行高效的数据交互,确保固晶工艺中的取晶、搬运、粘接、压合、固化等关键步骤以高速度和高精度完成。
➩应用优势:
(1)EtherCAT同步周期250us,实现多轴高速高精运动控制;
(2)力矩控制功能,控制吸放芯片的下压力度,防止芯片压坏变形;
(3)可通过EtherCAT进行灵活扩展,实现多轴联动,多工位协同,提升生产效率;
(4)安装方便,接线便捷,安全可靠;
(5)运动控制实时内核MotionRT7,实现核间交互,指令调用速度比传统的PCl/PCle快10倍,整体设备产能可提升8%左右。
➩方案架构图:

03 ZMC408SCAN_V2 — 开放式激光振镜运动控制一体机

独立式激光振镜运动控制器,集成激光控制、振镜控制和总线轴/脉冲轴控制,助您实现高效精确的EtherCAT总线运动控制+激光振镜解决方案。
●板载4路差分脉冲轴接口+1路专用手轮接口;
●2路带反馈激光振镜接口、1路LASER和1路FIBER激光电源专用接口;
●激光振镜控制与运动控制相互融合,可灵活构建多轴联动等方式的激光加工系统;
●支持一维/二维/三维PSO功能,可做视觉飞拍、精密点胶和激光能量控制;
●板载24路通用输入和20路通用输出,其中4路高速色标锁存,4路PSO和8路PWM输出。

方案采用XYZ运动平台和XY振镜轴,搭载我司开放式激光振镜运动控制器ZMC408SCAN_V2,可实现精准调控激光能量和焊接轨迹规划,同时能够优化传统激光焊接工艺流程,从而提高加工效率和品质。
➩应用优势:
(1)振镜轴与伺服轴联动插补;
(2)灵活的激光器功率调整:可根据激光器类型及接线配置自由调整相应激光器参数;
(3)可设置加工速度和延时工艺参数,精准控制焊接过程,适应不同材料和焊接需求;
(4)支持C++、C#等多种开发方式,提供专用激光函数库及应用案例,助力设备系统商快速开发交付;
(5)螺旋线形轨迹焊接功能:通过光斑沿焊接方向高速旋转运动,实现不同焊缝深宽比,无需改变外光路条件。
➩方案架构图:

在本次展会中,我们诚邀各位领导莅临B029展位参观与指导。在展会现场,您将有机会与我们的专业服务团队近距离交流和互动,我们将共同探讨智能制造领域未来的发展趋势和新的市场增长点!
正运动技术始终以客户应用需求为中心,不断优化和完善产品与服务,为客户提供易用、高性价比、可靠的运动控制解决方案,以满足各类运动控制应用场景的需求,助力智能装备向高端化迈进。
相关文章:
第五届芜湖机器人展,正运动助力智能装备“更快更准”更智能!
■展会名称: 第十一届中国(芜湖)科普产品博览交易会-第五届机器人展 ■展会日期 2023年10月21日-23日 ■展馆地点 中国ㆍ芜湖宜居国际博览中心B馆 ■展位号 B029 正运动技术,作为国内领先的运动控制企业,将于2023年10月21日参加芜湖机…...
JVM八股文
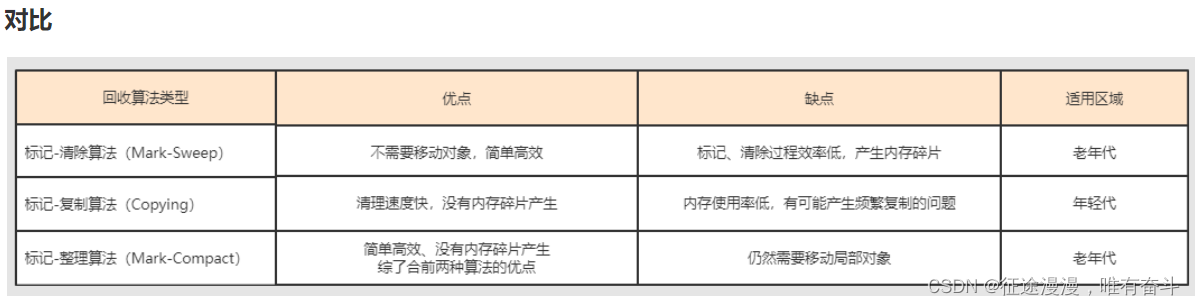
1.JVM的内存结构? 2.OOM是什么,怎么排查? 3.请解释四种引用是什么意思有什么区别? 4.GC的回收算法有哪些? 5.怎么判断对象是否存活? 1.什么是JVM内存结构 jvm将虚拟机分为5大区域,程序计数器、…...
代码随想录算法训练营第二十四天丨 回溯算法part02
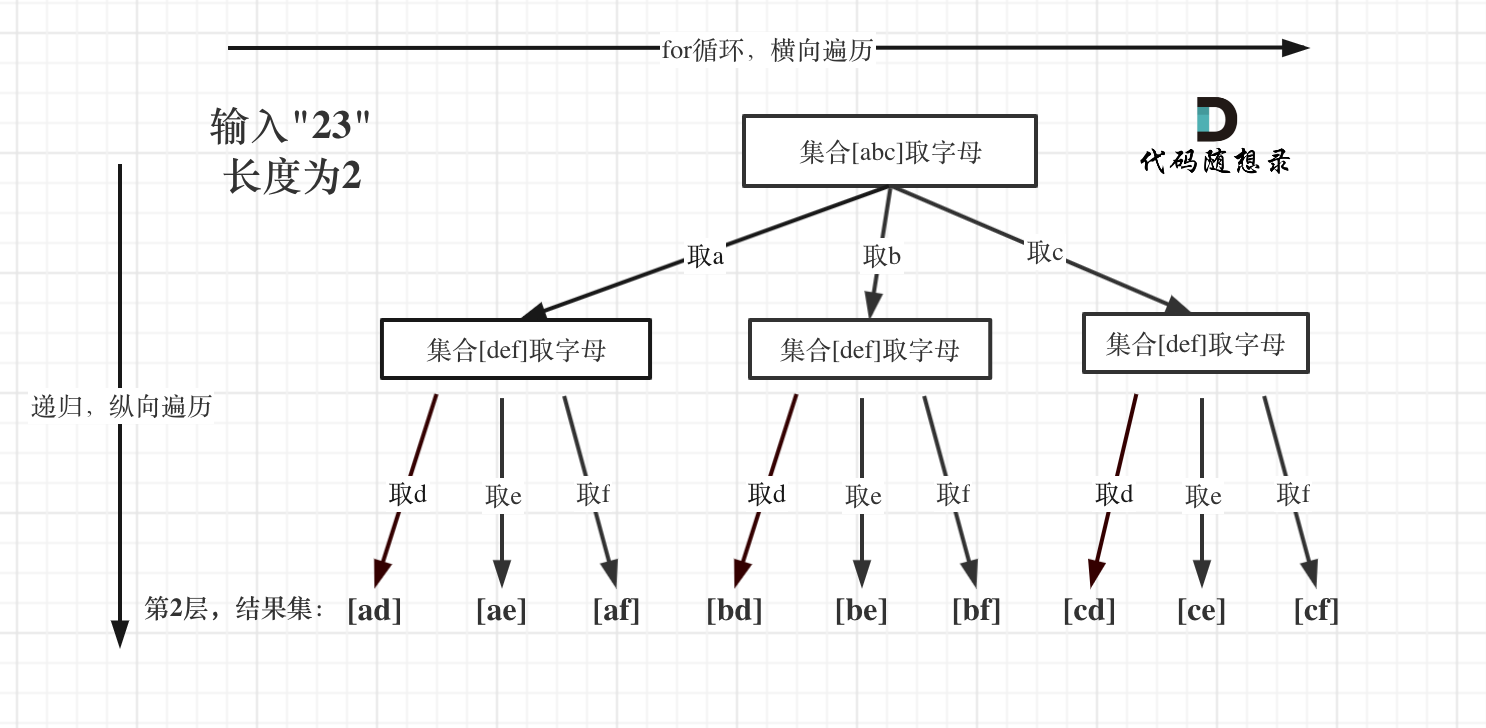
216.组合总和III 思路 本题就是在 [1,2,3,4,5,6,7,8,9] 这个集合中找到和为n的k个数的组合。 相对于77. 组合 (opens new window),无非就是多了一个限制,本题是要找到和为n的k个数的组合,而整个集合已经是固定的了[1,...,9]。 本题k相当于…...

【Python机器学习】零基础掌握AgglomerativeClustering聚类
如何解决城市规划问题? 城市规划者们面临一个复杂问题:如何合理地规划土地,使商业、居民、公园和其他设施互相便利,同时又不互相干扰?解决这个问题不仅需要对土地进行精准的分类,还要考虑到土地之间的相互关系。 借助层次聚类算法(Agglomerative Clustering),规划者…...
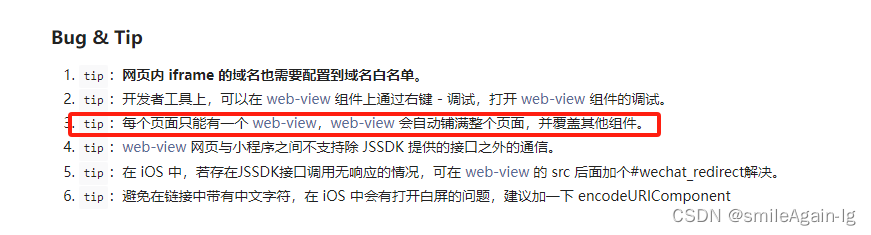
uniapp小程序中给web-view页面添加授权弹窗(使用cover-view组件覆盖实现该功能)
效果图: web-view是承载网页的容器。会自动铺满整个小程序页面,个人类型的小程序暂不支持使用。 再看下面一个提示: 每个页面只能有一个 web-view,web-view 会自动铺满整个页面,并覆盖其他组件。 也就是说,…...
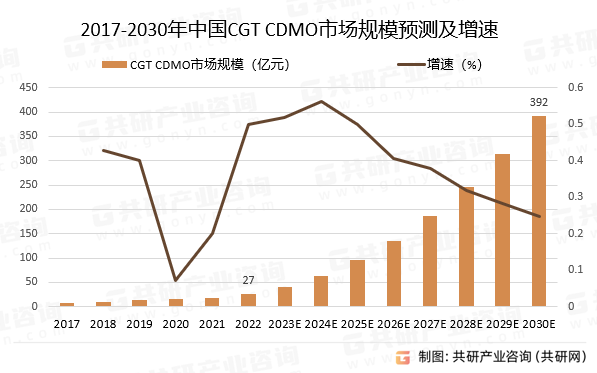
2023年全球及中国CGT CDMO市场发展现状分析:CGT 渗透率有效助力CGT CDMO快速发展[图]
与传统药物相比,CGT的外包服务更注重活体开发过程,如质粒、病毒、细胞的生产及纯化。标准化、规模化的工艺流程对最终制备的产品起到重要影响,是获取及制备能够满足临床需求的高质量CGT产品的关键。 CGT CDMO服务内容 资料来源:共…...

上抖音热搜榜需要做哪些准备?
要想在抖音上获得高曝光,首先需要了解抖音热搜榜的算法和规则。抖音热搜榜的排名主要取决于作品的点赞数、评论数、分享数和播放量。其中,播放量是影响排名的关键因素。因此,在创作作品时,要注重提高作品的播放量。此外࿰…...

LDA代码训练报错记录
1、AttributeError: ‘CountVectorizer‘ object has no attribute ‘get_feature_names‘ 代码内容: tf_feature_names tf_vectorizer.get_feature_names()报错信息 AttributeError: CountVectorizer object has no attribute get_feature_names报错解析&#…...

【吞噬星空】爽翻,徐欣喜提永恒之体,罗峰秒杀败类,阿特金磕头认错
Hello,小伙伴们,我是小郑继续为大家深度解析国漫资讯。 吞噬星空动画第89集终于更新了,阿特金三大巨头的好日子到头了,从他们对徐欣出手的那一刻,就已经有取死之道。如今罗峰强势回归,上演复仇戏码,让大家看…...

【c++】跟webrtc学状态改变
peerconn的状态看起来只是为了通知上层PeerConnectionState // See https://w3c.github.io/webrtc-pc/#dom-rtcpeerconnectionstateenum class PeerConnectionState {kNew,kConnecting,kConnected,kDisconnected,kFailed,kClosed,};static constexpr absl...
【入门】.Net Core 6 WebApi 项目搭建
一、创建项目 1.1.创建新项目:打开开发工具>创建新项目>搜索API>选择C#语言的ASP.NET Core Web API 1.2.配置新项目:**自定义项目信息以及存储路径 1.3.其他信息:这里框架必须选择.NET 6.0,其他配置默认勾选即可,也可以根…...

xtrabackup备份 脚本
1、全量备份在周末晚上22点执行备份,增量是周一到周六晚上22点执行 2、考虑到增量备份第一次是根据全量备份开始备份,后面都是根据上一次增量备份在增量脚本做了if判断,周日做一次目录清理 3、每周日晚上91点50清理目录 22点就在次备份&#…...

13SpringMVC中拦截器的配置(拦截规则)和多个拦截器的preHandle,postHandle执行顺序原理详解
拦截器 Servlet中的过滤器的实现及其原理,参考文章 配置一个拦截器 SpringMVC中请求的处理流程: 用户请求—>listener—>filter—>DispatcherServlet—>filter—>preHandle—>controller—>postHandle 第一步: 编写一个Java类实现HandlerInterceptor(…...
Liunx中系统安全及文件系统(极其粗糙版)
PS:下面知识点还很粗糙下次有时间再改 系统安全: 系统安全和数据防护,数据备份的资质 比如三台服务器: 500万 工信部是有要求的,组织必须保证处理的个人数据的安全性 品牌形象如何维护呢 基于liunx的安全加固措施…...
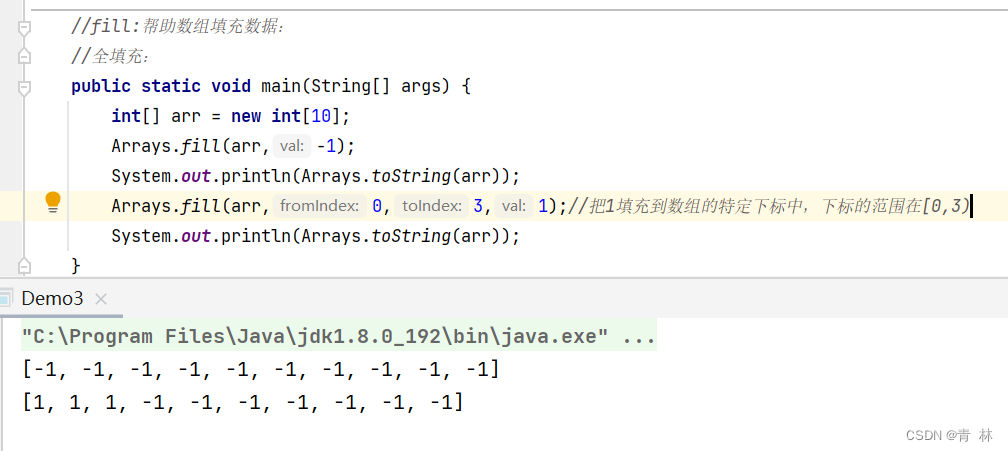
Java中的数组
前言: 本篇博客将为大家介绍Java中的数组的相关知识。 目录 基本介绍 概念相关 数组的使用 数组是引用类型 应用场景 保存数据 作为方法的参数 作为方法的返回值 练习 数组转字符串 数组拷贝 求数组中元素的平均值 查找数组中的指定元素(二…...
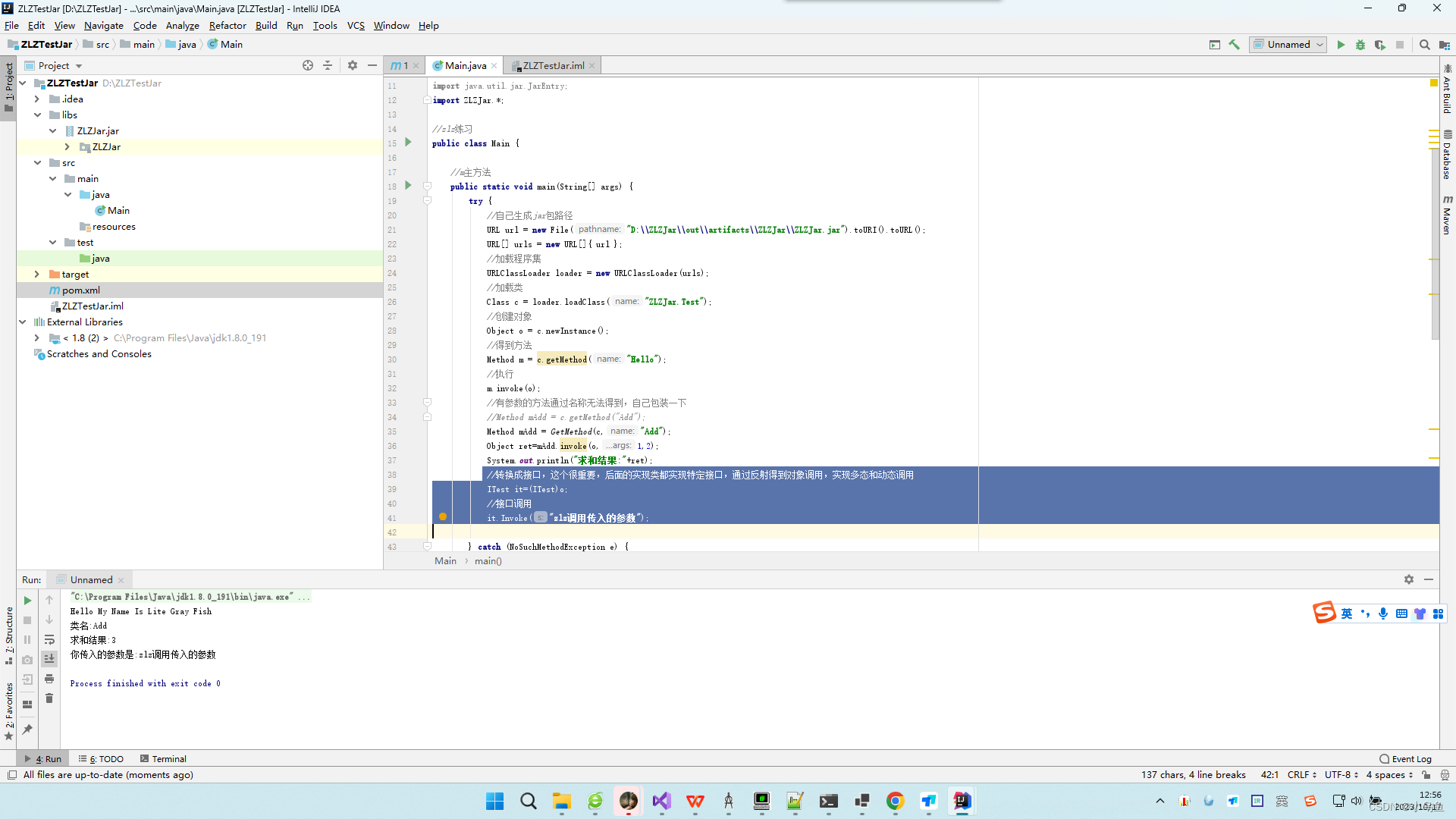
Java反射调用jar包实现多态
上一篇实现了反射调用jar包,但是没有实现多态,这次先给自己的jar包类抽象一个接口,然后实现类实现接口。最后调用放反射得到的对像转换成接口类型调用执行。 定义接口,指定包为ZLZJar package ZLZJar;public interface ITest {p…...
PowerBI 一些基础功能
1、PowerBI创建日期表 1.1、Power BI 日期表 - 知乎日期是做数据分析的时候使用最频繁的分析维度,一般建议建立单独的日期维度表,并与事实表的日期字段建立连接。 建立日期维度表可通过DAX函数的方式进行: 日期表 CALENDAR(DATE("2023&…...

Mac用命令行安装Adobe代码字体Source Code Pro
执行命令 brew tap homebrew/cask-fonts && brew cask install font-source-code-pro...

RustDay05------Exercise[31-40]
31.结构体申明 结构体在这里给了三种声明样式 (1)字典样式的键值对(使用花括号) (2)元组样式的数值元组(使用圆括号) (3)空结构体,可以被格式化输出名字 // structs1.rs // Address all the TODOs to make the tests pass! // Execute rustlings hint structs1 or use the…...

wireshark过滤器的简单介绍
wireshark过滤器的简单介绍 Wireshark的过滤器主要分为捕获过滤器和显示过滤器两种,其中捕获过滤器在数据包捕获时起作用,而显示过滤器用于在已捕获的数据包的集合中筛选数据。以下是一些Wireshark过滤器的详细介绍: 捕获过滤器:…...

基于MCP协议构建本地AI短信分析工具:mac_messages_mcp项目详解
1. 项目概述:一个让AI“读懂”你Mac短信的桥梁如果你正在折腾AI智能体,尤其是那些能帮你处理日常信息的自动化工具,你可能会遇到一个核心痛点:如何让AI安全、便捷地访问你设备上的原生应用数据?比如,Mac上的…...

AI圈大事!网友:太离谱了~
最近技术圈友发生了件大事:今年 2 月刚刚开源的 Hermes Agent,GitHub star 数已超过 106k。有些同学可能还不太了解,我们先来说说 Hermes 是什么。它不是简单的聊天机器人,是能自己做事、会学习、越用越聪明的数字员工。为啥能火成…...

AGIAgent框架实践:从LLM到可编程智能体的工程化之路
1. 项目概述:从AGI到AGIAgent的实践跨越最近在GitHub上看到一个挺有意思的项目,叫agi-hub/AGIAgent。光看名字,可能很多朋友会立刻联想到“通用人工智能”或者“AI智能体”,觉得这又是一个宏大叙事下的概念性项目。但实际深入探究…...

【C/C++】libusb实战:从零构建ADB USB通信框架
1. 为什么需要自己实现ADB USB通信? 很多开发者第一次接触ADB时,都是直接使用官方提供的adb命令行工具。这个工具确实方便,但当你需要深度定制Android设备调试流程,或者开发自动化测试框架时,官方工具就显得不够灵活了…...

NovelClaw:基于Python的异步小说采集框架设计与实战
1. 项目概述:一个面向小说爱好者的现代化数据采集工具 如果你是一个小说爱好者,或者像我一样,曾经为了追更某本网络小说,不得不每天手动刷新十几个不同的网站,忍受着弹窗广告和混乱的排版,那么你一定能理解…...

如何快速解决城通网盘下载限速问题:ctfileGet完整使用指南
如何快速解决城通网盘下载限速问题:ctfileGet完整使用指南 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet 你是否曾经因为城通网盘下载速度只有几十KB/s而抓狂?面对缓慢的进度条…...
)
动漫分镜图批量生成实战:用/mj batch+自定义--style raw指令链,单日产出24张电影级分镜(附可复用Prompt矩阵表)
更多请点击: https://intelliparadigm.com 第一章:动漫分镜图批量生成的核心价值与技术边界 动漫分镜图(Storyboard)是动画制作前期的关键资产,传统手绘或半自动流程耗时长、风格不一致、迭代成本高。批量生成技术通…...

怎么降低维普AI率?答辩前1周从70%降到15%以内实操指南!
怎么降低维普AI率?答辩前1周从70%降到15%以内实操指南! 答辩前 1 周送维普测 70% 是什么具体场景? 周一早上 9 点,导师群里发消息:「这周送维普看 AIGC 检测,达标了才能进答辩」。我硕士论文用 DeepSeek …...

用GitHub仓库构建个人技能树:结构化、版本化知识管理实践
1. 项目概述:从“技能”仓库到个人知识体系的构建最近在GitHub上看到一个挺有意思的仓库,名字叫Apolinariolanga/skills。乍一看,这名字很直白——“技能”。在技术社区里,以“skills”命名的仓库并不少见,但每一个背后…...

数据工程师技能树:从核心原理到实战项目的体系化成长指南
1. 项目概述:一个面向数据工程师的“技能树”仓库最近在GitHub上看到一个挺有意思的仓库,叫AceDataCloud/Skills。光看名字,你可能会觉得这是一个普通的“技能列表”或者“学习路线图”。但点进去仔细研究后,我发现它的定位非常精…...