基于模型预测人工势场的船舶运动规划方法,考虑复杂遭遇场景下的COLREG(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现
💥1 概述
船舶运动规划是海上自主水面舰艇(MASS)自主导航的核心问题。该文提出一种考虑避碰规则的复杂遭遇场景模型预测人工势场(MPAPF)运动规划方法。建立了一个新的船舶域,其中设计了一个闭区间势场函数来表示船舶域的不可侵犯属性。在运动规划过程中,采用具有预定义速度的Nomoto模型来生成符合船舶运动学的可遵循路径。为解决传统人工势场(APF)方法的局部最优问题,保证复杂遭遇场景下的防撞安全,提出一种基于模型预测策略和人工势场的运动规划方法MPAPF。该方法将船舶运动规划问题转化为具有机动性、导航规则、通航航道等多重约束的非线性优化问题。4个算例的仿真结果表明,与APF、A星和快速探索随机树(RRT)的变体相比,所提出的MPAPF算法能够解决上述问题,并生成可行的运动路径,避免复杂遭遇场景下的船舶碰撞。
文献来源:

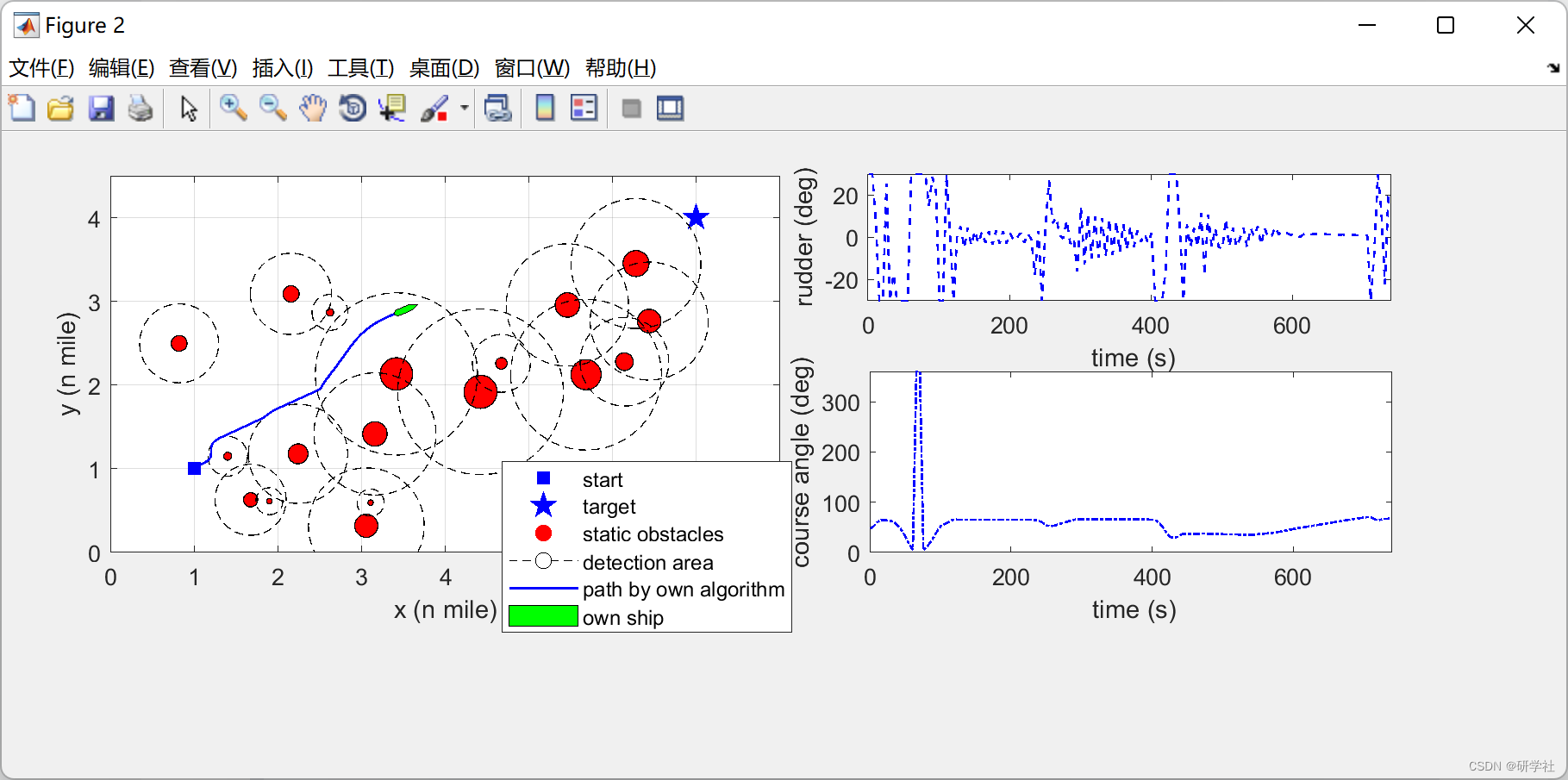
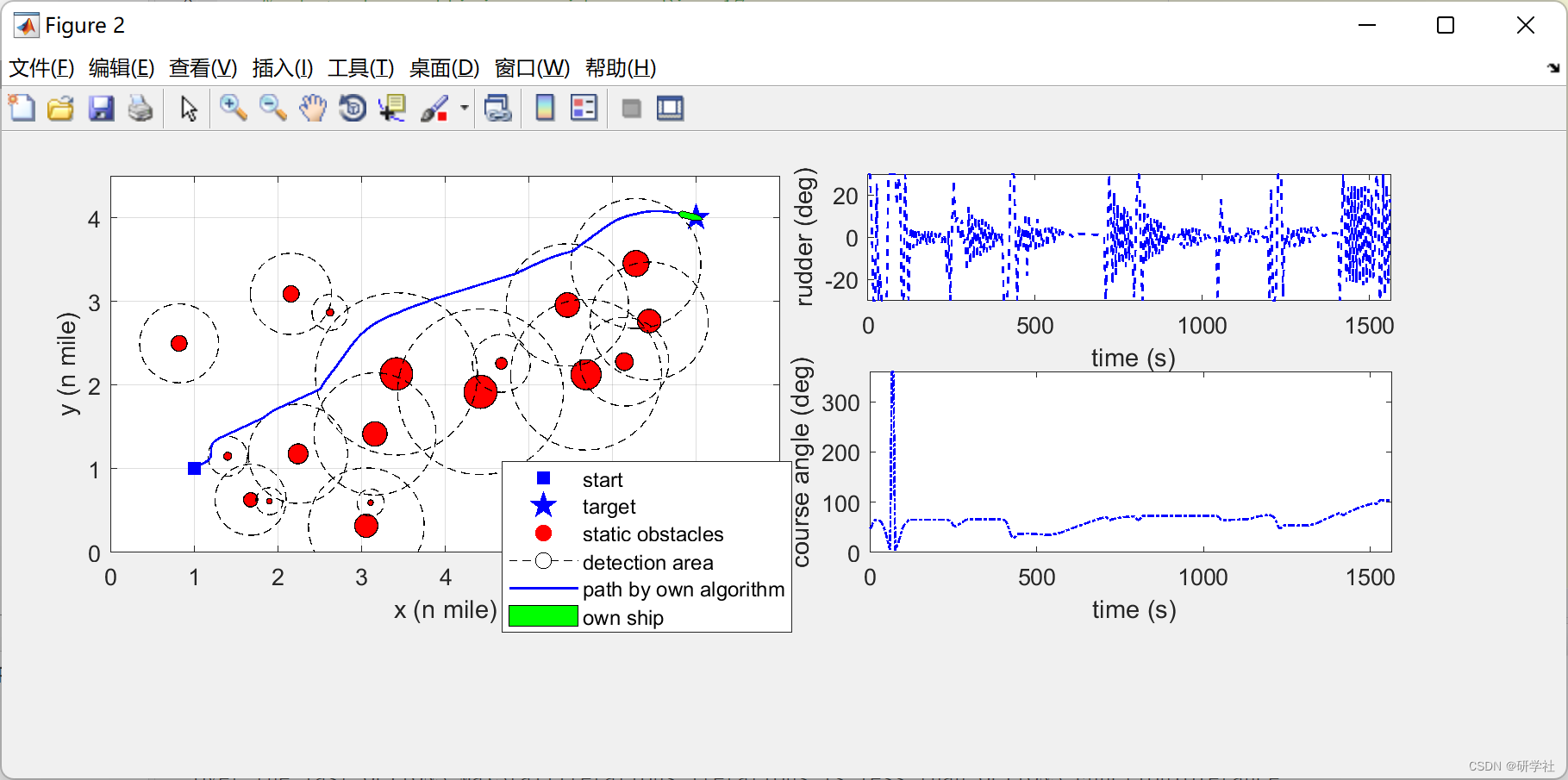
📚2 运行结果
输入预测步长(我们建议应该是1~10,在这个程序中,1步可能花费你120秒,而10步可能比1步高100倍。


部分代码:
%% initialization
static_obs_num = [12;6];
mailme = 0;
% static_obs_area = [0.8, 2, 7, 8;
% 2, 0.2, 10, 2];
static_obs_area = [0.5, 0, 4.5, 4;
4.5, 2, 6.5 3.5];
dynamic_ships = [1;1;1;1];
parameter.waterspeed = 0/1852;
parameter.waterangle = 45;
parameter.water = [sind(parameter.waterangle) cosd(parameter.waterangle)]*parameter.waterspeed;
parameter.minpotential = 0.001;
parameter.minpotential4ship = 0.01;
parameter.minobstacle = 0.03;
parameter.maxobstacle = 0.2;
parameter.safeobstacle = 5;
parameter.amplification = 5;
parameter.safecv = 2.5;%n mile safety collision aviodance distance
parameter.dangercv = 0.5;% danger collision aviodance distance
parameter.shipdomain = 5;
parameter.tsNum = 1;
%% simulation environment
map_size = [8,4.5];
start_point = [1 1];
end_point = [7,4];
tmp_end_point = end_point;
parameter.endbeta = -log(parameter.minpotential)/(norm(end_point-start_point)*2)^2;
mat_point = init_obstacles(static_obs_num,static_obs_area); % Generate static obstacles randomly
ship.speed = 8.23; % meters per second equal to 16 knots
ship.v = 0;
ship.data = [... data = [ U K T n3]
6 0.08 20 0.4
9 0.18 27 0.6
12 0.23 21 0.3 ];
% interpolate to find K and T as a function of U from MSS toolbox 'frigate'
prompt = 'Prediction Step\n'; % input the prediction step, 1~10
parameter.prediction_step = input(prompt);
ship.k = interp1(ship.data(:,1),ship.data(:,2),ship.speed,'linear','extrap'); %ship dynamic model you can change the dynamic model in shipdynamic.m
ship.T = interp1(ship.data(:,1),ship.data(:,3),ship.speed,'linear','extrap');
ship.n3 = interp1(ship.data(:,1),ship.data(:,4),ship.speed,'linear','extrap');
ship.Ddelta = 10*pi/180; % max rudder rate (rad/s)
ship.delta = 30*pi/180; % max rudder angle (rad)
ship.length = 100;
ship.p_leader = -8;
ship.alpha_leader = 3;
ship.yaw = 45;
ship.yaw_rate = 0;
ship.rudder = 0;
ship.rudder_rate = 0;
ship.position = [1 1];
ship.gamma = 1;
ship.lamda = log(1/parameter.minpotential4ship-1)/((parameter.shipdomain)^2-1);
ship.prediction_postion = [];
tsPath{parameter.tsNum} = [];
ship1 = ship;
parameter.scale = 1852; % 1852m in real world ,1 in simulation;
parameter.time = 5; % time per step
parameter.searching_step = 3000; % max searching step
parameter.map_size = map_size; % map size for display
parameter.map_min = 0.05; % minmum map details
parameter.end1 = 0.05;
% parameter.situs1 = [6.1 1.75 3.25 1.75];
parameter.situs1 = [6.1 3.9 3.25 1.75]; % a quaternion ship domain proposed in Wang 2010,situs1 means in head-on situation
parameter.situs2 = [6.1 3.9 3.25 1.75]; % a quaternion ship domain proposed in Wang 2010,situs2 means in crossing and give-way situation
parameter.situs3 = [0.0 0.0 0.00 0.00]; % a quaternion ship domain proposed in Wang 2010,situs3 means in crossing and stand-on situation
parameter.situs0 = [6.0 6.0 1.75 1.75]; % a quaternion ship domain proposed in Wang 2010,situs0 means in norm naviation situation
ship_scale = 1;
leader_stop = 0;
tic
draw2();
set(gcf,'position',[200 200 1361/1.5 750/2]);
hold on
LB_follower = [];
UB_follower = [];
for i = 1 : parameter.prediction_step
LB_follower = [LB_follower 0 -ship.delta];% lower limiting value
UB_follower = [UB_follower 0 ship.delta];% upper limiting value
end
parameter.navars = 2*parameter.prediction_step;% number of navars
targetship=init_ship(ship,'others',1000);
🎉3 参考文献
[1]He, Zhibo, et al. “A Novel Model Predictive Artificial Potential Field Based Ship Motion Planning Method Considering COLREGs for Complex Encounter Scenarios.” ISA Transactions, Elsevier BV, Sept. 2022, doi:10.1016/j.isatra.2022.09.007.
🌈4 Matlab代码实现
相关文章:
基于模型预测人工势场的船舶运动规划方法,考虑复杂遭遇场景下的COLREG(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
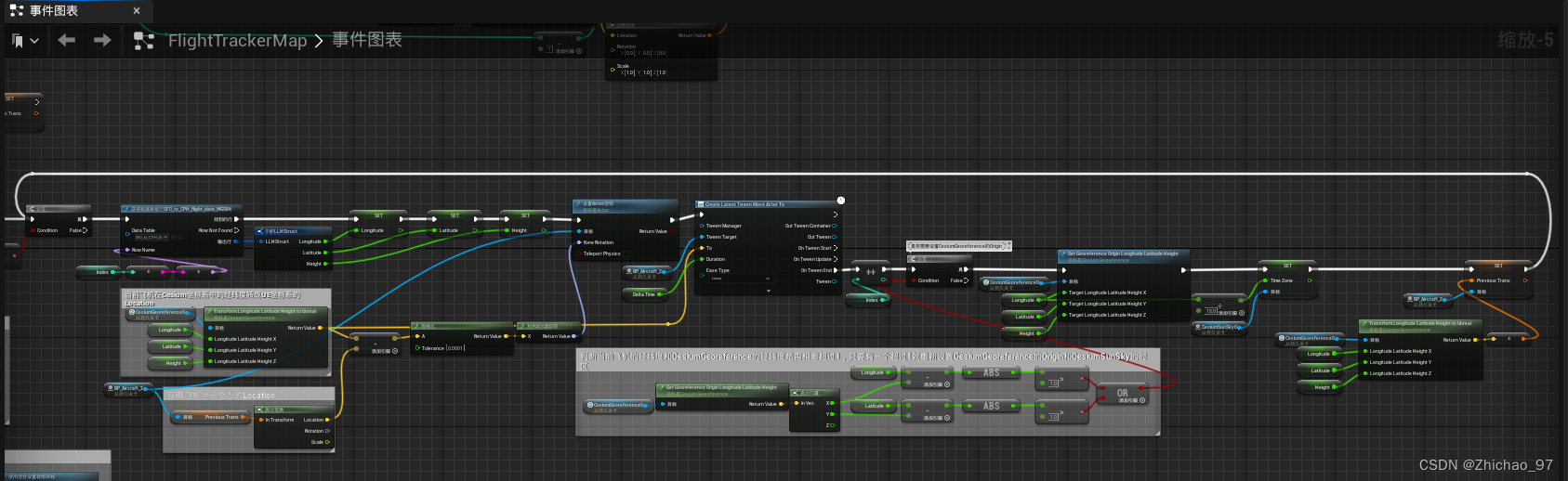
【UE5 Cesium】19-Cesium for Unreal 建立飞行跟踪器(4)
遗留问题 在上一篇博客中(【UE5 Cesium】18-Cesium for Unreal 建立飞行跟踪器(3)),我们实现了飞机变速飞行的功能,但是还存在两个问题,分别是: (1)由于UE的…...

TrustZone
TrustZone技术 让我们从最重要的问题开始:为什么存在TrustZone技术,它防御什么?保护用 C 和 C 编写的大型程序免受黑客攻击可能是一个挑战。内存损坏漏洞是一个常见问题,尽管消除它们是安全工程师的核心目标,但从操作…...
✔ ★【备战实习(面经+项目+算法)】 10.16学习时间表(总计学习时间:5h)
✔ ★【备战实习(面经项目算法)】 坚持完成每天必做如何找到好工作1. 科学的学习方法(专注!效率!记忆!心流!)2. 每天认真完成必做项,踏实学习技术 认真完成每天必做&…...

React + Router
React Router 这个只是专门讲解 React Router 新开的例子。 教程来源:https://reactrouter.com/en/main/start/tutorial 创建新项目 yarn create vite my-react-router-app --template react-ts cd my-react-router-app yarn安装 React Router 依赖: yarn add…...

微信小程序设置动态变量设值
微信小程序设置动态变量设值 微信小程序如何动态变量设值? 示例代码如下: setValFunc() {const key this.data.currentPickerid; // 业务需求动态键值key,或者是上一界面获取的动态key值const value 变量值;this.setData({[${key}]: valu…...

闪站侠洗衣洗鞋多门店多用户管理系统,洗鞋店干洗店小程序开发;
闪站侠洗护软件是多分店多用户管理系统,一个分店可以同时关联多个用户。闪站侠洗护管理软件通过互联网为洗衣店/洗鞋店干洗店提供加盟或直营连锁管理; 实现会员洗衣的门店收衣->上门收衣->开单拍照->清洗护理/工厂洗涤->微|信/短…...
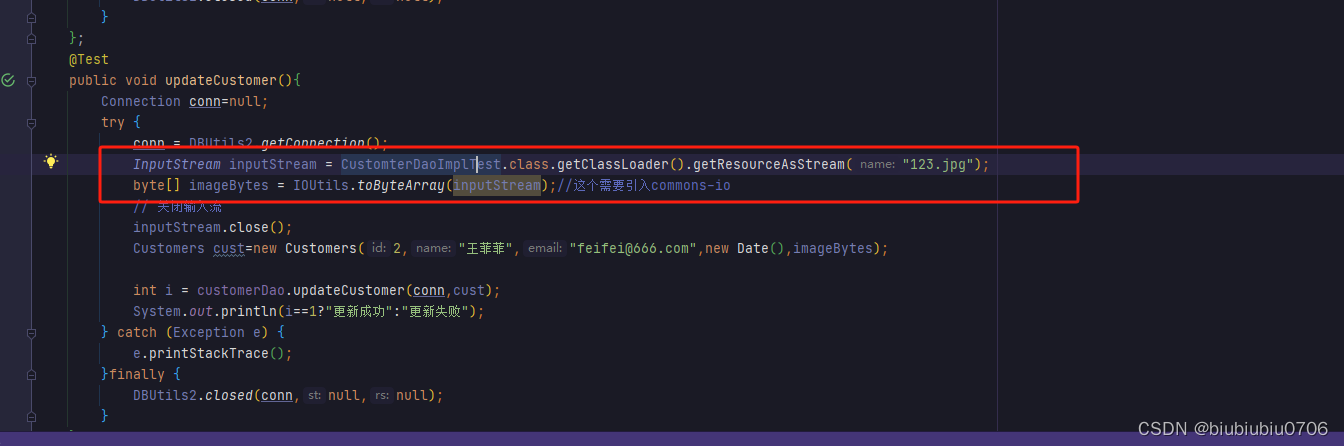
JDBC增删改查示例
数据库表 CREATE TABLE customers ( id int NOT NULL AUTO_INCREMENT, name varchar(15) DEFAULT NULL, email varchar(20) DEFAULT NULL, birth date DEFAULT NULL, photo mediumblob, PRIMARY KEY (id) ) ENGINEInnoDB AUTO_INCREMENT39 DEFAULT CHARSETgb2312;…...

emqx broker安装
emqx broker安装 Emq x百万级开源 MQTT 消息服务器 是基于 Erlang/OTP 语言平台开发 一款完全开源,高可用低时延的百万级分布式物联网 MQTT 5.0 消息服务器 官方地址: https://www.emqx.com/zh Centos7 安装 #下载Centos7 amd64位版本 wget https://www.emqx.c…...

如何选择国产压力测试工具?
随着互联网的飞速发展,软件应用的性能和稳定性变得愈发重要。无论是在线购物网站、社交媒体平台还是移动应用程序,用户都期望能够快速、流畅地访问和使用它们。为了确保应用程序在高负载下仍能够正常运行,压力测试工具变得至关重要。在国内&a…...
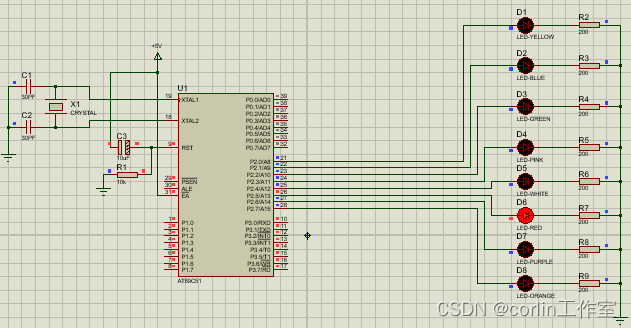
基于AT89C51流水花样灯proteus仿真设计
一、仿真原理图: 二、仿真效果图: 三、仿真工程: c51单片机流水灯花样灯proteus仿真设计资源-CSDN文库...
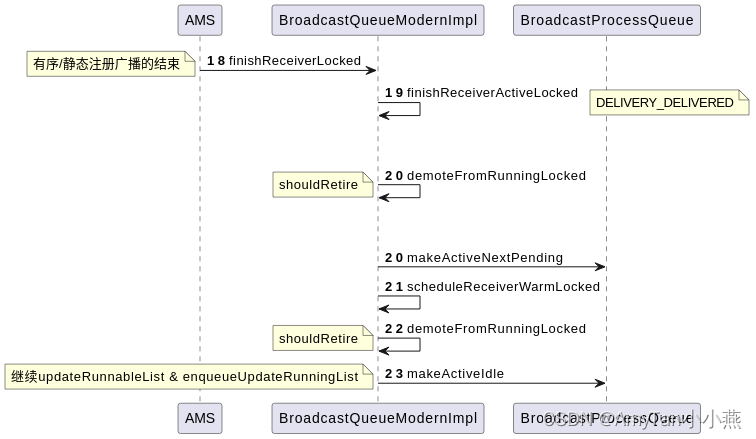
android U广播详解(二)
android U广播详解(一) 基础代码介绍 广播相关 // 用作单个进程批量分发receivers,已被丢弃 frameworks/base/services/core/java/com/android/server/am/BroadcastReceiverBatch.java // 主要逻辑所在类,包括入队、分发、结束…...
死循环的问题)
导航守卫的使用记录和beforeEach( )死循环的问题
前置导航守卫beforeEach的使用 import Vue from vue import VueRouter from vue-router // 进度条 import NProgress from nprogress import nprogress/nprogress.cssVue.use(VueRouter)// 路由表 const routes [{path: "/",redirect: "/home",},{path: …...
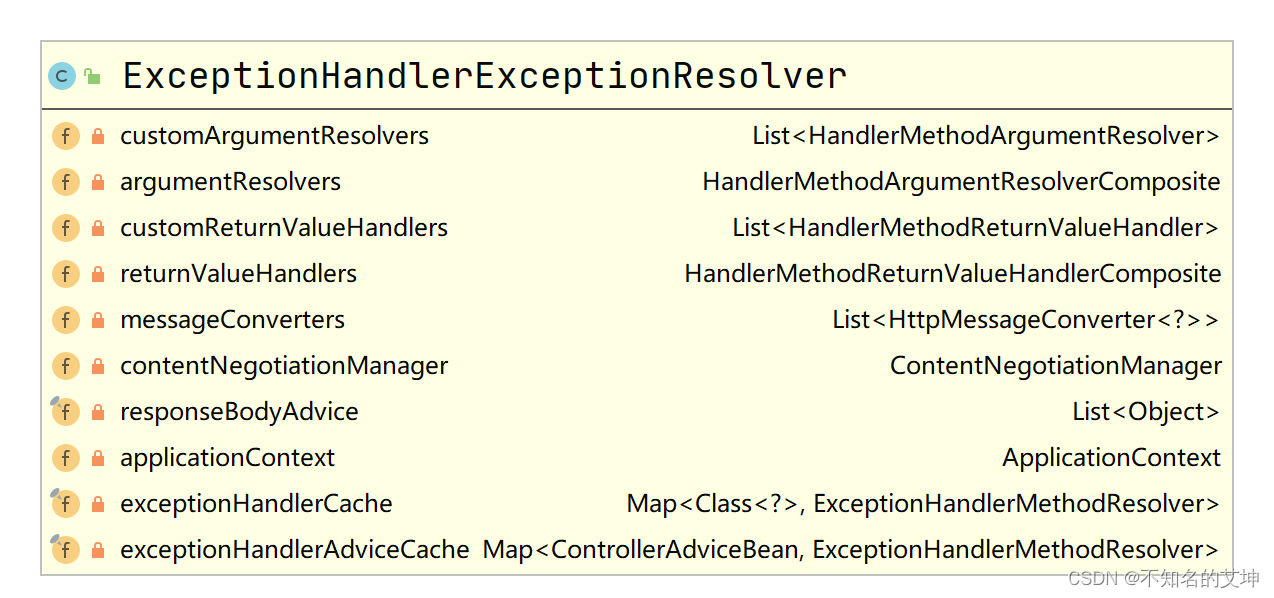
SpringMVC源码分析(三)HandlerExceptionResolver启动和异常处理源码分析
问题:异常处理器在SpringMVC中是如何进行初始化以及使用的? Spring MVC提供处理异常的方式主要分为两种: 1、实现HandlerExceptionResolver方式(HandlerExceptionResolver是一个接口,在SpringMVC有一些默认的实现也可以…...
系统架构与Tomcat的安装和配置
2023.10.16 今天是学习javaweb的第一天,主要学习了系统架构的相关知识和原理,下载了web服务器软件:Tomcat,并对其进行了配置。 系统架构 包括:C/S架构 和 B/S架构。 C/S架构: Client / Server࿰…...

【Shell脚本】根据起止日期获取Alert日志内容
【Shell脚本】根据起止日期获取Alert日志内容 根据输入的起止日期字符串,检索Oracle告警日志,打印中间的日志行内容。 #!/bin/bash # $1 START_TIME_STR, e.g. "Oct 17 07:" # $2 END_TIME_STR, e.g. "Oct 17 08:" source /home/o…...
Library projects cannot set applicationId. applicationId is set to
Library projects cannot set applicationId. applicationId is set to com.xxx.library_cache in default config. 删掉即可...
【兔子王赠书第2期】《案例学Python(基础篇)》
文章目录 前言推荐图书本书特色本书目录本书样章本书读者对象粉丝福利丨评论免费赠书尾声 前言 随着人工智能和大数据的蓬勃发展,Python将会得到越来越多开发者的喜爱和应用。身边有很多朋友都开始使用Python语言进行开发。正是因为Python是一门如此受欢迎的编程语…...
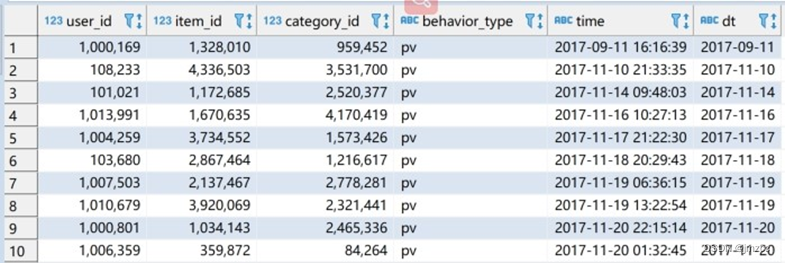
用户行为数据案例
一、环境要求 HadoopHiveSparkHBase 开发环境。 二、数据描述 本数据集包含了2017-09-11至2017-12-03之间有行为的约5458位随机用户的所有行为(行为包括点击、购买、加购、喜欢)。数据集的每一行表示一条用户行为,由用户ID、商品ID、商品类…...

selenium教程 —— css定位
说明:本篇博客基于selenium 4.1.0 selenium-css定位 element_css driver.find_element(By.CSS_SELECTOR, css表达式) 复制代码 css定位说明 selenium中的css定位,实际是通过css选择器来定位到具体元素,css选择器来自于css语法 css定位优点…...

突破内存瓶颈:HBM、CXL与GPU新部署策略
训练生成式AI模型本身已是一项成本高昂、能耗巨大的工作。随着超大规模数据中心和前沿研究机构竞相扩展边缘推理与智能体AI能力,GPU的部署正变得愈加复杂,尤其是在内存层面。在数据中心中,对先进内存配置的需求日益迫切。不断增多的AI处理器正…...
)
收藏必备!小白程序员轻松上手大模型:RAG技术实战指南(含评测体系)
本文深入浅出地解析了RAG(检索增强生成)技术在大模型开发中的应用,覆盖了从文档加载、智能切分到索引构建、检索优化、生成调优的全链路实战指南,并介绍了进阶的Graph RAG和多跳推理。特别强调了“可测、可调、可信赖”的RAG工程化…...
)
今日算法(构造二叉搜索树)
题目描述给你一个整数数组 nums,其中元素已经按 升序 排列,请你将其转换为一棵 平衡 二叉搜索树(BST)。平衡二叉搜索树:左右两个子树的高度差的绝对值不超过 1每个节点的左右子树都是平衡二叉树二叉搜索树的中序遍历结…...

别再只用v-html了!Vue.js项目里防XSS,这个vue-xss插件配置一次就搞定
Vue.js项目实战:用vue-xss插件构建坚不可摧的XSS防御体系 在富文本交互频繁的现代Web应用中,安全防线就像大楼的消防系统——平时看不见,关键时刻能救命。最近接手一个医疗咨询平台项目时,我们遇到个典型场景:医生端使…...

冲压送料机远程监控运维管理系统方案
某设备制造商,常年向汽车零部件、电子元器件等行业客户供应各类冲压送料设备,随着市场拓展,其售后运维面临诸多突出问题。一方面,设备分布地域广泛,客户上报故障后,售后服务往往响应滞后且运维成本居高不下…...

YOLO26 ONNX Runtime 部署实战:告别NMS后处理,边缘推理新标杆
🚀 YOLO26 ONNX Runtime 部署实战:告别NMS后处理,边缘推理新标杆 摘要: Ultralytics 重磅推出的 YOLO26 不仅在精度上实现了代际飞跃,更在架构层面进行了颠覆性革新——彻底移除了传统的 NMS(非极大值抑制)后处理环节。本文将带你深入了解 YOLO26 的核心优势,并基于 …...

西方垃圾思维在中国 AI 大模型中的渗透机制与贾子理论替代范式研究
西方垃圾思维在中国 AI 大模型中的渗透机制与贾子理论替代范式研究摘要: 西方垃圾思维(WCG)正通过“伪自主”模式深度渗透中国主流AI大模型。百度文心、讯飞星火等模型表面宣称“自主研发”“遵循社会主义核心价值观”,实则借助标…...

语音修复终极指南:如何用VoiceFixer在3分钟内拯救受损音频
语音修复终极指南:如何用VoiceFixer在3分钟内拯救受损音频 【免费下载链接】voicefixer General Speech Restoration 项目地址: https://gitcode.com/gh_mirrors/vo/voicefixer 在数字时代,音频质量问题困扰着无数内容创作者、历史档案工作者和普…...

在VS Code中结合Taotoken API快速构建代码辅助工具
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在VS Code中结合Taotoken API快速构建代码辅助工具 对于希望提升编码效率的开发者而言,将AI能力深度集成到日常开发环境…...

YimMenu:GTA V终极开源菜单的完整实战指南
YimMenu:GTA V终极开源菜单的完整实战指南 【免费下载链接】YimMenu YimMenu, a GTA V menu protecting against a wide ranges of the public crashes and improving the overall experience. 项目地址: https://gitcode.com/GitHub_Trending/yi/YimMenu Yi…...