SLAM从入门到精通(dwa速度规划算法)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
要说搜路算法,这个大家都比较好理解。毕竟从一个地点走到另外一个地点,这个都是直觉上可以感受到的事情。但是这条道路上机器人应该怎么走,以什么样的速度、什么样的角速度走,这里面有很大的学问。一方面,机器人本身的机械特性决定了它的速度、角速度这些参数都有一定范围约束的;另外一方面,不同的速度、角速度走出来的轨迹可能是不一样的,特别是拐弯的时候。这个时候,什么样的轨迹最适合我们机器人,就需要设计出一套标准来甄别了。比如,是越快越好,还是越安全越好,还是说离目标越近越好。
对于客户来说,速度、角速度肯定是越快越好。但是机械的特性决定了很多时候它快不了,比如转弯的时候,甚至是连续转弯的时候,速度快了反而不安全。正因为有了这些需求,所以才会有了dwa算法设计出来帮助我们来解决这些问题。
1、了解机器人的参数
每一款机器人都有自己独特的参数,比如最小速度、最大速度;最小角速度、最大角速度;最小线加速度、最大线加速度等等。这些数据都需要做很好的了解。不仅如此,我们还需要知道机器人的最小转弯半径。如果可以原地旋转,这固然很好。但是大多数机器人不一定可以做到这一点。
2、了解机器人的运动学模型
之前我们说过差速轮的运动学模型,假设速度分别为v和w,那么后面小车的轨迹应该是这样的,
x += v * cos(theta) * dt
y += v * cos(theta) * dt
theta += w * dt当然这里描述的只是差速轮的运动学模型,其他机器人的运动学模型也可以通过类似的方法进行计算。
3、速度采样、加速度采样
以速度为例,机器人本身有一个最小速度,还有一个最大速度。此外,它还有一个最小加速度、最大加速度。所以对于任意时刻的速度v,依据加速度的范围可以得到一个数值[v_min, v_max],但是这个范围不能超过[vmin,vmax]机器人本身要求的范围。所以最终机器人的速度区间应该是在[max(v_min, vmin), min(v_max, vmax)]这个范围之内。加速度也是一样的道理。
4、轨迹评价标准
本身dwa提供了三个评价标准,分别是目标、速度以及和障碍物的最小距离。当然,这三个标准是不一定适用于所有项目,我们完全可以自己来设计评价标准。
5、测试代码
dwa算测的测试代码是用python实现的,参考一本ros书上的内容,在此表示感谢。此python代码用python3执行,依赖于库matplotlib,直接输入python3 dwa.py即可。代码内容如下,
import numpy as np
import matplotlib.pyplot as plt
import mathclass Info():def __init__(self):self.v_min = -0.5self.v_max = 3.0self.w_max = 50.0 * math.pi / 180.0self.w_min = -50.0 * math.pi / 180.0self.vacc_max = 0.5self.wacc_max = 30.0 * math.pi / 180.0self.v_reso = 0.01self.w_reso = 0.1 * math.pi / 180.0self.radius = 1.0self.dt = 0.1self.predict_time = 4.0self.goal_factor = 1.0self.vel_factor = 1.0self.traj_factor = 1.0def motion_model(x,u,dt):x[0] += u[0] * dt * math.cos(x[2])x[1] += u[0] * dt * math.sin(x[2])x[2] += u[1] * dtx[3] = u[0]x[4] = u[1]return xdef vw_generate(x,info):Vinfo = [info.v_min, info.v_max,info.w_min, info.w_max]Vmove = [x[3] - info.vacc_max * info.dt,x[3] + info.vacc_max * info.dt,x[4] - info.wacc_max * info.dt,x[4] + info.wacc_max * info.dt]vw = [max(Vinfo[0], Vmove[0]), min(Vinfo[1], Vmove[1]),max(Vinfo[2], Vmove[2]), min(Vinfo[3], Vmove[3])]return vwdef traj_calculate(x,u,info):ctraj = np.array(x)xnew = np.array(x)time = 0while time <= info.predict_time:x_new = motion_model(xnew,u,info.dt)ctraj = np.vstack((ctraj, xnew))time += info.dtreturn ctrajdef dwa_core(x,u,goal,info, obstacles):vw = vw_generate(x,info)best_ctraj = np.array(x)min_score = 10000.0for v in np.arange(vw[0], vw[1], info.v_reso):for w in np.arange(vw[2], vw[3], info.w_reso):ctraj = traj_calculate(x, [v,w], info)goal_score = info.goal_factor * goal_evaluate(ctraj, goal)vel_score = info.vel_factor * velocity_evaluate(ctraj, info)traj_score = info.traj_factor * traj_evaluate(ctraj, obstacles,info)ctraj_score = goal_score + vel_score + traj_scoreif min_score >= ctraj_score:min_score = ctraj_scoreu = np.array([v,w])best_ctraj = ctrajreturn u,best_ctrajdef goal_evaluate(traj, goal):goal_score = math.sqrt((traj[-1,0]-goal[0])**2 + (traj[-1,1]-goal[1])**2)return goal_scoredef velocity_evaluate(traj, info):vel_score = info.v_max - traj[-1,3]return vel_scoredef traj_evaluate(traj, obstacles, info):min_dis = float("Inf")for i in range(len(traj)):for ii in range(len(obstacles)):current_dist = math.sqrt((traj[i,0] - obstacles[ii,0])**2 + (traj[i,1] - obstacles[ii,1])**2)if current_dist <= info.radius:return float("Inf")if min_dis >= current_dist:min_dis = current_distreturn 1/min_disdef obstacles_generate():obstacles = np.array([[0,10],[2,10],[4,10],[6,10],[3,5],[4,5],[5,5],[6,5],[7,5],[8,5],[10,7],[10,9],[10,11],[10,13]])return obstaclesdef local_traj_display(x,goal,current_traj, obstacles):plt.cla()plt.plot(goal[0], goal[1], 'or', markersize=10)plt.plot([0,14],[0,0],'-k',linewidth=7)plt.plot([0,14],[14,14],'-k',linewidth=7)plt.plot([0,0],[0,14],'-k',linewidth=7)plt.plot([14,14],[0,14],'-k',linewidth=7)plt.plot([0,6],[10,10],'-y',linewidth=10)plt.plot([3,8],[5,5],'-y',linewidth=10)plt.plot([10,10],[7,13],'-y',linewidth=10)plt.plot(obstacles[:,0], obstacles[:,1],'*b',linewidth=8)plt.plot(x[0], x[1], 'ob', markersize=10)plt.arrow(x[0], x[1], math.cos(x[2]), math.sin(x[2]), width=0.02, fc='red')plt.plot(current_traj[:,0], current_traj[:,1], '-g', linewidth=2)plt.grid(True)plt.pause(0.001)def main():x = np.array([2,2,45*math.pi/180,0,0])u = np.array([0,0])goal = np.array([8,8])info = Info()obstacles = obstacles_generate()global_traj = np.array(x)plt.figure('DWA Algorithm')for i in range(2000):u,current_traj = dwa_core(x,u,goal,info,obstacles)x = motion_model(x,u,info.dt)global_traj = np.vstack((global_traj, x))local_traj_display(x, goal, current_traj,obstacles)if math.sqrt((x[0]-goal[0])**2 + (x[1]-goal[1])**2 <= info.radius):print("Goal Arrived")breakplt.plot(global_traj[:,0], global_traj[:,1], '-r')plt.show() if __name__ == "__main__":main()
6、执行效果
代码本身是一个仿真过程,大家可以下载下来在ubuntu环境下测试验证一下。最终实现的效果如下所示,

相关文章:
SLAM从入门到精通(dwa速度规划算法)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 要说搜路算法,这个大家都比较好理解。毕竟从一个地点走到另外一个地点,这个都是直觉上可以感受到的事情。但是这条道路上机…...
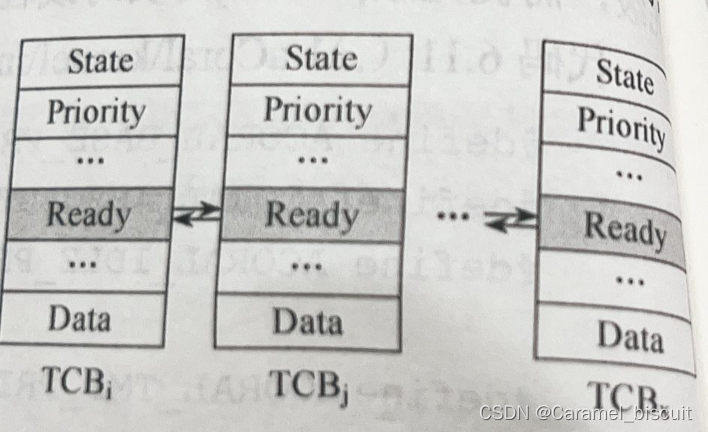
嵌入式实时操作系统的设计与开发(aCoral线程学习)
真正的RTOS,基本上没有做到进程,只是停留在多线程,因为多进程要解决很多问题,且需要硬件支持,这样就使得系统复杂了,从而就可能影响系统实时性。 线程之间是共享地址的,也就是说当前线程的地址…...
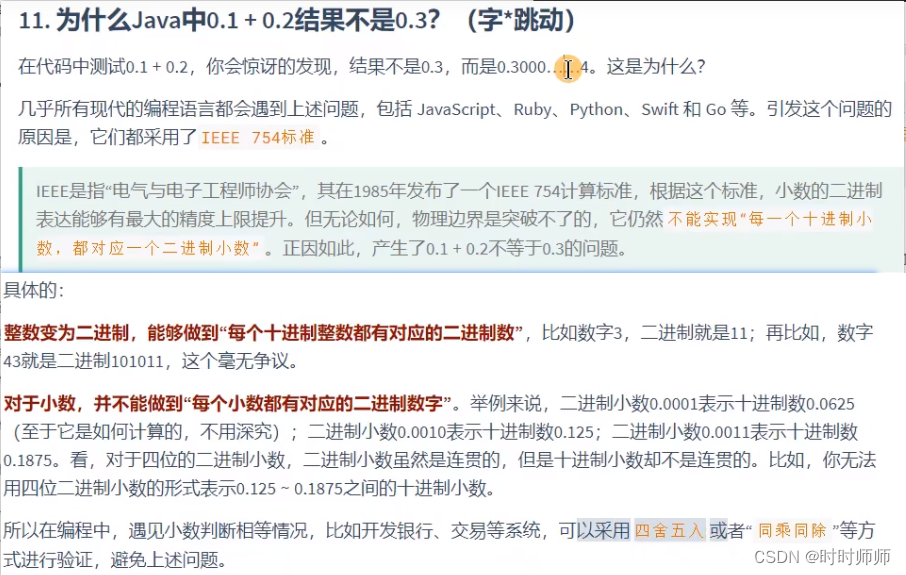
JAVA基础(JAVA SE)学习笔记(二)变量与运算符
前言 1. 学习视频: 尚硅谷Java零基础全套视频教程(宋红康2023版,java入门自学必备)_哔哩哔哩_bilibili 2023最新Java学习路线 - 哔哩哔哩 正文 第一阶段:Java基本语法 1. Java 语言概述 JAVA基础(JAVA SE)学习…...

chatgpt 接口 和 jupyter版本安装
一 接口代码 有时间继续测试 import openai # 填入你的api_key openai.api_key ""models openai.Model.list()# 定义API参数 params {role: "user", "content": }# 定义循环 while True:# 获取用户输入user_input input("请输入您的消…...

ubuntu20.04 nerf开山之作
源码 GitHub - yenchenlin/nerf-pytorch: A PyTorch implementation of NeRF (Neural Radiance Fields) that reproduces the results. 代码的相关解读 NeRF代码解读-相机参数与坐标系变换 - 知乎 原文题目:NeRF: Representing Scenes as Neural Radiance Field…...

Java 中实现单例模式
单例模式 单例模式,就是一个类在任何情况下绝对只有一个实例,并且提供一个全局访问点来获取该实例。 要实现单例,至少需要满足两个点: 私有化构造方法,防止被外部实例化造成多实例问题 提供一个静态方位作为全局访问点…...
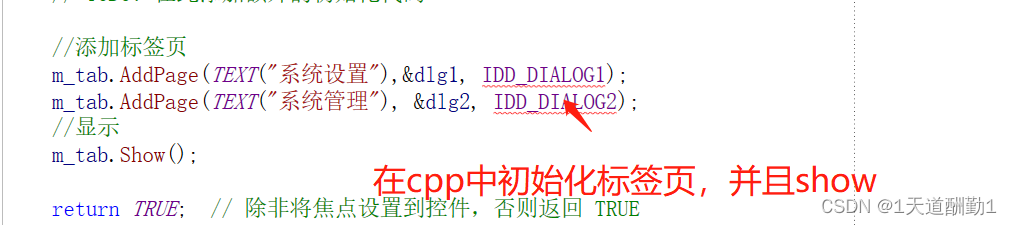
标签页的使用
目录 1、引用TabSheet.h和TabSheet.cpp文件: 2、主窗口添加标签页: (1)、标签页的创建和属性更改 (2)、添加俩个标签页的类 (3)、主窗口添加成员变量 (4)…...
新一代开源语音库CoQui TTS冲到了GitHub 20.5k Star
Coqui TTS 项目介绍 Coqui 文本转语音(Text-to-Speech,TTS)是新一代基于深度学习的低资源零样本文本转语音模型,具有合成多种语言语音的能力。该模型能够利用共同学习技术,从各语言的训练资料集转换知识,来…...
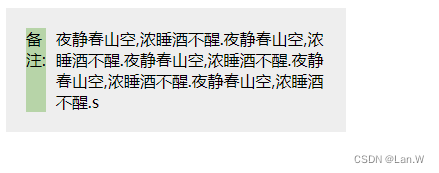
CSS 效果:多列文字,第一行对齐,flex方式元素被挤压
如图效果:2列,第一列只有一行,第二列多行。要求第一行对齐 实现:使用flex 如果不配置flex-shrink的话,第一列会被挤压 给第一列:备注配置压缩属性: flex-shrink:0。 <!DOCTYPE…...
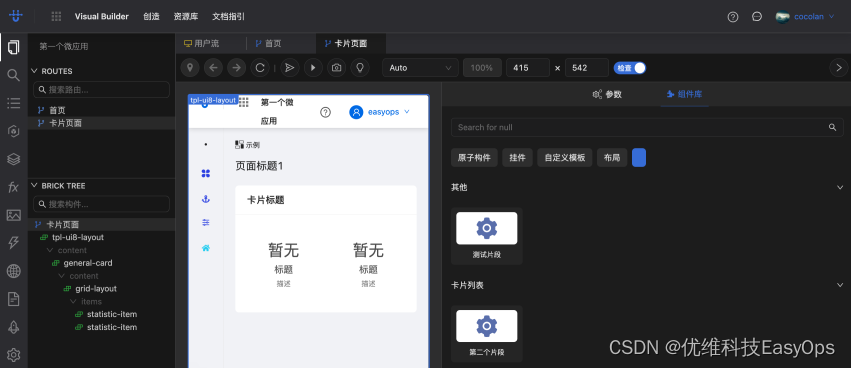
优维低代码实践:片段
优维低代码技术专栏,是一个全新的、技术为主的专栏,由优维技术委员会成员执笔,基于优维7年低代码技术研发及运维成果,主要介绍低代码相关的技术原理及架构逻辑,目的是给广大运维人提供一个技术交流与学习的平台。 优维…...

【计算机网络】第一章、计算机网络体系结构
1.1计算机网络的组成与分类 1.计算机网络的组成 从不同的角度来看内容从组成上看硬件、软件、协议从工作方式上岸边缘部分、核心部分从功能上看通信子网、资源子网 2.计算机网络的分类 角度内容分布范围广域网、城域网、局域网、个域网传输技术广播式网络、点对点网络拓扑结…...

vr火灾逃生安全科普软件开展消防突击教育安全有效
VR火灾逃生自救虚拟体验是一种利用虚拟现实技术来模拟火灾逃生自救场景的教育工具。以下是这个体验的几个优点:VR消防安全体验馆的出现,为城市的安全教育开辟了新的途径。这种创新的体验方式,能够让市民在模拟的火灾场景中学习并掌握消防安全…...
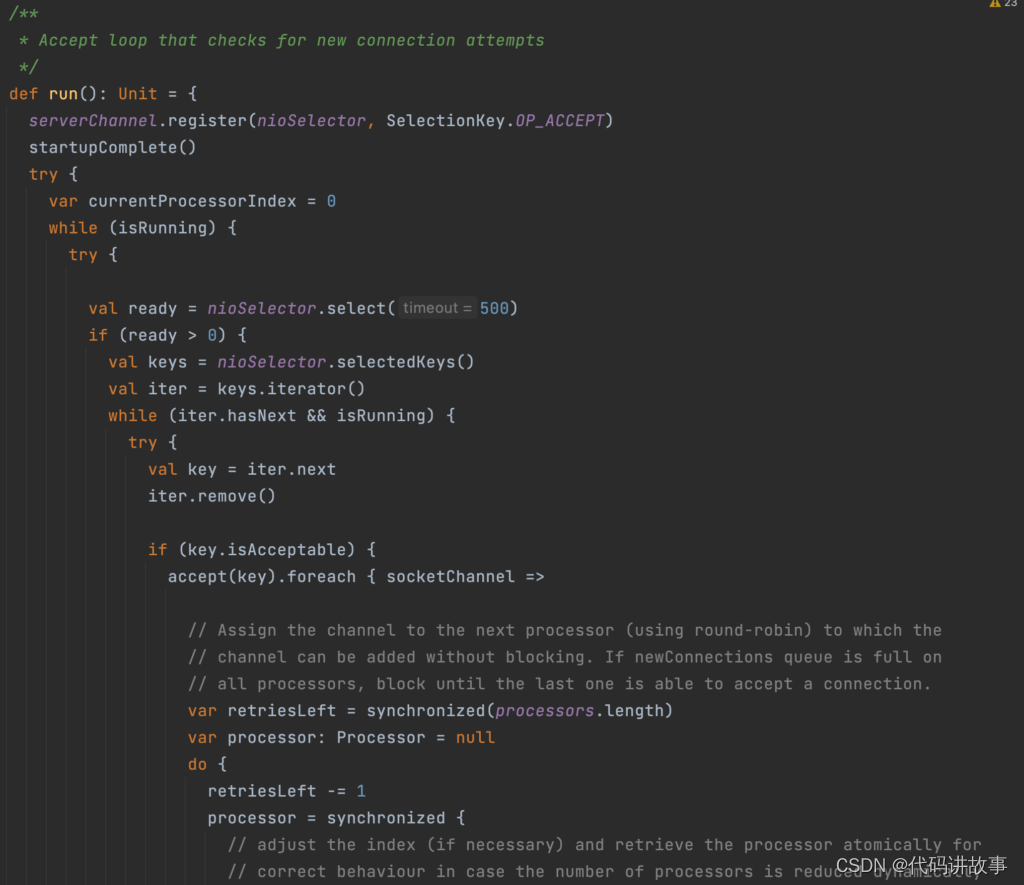
Kafka SASL认证授权(五)ACL源码解析
Kafka SASL认证授权(五)ACL源码解析。 官网地址:https://kafka.apache.org/ 一、ACL检查流程解析 一起看一下kafka server的启动与监听流程: Kafka -> KafkaServer -> SocketServer、KafkaRequestHandler 其中KafkaServer做相关的初始化,包括SocketServer 与 han…...

logback-spring.xml 中根据不同的业务表示,分类打印到不同的文件夹、时区动态设置
logback-spring.xml 中根据不同的业务表示,分类打印到不同的文件夹、时区动态设置 logback-spring.xml 完整配置 <?xml version"1.0" encoding"UTF-8"?> <configuration debug"false" scan"true" scanPeriod&…...

linux系统编程之一
1)fcntl的使用方法 fcntl作用:可以用fcntl函数改变一个已打开的文件属性而不必重新打开文件; 堆排序是完全二叉树,但不是排序二叉树; 排序二叉树要求兄弟节点之间有大小关系,比如说左小右大; 堆排序仅要求…...
【LeetCode】《LeetCode 101》第十三章:链表
文章目录 13.1 数据结构介绍13.2 链表的基本操作206. 反转链表(简单)21. 合并两个有序链表(简单)24.两两交换链表中的节点(中等) 13.3 其它链表技巧160. 相交链表(简单)234. 回文链表…...
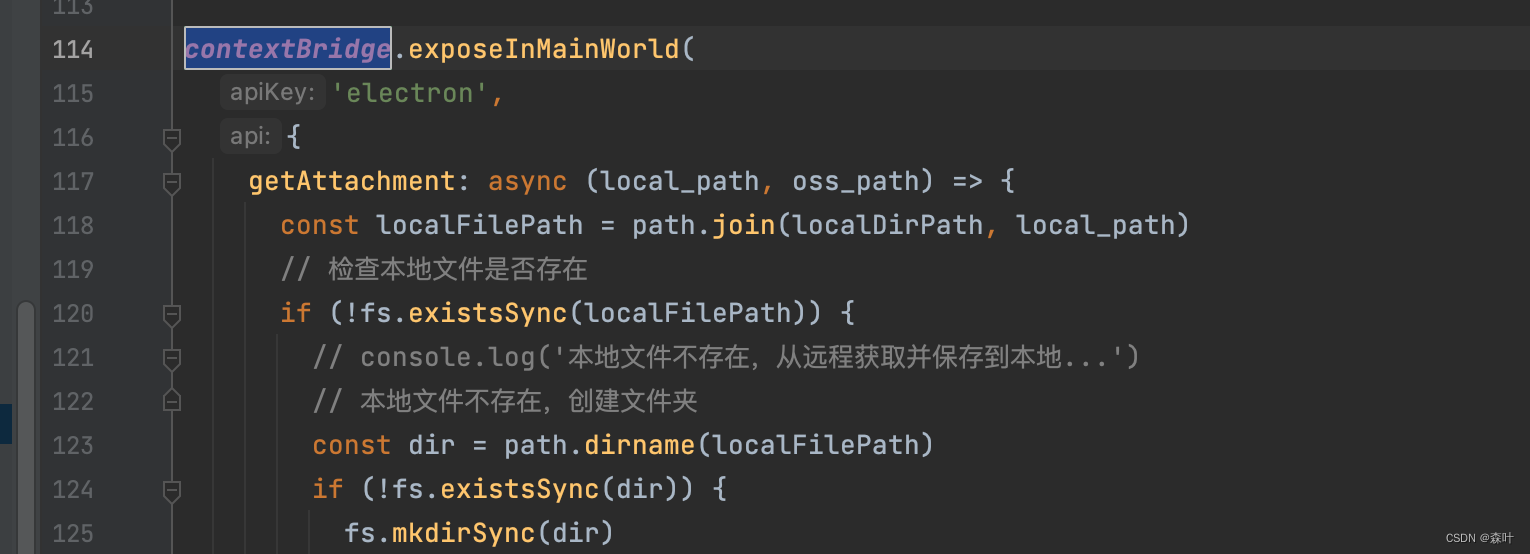
Electron webview 内网页 与 preload、 渲染进程、主进程的常规通信 以及企业级开发终极简化通信方式汇总
Electron 嵌入的页面中注入的是 preload.js 通过在标签中给 prelaod赋值,这里提到了 file://前缀,以及静态目录 static 怎么获取 实际代码,其中__static就是我们存放静态文件的地方,这个 static 是 electron 源代码根目录下的文件…...

AI人工训练师,提升外呼机器人的运营效果
外呼机器人是企业客服和营销的重要工具,外呼机器人可以通过语音识别和语音合成技术,自动拨打电话并进行客户服务和营销推广等工作。由于外呼机器人错误识别和理解偏差容易影响外呼效果,许多外呼机器人厂商选择通过AI人工训练师的技术手段来提…...
nginx正向代理、反向代理、负载均衡(重中之重)
nginx中有两种代理方式: 七层代理(http协议) 四层代理(基于tcp或udp的流量转发) 一、七层代理 原理:客户端请求代理服务器,由代理服务器转发客户端的http请求,转发到内部的服务器…...

MySQl_2
目录 函数 一.字符串函数 二.数值函数 三.日期函数 四.流程控制函数 约束 多表查询 多表关系 一.内连接 二.外连接 三.自连接 四.联合查询 五.子查询 标量子查询 列子查询 行子查询 表子查询 函数 一.字符串函数 二.数值函数 SELECT LPAD(FLOOR(RAND()*1000000),…...

别再焊错线了!51单片机+L298N驱动小车底盘,保姆级接线避坑指南
51单片机L298N驱动小车底盘:从零避坑到一次点亮 当你第一次把51单片机、L298N电机驱动模块、红外传感器和电源组装在一起时,是否曾被那些密密麻麻的杜邦线弄得晕头转向?每个初学者都可能经历过接错线导致芯片冒烟的惨痛教训。本文将用实战经验…...
:数据通路与控制器的“双人舞“)
从沙子到车辙(3.3):数据通路与控制器的“双人舞“
3.3 数据通路与控制器的"双人舞" 📚 本文内容摘自本人的开源书《从沙子到车辙 - 一个工程师的理解》 🔗 在线阅读/下载:from-sand-to-ruts git clone https://github.com/Lularible/from-sand-to-ruts⭐ 如果对您有帮助…...
)
AI视频工业化生产新范式(Sora 2与DaVinci深度耦合技术解密)
更多请点击: https://kaifayun.com 第一章:AI视频工业化生产新范式(Sora 2与DaVinci深度耦合技术解密) Sora 2不再仅是生成式模型的单点突破,而是作为视频工业流水线的智能中枢,与Blackmagic Design DaVi…...

电力系统时序一致性保障:elec-ops-prediction的长时序稳定性约束实现
电力系统时序一致性保障:elec-ops-prediction的长时序稳定性约束实现 【免费下载链接】elec-ops-prediction elec-ops-prediction 是 CANN 社区 Electrical Engineering SIG(电力行业兴趣小组)旗下的电力负荷预测算子库, 聚焦于电…...

如何彻底解决IDM激活问题:开源脚本终极指南
如何彻底解决IDM激活问题:开源脚本终极指南 【免费下载链接】IDM-Activation-Script IDM Activation & Trail Reset Script 项目地址: https://gitcode.com/gh_mirrors/id/IDM-Activation-Script Internet Download Manager激活弹窗困扰着无数用户&#…...

OpenClaw 架构详解:AI Agent 的编排与执行骨架
核心定位:OpenClaw 自动化运行时(Automation Runtime),一个给 AI 套上安全、可控、可审计缰绳的框架。 它不追求 AI 的"惊喜",而是追求可预测性、可审计性和零故障。 文章目录一、设计哲学:网关…...

Dream框架核心概念解析:Handler、Middleware与Router的完美协作
Dream框架核心概念解析:Handler、Middleware与Router的完美协作 【免费下载链接】dream Tidy, feature-complete Web framework 项目地址: https://gitcode.com/gh_mirrors/dre/dream Dream作为一款功能完备的Web框架,其核心架构围绕Handler、Mid…...

深入解析C/C++栈空间:Windows/Linux默认大小、设置方法与溢出防御实战
1. 栈空间:一个被忽视的“内存边界”写C/C代码,尤其是涉及到递归、大数组或者复杂函数调用时,你肯定遇到过“栈溢出”(Stack Overflow)这个老朋友。它不像内存泄漏那样悄无声息,而是直接给你一个程序崩溃&a…...

别再只用默认配置了!GaussDB密码安全策略的这8个参数,DBA必须知道怎么调
GaussDB密码安全策略深度实战:8个关键参数配置指南 在数据库安全管理中,密码策略往往是最容易被忽视却又最常被攻击利用的薄弱环节。许多DBA习惯性地沿用数据库默认配置,殊不知这些默认值可能无法满足企业实际安全需求。GaussDB作为企业级分布…...

MarkdownViewer++:Notepad++终极Markdown实时预览插件完整指南
MarkdownViewer:Notepad终极Markdown实时预览插件完整指南 【免费下载链接】MarkdownViewerPlusPlus A Notepad Plugin to view a Markdown file rendered on-the-fly 项目地址: https://gitcode.com/gh_mirrors/ma/MarkdownViewerPlusPlus 你是否曾在Notepa…...