STM32驱动GY-39监测环境温度,湿度,大气压强,光强度
目录
- 模块简介
- 模块测试
- 接线
- 代码
- 测试现象
- 总结
模块简介
GY-39 是一款低成本,气压,温湿度,光强度传感器模块。工作电压 3-5v,功耗小,安装方便。
其工作原理是,MCU 收集各种传感器数据,统一处理,直接输出计算后的结果,此模块,有两种方式读取数据,即串口 UART(TTL 电平)或者 IIC(2 线)。串口的波特率有 9600bps 与 115200bps,可配置,有连续,询问输出两种方式,可掉电保存设置。可适应不同的工作环境,与单片机及电脑连接。模块另外可以设置单独传感器芯片工作模式,作为简单传感器模块,MCU 不参与数据处理工作。
模块测试
接线
这里使用的是MCU_IIC模式,所以在使用前需要先将S0与GND进行短接(模块默认是UART模式),如图中的蓝色跳线帽短接。

将模块其他需要的线与开发板连接,接线如下:
GY-39—STM32F103C8T6
SCL—PB6
SDA—PB7
STM32—FT232/USB转TTL
TX(PA9)—RX
RX(PA10)—TX
代码
数据计算方法模块的说明手册中已经有具体提出。
数据计算方法:
①光照强度计算方法(当 Byte2=0x15 时,数据:Byte4~Byte7) :
Lux=(前高8位<<24) | (前低8位<<16) | (后高8位<<8) | 后低8位 单位lux
②温度、气压、湿度、海拔,计算方法(当 Byte2=0x45 时):
温度:Byte4~Byte5
T=(高 8 位<<8)|低 8 位
T=T/100 单位℃
气压:Byte6~Byte9
P=(前高 8 位<<24) | (前低 8 位<<16) | (后高 8 位<<8) | 后低 8 位
P=P/100 单位 pa
湿度:Byte10~Byte11
Hum=(高 8 位<<8)|低 8 位
Hum=Hum/100 百分制
海拔:Byte12~Byte13
H=(高 8 位<<8)|低 8 位 单位 m
这是主函数中用于计算其输出值的部分代码:
if(Single_ReadI2C(0xb6,0x04,raw_data,10)){Bme.Temp=(raw_data[0]<<8)|raw_data[1];data_16[0]=(((uint16_t)raw_data[2])<<8)|raw_data[3];data_16[1]=(((uint16_t)raw_data[4])<<8)|raw_data[5];Bme.P=(((uint32_t)data_16[0])<<16)|data_16[1];Bme.Hum=(raw_data[6]<<8)|raw_data[7];Bme.Alt=(raw_data[8]<<8)|raw_data[9];}if(Single_ReadI2C(0xb6,0x00,raw_data,4))data_16[0]=(((uint16_t)raw_data[0])<<8)|raw_data[1];data_16[1]=(((uint16_t)raw_data[2])<<8)|raw_data[3];Lux=(((uint32_t)data_16[0])<<16)|data_16[1];printf("Temp: %.2f DegC ",(float)Bme.Temp/100);printf(" P: %.2f Pa ",(float)Bme.P/100);printf(" Hum: %.2f ",(float)Bme.Hum/100);printf(" Alt: %.2f m\r\n ",(float)Bme.Alt+36);printf("\r\n Lux: %.2f lux\r\n ",(float)Lux/100); delay_ms(200);
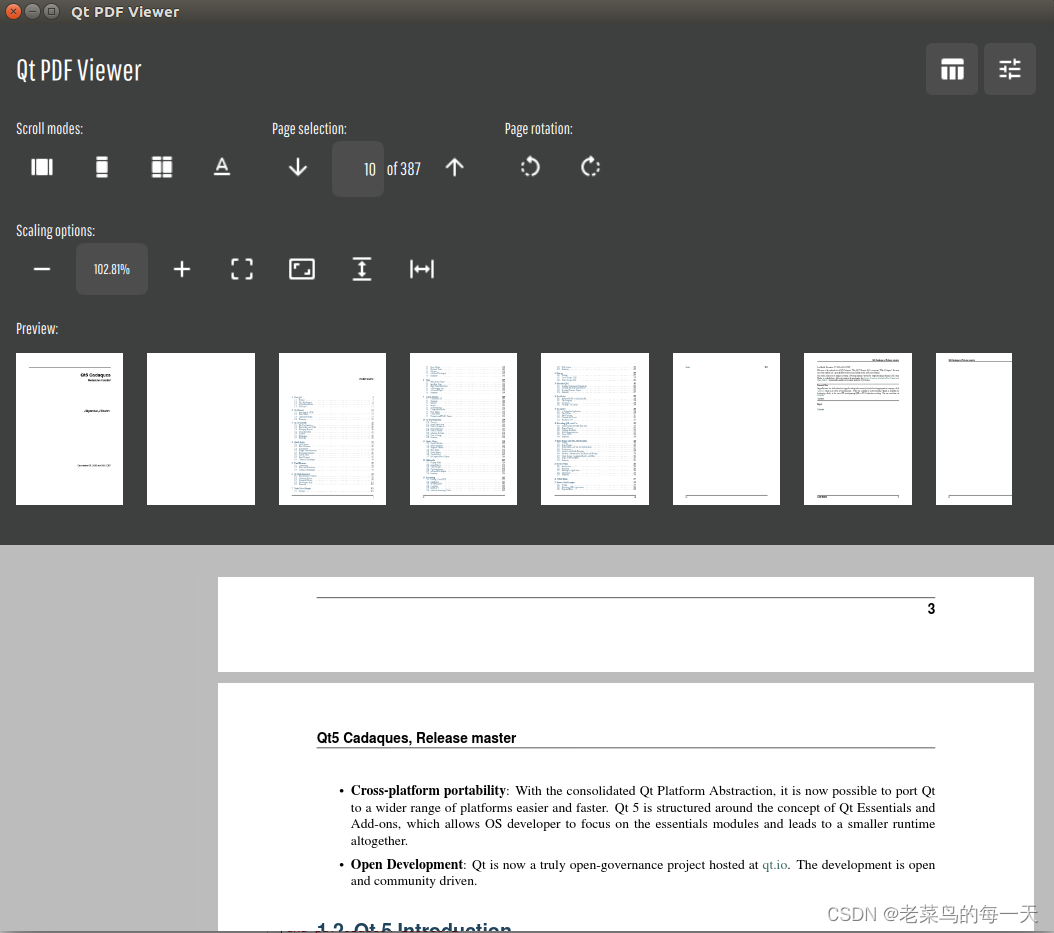
测试现象
连接好上电烧录程序后,可以看到串口的输出数据里已经有温度,大气压强,湿度,海拔和光照强度的值了。

总结
有关代码中海拔的计算可以在平地时候,让高度数据加上或者减去偏差值,让海拔数据等于当地平均海拔。同一地点,气压每天,每个季节都会变化的,如果是测绝对高度,是需要经常校准的。
相关文章:
STM32驱动GY-39监测环境温度,湿度,大气压强,光强度
目录 模块简介模块测试接线代码测试现象 总结 模块简介 GY-39 是一款低成本,气压,温湿度,光强度传感器模块。工作电压 3-5v,功耗小,安装方便。 其工作原理是,MCU 收集各种传感器数据,统一处理&…...
在华为和比亚迪干了5年测试,月薪25K,熬夜总结出来的划水经验.....
先简单交代一下背景吧,某不知名 985 的本硕,17 年毕业加入华为,之后跳槽到了比亚迪,一直从事软件测试的工作。之前没有实习经历,算是5年的工作经验吧。 这5年之间完成了一次晋升,换了一家公司,…...

Mac 使用 scp 上传或下载文件/文件夹
目录 上传文件到远程服务器 scp 本地文件路径 远程用户名远程IP:远程目标目录上传文件夹到远程服务器 scp -r 本地文件夹 远程用户名远程IP:远程目标目录从远程服务器下载文件 scp 远程用户名远程IP:远程文件路径 本地目标目录从远程服务器下…...
Restful 风格
目录 Restful风格创建springboot项目SpringMVC开发Restful接口1、获取所有的员工思路代码RequestMappingGetMapping 2、获取单个员工思路代码注意: 3、删除员工数据思路:代码单个删除批量删除 4、更新员工数据思路: 5、jQuery发送请求发送del…...

LLM 系列 | 21 : Code Llama实战(上篇) : 模型简介与评测
引言 小伙伴们好,我是《小窗幽记机器学习》的小编:卖热干面的小女孩。 个人CSDN首页:JasonLiu1919_面向对象的程序设计,深度学习,C-CSDN博客 今天开始以2篇小作文介绍代码大语言模型Code Llama。上篇主要介绍Code Llama的基本情况并基于Hug…...

积分球荧光光谱测试光电检测方式有哪些优点?
积分球荧光光谱测试是一种测量光通量的方法,其基本原理是将待测光源放入积分球中,在积分球内壁涂以白色漫反射层,光源发出的光经球壁多次反射后,使整个球壁上的照度均匀分布,再通过球壁上的孔投射到光电探测器上的光通…...
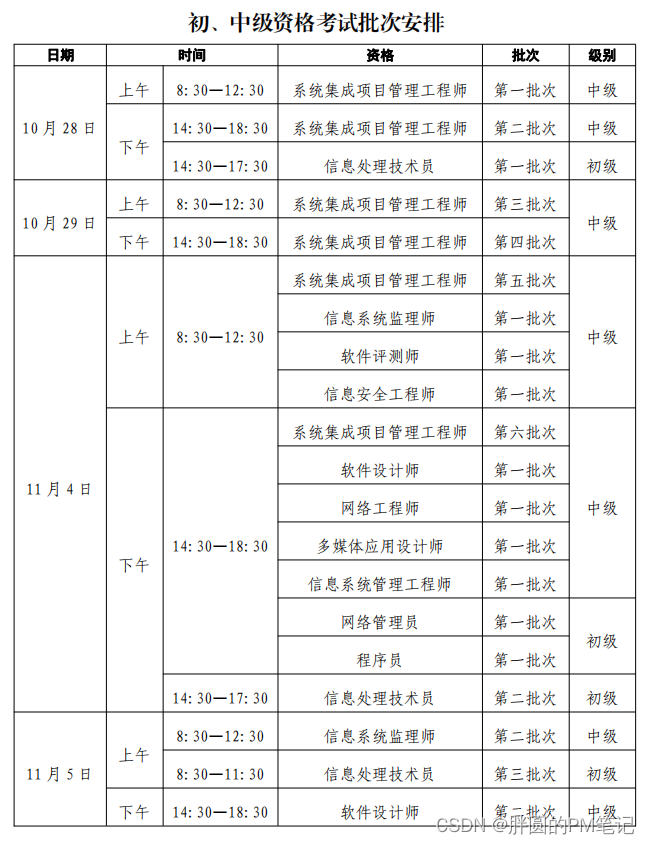
软考考试时间已出!采用连考形式!
2023年下半年计算机技术与软件专业技术资格(水平)考试批次安排已出!下面是具体的考试安排。 通知原文如下:↓↓↓ 按照《2023年下半年计算机技术与软件专业技术资格(水平)考试有关工作调整的通告》&#x…...
深入理解强化学习——学习(Learning)、规划(Planning)、探索(Exploration)和利用(Exploitation)
分类目录:《深入理解强化学习》总目录 学习 学习(Learning)和规划(Planning)是序列决策的两个基本问题。 如下图所示,在强化学习中,环境初始时是未知的,智能体不知道环境如何工作&a…...

大模型LLM相关面试题整理-训练集-训练经验-微调
3 大模型(LLMs)微调 3.1 如果想要在某个模型基础上做全参数微调,究竟需要多少显存? 要确定全参数微调所需的显存量,需要考虑以下几个因素: 模型的大小:模型的大小是指模型参数的数量。通常&…...
qt 实现pdf阅读器
文章目录 概要方案一方案二一、介绍二、编译三、用法本项目代码 概要 在qt程序中,要实现PDF文件浏览,从网上目前找到了两种解决方案,本文主要介绍下着两种方案和适用性。 方案一 这种方法是从https://github.com/develtar/qt-pdf-viewer-l…...
从培训班出来之后找工作的经历,教会了我五件事.....
我是非计算机专业,由于专业不好实习急着就业有过一些失败的工作经历后,跑去参加培训进入IT这行的。 之前在报名学习软件测试之前我也很纠结,不知道怎么选择机构。后面看到有同学在知乎上分享自己的学习经历,当时对我的帮助很大。…...

idea中还原dont ask again
背景 在使用idea打开另外一个项目的时候,一不小心勾选为当前项目而且是不在下次询问,导致后面每次打开新的项目都会把当前项目关闭,如下图所示 下面我们就一起看一下如何把这个询问按钮还原回来 preferences/settings->Appearance&…...

Unity之ShaderGraph如何实现光边溶解
前言 今天我们来实现一个最常见的随机溶剂效果。如下图所示: 光边溶解效果: 无光边效果 主要节点 Simple Noise:根据输入UV生成简单噪声或Value噪声。生成的噪声的大小由输入Scale控制。 Step:对于每个组件,如果输…...

Go语言和Python语言哪个比较好?
目录 1、性能 2、开发效率和易用性 3、社区支持 4、语法 5、其他因素 总结 Go语言和Python语言都是非常优秀的编程语言,它们各自具有不同的优势和适用场景。在选择哪种语言更适合您的项目时,需要考虑多个方面,包括性能、开发效率、可读…...
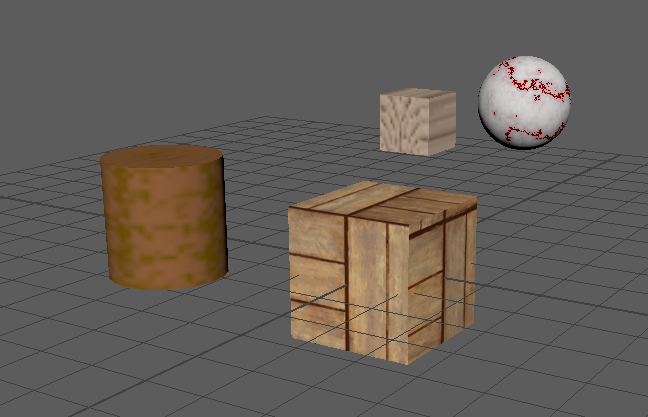
MAYA教程之模型的UV拆分与材质介绍
什么是UV 模型制作完成后,需要给模型进行贴图,就需要用到UV功能 UV编译器介绍 打开UI编译器 主菜单有一个 UV->UV编译器,可以点击打开 创建一个模型,可以看到模型默认的UV UV编译器功能使用 UV模式的选择 在UV编译器中…...
)
vscode调试container(进行rocksdb调试)
vscode调试container(进行rocksdb调试) 参考链接: https://blog.csdn.net/qq_29809823/article/details/128445308#t5 https://blog.csdn.net/qq_29809823/article/details/121978762#t7 使用vscode中的插件dev containners->点击左侧的…...

从恐怖到商机:2023万圣节跨境电商如何打造鬼魅消费体验?
又到了一年一度的糖果、恐怖装扮和万圣节派对的时候!随着10月底的日子临近,人们开始为庆祝万圣节做各种各样的准备。而对于跨境电商来说,这个节日也是一个独特的商机,能够在全球市场上推广各种各样的节日相关商品。Adobe Digital …...
修炼k8s+flink+hdfs+dlink(五:安装dockers,cri-docker,harbor仓库,k8s)
一:安装docker。(所有服务器都要安装) 安装必要的一些系统工具 sudo yum install -y yum-utils device-mapper-persistent-data lvm2添加软件源信息 sudo yum-config-manager --add-repo https://mirrors.aliyun.com/docker-ce/linux/cent…...
从实时数据库转战时序数据库,他陪伴 TDengine 从 1.0 走到 3.0
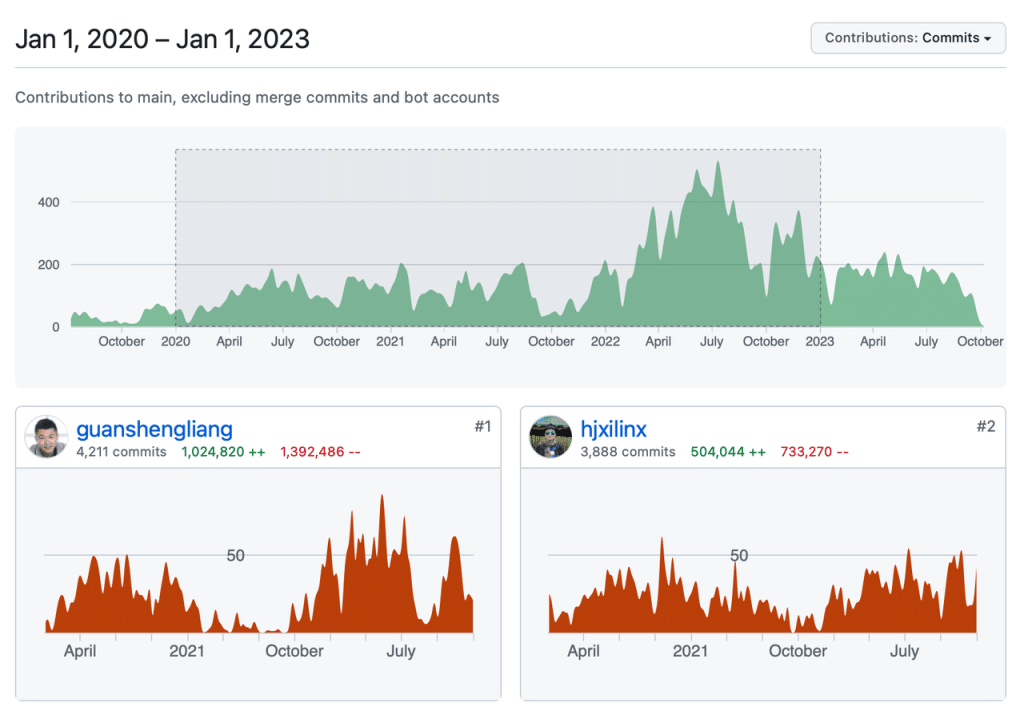
关于采访嘉宾 在关胜亮的学生时代,“神童”这个称号如影随形,很多人初听时会觉得这个称谓略显夸张,有些人还会认为这是不是就是一种调侃,但是如果你听说过他的经历,就会理解这一称号的意义所在了。 受到教师母亲的影…...
颠覆传统有线通讯,虹科IO-Link wireless解决方案让智能机床的旋转部件实现可靠低延迟无线通信
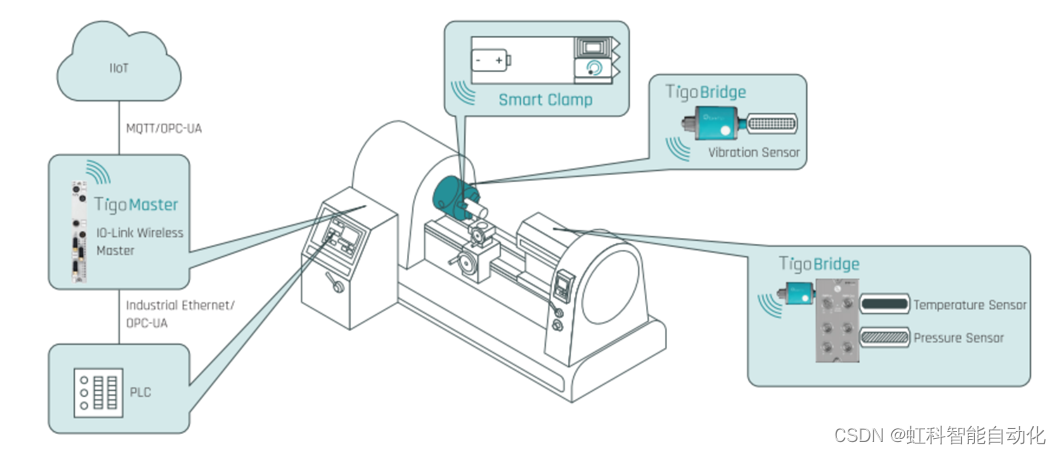
作为新工业革命的一部分,传统机床正迅速发展成为智能机床。在工业4.0技术的推动下,新的创新应用使机床的效率和功能达到了更高的水平。要实现这些功能,需要在机床上集成传感器和执行器,以提供实时数据和自动化控制。然而ÿ…...

【Autosar】MCAL - 从零到一的工程配置实战
1. 工程创建:从零搭建MCAL开发环境 第一次打开Autosar配置工具时,面对满屏的选项确实容易发懵。记得我刚接触MCAL配置时,光是工程创建就反复折腾了好几次。下面我就把踩过的坑和验证过的正确姿势分享给大家。 创建新工程时,工程名…...

深度解析causal-conv1d:CUDA加速的因果深度卷积专业指南
深度解析causal-conv1d:CUDA加速的因果深度卷积专业指南 【免费下载链接】causal-conv1d Causal depthwise conv1d in CUDA, with a PyTorch interface 项目地址: https://gitcode.com/gh_mirrors/ca/causal-conv1d causal-conv1d是一个专为时间序列数据优化…...

如何永久保存微信聊天记录?WeChatMsg让你轻松实现数据自主管理
如何永久保存微信聊天记录?WeChatMsg让你轻松实现数据自主管理 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/…...

别再死记硬背了!用这个商品库存表案例,5分钟搞懂HTML表格的rowspan属性
别再死记硬背了!用商品库存表案例5分钟掌握HTML表格的rowspan属性 每次看到HTML表格代码里那些rowspan和colspan属性就头疼?别担心,今天我们不谈枯燥的语法定义,而是通过一个真实的商品库存管理案例,带你理解rowspan的…...

GBFR Logs:游戏数据采集与实时分析引擎的架构深度解析
GBFR Logs:游戏数据采集与实时分析引擎的架构深度解析 【免费下载链接】gbfr-logs GBFR Logs lets you track damage statistics with a nice overlay DPS meter for Granblue Fantasy: Relink. 项目地址: https://gitcode.com/gh_mirrors/gb/gbfr-logs 在游…...

【Perplexity AI高手速成指南】:20年AI工程师亲授7大核心技能与3个避坑红线
更多请点击: https://kaifayun.com 第一章:Perplexity AI平台核心架构与能力边界 Perplexity AI 并非传统意义上的开源模型托管平台,而是一个以“答案溯源”为设计哲学的智能问答引擎。其底层融合了多阶段检索增强生成(RAG&#…...

无王无帝定乾坤,来自田间第一人 海棠山铁哥持道定天下
无王无帝定乾坤 ——来自田间第一人千古以来,世人皆认为天下安定、乾坤稳固,必靠帝王集权、朝堂号令、强权治世。 王朝兴替往复,霸业起落无常,靠权柄维系的盛世终难长久,靠杀伐平定的世道终存隐患。 权力会更迭&#x…...

STM32F407移植EasyFlash:嵌入式Flash键值存储与磨损均衡实战
1. 项目概述:为什么要在STM32F407上折腾EasyFlash?最近在做一个基于STM32F407的物联网终端设备,功能上需要记录一些运行参数、用户配置,还得在意外断电后能恢复现场。最开始想着用片内Flash模拟EEPROM,自己写读写擦除逻…...

MoneyPrinterPlus智能视频创作工具实战指南:从零到批量生产的完整流程
MoneyPrinterPlus智能视频创作工具实战指南:从零到批量生产的完整流程 【免费下载链接】MoneyPrinterPlus AI一键批量生成各类短视频,自动批量混剪短视频,自动把视频发布到抖音,快手,小红书,视频号上,赚钱从来没有这么容易过! 支持本地语音模型chatTTS,fasterwhispe…...

保姆级教程:在华大HC32L136上驱动SPI屏,用DMA发送提升刷屏效率
华大HC32L136单片机SPI屏DMA驱动实战指南 在物联网设备和智能硬件开发中,流畅的图形界面往往能大幅提升用户体验。而实现这一目标的关键,在于高效稳定的显示驱动设计。本文将深入探讨如何利用华大半导体HC32L136单片机的SPI接口与DMA控制器,构…...