FTC局部路径规划代码分析
前置知识:
costmap_2d::Costmap2DROS costmap;
costmap_2d::Costmap2DROS 是一个ROS包中提供的用于处理2D成本地图的类。它是一个高级的接口,通常用于与ROS导航栈中的导航规划器和本地路径跟踪器等模块进行集成。
costmap 是一个指向 Costmap2DROS 对象的指针。通常,通过这个指针,你可以访问与导航和路径跟踪相关的成本地图信息,以及执行一些与导航相关的操作,如查询障碍物信息、获取机器人的当前全局位置等。这个指针指向了整个ROS导航栈中的成本地图管理器。
costmap_2d::Costmap2D costmap_map_;
costmap_2d::Costmap2D 是一个用于表示二维成本地图的类,通常用于底层的地图管理和处理。
costmap_map_ 是一个指向 Costmap2D 对象的指针。这个指针通常用于直接访问成本地图的数据,如地图的大小、分辨率、栅格信息以及每个栅格的成本值等。这个指针通常用于执行与成本地图的低级操作,如路径规划和避障算法。
costmap->getOrientedFootprint(std::cector<geometry_msgs::Point>& oriented_footprint)
构建机器人在当前姿态下的足迹,结果将存储在参数 oriented_footprint 中, 这个函数可以返回机器人当前位置的足迹, 获取的是一个机器人在世界坐标系下的坐标, 通常用于碰撞检测或生成局部代价地图
costmap->getRobotFootprint()
获取机器人的轮廓, 表现为一系列std::vector<geometry_msgs::Point>的形式
costmap->getRobotFootprintPolygon()
获取机器人的轮廓, 表现为一个凸多边形, geometry_msgs::Polygon 类型
initialize(std::string name, tf2_ros::Buffer* tf, costmap_2d::Costmap2DROS* costmap_ros)
参数:
name
tf
costmap_ros 一个ROS的上层接口
发布者:
global_plan_pub : 将global_planner中发过来的路径不经过任何处理发布到”/ftc_local_planner/global_plan”
global_point_pub: 发布当前控制点, 即ftc代码判断的机器人的位置, 由 current_index控制
obstacle_marker_pub: 发布障碍物的信息, 当靠近障碍物时, rviz中的障碍物会由绿色变为黄色, 当障碍物变为红色时, 机器人停止移动
setPlan(const std::vector<geometry_msgs::PoseStamped> &plan)
参数:
plan 包含位姿信息的向量, 从起始点指向结束点
逻辑:
- 定义当前状态 PRE_ROTATE
- 复制plan到global_plan
- 如果规划中大于两个点(路径规划存在), 则将倒数第二个点的朝向改为倒数第三个点的朝向
global_plan[global_plan.size() - 2].pose.orientation = global_plan[global_plan.size() - 3].pose.orientation; - 创建导航路径
nav_msgs::Path path; - 将收到的路径plan原封不动放到path.poses中
- 发布path到”/ftc_local_planner/global_plan”
distanceLookahead() #未知
double FTCPlannerROS::distanceLookahead(){if (global_plan.size() < 2){return 0;}Eigen::Quaternion<double> current_rot(current_control_point.linear());Eigen::Affine3d last_straight_point = current_control_point;for (uint32_t i = current_index + 1; i < global_plan.size(); i++){tf2::fromMsg(global_plan[i].pose, last_straight_point);// check, if direction is the same. if so, we add the distanceEigen::Quaternion<double> rot2(last_straight_point.linear());if (abs(rot2.angularDistance(current_rot)) > config.speed_fast_threshold_angle * (M_PI / 180.0)){break;}}return (last_straight_point.translation() - current_control_point.translation()).norm();}
void FTCPlannerROS::update_control_point(double dt)
作用:
根据当前状态确定执行内容
状态: PRE_ROTATE, FOLLOWING, POST_ROTATE, WAITTING_FOR_GOAL_APPROACH, FINISHED
参数:
dt: 当前时间 - 上次执行的时间
逻辑: current_control_point: map坐标系下的点
local_control_point: base_link坐标系下的点
-
判断当前执行状态
- PRE_ROTATE
- 将global_plan[0].pose存入current_control_point
- FOLLOWING
- 计算前视距离 straight_dist=distanceLookahead()
- 如果前视距离大于满速行进的阈值, 则全速前进
- 若目标速度大于当前速度, 则根据配置的加速度对当前速度进行提升
- 如果: 需要移动的距离大于零, 同时需要转动的角度大于零且当前点不为全局路径规划的倒数第二个点, 进入循环
- 从全局规划中获取下两个点, currentPose以及nextPose
- 计算两个点的距离 pose_distance
- 如果两个点之间的距离小于等于0, 则警告: 跳过重复点(Skipping duplicate point in global plan)
- 通过current_progress(0-1之间的数), 计算剩余距离与角度
- 如果剩余的距离和角度可以在当前时间步内到达(
remaining_distance_to_next_pose < distance_to_move*并且*remaining_angular_distance_to_next_pose < angle_to_move),则将机器人移动到下一个位置,更新**current_progress,减少distance_to_move和angle_to_move** - 如果无法在当前时间步内到达下一个位置,则更新**
current_progress**以确保机器人在下一个时间步内能够到达下一个位置
- 最后,通过插值计算机器人在当前时间步的控制点位置和方向,然后将其存储在**
current_control_point**中,以供后续控制使用
- POST_ROTATE
- 将global_plan中的最后一个点保存到current_control_point中
- WAITTING_FOR_GOAL_APPROACH
- break
- FINISHED
- break
- PRE_ROTATE
-
创建目标点, viz用于发布current_control_point的坐标
-
通过
tf::doTransform(currnet_control_point, local_control_point, map_to_base)转化current_control_point的坐标到 local_control_point. 注: current_control_point为基于map的全局坐标, 而local_control_point通过下面 两行, 将map全局坐标系下的点, 转化为从base_link到map的局部变换的点auto map_to_base = tf_buffer->lookupTransform("base_link", "map", ros::Time(), ros::Duration(1.0)); tf2::doTransform(current_control_point, local_control_point, map_to_base); -
计算误差 lat_error(横向误差), lon_error(纵向误差), angle_error(角度误差)
update_planner_state()
逻辑:
- 根据当前状态更新下一个状态
- PRE_ROTATE
- 判断setPlan的时间是否超时, 是, ERROR: Timeout in PRE_ROTATE phase; is_crashed=true; return FINISHED;
- 判断angle_error是否小于max_goal_angle_error, 是, INFO: FTCLocalPlannerROS: PRE_ROTATE finished return FOLLOWING
- break
- FOLLOWING
- 计算distance = local_control_point.translation().norm()
- 判断distance是否大于最大追踪距离max_follow_distance 是, ERROR: FTCLocalPlannerROS: Robot is far away from global plan. distance is_crashed=true return FINISHED
- 判断current_index是否为倒数第二个点 是, INFO: FTCLocalPlannerROS: switching planner to position mode return WAITING_FOR_GOAL_APPROACH
- break
- WAITING_FOR_GOAL_APPEOACH
- 计算distance = local_control_point.translation().norm()
- 判断是否超时 是, WARN: FTCLocalPlannerROS: Could not reach goal position return POST_ROTATE
- 判断距离是否小于max_goal_distance_error 是, INFO: FTCLocalPlannerROS: Reached goal position. return POST_ROTATE
- break
- POST_ROTATE
- 判断是否超时 是, WARN: FTCLocalPlannerROS: Could not reach goal rotation return FINISHED
- 判断角度误差是否小于max_goal_angle_error 是, INFO: FTCLocalPlannerROS: POST_ROTATE finished. return FINISHED
- break
- FINISHED
- break
- PRE_ROTATE
- return current_state
bool checkCollision(int max_points)
参数:
max_points 向前预判的点的个数, 根据实际global_plan中每一个点之间的距离设置max_points
例如: 机器人当前点为 global_plan[current_index], 而max_points则负责检测从global_plan[current_index]到global_plan[current_index + max_points]这段路径中间是否有障碍物, 有则为true
逻辑:
- 判断是否开启了障碍检测
- 如果global_plan.size() < max_points 则将最大值设为路径中点的总数
- 判断是否开启了obstacle_footprint 使用实际足迹检测碰撞
costmap->getOrientedFootprint(footprint);获取当前机器人足迹, 保存到footprint- 遍历footprint, 将每一个点从world转换到map
- 获取每一个点的代价
- 判断当前代价是否大于既定的致命值
costs >= costmap_2d::LETHAL_OBSTACLE - 是, WARN: FTCLocalPlannerROS: Possible collision of footprint at actual pose. Stop local planner. return true
- for (int i = 0; i < max_points; i++) 判断前视距离是否有障碍物
- 获取current_index + i 点的坐标
- 将该坐标转换到map坐标系
- 获取该坐标的代价值
- 判断 costs >127 && costs > previous_cost 是, WARN(FTCLocalPlannerROS: Possible collision. Stop local planner.) return true
- 更新previous_cost为costs
- 开始下个循环
- return false
void calculate_velocity_commands(double dt, geometry_msgs::Twist &cmd_vel)
参数:
dt 现在时间与上次执行时间之差
cmd_vel 速度置零
逻辑:
- 判断current_state == FINISHED || is_crashed 速度置零, 返回
- 计算PID参数
- 判断current_state==FOLLOWING
- 通过PID计算线速度
- 如果线速度 < 0 且 forward_only 为true 速度归零
- 限制线速度在 -max_cmd_vel_speed 到 max_cmd_vel_speed之间
- cmd_vel.linear.x = lin_speed
- 角速度的运算分两部分, current_state == FOLLOWING以及current_state == PRE_ROTATE
- 判断current_state==FOLLOWING
- 通过PID计算角速度
- 限制角速度
- cmd_vel.angular.z = ang_speed
- 否则(也就是机器人处于PRE_ROTATE阶段)
- 通过PID计算角速度
- 限制角速度
- cmd_vel.angular.z = ang_speed
- 震荡检测, 如果震荡, 则角速度拉满
- 判断current_state==FOLLOWING
bool computeVelocityCommands(geometry_msgs::Twist &cmd_vel)
参数:
cmd_vel 速度
逻辑:
- 计算dt 执行该代码时的时间 - 上次执行改代码的时间
- 判断是否碰撞(is_crashed) 是, 速度置零, return false
- 判断是否完成(current_state==FINISHED), 是, 速度置零, return true
- 根据dt, 更新控制点
update_control_point(dt) - 更新当前状态
auto new_planner_state = update_planner_state() - 判断: 新状态与当前状态是否一致 是, INFO: FTCLocalPlannerROS: Switching to state 更新state_entered_time (用于判断一个状态是否会超时) 更新当前状态为新状态
- 判断是否存在碰撞 checkCollision(obstacle_lookahead) 是, 速度置零 is_crashed = true return false
- 计算速度 calculate_velocity_commands(dt, cmd_vel)
相关文章:

FTC局部路径规划代码分析
前置知识: costmap_2d::Costmap2DROS costmap; costmap_2d::Costmap2DROS 是一个ROS包中提供的用于处理2D成本地图的类。它是一个高级的接口,通常用于与ROS导航栈中的导航规划器和本地路径跟踪器等模块进行集成。 costmap 是一个指向 Costmap2DROS 对象的指针。通…...
SpringBoot集成Activiti7
SpringBoot集成Activiti7 SpringBoot版本使用2.7.16 <parent><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-parent</artifactId><version>2.7.16</version><relativePath/> <!-- lookup…...
25.1 MySQL SELECT语句
1. SQL概述 1.1 SQL背景知识 1946年, 世界上诞生了第一台电脑, 而今借由这台电脑的发展, 互联网已经成为一个独立的世界. 在过去几十年里, 许多技术和产业在互联网的舞台上兴衰交替. 然而, 有一门技术却从未消失, 甚至日益强大, 那就是SQL.SQL(Structured Query Language&…...

【VSCode】Windows环境下,VSCode 搭建 cmake 编译环境(通过配置文件配置)
除了之前的使用 VSCode 插件来编译工程外,我们也可以使用配置文件来编译cmake工程,主要依赖 launch.json 和 tasks.json 文件。 目录 一、下载编译器 1、下载 Windows GCC 2、选择编译器路径 二、配置 debug 环境 1、配置 lauch.json 文件 2、配置…...
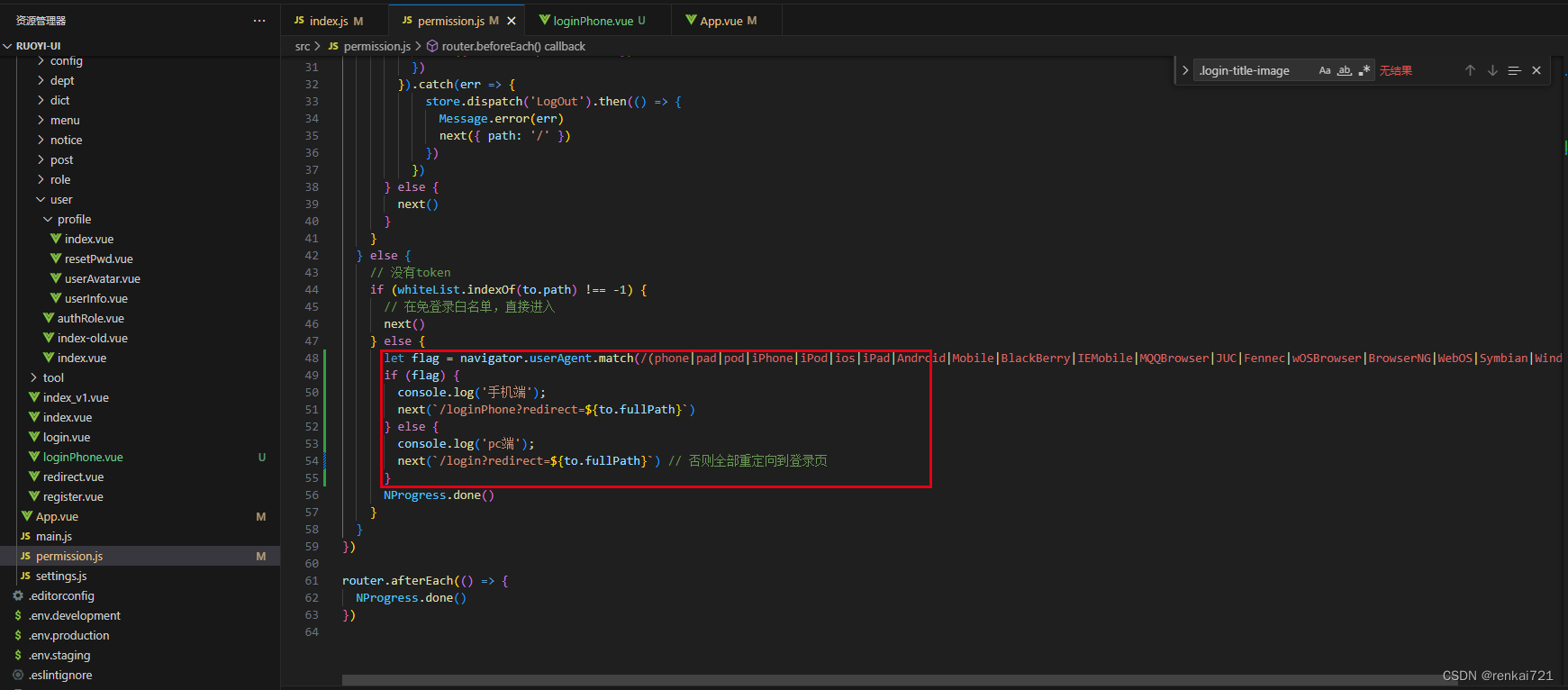
useragent识别访问设备
背景需求 ruoyi框架,前后端分离。现在要在用户访问的时候根据不同的设备跳转到不同的登录页面。 教程 router/index.js 修改src/router/index.js,在这里增加自己的要跳转的页面 permission.js 在白名单中添加自己的登录页面 增加以下识别的代码 le…...

紫光同创FPGA实现UDP协议栈网络视频传输,带录像和抓拍功能,基于YT8511和RTL8211,提供2套PDS工程源码和技术支持
目录 1、前言免责声明 2、相关方案推荐我这里已有的以太网方案紫光同创FPGA精简版UDP方案紫光同创FPGA带ping功能UDP方案紫光同创FPGA精简版UDP视频传输方案 3、设计思路框架OV5640摄像头配置及采集数据缓冲FIFOUDP协议栈详解MAC层发送MAC发送模式MAC层接收ARP发送ARP接收ARP缓…...
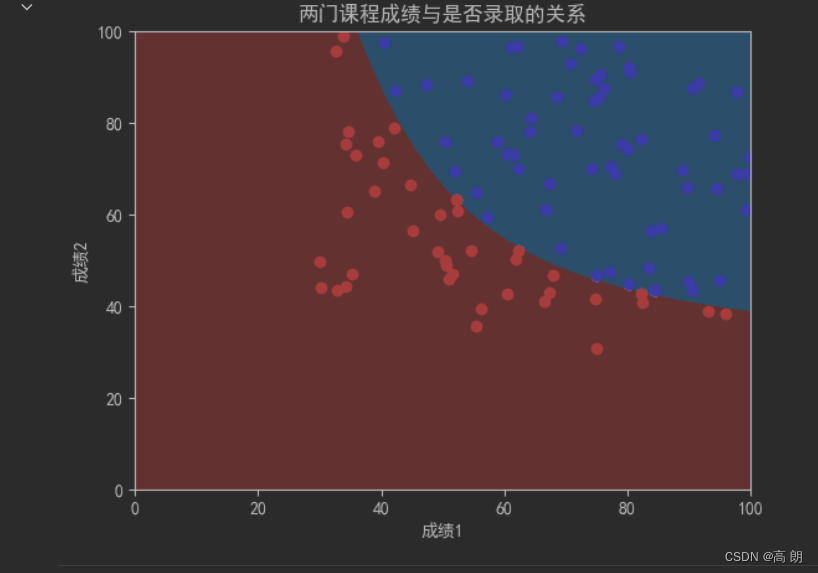
【机器学习】逻辑回归
文章目录 逻辑回归定义损失函数正则化 sklearn里面的逻辑回归多项式逻辑回归 逻辑回归 逻辑回归,是一种名为“回归”的线性分类器,其本质是由线性回归变化而来的,一种广泛使用于分类问题中的广义回归算法。 线性回归是机器学习中最简单的的…...
DITA-OT 4.0新特性 - PDF themes,定制PDF样式的新方法
随着DITA-OT 4.0的发布,它提供了一种新的定制PDF样式方法,这种方法就是PDF theme。这篇文章来聊一聊这种定制PDF输出的新方法和实验结果。 在进入PDF theme细节之前,为各位读者梳理一下DITA-OT将DITA和Markdown发布成PDF的几种方法。 - 1 …...

MySQL 8.0 OCP认证精讲视频、环境和题库之四 多实例启动 缓存、事务、脏读
一、配置第一个mysqld服务 1、编辑选项文件,指定以下选项: [mysqld] basedir/mysql80 datadir/mysql80/data1 socket/mysql80/data1/mysqld.sock pid-file/mysql80/data1/mysqld.pid log-error/mysql80/dat…...
对代码感兴趣 但不擅长数学怎么办——《机器学习图解》来救你
目前,该领域中将理论与实践相结合、通俗易懂的著作较少。机器学习是人工智能的一部分,很多初学者往往把机器学习和深度学习作为人工智能入门的突破口,非科班出身的人士更是如此。当前,国内纵向复合型人才和横向复合型人才奇缺;具有…...

【EI会议征稿】第三届大数据、信息与计算机网络国际学术会议(BDICN 2024)
第三届大数据、信息与计算机网络国际学术会议(BDICN 2024) 2024 3rd International Conference on Big Data, Information and Computer Network 第三届大数据、信息与计算机网络国际学术会议(BDICN 2024)定于2024年1月12-14日在…...
【Arduino+ESP32+腾讯云+sg90】强制门户+腾讯云控制开关灯
作者有话说 博主对于Arduino开发并没有基础,但是为了实现更加方便的配网,这几天一直在尝试用ESP32-12F(因为手头刚好有一个,其他的也可以)来做远程开关灯!不知道大家是否注意到,上一篇利用STM32…...
windows中elasticsearch7中添加用户名密码验证
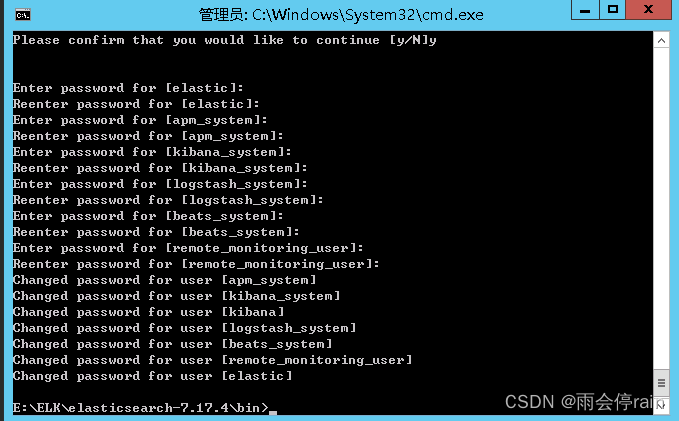
1.找到elsatic的bin目录输入cmd 2.生成ca证书 输入 elasticsearch-certutil ca 在es7根目录生成ca证书,输入密码时直接回车即可,否则后面会报错 Please enter the desired output file [elastic-stack-ca.p12]: #这里直接回车即可 Enter password for…...

linux安装达梦数据库(命令行安装)
安装达梦数据库 创建安装用户 1,创建安装用户组dinstall [rootdmDMServer1 ~]# groupadd -g 12345 dinstallgroupadd : 创建组 -g : 指定组id(GID) 12345: 指定的组名称 dinstall : 组名 2,创建安装用户dmdba [rootdmDMSe…...

Flutter——最详细(CustomScrollView)使用教程
CustomScrollView简介 创建一个 [ScrollView],该视图使用薄片创建自定义滚动效果。 [SliverList],这是一个显示线性子项列表的银子列表。 [SliverFixedExtentList],这是一种更高效的薄片,它显示沿滚动轴具有相同范围的子级的线性列…...

解决容器内deepspeed微调大模型报错
解决容器内deepspeed微调大模型报错:[launch.py:315:sigkill_handler] Killing subprocess 问题描述:解决办法 问题描述: 在容器中用deepspeed微调百川大模型2时,出现上述错误,错误是由于生成容器时,共享内…...
UE 插件模块引用
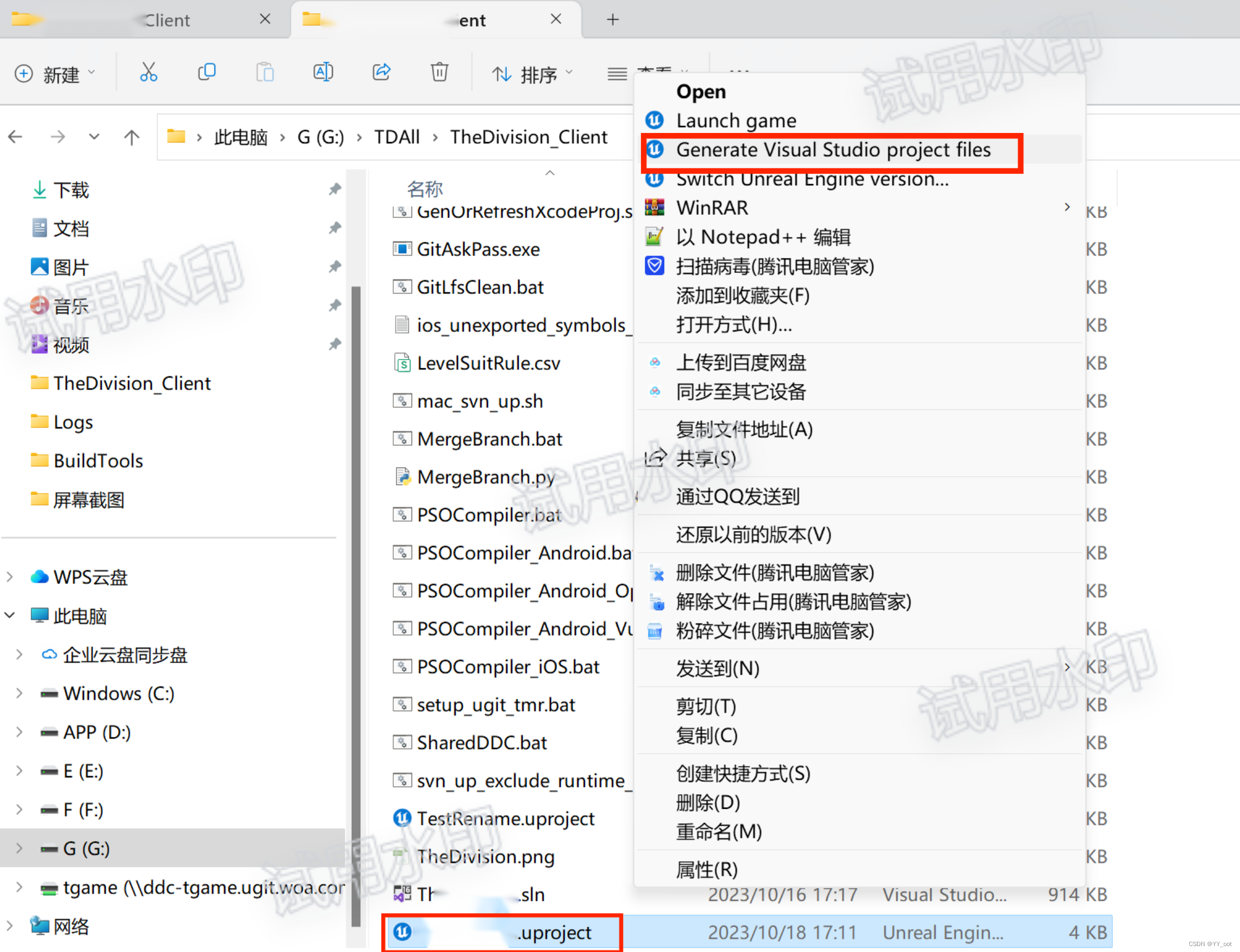
如Plugons中的模块A想要引用模块B: 1、模块A中的.uplugin文件加入↓ 2、模块A中的.Build.cs文件加入↓ 3、在模块A需要用到模块B的地方直接include 4、重新generate Project 5、重新编译 注意两个模块之间不能循环引用...
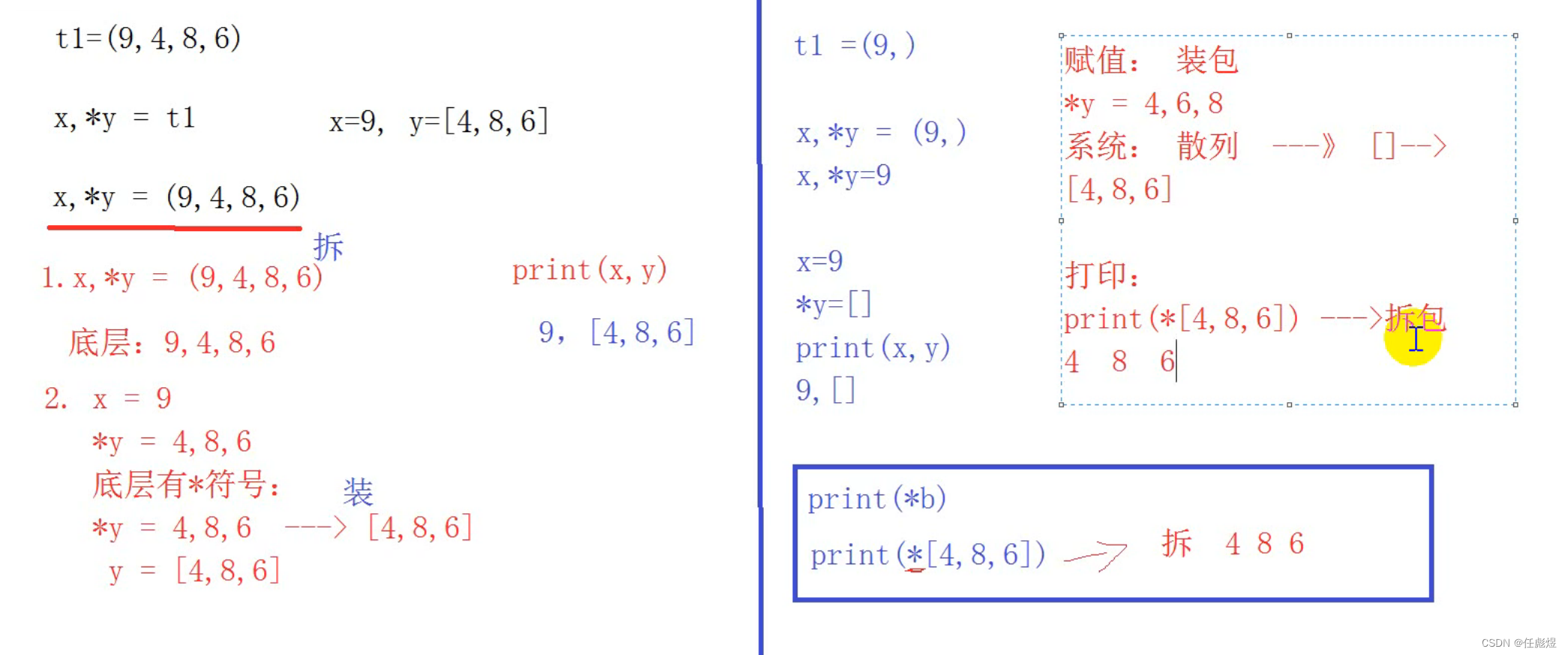
python元组、拆包和装包
注意 元组不能修改元素 元组:如果元素为字符串且元素为1个,必须加一个, ********* t1 (aa,) 下标和切片 in not in for ... in ... 元组转为列表 拆包、装包...

1-Docker安装MySQL8.0
1 背景知识记录 1.1 MySQL 的基本配置记录 MySQL的配置文件目录(/etc/mysql): root2dd6033b5c17:/etc/mysql# pwd /etc/mysql root2dd6033b5c17:/etc/mysql# ls conf.d my.cnf my.cnf.fallback MySQL的data文件目录(/var/lib/my…...

配电房智能化改造在加油站等的应用
随着科技的发展和智能化趋势的推进,对加油站配电房进行智能化改造成为了一个必然的选择。智能化改造不仅可以提高加油站的工作效率,减少事故发生率,还可以实现能源的合理利用,提高经济效益。 力安科技加油站智能化改造升级是一种高…...

STC32G单片机开发实战:GPIO模式配置与寄存器详解
1. STC32G单片机GPIO基础认知 第一次拿到STC32G开发板时,我习惯性地想用STM32那套HAL库来操作GPIO,结果发现根本行不通。这就像拿着汽车钥匙去开保险箱,虽然都是"开锁",但机制完全不同。STC32G作为增强型8051架构单片机…...

HPM6750 LVGL性能优化:利用TCM与DMA突破嵌入式图形内存瓶颈
1. 项目概述:当LVGL遇上HPM6750,一场关于性能的极限探索最近在嵌入式图形界面开发的圈子里,一个话题热度很高:如何在HPM6750这颗高性能RISC-V MCU上,让LVGL的刷屏性能再上一个台阶?这听起来像是一个常规的优…...

3步掌握CSDN博客下载器:革命性批量下载与智能离线阅读终极方案
3步掌握CSDN博客下载器:革命性批量下载与智能离线阅读终极方案 【免费下载链接】CSDNBlogDownloader 项目地址: https://gitcode.com/gh_mirrors/cs/CSDNBlogDownloader 在信息时代,技术博客是我们获取知识的重要窗口,但网络内容的不…...

终极免费Steam创意工坊下载器:3分钟快速上手WorkshopDL完整指南
终极免费Steam创意工坊下载器:3分钟快速上手WorkshopDL完整指南 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 你是否在Epic Games Store或GOG平台购买了游戏&…...

抖音批量下载神器:一键保存多个创作者的所有视频作品
抖音批量下载神器:一键保存多个创作者的所有视频作品 【免费下载链接】douyinhelper 抖音批量下载助手 项目地址: https://gitcode.com/gh_mirrors/do/douyinhelper 在当前短视频内容爆炸的时代,抖音汇聚了无数创意视频和优质内容。无论是学习舞蹈…...

CVPR2021明星算法LoFTR实战:在Ubuntu 20.04上从零搭建Python 3.7+Pytorch 1.6.0环境,跑通第一个图像匹配Demo
CVPR2021明星算法LoFTR实战:在Ubuntu 20.04上从零搭建Python 3.7Pytorch 1.6.0环境,跑通第一个图像匹配Demo 计算机视觉领域每年都会涌现出大量创新算法,而CVPR2021上发表的LoFTR(Detector-Free Local Feature Matching with Tran…...

如何用 OpenAPI Generator CLI 自动生成TypeScript Angular客户端
如何用 OpenAPI Generator CLI 自动生成TypeScript Angular客户端 【免费下载链接】openapi-generator-cli A node package wrapper for https://github.com/OpenAPITools/openapi-generator 项目地址: https://gitcode.com/gh_mirrors/op/openapi-generator-cli OpenAP…...

Page Assist终极指南:在浏览器侧边栏运行本地AI模型的完整解决方案
Page Assist终极指南:在浏览器侧边栏运行本地AI模型的完整解决方案 【免费下载链接】page-assist Use your locally running AI models to assist you in your web browsing 项目地址: https://gitcode.com/GitHub_Trending/pa/page-assist Page Assist是一款…...
实战:从自然行为到工程优化)
【智能算法】长鼻浣熊优化算法(COA)实战:从自然行为到工程优化
1. 长鼻浣熊优化算法(COA)初探 第一次听说长鼻浣熊优化算法(COA)时,我正为一个工业参数优化问题头疼不已。传统遗传算法在这个问题上陷入了局部最优,粒子群优化又收敛得太快。直到看到2023年M Dehghani团队…...
专栏近期有大量优惠 还请多多点一下关注 加油 谢谢 你的鼓励是我前行的动力 谢谢支持 加油 谢谢)
项目介绍 基于java+vue的校园舆情监测与预警系统设计与实现(含模型描述及部分示例代码)专栏近期有大量优惠 还请多多点一下关注 加油 谢谢 你的鼓励是我前行的动力 谢谢支持 加油 谢谢
基于javavue的校园舆情监测与预警系统设计与实现的详细项目实例 请注意此篇内容只是一个项目介绍 更多详细内容可直接联系博主本人 或者访问对应标题的完整博客或者文档下载页面(含完整的程序,GUI设计和代码详解) 校园舆情监测与预警系统…...