[论文笔记] SurroundOcc: Multi-Camera 3D Occupancy Prediction for Autonomous Driving
Wei, Yi, et al. “Surroundocc: Multi-camera 3d occupancy prediction for autonomous driving.” Proceedings of the IEEE/CVF International Conference on Computer Vision. 2023.
重点记录
- 将占用网格应用到多个相机构成的3D空间中;
- 使用BEVFormer中的方法获取3D特征, 然后使用交叉熵损失计算loss;
- 和BEVFormer区别是BEV中z轴高度为1, 这里为获取3D特征不能设置为1, 文中为16;
- 注意会生成不同尺度的3D特征, 会在每个尺度上做一个监督;
- 提出了稠密占用网格语义标签生成方法;
- 分离lidar点云中的静态场景和动态目标为两个集合
- 将静态场景转换到参考坐标系中
- 将运动目标归一化到相对坐标系中
- 根据当前帧pose从参考坐标系中恢复静态场景
- 根据当前帧中的物体ID将运动目标填充回来
- 对当前恢复并填充完的点云进行泊松重建
- 用最近邻给稠密给标签, 体素化得到占用网格
稠密语义标签生成
Needs
- lidar 点云
- lidar 点云bbox标注, 需要有类别和tracking ID
- lidar 分割标注 / 或者图像分割标注
步骤
场景划分
- 一个场景中的所有点云根据bbox标注划分为静态场景 P s P_s Ps 和动态目标 P o P_o Po 两个集合, 分割标注和静态场景处理相似, 记为 P s s e g P^{seg}_s Psseg, 注意: 只有关键帧才有语义标签
- 静态场景, 分割标注所有点云变换到参考坐标系(通常为场景开始帧), 然后将所有点云合并
- 动态目标点云按照tracking ID分组, 每组中的为不同frame中物体, 假如有物体1在场景中出现10帧,可以表示为 {1: [frame_i_pts, …]}, 这里的frame_i_pts表示在第i帧中出现的bbox框中的点云, 并且需要将frame_i_pts点云归一化操作, 1.bbox最小点作为坐标原点 2.根据yaw角旋转至y轴正方形; 然后将所有场景中物体点云合并, 得到{1: pts1, …}
- 动态目标 P o P_o Po 中点云根据tracking ID分别填充到静态场景 P s P_s Ps 和分割标注 P s s e g P^{seg}_s Psseg中, 得到稠密点云
- 注意: 根据bbox将框外的点云删除
获取当前帧稠密标签
- 根据当前帧位姿将静态场景 P s P_s Ps , 分割标注 P s s e g P^{seg}_s Psseg 变换到当前帧中, 并根据设置的点云范围裁切, 记为 P c u r P_{cur} Pcur 和 P c u r s e g P^{seg}_{cur} Pcurseg
- 将 P c u r P_{cur} Pcur转换成mesh, 然后使用泊松重建, 再离散化得到占用网格(体素), 此步骤用来填充空洞
- 根据 P c u r s e g P^{seg}_{cur} Pcurseg 采用最近邻算法给转换后的占用网格赋值语义标签, 得到稠密占用网格语义标签
Q&A
- 场景中所有帧都会cut动态物体后转换到参考坐标系时, 会不会存在某些帧动态物体未bbox导致没有cut掉, 导致在最终参考坐标系中合并的静态场景中出现动态目标?
- 可能存在上述情况, 静态场景中出现动态目标, 将该场景变换到当前帧, 再填充保留的动态目标, 会出现同一目标出现在两个位置, 导致标签存在歧义; 所以, 需要bbox标注准确且不能漏标; nuscenes场景中的每一帧点云都有bbox标注, 分割语义标签只有关键帧有;
相关文章:

[论文笔记] SurroundOcc: Multi-Camera 3D Occupancy Prediction for Autonomous Driving
Wei, Yi, et al. “Surroundocc: Multi-camera 3d occupancy prediction for autonomous driving.” Proceedings of the IEEE/CVF International Conference on Computer Vision. 2023. 重点记录 将占用网格应用到多个相机构成的3D空间中; 使用BEVFormer中的方法获取3D特征, …...
-NOA 城市辅助系统-毫末智行)
辅助驾驶功能开发-功能对标篇(16)-NOA 城市辅助系统-毫末智行
1.横向对标参数 厂商毫末智行车型魏牌摩卡DHT-PHEV上市时间发布:2022年8月30日 上市:2022年底前方案12V5R2L+1DMS摄像头前视摄像头*3【800W】侧视摄像头*4后视摄像头*1【800W】环视摄像头*4DMS摄像头*1雷达毫米波雷达*54D毫米波雷达/超声波雷达*12激光雷达*2【速腾聚创 M1,1…...

H3C的IRF堆叠互联关系说明
H3C IRF堆叠互联说明48口交换机连接方式IRF Port 两台设备第一台的51口 第二台的51口irf-port 1/2 port group interface ten-gigabitethernet 1/0/51 port group interface ten-gigabitethernet 1/0/52第一台的52口第二台的52口irf-port 2/1 port group interface ten-gigabi…...
)
货物摆放(蓝桥杯)
货物摆放 题目描述 小蓝有一个超大的仓库,可以摆放很多货物。 现在,小蓝有 n 箱货物要摆放在仓库,每箱货物都是规则的正方体。小蓝规定了长、宽、高三个互相垂直的方向,每箱货物的边都必须严格平行于长、宽、高。 小蓝希望所有的…...

3782: 【C3】【穷举】弹珠游戏
目录 题目描述 输入 输出 样例输入 样例输出 题目描述 游戏的内容是:在一个 n*n 的矩阵里,有若干个敌人,你的弹珠可以摧毁敌人,但只能攻击你所在的行、列里的所有敌人,然后你就可以获得他们的分数之和࿰…...

leetcode 5
leetcode 5 题目是通过枚举字符串,然后判断是否子字符串满足回文。 引用传递和值传递相比,引用传递可以减少内存空间。提高代码运行效率。 https://www.cnblogs.com/yanlingyin/archive/2011/12/07/2278961.html...

centos中nacos设置开机自启动
以下实践亲测有效! 1、在以下目录编辑新建nacos.service文件 vim /lib/systemd/system/nacos.service [Unit] Descriptionnacos Afternetwork.target [Service] Typeforking ExecStart/usr/local/nacos/bin/startup.sh -m standalone ExecReload/usr/local/nacos/b…...
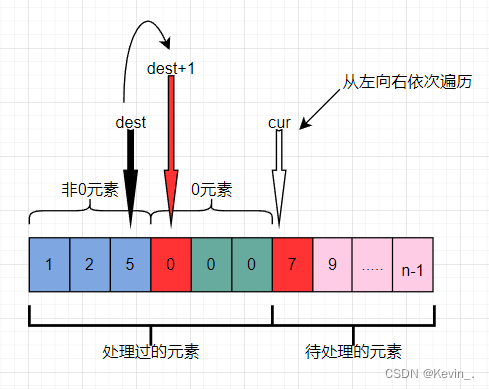
双指针——移动零
一,题目要求: 给定一个数组 nums,编写一个函数将所有 0 移动到数组的末尾,同时保持非零元素的相对顺序。 请注意 ,必须在不复制数组的情况下原地对数组进行操作。 示例 1: 输入: nums [0,1,0,3,12] 输出: [1,3,12,0,0…...
WPF中在MVVM模式下实现导航功能
WPF中在MVVM模式下实现导航功能 一、利用TabControl 使用场景:项目小,不用考虑内存开销的问题。 实现方式1-手动指定ViewModel 分别定义3个UserControl作为View用于演示 <UserControl...><Grid><StackPanel Orientation"Vertic…...

SpringBoot面试题2:SpringBoot与SpringCloud 区别?SpringBoot和Spring、SpringMVC的区别
该文章专注于面试,面试只要回答关键点即可,不需要对框架有非常深入的回答,如果你想应付面试,是足够了,抓住关键点 面试官:SpringBoot与SpringCloud 区别? Spring Boot 和 Spring Cloud 是 Spring 生态系统中的两个关键组件,它们有以下区别: 定位:Spring Boot 用于简…...

Practical Deep Raw Image Denoisingon Mobile Devices
Abstract 近年来,基于深度学习的图像去噪方法得到了广泛的研究,并在许多公共基准数据集中盛行。然而,最先进的网络计算成本太高,无法直接应用于移动设备。在这项工作中,我们提出了一种轻量级、高效的基于神经网络的原…...
)
如何在Android项目中制作和使用三方包(jar文件)
文章目录 1 概念介绍2 制作方法2.1 制作步骤2.2 制作结果3 使用方法3.1 具体步骤3.2 示例代码4 内容总结在项目中为了跨部门协作需要把相关的内容打成包文件,基于这个需求,我们将介绍如何把 代码制作成三方包,这里的三方包是指jar文件。同时也会介绍如何在Android项目中使用…...

消息队列Beanstalkd介绍
摘要: Beanstalkd是一个高性能、轻量级的、分布式的、内存型的消息队列系统。最初设计的目的是想通过后台异步执行耗时的任务来降低高容量Web应用系统的页面访问延迟。其实Beanstalkd是典型的类Memcached设计,协议和使用方式都是同样的风格。其基本设计思…...
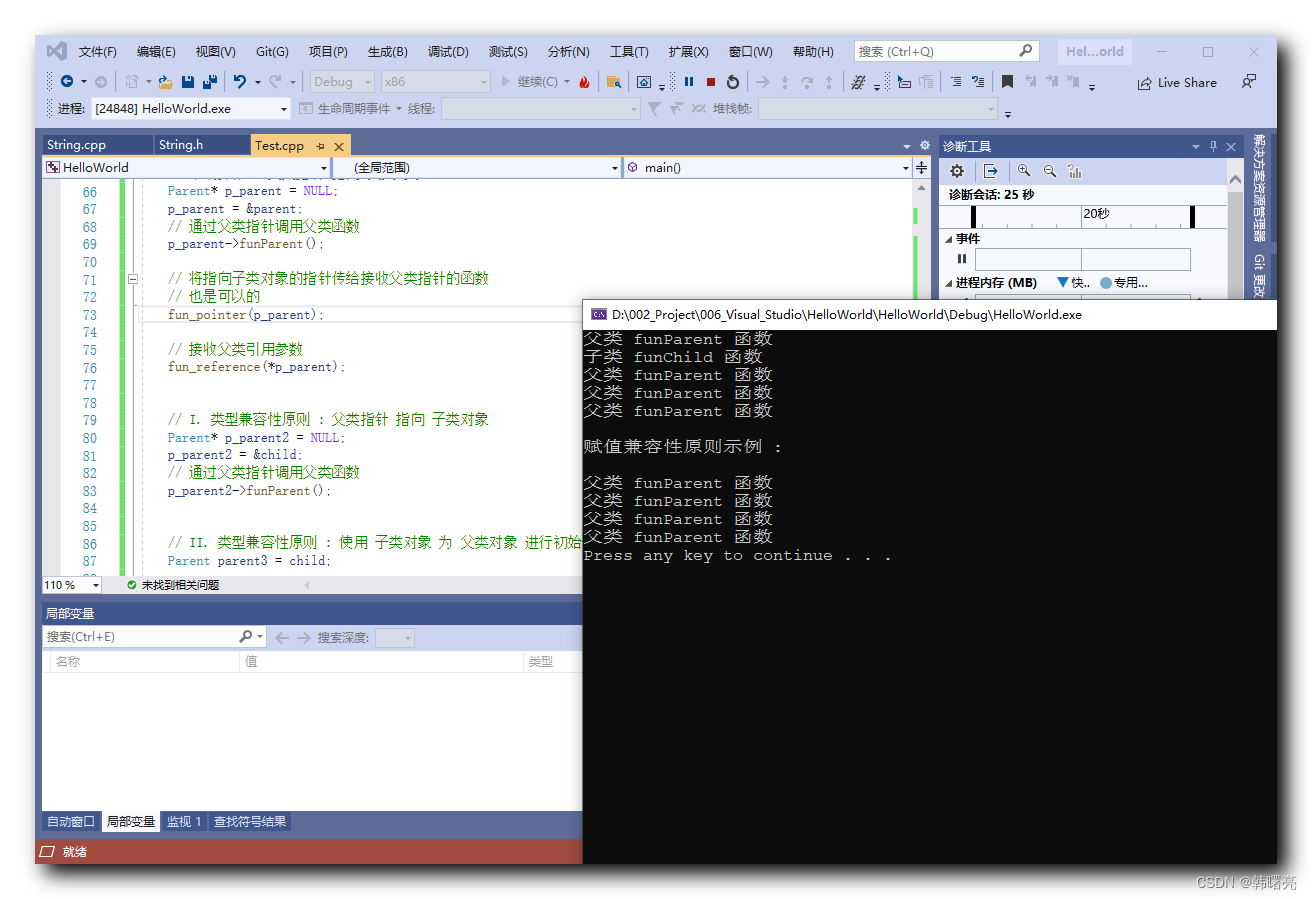
【C++】继承 ⑥ ( 继承中的构造函数和析构函数 | 类型兼容性原则 | 父类指针 指向 子类对象 | 使用 子类对象 为 父类对象 进行初始化 )
文章目录 一、public 公有继承 - 示例分析1、类型兼容性原则2、类型兼容性原则应用场景 二、类型兼容性原则 - 示例分析1、父类指针 指向 子类对象2、使用 子类对象 为 父类对象 进行初始化3、完整代码示例 一、public 公有继承 - 示例分析 1、类型兼容性原则 类型兼容性原则 :…...
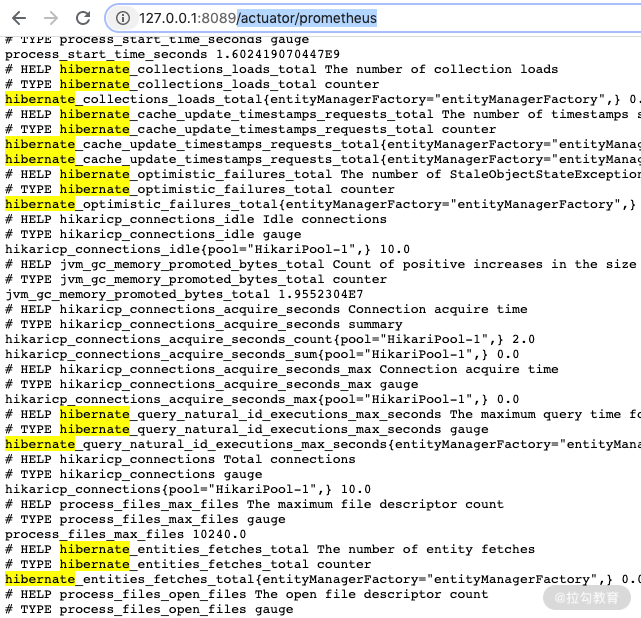
15 | JPA 对 Web MVC 开发者做了哪些支持
我们使用 Spring Data JPA 的时候,一般都会用到 Spring MVC,Spring Data 对 Spring MVC 做了很好的支持,体现在以下几个方面: 支持在 Controller 层直接返回实体,而不使用其显式的调用方法;对 MVC 层支持标…...

链表的概念+MySingleList的实现
文章目录 链表一、 链表的概念1.概念2. 结构 二、MySingleList的实现1 .定义内部类2 .创建链表3. 遍历链表并打印4.查找单链表中是否包含关键字key5.得到链表的长度6.头插法7. 尾插法8.任意位置插入8.删除结点清空 链表 顺序存储:顺序表/ArrayList 优点࿱…...

小黑子—Maven基础
Maven基础 一 小黑子的Maven学习1. Mavn的介绍2. Maven基础概念2.1 仓库2.2 坐标2.3 仓库配置 3. 手动写一个maven项目3.1 Maven项目构建命令3.2 插件创建工程 4. IDEA下的maven项目5. 依赖管理5.1 依赖配置5.2 依赖传递5.3 可选依赖(不透明)5.4 排除依赖…...
【Netty专题】【网络编程】从OSI、TCP/IP网络模型开始到BIO、NIO(Netty前置知识)
目录 前言前置知识一、计算机网络体系结构二、TCP/IP协议族2.1 简介*2.2 TCP/IP网络传输中的数据2.3 地址和端口号2.4 小总结 三、TCP/UDP特性3.1 TCP特性TCP 3次握手TCP 4次挥手TCP头部结构体 3.2 UDP特性 四、总结 课程内容一、网络通信编程基础知识1.1 什么是Socket1.2 长连…...
扬帆起航:许战海方法论日文版正式发布
近日,中国头部战略咨询机构‘许战海咨询’最新研究成果《中国汽车行业新能源转型战略》行业白皮书日文版,即将在日本发布。同时发布的日文版核心方法论白皮书还有《主品牌进化战略》、《第二招牌增长战略》、《链主品牌:制造业的竞争之王》等…...

Docker 安装zookeeper
一、安装单机版 1、拉取镜像 docker pull zookeeper2、创建挂载目录 mkdir -p /mydata/zookeeper/{conf,data,logs}3、新建配置文件 cd /mydata/zookeeper/conf vi zoo.cfgdataDir/data dataLogDir/logs tickTime2000 initLimit10 syncLimit5 clientPort21814、单机主机启…...

P3C代码规范检查:风险驱动架构下的动态治理策略
P3C代码规范检查:风险驱动架构下的动态治理策略 【免费下载链接】p3c Alibaba Java Coding Guidelines pmd implements and IDE plugin 项目地址: https://gitcode.com/gh_mirrors/p3/p3c 在数字化转型浪潮中,企业级Java应用面临代码质量与开发效…...

如何在Windows 11 LTSC中快速安装微软商店:完整免费指南
如何在Windows 11 LTSC中快速安装微软商店:完整免费指南 【免费下载链接】LTSC-Add-MicrosoftStore Add Windows Store to Windows 11 24H2 LTSC 项目地址: https://gitcode.com/gh_mirrors/ltscad/LTSC-Add-MicrosoftStore Windows 11 LTSC版本以其卓越的稳…...

类OpenClaw智能体优选指南,企业级+个人级全覆盖
2026年初,OpenClaw开源智能体框架凭借“自主规划、工具调用、端到端执行”的核心能力,打破传统AI“只对话不行动”的壁垒,在GitHub迅速斩获25万星标,引发全球科技圈热潮,国内厂商纷纷入局推出类OpenClaw产品࿰…...

mT5分类增强版中文-base效果惊艳:同一输入生成‘正式/口语/幽默’三风格文本示例
mT5分类增强版中文-base效果惊艳:同一输入生成‘正式/口语/幽默’三风格文本示例 1. 模型介绍:零样本学习的文本增强利器 mT5分类增强版中文-base是一个基于mT5架构的文本增强模型,专门针对中文场景进行了深度优化。这个模型最大的特点是采…...

揭秘AI教材写作:低查重率,用AI轻松搞定教材编写难题!
编写教材需要丰富的资料作为基础,但传统的资料整理方式早已无法满足当前的需求。过去,课标文件、学术论文和教学案例等信息零散地散落在多个平台上,比如知网和教研网站,这让我们花费数天才筛选到有用的内容。而即使所有资料都收集…...

告别重复造轮子:用快马AI一键生成Unity高效开发工具与通用模块
告别重复造轮子:用快马AI一键生成Unity高效开发工具与通用模块 在Unity游戏开发过程中,UI管理系统是最基础也最常被重复开发的模块之一。每次新项目都要从头搭建UI框架,不仅浪费时间,还容易引入不一致的设计模式。最近我在InsCod…...

终极Illustrator脚本合集:10个免费工具彻底改变你的设计工作流
终极Illustrator脚本合集:10个免费工具彻底改变你的设计工作流 【免费下载链接】illustrator-scripts Adobe Illustrator scripts 项目地址: https://gitcode.com/gh_mirrors/il/illustrator-scripts 你是否曾经在Adobe Illustrator中花费数小时重复执行相同…...

Ubuntu 20.04 下 LVI-SAM 复现全记录:从 gtsam 版本踩坑到 OpenCV 头文件修改
Ubuntu 20.04 下 LVI-SAM 复现实战:从 gtsam 版本适配到 OpenCV 接口升级全解析 在机器人感知与定位领域,LVI-SAM 作为融合激光雷达与视觉信息的 SLAM 系统,因其优异的实时性和鲁棒性备受关注。然而其复杂的依赖环境配置常常让开发者陷入&quo…...

PCL-CE深度指南:从基础配置到高级定制的全流程解析
PCL-CE深度指南:从基础配置到高级定制的全流程解析 PCL-CE作为社区驱动的Minecraft启动器增强版,集成了多版本管理、智能模组兼容和网络优化等核心功能,为玩家提供高效便捷的游戏环境配置工具。无论是新手玩家还是资深爱好者,都能…...

告别视图切换混乱:用快马平台和cc-switch提升前端开发效率
告别视图切换混乱:用快马平台和cc-switch提升前端开发效率 最近在开发一个需要多工作模式切换的项目时,遇到了视图管理混乱的问题。不同模式下的UI组件互相干扰,状态管理变得异常复杂。经过一番摸索,我发现cc-switch这个方案能很…...