二、基于PCL的RANSAC拟合点云中所有直线或平面——3D点云处理系列
RANSAC原理:略。
其他博客大多都是介绍拟合单条直线或平面的代码案例,本文介绍如何拟合多条直线或平面,其实是在单个拟合的基础上接着拟合,以此类推。
注意:步骤中的直线模型是每次随机在点云中取点计算的。
步骤:
1.根据所设参数(点到直线模型的最大距离)把点云分为了内点和外点,对内点进行直线拟合,得到第一次拟合的直线;
2.提取上一步的外点,按照步骤1再次进行内点和外点的划分,对内点拟合直线,得到第二次拟合的直线,并将直线点云叠加到步骤1得到的直线点云中;
3.设置循环终止的条件,重复步骤1-2,最终拟合出点云中所有直线。
多平面拟合的思想如出一辙,概不赘述。
1.RANSAC拟合点云所有直线
//RANSAC拟合多条直线
pcl::PointCloud<pcl::PointXYZ>::Ptr LineFitting(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud) {//内点点云合并pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_lines(new pcl::PointCloud<pcl::PointXYZ>());while (cloud->size() > 20)//循环条件{pcl::SampleConsensusModelLine<pcl::PointXYZ>::Ptr model_line(new pcl::SampleConsensusModelLine<pcl::PointXYZ>(cloud));pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_line);ransac.setDistanceThreshold(0.05); //内点到模型的最大距离ransac.setMaxIterations(100); //最大迭代次数ransac.computeModel(); //直线拟合//根据索引提取内点std::vector<int> inliers;ransac.getInliers(inliers);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_line(new pcl::PointCloud<pcl::PointXYZ>());pcl::copyPointCloud<pcl::PointXYZ>(*cloud, inliers, *cloud_line);//若内点尺寸过小,不用继续拟合,跳出循环if (cloud_line->width * cloud_line->height < 20) {break;}*cloud_lines = *cloud_lines + *cloud_line;//pcl::io::savePCDFile(path1+ strcount +"_"+ str + ".pcd", *cloud_line);//提取外点pcl::PointCloud<pcl::PointXYZ>::Ptr outliers(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointIndices::Ptr inliersPtr(new pcl::PointIndices);inliersPtr->indices = inliers;pcl::ExtractIndices<pcl::PointXYZ> extract;extract.setInputCloud(cloud);extract.setIndices(inliersPtr);extract.setNegative(true); // 设置为true表示提取外点extract.filter(*outliers);//pcl::io::savePCDFile("C:/pclpoint/data/cp1_lineout"+str+".pcd", *outliers);//cout << outliers->size() << endl;cloud->clear();*cloud = *outliers;}return cloud_lines;
}
2.RANSAC拟合点云所有平面
pcl::PointCloud<pcl::PointXYZ>::Ptr planeFitting(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud) {//内点点云合并pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_planes(new pcl::PointCloud<pcl::PointXYZ>());while (cloud->size() > 100)//循环条件{//--------------------------RANSAC拟合平面--------------------------pcl::SampleConsensusModelPlane<pcl::PointXYZ>::Ptr model_plane(new pcl::SampleConsensusModelPlane<pcl::PointXYZ>(cloud));pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_plane);ransac.setDistanceThreshold(0.01); //设置距离阈值,与平面距离小于0.1的点作为内点//ransac.setMaxIterations(100); //最大迭代次数ransac.computeModel(); //执行模型估计//-------------------------根据索引提取内点--------------------------pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane(new pcl::PointCloud<pcl::PointXYZ>);std::vector<int> inplanes; //存储内点索引的容器ransac.getInliers(inplanes); //提取内点索引pcl::copyPointCloud<pcl::PointXYZ>(*cloud, inplanes, *cloud_plane);//若内点尺寸过小,不用继续拟合,跳出循环if (cloud_plane->width * cloud_plane->height < 100) {break;}*cloud_planes = *cloud_planes + *cloud_plane;//提取外点pcl::PointCloud<pcl::PointXYZ>::Ptr outplanes(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointIndices::Ptr inplanePtr(new pcl::PointIndices);inplanePtr->indices = inplanes;pcl::ExtractIndices<pcl::PointXYZ> extract;extract.setInputCloud(cloud);extract.setIndices(inplanePtr);extract.setNegative(true); // 设置为true表示提取外点extract.filter(*outplanes);//pcl::io::savePCDFile("C:/pclpoint/data/cp1_lineout"+str+".pcd", *outliers);//cout << outliers->size() << endl;cloud->clear();*cloud = *outplanes;}//----------------------------输出模型参数---------------------------/* Eigen::VectorXf coefficient;ransac.getModelCoefficients(coefficient);cout << "平面方程为:\n" << coefficient[0] << "x + " << coefficient[1] << "y + " << coefficient[2] << "z + "<< coefficient[3] << " = 0" << endl;*///返回最终的拟合结果点云return cloud_planes;
}
相关文章:

二、基于PCL的RANSAC拟合点云中所有直线或平面——3D点云处理系列
RANSAC原理:略。 其他博客大多都是介绍拟合单条直线或平面的代码案例,本文介绍如何拟合多条直线或平面,其实是在单个拟合的基础上接着拟合,以此类推。 注意:步骤中的直线模型是每次随机在点云中取点计算的。 步骤&…...

Linux实用指令-指定运行级别、帮助指令
一、 指定运行级别 1.运行级别说明: 0:关机 1:单用户[找回丢失密码] 2:多用户状态没有网络服务 3:多用户状态有网络服务 4:系统未使用保留给用户 5:图形界面 6:系统重启 常用运行级别是3和5,要修改默认的运行级别。可改文件/etc/inittab 的id:5:initd…...

【LeetCode】2562. 找出数组的串联值
难度:简单 题目 给你一个下标从 0 开始的整数数组 nums 。 现定义两个数字的 串联 是由这两个数值串联起来形成的新数字。 例如,15 和 49 的串联是 1549 。 nums 的 串联值 最初等于 0 。执行下述操作直到 nums 变为空: 如果 nums 中存…...
)
Hive知识梳理(好文)
Hive是建立在 Hadoop 上的数据仓库基础构架。可以将SQL查询转换为MapReduce的job在Hadoop集群上执行。 元数据 Hive元数据信息存储在Hive MetaStore中,或者mysql中。 分隔符 Hive默认的分格符有三种,分别是(Ctrl/A)、࿰…...

GitHub仓库的README文件无法显示图片问题-非域名污染原因
之前上自己仓库就偶然发现图片不显示现象,当时以为是网络问题就没有留意这事。但是一直不显示就有问题了!于是网上搜了一遭,看见大家遇到此现象的原因普遍归于DNS污染1而我的问题原来是MarkDown格式! 在图片语法前不要加分区语法…...

opencv入门到精通——图片,视频,摄像头的读取与保存
简介 OpenCV是一个流行的开源计算机视觉库,由英特尔公司发起发展。它提供了超过2500个优化算法和许多工具包,可用于灰度、彩色、深度、基于特征和运动跟踪等的图像处理和计算机视觉应用。OpenCV主要使用C语言编写,同时也支持Python、Java、C等…...

Android 13.0 开机动画支持mp4格式视频作为开机动画播放
1.概述 在13.0的系统产品开发中,在系统开机动画这块一般情况下都是播放开机图片,然后绘制多张开机图片形成开机动画模式,而产品需求要求支持开机mp4格式的短视频来作为开机动画播放视频来介绍产品情况,就需要用开机视频来替代开机动画来实现功能 2.开机动画支持mp4格式视频…...
前端自学需要把大量时间放在 HTML、CSS 吗?
前言 html和css其实不需要花费太多的时间,html暂且不说,css各类的属性太多了,平时如果只是简单做一些小网站根本不需要全部掌握,只需要掌握一些基础常用的即可,一般遇到不会的也可以直接查文档,就我个人来…...
Python爬虫如何设置代理服务器(搭建代理服务器教程)
在Python爬虫中使用代理服务器可以提高爬取数据的效率和稳定性。本文将为您提供搭建代理服务器的详细教程,并提供示例代码,帮助您在Python爬虫中设置代理服务器,实现更高效、稳定的数据抓取。 Python爬虫怎么设置代理服务器(搭建代…...
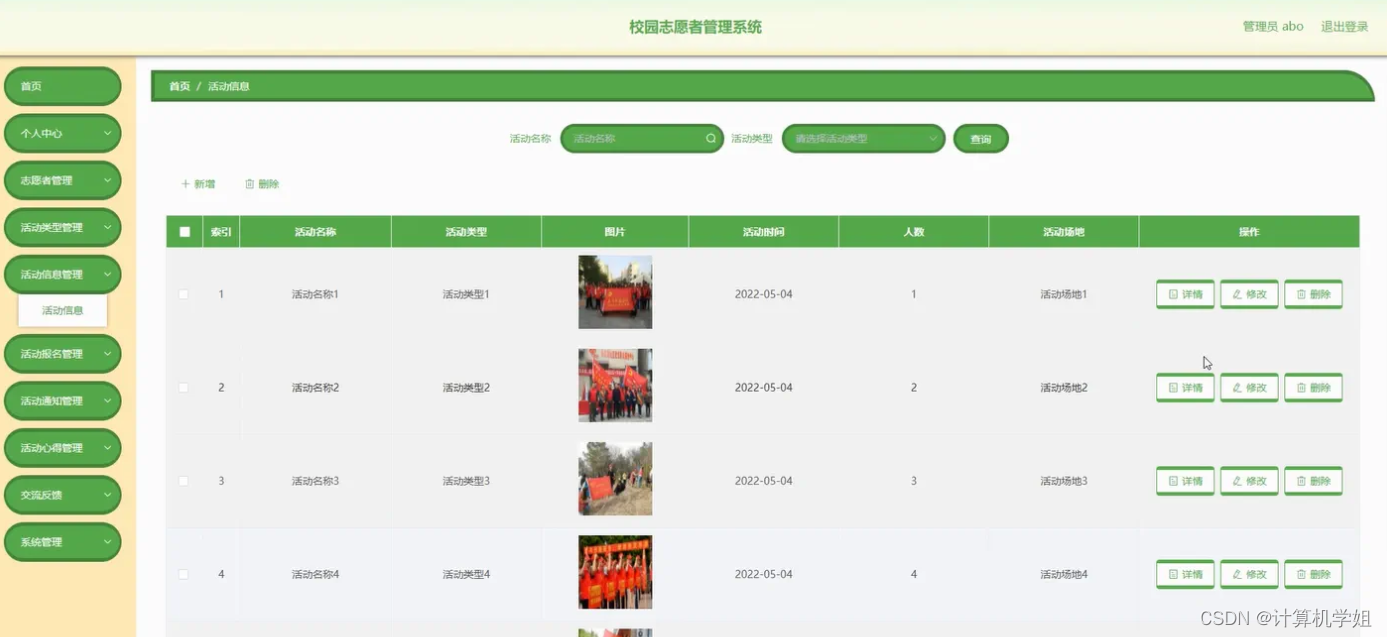
基于SpringBoot的校园志愿者管理系统
基于SpringBoot的校园志愿者管理系统的设计与实现~ 开发语言:Java数据库:MySQL技术:SpringBootMyBatisVue工具:IDEA/Ecilpse、Navicat、Maven 系统展示 主页 活动信息 登录界面 志愿者界面 管理员界面 摘要 校园志愿者管理系统…...
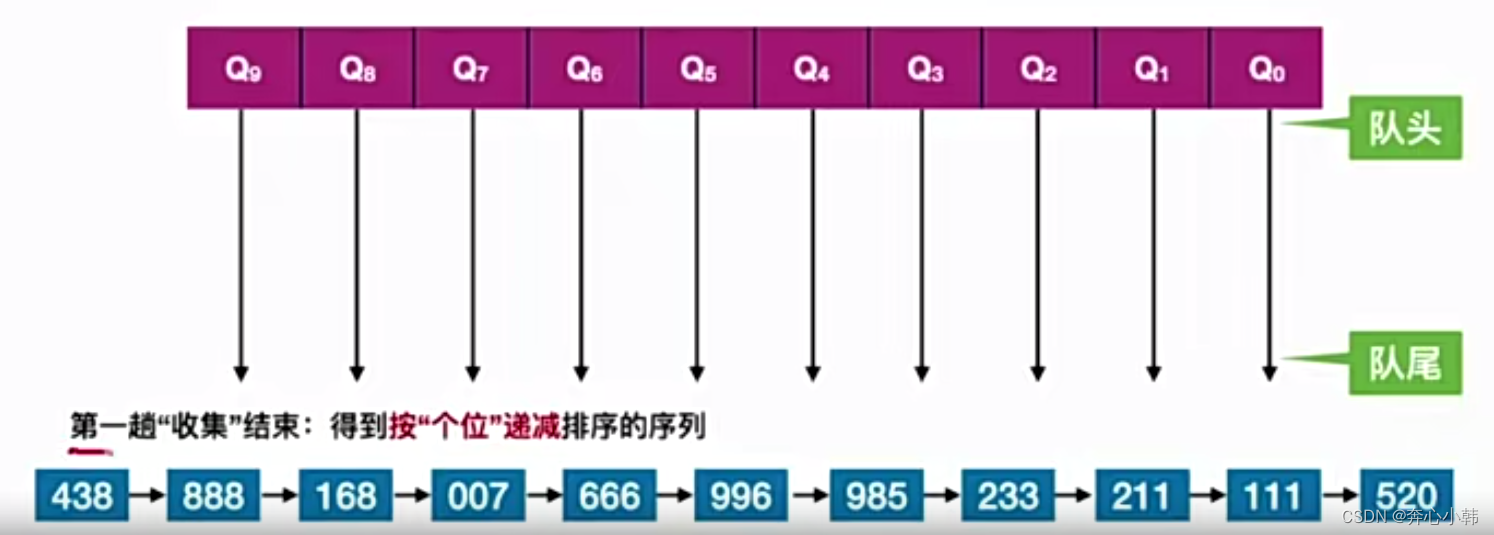
24-数据结构-内部排序-基数排序
基数排序 基数排序,给关键字分成d位(组),,对每一位的情况,可能会出现的值位r(基数)个,然后分成r个队列,对每个对林进行分配耗时O(n),最后按照改位…...

oracle11g安装图解
软件需求 1.安装CentOS6.5的服务器一台 2.Oracle 11g 安装介质: linux.x64_11gR2_database_1of2.zip linux.x64_11gR2_database_2of2.zip 3.命令行客户端工具xshell、crt或者putty 4.图形界面客户端工具Xming 系统配置检查 1.内存检查 grep MemTotal /proc/m…...

CBitmap、CreateCompatibleBitmap、CreateBitmap
一、CBitmap类主要是加载位图资源,或者建立一个空白位图用于存储画面。 BOOL LoadBitmap(UINT nIDResource)从工程资源中加载一张位图BOOL LoadOEMBitmap(UINT nIDBitmap)从系统资源中加载一张位图BOOL CreateBitmap(int nWidth, int nHeigjt, UINT nPlane, UINT n…...

亲测好用教师小程序
作为一名老师,经常需要面对的一大挑战就是如何有效地向学生和家长传达重要的学业信息。而其中,成绩的发布与查询更是重中之重。传统的做法是手动录入数据,或者通过电子邮件发送Excel表格,这样做既繁琐又耗时。幸运的是,…...

第十五章:输入输出流I/O
15.1:输入/输出流 文件类:File 字节流:InputStream:入 OutputStream:出 字符流:Reader:入 Writer:出 15.1.1 输入流 InputStream类是字节输入流的抽象类,所有字节流…...

docker命令实例(举例子学习)
docker命令实例 实例1 docker build -t linksoul/chinese-llama2-chat .实例2 docker run --gpus all --ipchost --ulimit memlock-1 --ulimit stack67108864 --rm -it -v pwd/LinkSoul:/app/LinkSoul -p 7860:7860 linksoul/chinese-llama2-chat实例3 docker run -it -p 78…...

excel常用函数
vlookup函数 ISNA函数 ISNA(value) ISNA 函数用于检查指定的值是否为 #N/A 错误值,并返回 TRUE 或 FALSE。 IF 函数 IF(条件, 如果条件为TRUE的值, 如果条件为FALSE的值)...
使用Portainer图形化工具轻松管理远程Docker环境并实现远程访问
文章目录 前言1. 部署Portainer2. 本地访问Portainer3. Linux 安装cpolar4. 配置Portainer 公网访问地址5. 公网远程访问Portainer6. 固定Portainer公网地址 前言 Portainer 是一个轻量级的容器管理工具,可以通过 Web 界面对 Docker 容器进行管理和监控。它提供了可…...
Git快速安装【附安装包资源】
软件安装包 项目版本管理软件 Git windows版本安装包 安装步骤 双击按照包之后,直接next 安装位置尽量不要选择C盘,如果只有C盘,可以尝试分盘,如果C盘已经很小了,那就没办法了 选择完安装位置之后,直…...

算法进修Day-33
算法进修Day-33 65. 有效数字 难度:困难 题目要求 有效数字(按顺序)可以分成以下几个部分: 一个 小数 或者 整数(可选)一个 e 或 E ,后面跟着一个 整数 小数(按顺序)…...

基于图像梯度的瞳孔中心定位:eyeLike开源项目的技术实现解析
基于图像梯度的瞳孔中心定位:eyeLike开源项目的技术实现解析 【免费下载链接】eyeLike A webcam based pupil tracking implementation. 项目地址: https://gitcode.com/gh_mirrors/ey/eyeLike 在计算机视觉领域,如何仅使用普通网络摄像头实现精准…...

从AHB到AXI:手把手教你理解ARM总线协议的演进与实战选型
从AHB到AXI:ARM总线协议深度解析与工程实践指南 在嵌入式系统与SoC设计领域,总线协议的选择直接影响着系统性能与能效表现。随着处理器性能的快速提升,传统AHB总线逐渐暴露出带宽瓶颈与效率限制,而AXI协议凭借其先进的架构设计成…...

计科毕业设计简单的题目怎么选
0 选题推荐 - 云计算篇 毕业设计是大家学习生涯的最重要的里程碑,它不仅是对四年所学知识的综合运用,更是展示个人技术能力和创新思维的重要过程。选择一个合适的毕业设计题目至关重要,它应该既能体现你的专业能力,又能满足实际应…...

CompressO:免费高效的终极视频图像压缩解决方案
CompressO:免费高效的终极视频图像压缩解决方案 【免费下载链接】compressO Convert any video/image into a tiny size. 100% free & open-source. Available for Mac, Windows & Linux. 项目地址: https://gitcode.com/gh_mirrors/co/compressO 你…...

Dev Container启动慢、调试卡顿、扩展失效,深度诊断与7步精准修复全流程
更多请点击: https://intelliparadigm.com 第一章:Dev Container性能问题的典型现象与影响面分析 Dev Container 在现代云原生开发中广泛用于环境一致性保障,但其性能瓶颈常被低估。当容器启动缓慢、代码补全延迟显著、或调试会话频繁中断时…...

猫抓浏览器扩展完全指南:一站式网页媒体资源嗅探与下载解决方案
猫抓浏览器扩展完全指南:一站式网页媒体资源嗅探与下载解决方案 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 在当今数字内容时代&am…...

芯片面积快被SRAM占了一半?资深工程师教你从DFT/BIST到形状规划的五大实战遴选心法
芯片SRAM面积优化实战:从架构设计到物理实现的五大决策法则 当一颗7nm芯片中SRAM占比突破40%时,工程师面对的早已不是简单的存储单元选择问题,而是一场关于PPA(性能、功耗、面积)的精密博弈。某次流片后分析显示&#…...

微前端架构的几种实现方案
微前端架构的几种实现方案 随着前端应用复杂度的提升,微前端架构逐渐成为解决大型项目模块化与团队协作问题的热门方案。它通过将单体应用拆分为多个独立子应用,实现技术栈无关、独立开发和部署,从而提升开发效率和可维护性。本文将介绍微前…...

告别受限:用ViWizard Apple Music Converter,真正拥有你喜欢的音乐
在数字音乐时代,Apple Music 凭借海量曲库和高品质音质,成为了无数人的首选。但你有没有遇到过这样的困扰:明明付了会员费,下载好的歌曲一旦停止续费,就全部变成灰色无法播放;或者想在朋友的智能音箱、旧款…...

3步掌握Charticulator:从数据到专业图表的免费完整指南
3步掌握Charticulator:从数据到专业图表的免费完整指南 【免费下载链接】charticulator Interactive Layout-Aware Construction of Bespoke Charts 项目地址: https://gitcode.com/gh_mirrors/ch/charticulator 数据可视化不再是程序员的专利,现…...