[ROS2系列] ORBBEC(奥比中光)AstraPro相机在ROS2进行rtabmap 3D建图
目录
背景:
一、驱动AstraPro摄像头
二、安装rtabmap
error1:缺包
三、尝试
四、参数讲解
五、运行
error2: Did not receive data since 5 seconds!
六、效果编辑
error4:
背景:
1、设备:pc;jeston agx orin
2、环境:Ubuntu20.04;ROS2(Foxy)
3、主从机配置,jeston agx orin为主机
4、jeston agx orin含有:AstraPro、激光雷达驱动,刑天底盘控制,语音交互
5、目前已实现激光雷达2D建图,AstraPro驱动,刑天底盘控制,语音交互
一、驱动AstraPro摄像头
https://github.com/orbbec/ros_astra_camera
启动摄像头:
ros2 launch astra_camera astra_pro.launch.pywarning:
[component_container-1] [WARN] [1697708402.794392173] [camera.point_cloud_xyz]: [image_transport] Topics '/camera/depth/image_raw' and '/camera/depth/camera_info' do not appear to be synchronized. In the last 10s:
[component_container-1] Image messages received: 5
[component_container-1] CameraInfo messages received: 5
[component_container-1] Synchronized pairs: 0二、安装rtabmap
https://github.com/introlab/rtabmap_ros
具体操作看[ROS2系列] ubuntu 20.04测试rtabmap-CSDN博客
但是我在jeston agx orin 使用
rosdep update && rosdep install --from-paths src --ignore-src -r -yerror1:缺包
sudo apt-get ros-foxy-
注意:后面跟的包的“_”都需要改成“-”三、尝试
由于我用的是奥比中光摄像头,官方也并没有例子,在issue中我也问了维护者:
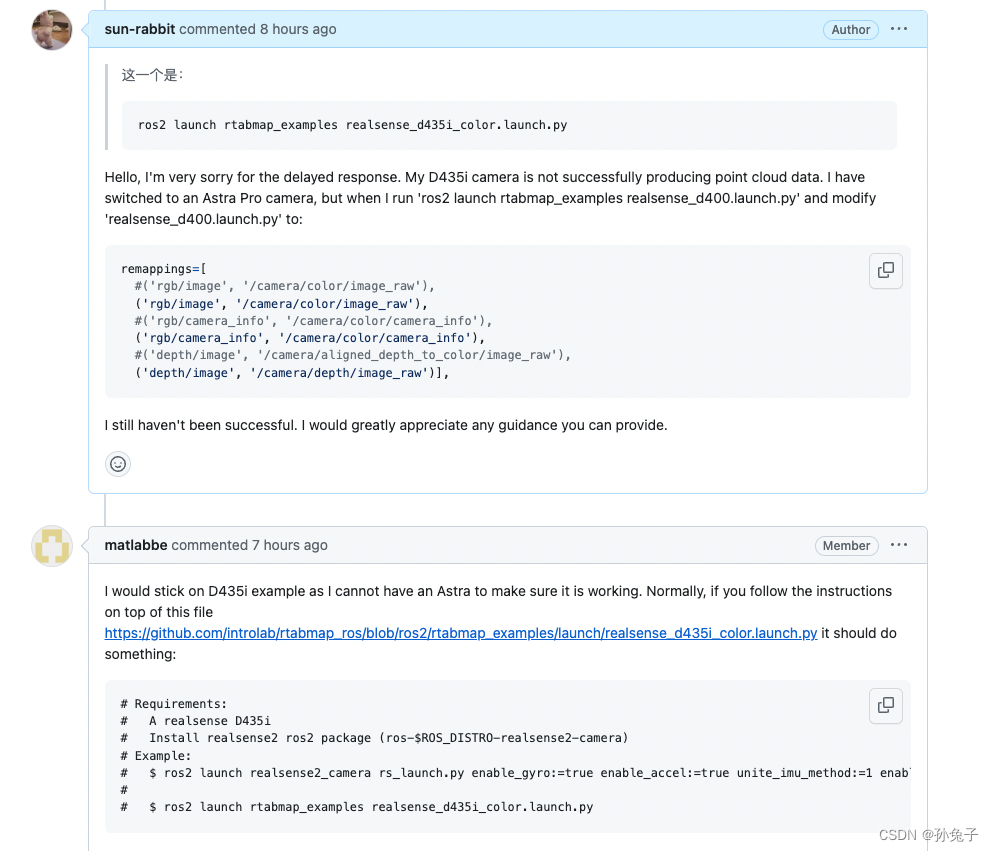
这有一个zed的例子:
ros2 launch zed_wrapper zed.launch.pyros2 launch rtabmap_launch rtabmap.launch.py \rtabmap_args:="--delete_db_on_start" \rgb_topic:=/zed/zed_node/rgb/image_rect_color \depth_topic:=/zed/zed_node/depth/depth_registered \camera_info_topic:=/zed/zed_node/rgb/camera_info \frame_id:=base_link \approx_sync:=false \wait_imu_to_init:=true \imu_topic:=/zed/zed_node/imu/data \qos:=1 \rviz:=trueqos (Quality of Service) argument should match the published topics QoS (1=RELIABLE, 2=BEST EFFORT). ROS1 was always RELIABLE.
所以这里我选择用qos=2。
四、参数讲解
args:="-d --Mem/UseOdomGravity true --Optimizer/GravitySigma 0.3": 这个参数用于指定RTAB-Map的命令行参数。具体地,它包括了以下命令行参数:-d:表示RTAB-Map在启动时删除(清空)先前的数据库,以重新开始构建地图。
--Mem/UseOdomGravity true:启用RTAB-Map使用里程计信息进行重力校正。
--Optimizer/GravitySigma 0.3:设置RTAB-Map优化中的重力方向方差为0.3。
odom_topic:=/t265/odom/sample: 这个选项指定里程计信息的话题,通常用于融合定位和地图构建。frame_id:=t265_link: 这个选项指定RTAB-Map使用的坐标系,通常是相机或机器人的坐标系。在这里,它被设置为t265_link。rgbd_sync:=true: 这个选项表示启用RGB-D数据的同步,确保RGB图像和深度图像具有相同的时间戳。depth_topic:=/d400/aligned_depth_to_color/image_raw: 这个选项指定深度图像的话题。rgb_topic:=/d400/color/image_raw: 这个选项指定RGB图像的话题。camera_info_topic:=/d400/color/camera_info: 这个选项指定相机信息的话题,包含了相机的参数和标定信息。approx_rgbd_sync:=false: 这个选项表示禁用RGB-D数据的近似同步。visual_odometry:=false: 这个选项表示禁用视觉里程计(Visual Odometry)。queue_size:=30: 这个选项指定RTAB-Map节点使用的消息队列大小。增加队列大小可以容纳更多的消息,以应对消息发布频率不一致的情况。
frame_id:=base_link: 这个选项指定RTAB-Map节点使用的坐标系,通常是相机或机器人的坐标系。在这里,它被设置为base_link。approx_sync:=false: 这个选项用于控制RGB和深度图像的同步。当设置为false时,RGB和深度图像不会强制同步。
五、运行
进入ubuntu,查看摄像头话题
ros2 topic list ('rgb/image', '/camera/color/image_raw'),#('rgb/camera_info', '/camera/color/camera_info'),('rgb/camera_info', '/camera/color/camera_info'),#('depth/image', '/camera/aligned_depth_to_color/image_raw'),('depth/image', '/camera/depth/image_raw')]
当我尝试命令时候,会出现延时错误

error2: Did not receive data since 5 seconds!
rtabmap_viz-3] [WARN] [1697700727.832576678] [rtabmap.rtabmap_viz]: rtabmap_viz: Did not receive data since 5 seconds! Make sure the input topics are published ("$ ros2 topic hz my_topic") and the timestamps in their header are set. If topics are coming from different computers, make sure the clocks of the computers are synchronized ("ntpdate"). If topics are not published at the same rate, you could increase "queue_size" parameter (current=20). 这个错误有很多,github issue里面相关的解决方法我都看完了,但不是我需要的,最后我的可执行命令是:
ros2 launch rtabmap_launch rtabmap.launch.py \rtabmap_args:="--delete_db_on_start" \rgb_topic:=/camera/color/image_raw \depth_topic:=/camera/depth/image_raw \camera_info_topic:=/camera/color/camera_info \frame_id:=camera_link \use_sim_time:=true \approx_sync:=true \qos:=2 \rviz:=true \queue_size:=30六、效果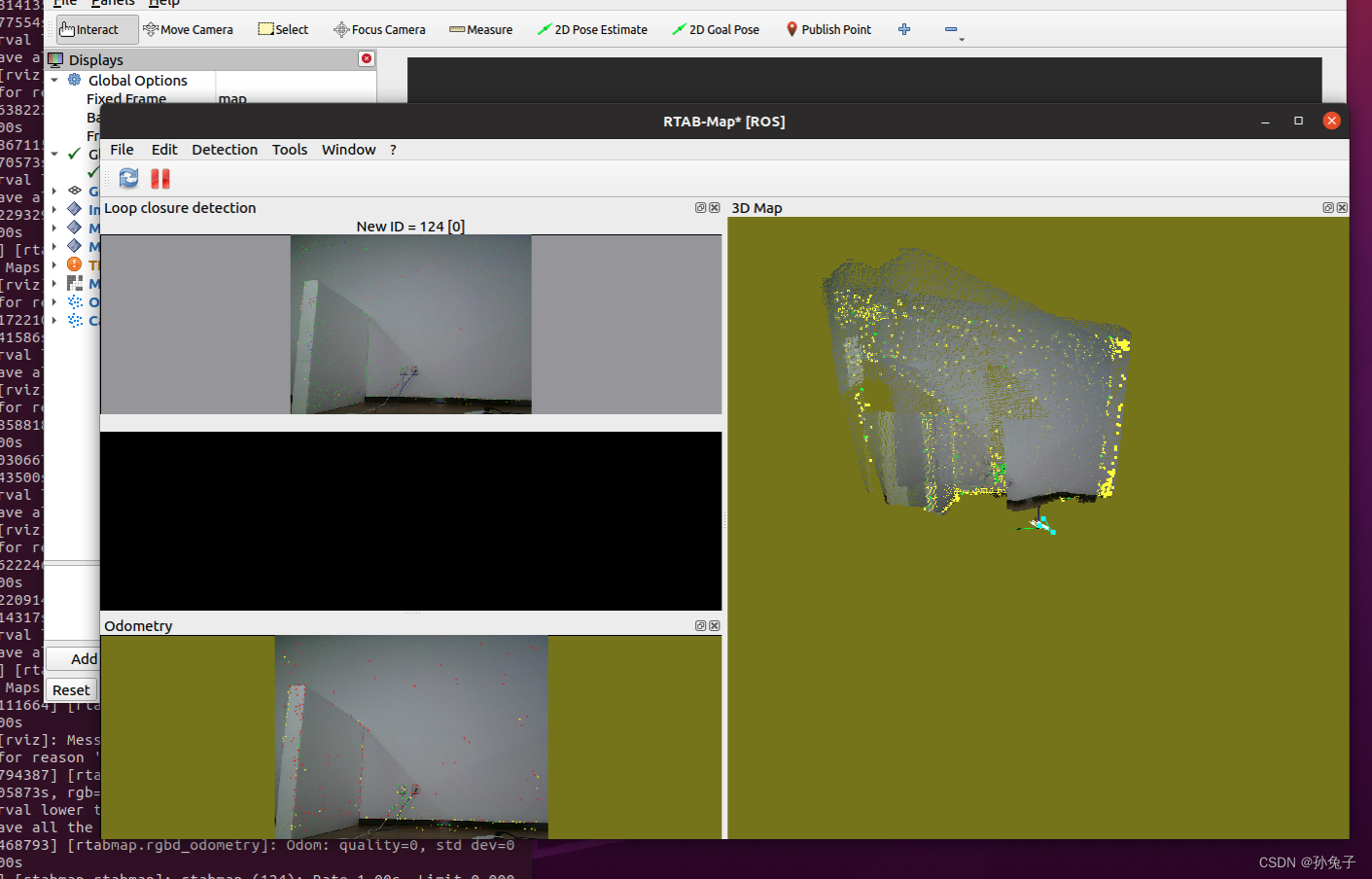
至少3个界面都有图像了。
当我操作我的机器人时,图像同步的过于慢,终端有报错
error4:
[rtabmap_viz-3] [INFO] [1697708400.611813528] [rtabmap.rtabmap_viz]: rtabmap_viz stopping spinner...
[rtabmap-2] [ERROR] (2023-10-19 17:39:10.449) Rtabmap.cpp:1343::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 0 is ignored!
[rtabmap-2] [ERROR] (2023-10-19 17:39:11.367) Rtabmap.cpp:1343::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 0 is ignored!后续再更吧,尊的累了,搞的想吐。我的intel D435i 为什么不显示点云!!!
相关文章:
[ROS2系列] ORBBEC(奥比中光)AstraPro相机在ROS2进行rtabmap 3D建图
目录 背景: 一、驱动AstraPro摄像头 二、安装rtabmap error1:缺包 三、尝试 四、参数讲解 五、运行 error2: Did not receive data since 5 seconds! 六、效果编辑 error4: 背景: 1、设备:pc;jeston agx …...

墨迹天气商业版UTF-8模板,Discuz3.4灰白色风格(带教程)
1.版本支持:Discuzx3.4版本,Discuzx3.3版本,DiscuzX3.2版本。包括网站首页,论坛首页,论坛列表页,论坛内容页,论坛瀑布流,资讯列表页(支持多个),产品列表页(支持多个),关于…...
Godot 官方2D C#重构(2):弹幕躲避
前言 Godot 官方 教程 Godot 2d 官方案例C#重构 专栏 Godot 2d 重构 github地址 实现效果 技术点说明 异步函数 Godot的事件不能在Task中运行,因为会导致跨线程的问题。 //这样是不行的,因为跨线程了,而且会阻塞UI线程,具体原因…...

ELK之LogStash插件grok和geoip的配置使用
本文针对LogStash常用插件grok和geoip的使用进行说明: 一、使用grok输出结构化数据 编辑 first-pipeline.conf 文件,修改为如下内容: input{#stdin{type > stdin}file {# 读取文件的路径path > ["/tmp/access.log"]start_…...
基于Python实现的一款轻量、强大、好用的视频处理软件,可缩视频、转码视频、倒放视频、合并片段、根据字幕裁切片段、自动配字幕等
Quick Cut 是一款轻量、强大、好用的视频处理软件。它是一个轻量的工具,而不是像 Davinci Resolve、Adobe Premiere 那样专业的、复杂的庞然大物。Quick Cut 可以满足普通人一般的视频处理需求:压缩视频、转码视频、倒放视频、合并片段、根据字幕裁切片段…...

深入探讨 Golang 中的追加操作
通过实际示例探索 Golang 中的追加操作 简介 在 Golang 编程领域,append 操作是一种多才多艺的工具,使开发人员能够动态扩展切片、数组、文件和字符串。在这篇正式的博客文章中,我们将踏上一段旅程,深入探讨在 Golang 中进行追加…...
三网话费余额查询的API系统 基于thinkphp6.0框架
本套系统是用thinkphp6.0框架开发的,PHP需大于8.2,系统支持用户中心在线查询和通过API接口对接发起查询,用户余额充值是对接usdt接口,源码全开源,支持懂技术的人二次开发~搭建教程1、源码上传后,吧运行目录…...

LeetCode —— dfs和bfs
797. 所有可能的路径 给你一个有 n 个节点的 有向无环图(DAG),请你找出所有从节点 0 到节点 n-1 的路径并输出(不要求按特定顺序)。 graph[i] 是一个从节点 i 可以访问的所有节点的列表(即从节点 i 到节点…...

【ROS 2 基础-常用工具】-7 Rviz仿真机器人
所有内容请查看:博客学习目录_Howe_xixi的博客-CSDN博客...
循环神经网络(RNN)
定义 循环神经网络(RNN)是一种深度学习神经网络,专门用于处理序列数据,如文本、语音和时间序列数据。RNN的独特之处在于它具有循环连接,允许信息在网络内持续流动,以便处理先前的输入信息,具体…...
ESP32C3 LuatOS TM1650②动态显示累加整数
--注意:因使用了sys.wait()所有api需要在协程中使用 -- 用法实例 PROJECT "ESP32C3_TM1650" VERSION "1.0.0" _G.sys require("sys") local tm1650 require "tm1650"-- 拆分整数,并把最低位数存放在数组最大索引处 loc…...
文心一言 VS 讯飞星火 VS chatgpt (117)-- 算法导论10.3 2题
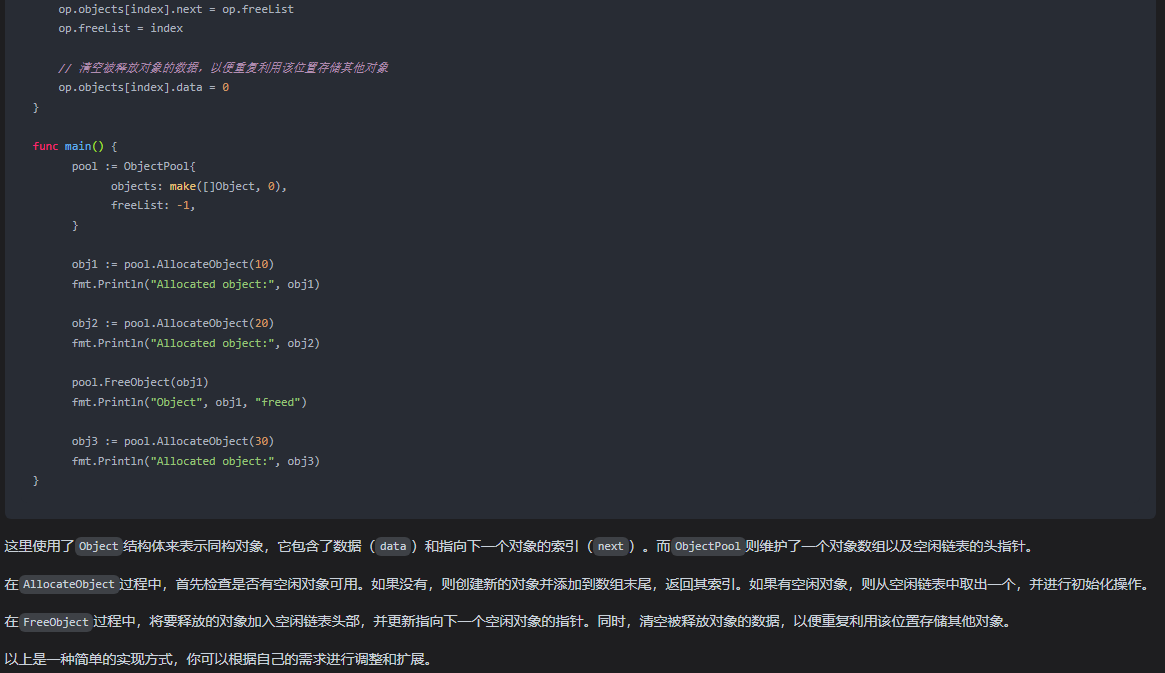
二、用go语言,对一组同构对象用单数组表示法实现,写出过程ALLOCATE-OBJECT和FREE-OBJECT。 文心一言: 在Go语言中,我们通常使用指针和结构体来表示和操作复杂的数据结构。对于一组同构对象,我们可以使用一个数组来存…...

专业修图软件 Affinity Photo 2 mac中文版编辑功能
Affinity Photo for Mac是应用在MacOS上的专业修图软件,支持多种文件格式,包括psD、PDF、SVG、Eps、TIFF、JPEG等。 Affinity Photo mac提供了许多高级图像编辑功能,如无限制的图层、非破坏性操作、高级的选择工具、高级的调整层、HDR合成、全…...
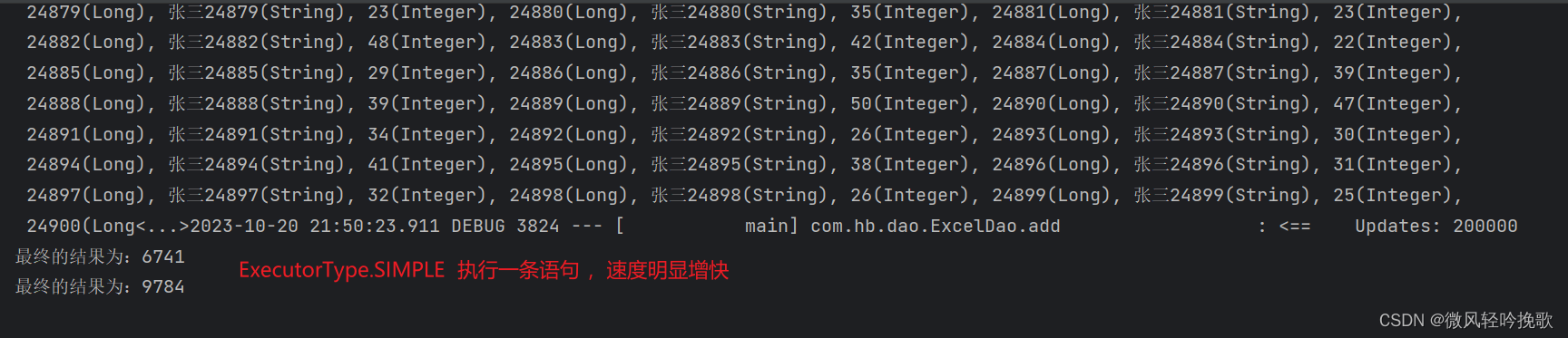
Excel 5s内导入20w条简单数据(不使用多线程)
文章目录 Excel 5s内导入20w条数据1. 生成20w条数据1.1 使用Excel 宏生成20w条数据1.2 生成成功 2. ExecutorType:批量操作执行器类型2.1 ExecutorType.SIMPLE2.2 ExecutorType.BATCH2.3 ExecutorType.REUSE 3. 20w条数据直接插入数据库3.1 使用ExecutorType.SIMPLE…...
计算机毕业设计 基于SpringBoot笔记记录分享网站的设计与实现 Javaweb项目 Java实战项目 前后端分离 文档报告 代码讲解 安装调试
🍊作者:计算机编程-吉哥 🍊简介:专业从事JavaWeb程序开发,微信小程序开发,定制化项目、 源码、代码讲解、文档撰写、ppt制作。做自己喜欢的事,生活就是快乐的。 🍊心愿:点…...

Windows Ubuntu子系统使用USB教程
Windows Ubuntu子系统使用USB教程 Windows Subsystem for Linux (WSL)允许您在Windows上运行Linux。以下指南涉及如何在WSL2中连接和使用USB设备。 WSL版本 在WSL内部运行 uname -a应该显示内核版本为5.10.60.1或更高版本。你需要运行WSL 2发行版本。 USB/IP 客户端工具 在W…...

如何理解TCP/IP协议?
一、是什么 TCP/IP,传输控制协议/网际协议,是指能够在多个不同网络间实现信息传输的协议簇 TCP(传输控制协议) 一种面向连接的、可靠的、基于字节流的传输层通信协议 IP(网际协议) 用于封包交换数据网…...

如何开发出来一款解决抖音本地生活的软件营销工具?
一、智能剪辑、矩阵分发、无人直播、爆款文案于一体独立应用开发 抖去推----主要针对本地生活的----移动端(小程序软件系统,目前是全国源头独立开发),开发功能大拆解分享,功能大拆解: 7大模型剪辑法(数学阶乘&#x…...

GO 语言如何用好变长参数?
函数重载 对于函数重载相信编码过的 xdm 肯定不会陌生,函数重载就是在同一个作用域内定义多个具有相同名称但参数列表不同的函数 此处的参数列表不同,可以是参数的类型不同,参数的个数不同 那么我们一起分别来看看 C 语言,C 语…...

怎么解决 Http 协议无状态?
一、Http 协议无状态的含义 1.1 有状态协议 常见的许多七层协议实际上是有状态的,例如 SMTP 协议,它的第一条消息必须是 HELO,用来握手,在 HELO 发送之前其他任何命令都是不能发送的;接下来一般要进行 AUTH 阶段&#…...

ARM Cortex-R5F系统控制寄存器详解与配置实践
1. ARM Cortex-R5F系统控制寄存器概述在嵌入式系统开发中,系统控制寄存器是处理器最核心的配置接口。作为ARM Cortex-R5F的开发者,我经常需要与这些寄存器打交道。CP15协处理器提供了完整的系统控制功能集,通过MRC/MCR指令在特权模式下访问。…...

Claude劝退实录:Token混乱、质量下滑与糟糕客服
作为一名长期关注并使用生成式AI的开发者,我曾一度是Claude的坚定支持者。然而,最近的一系列遭遇让我不得不重新审视这份信任。今天,我想通过这篇文章,详细复盘我从“路转粉”再到“粉转黑”的完整心路历程,聊聊那些关…...

OpenClaw与Git联动:自动提交代码、拉取分支,提升开发协同效率
OpenClaw与Git联动:自动提交代码、拉取分支,提升开发协同效率引言在现代软件开发中,高效的代码管理和团队协作是项目成功的核心要素。Git作为分布式版本控制系统的标准工具,提供了强大的分支管理和代码追踪能力。然而,…...

Go语言的并发模式详解
Go语言的并发模式详解 并发的重要性 在现代软件开发中,并发是一个重要的概念,它可以充分利用多核处理器的性能,提高程序的执行效率。Go语言提供了强大的并发支持,通过goroutine和channel等特性,使得并发编程变得简单而…...

AWPortrait-Z完整攻略:科哥WebUI从安装到精通全流程解析
AWPortrait-Z完整攻略:科哥WebUI从安装到精通全流程解析 1. 快速启动与界面初探 如果你对AI生成人像充满好奇,但又被复杂的命令行和参数吓退,那么AWPortrait-Z的WebUI界面就是为你准备的。这个由科哥基于Z-Image精心构建并二次开发的人像美…...

轻量级API网关Lunaroute:嵌入式设计与微服务流量治理实践
1. 项目概述:一个轻量级、高性能的API网关最近在梳理团队内部微服务架构的治理方案时,我又重新审视了API网关这个核心组件。市面上成熟的网关产品很多,像Kong、Tyk、APISIX等,功能强大,生态完善,但对于一些…...

终极指南:让本地视频拥有B站弹幕效果,离线观影也能嗨起来!
终极指南:让本地视频拥有B站弹幕效果,离线观影也能嗨起来! 【免费下载链接】BiliLocal add danmaku to local videos 项目地址: https://gitcode.com/gh_mirrors/bi/BiliLocal 还在羡慕B站视频的弹幕互动氛围吗?想让你硬盘…...

如何提交网站到谷歌网站收录?老域名重新启用后的二次快速索引技巧
2012年注册的域名停用3年后重新绑定服务器IP。网页数量从原本的5000页突降至50页。谷歌蜘蛛带着旧地图访问新网站。服务器日志显示单日产生3800次404状态码。网页抓取配额在48小时内从每日2000次跌至每日15次。老域名自带的250条历史外部链接指向已经消失的旧目录。新上线的10个…...

AI Agent实战指南:从框架选型到RAG应用构建
1. 从Awesome列表到实战指南:如何高效利用AI Agent开源生态如果你最近在琢磨怎么用大语言模型(LLM)搞点自动化的事情,比如让AI帮你写代码、分析数据,或者管理知识库,那你大概率会搜到各种眼花缭乱的“AI Ag…...

LSGAN原理与Keras实现:提升生成对抗网络训练稳定性
1. LSGAN基础概念与核心优势 在传统GAN训练中,判别器使用sigmoid交叉熵损失函数,这容易导致梯度消失问题。LSGAN(最小二乘生成对抗网络)通过将判别器的损失函数替换为最小二乘损失,有效改善了这一问题。我第一次尝试LS…...