LK光流法和LK金字塔光流法(含python和c++代码示例)
0 引言
本文主要记录LK光流算法及LK金字塔光流算法的详细原理,最后还调用OpenCV中的cv2.calcOpticalFlowPyrLK()函数实现LK金字塔光流算法,其中第3部分是python语言实现版本,第4部分是c++语言实现版本。
1 LK光流算法
1.1 简述
LK光流法是一种计算图像序列中物体运动的光流(optical flow)的经典算法。它是由Bruce D. Lucas和Takeo Kanade在1981年提出的,被广泛应用于计算机视觉和图像处理领域。
光流是指图像中物体在时间上的运动造成的像素强度变化。光流法的目标是通过分析图像序列中相邻帧之间的像素强度变化来估计物体的运动状况。LK光流法基于以下三个基本假设:
- 亮度恒定假设:假设相邻帧中的像素在时间上的变化主要由物体的运动引起,而不是由光照变化或物体的颜色变化引起。这意味着在物体的运动下,相邻帧中对应的像素强度值应该保持不变;
- 小运动假设:假设物体在相邻帧之间的运动是较小的,即相邻帧之间的像素位移较小。这个假设使得可以使用局部近似的方法来估计光流;
- 空间一致性:场景中相同表面的相邻点具有相似的运动,并且其投影到图像平面上的距离也比较近。(
LK算法特有)
1.2 原理推导
首先基于亮度恒定假设和小运动假设,设 t t t时刻,位于 ( x , y ) (x,y) (x,y)像素位置的物体,且在 t + Δ t t+\Delta _t t+Δt时刻位于 ( x + u , y + v ) (x+u,y+v) (x+u,y+v)位置,则有:
I ( x , y , t ) = I ( x + u , y + v , t + Δ t ) (1) I(x,y,t)=I(x+u,y+v,t+\Delta _t) \tag{1} I(x,y,t)=I(x+u,y+v,t+Δt)(1)
将等式右边进行一阶泰勒展开得:
I ( x + u , y + v , t + Δ t ) = I ( x , y , t ) + I x ′ u + I y ′ v + I t ′ Δ t (2) I(x+u,y+v,t+\Delta _t)=I(x,y,t)+I{}'_xu+I{}'_yv+I{}'_t\Delta _t \tag{2} I(x+u,y+v,t+Δt)=I(x,y,t)+Ix′u+Iy′v+It′Δt(2)
结合公式1和公式2,得出:
I ( x , y , t ) = I ( x , y , t ) + I x ′ u + I y ′ v + I t ′ Δ t (3) I(x,y,t)=I(x,y,t)+I{}'_xu+I{}'_yv+I{}'_t\Delta _t \tag{3} I(x,y,t)=I(x,y,t)+Ix′u+Iy′v+It′Δt(3)
即:
I x ′ u + I y ′ v + I t ′ Δ t = 0 (4) I{}'_xu+I{}'_yv+I{}'_t\Delta _t=0 \tag{4} Ix′u+Iy′v+It′Δt=0(4)
公式4写成矩阵形式:
[ I x ′ + I y ′ ] [ u v ] = − I t ′ Δ t = − Δ I t (5) \begin{bmatrix}I{}'_x+I{}'_y\end{bmatrix}\begin{bmatrix}u \\ v\end{bmatrix}=-I{}'_t\Delta _t=-\Delta I_t \tag{5} [Ix′+Iy′][uv]=−It′Δt=−ΔIt(5)
其中, I x ′ , I y ′ I{}'_x,I{}'_y Ix′,Iy′分别为 ( x , y ) (x,y) (x,y)像素点处图像亮度在 x x x方向和 y y y方向的偏导数;
I t ′ I{}'_t It′为 t t t时刻, ( x , y ) (x,y) (x,y)处像素亮度对时间的导数;
I t ′ Δ t I{}'_t\Delta _t It′Δt为两图之间的 ( x , y ) (x,y) (x,y)坐标位置的亮度差,表示为 Δ I t = I t ′ Δ t \Delta I_t=I{}'_t\Delta _t ΔIt=It′Δt
给定两张图片, I x ′ , I y ′ , Δ I t I{}'_x,I{}'_y,\Delta I_t Ix′,Iy′,ΔIt是已知量, u , v u,v u,v即是待求的光流,但仅凭公式5一个等式求解两个未知数 u , v u,v u,v,暂时无法得到唯一解。
所以还需借助第三个假设-空间一致性,假设在一个大小为 m × m ( n = m 2 ) m\times m(n=m^2) m×m(n=m2)的窗口内,图像的光流是一个恒定值,可得:
I x 1 u + I y 1 v = − I t 1 I x 2 u + I y 2 v = − I t 2 ⋯ I x n u + I y n v = − I t n (6) \begin{gather} I_{x1}u+I_{y1}v=-I_{t1} \\ I_{x2}u+I_{y2}v=-I_{t2} \\ \cdots \\ I_{xn}u+I_{yn}v=-I_{tn} \\ \end{gather} \tag{6} Ix1u+Iy1v=−It1Ix2u+Iy2v=−It2⋯Ixnu+Iynv=−Itn(6)
用矩阵形式表示为:
[ I x 1 + I y 1 I x 2 + I y 2 ⋮ I x n + I y n ] [ u v ] = [
相关文章:
)
LK光流法和LK金字塔光流法(含python和c++代码示例)
0 引言 本文主要记录LK光流算法及LK金字塔光流算法的详细原理,最后还调用OpenCV中的cv2.calcOpticalFlowPyrLK()函数实现LK金字塔光流算法,其中第3部分是python语言实现版本,第4部分是c++语言实现版本。 1 LK光流算法 1.1 简述 LK光流法是一种计算图像序列中物体运动的光…...

数据库索引是什么?创建索引的注意事项
数据库索引: 索引(index)是帮助MySQL高效获取数据的数据结构(有效),在数据之外,数据库系统还维护着满足特定查找算法的数据结构,这些数据结构以某种方式引用(指向&#x…...
java中的异常,以及出现异常后的处理【try,catch,finally】
一、异常概念 异常 :指的是程序在执行过程中,出现的非正常的情况,最终会导致JVM的非正常停止。 注意: 在Java等面向对象的编程语言中,异常本身是一个类,产生异常就是创建异常对象并抛出了一个异常对象。Java处理异常的…...

前端构建但没有更新
使用jenkins构建vue前端代码时,构建完成后,jenkins提示构建成功, 但前端刷新提示还是原来的效果,此时需要查看下jenkins构建日志,如果出现下面的文字,说明缺少依赖,最新的代码并没有构建到项目中…...
【Opencv】OpenCV使用CMake和MinGW的编译安装出错解决
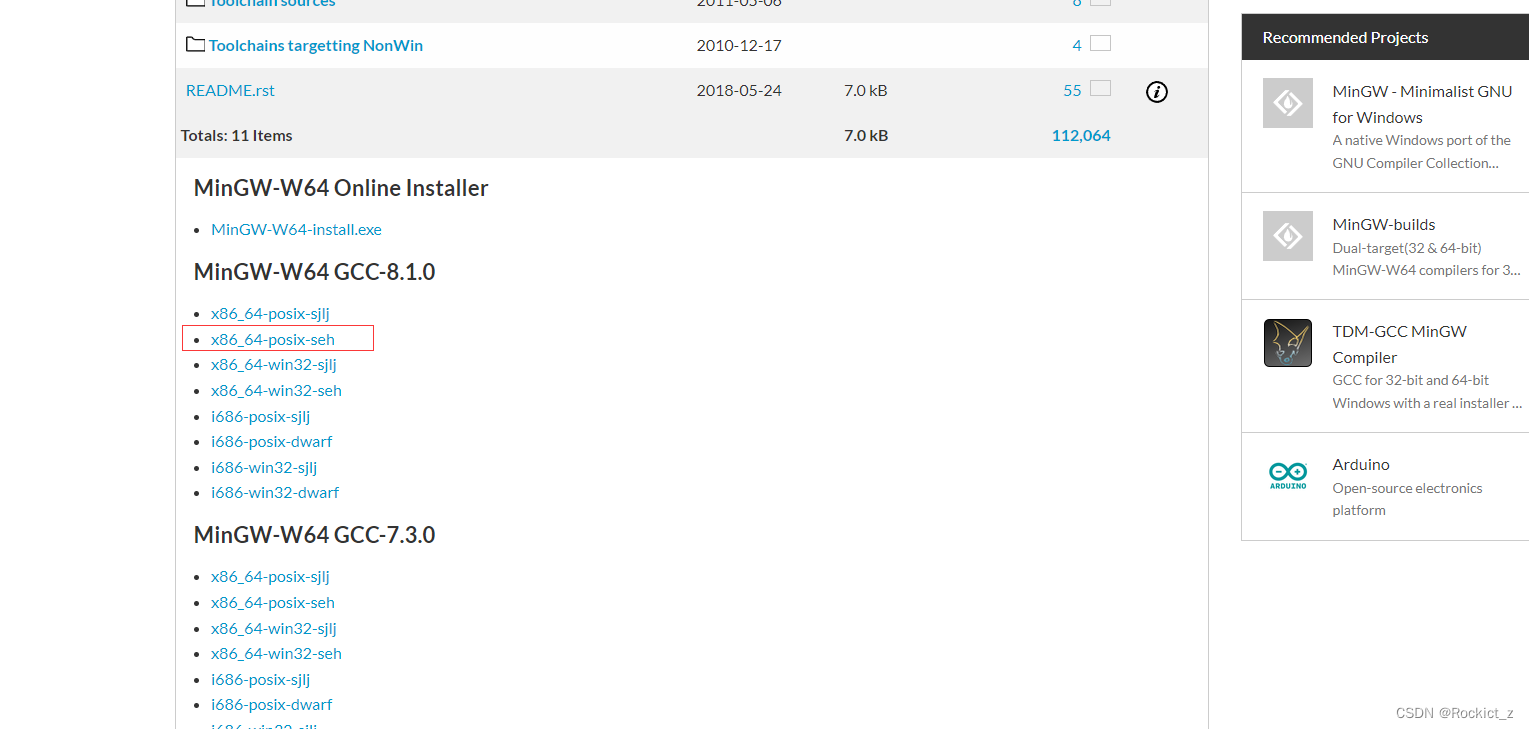
编译时出现的错误: mingw32-make[1]: *** [modules/core/CMakeFiles/opencv_core.dir/all] Error 2 Makefile:161: recipe for target ‘all’ failed mingw32-make: *** [all] Error 2解决方法: 根据贴吧老哥的解答,发现是mingw版本有问题导…...

#Day Day Plan# 《NCB_PCI_Express_Base 5.0.1.0》pdf 译文笔记 模版
目录 一 本章节主讲知识点 1.1 xxx 1.2 sss 1.3 ddd 二 本章节原文翻译 2.1 ddd 三 本章节关联知识点 2.1 ddd 四 本章节存疑问题 2.1 222 五 总结 一 本章节主讲知识点 1.1 xxx 1.2 sss 1.3 ddd 二 本章节原文翻译 2.1 ddd 三 本章节关联知识点 2.1 ddd 四…...
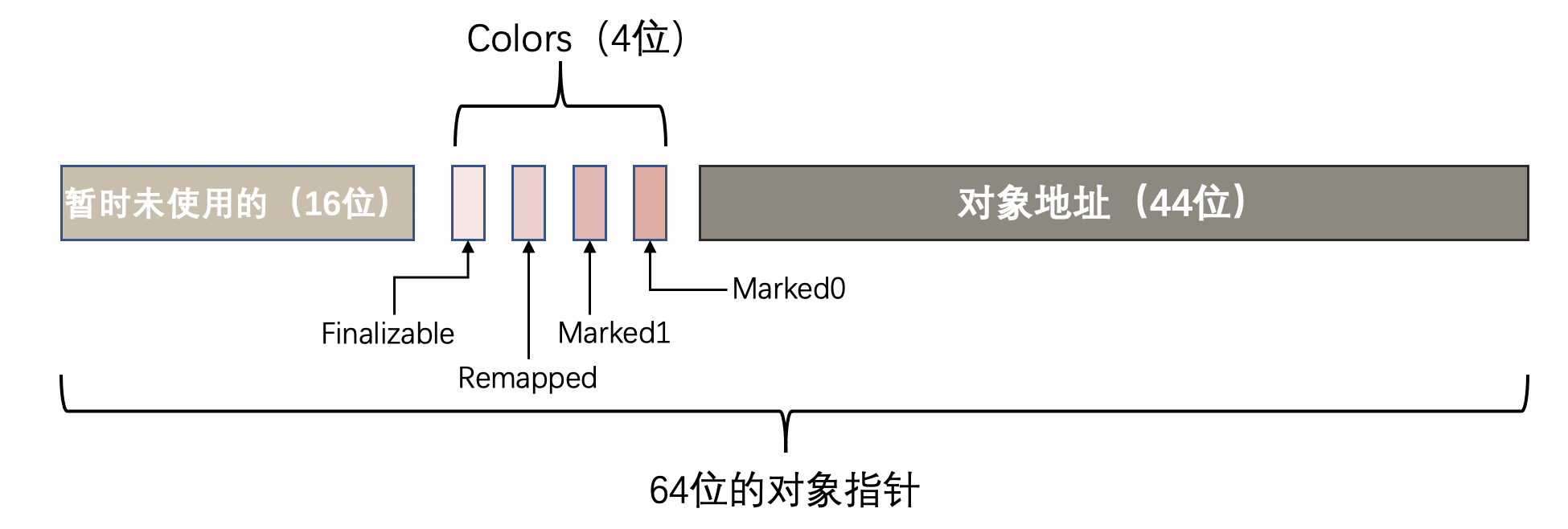
分代ZGC详解
ZGC(Z Garbage Collector)是Java平台上的一种垃圾收集器,它是由Oracle开发的,旨在解决大堆的低延迟垃圾收集问题。ZGC是一种并发的分代垃圾收集器,它主要针对具有大内存需求和低停顿时间要求的应用程序 分代ZGC收集器…...

vue图片懒加载
Vue图片懒加载是一种优化页面性能的技术,它可以延迟加载页面上的图片,直到它们进入可见区域。这可以减少页面的加载时间,提高用户体验。 在Vue中实现图片懒加载可以使用第三方库vue-lazyload。首先需要安装该库: npm install vu…...

【c++】运算符重载实例
重载自增自减运算符 Intger num(2); num; num;对自增运算符的重载要区分前置和后置。在重载之前需要思考一个问题,num是返回一个临时变量还是num对象的本体。 为了解决这个问题可以考虑实现一个Inc_()函数和_Inc()函数分别模仿后置和前置的行为 Integer Inc_(){i…...

用*画田字形状,numpy和字符串格式化都可以胜任
numpy的字符型元素矩阵,可以方便画;直接python字符串手撕,也可以轻巧完成。 (本笔记适合熟悉循环和列表的 coder 翻阅) 【学习的细节是欢悦的历程】 Python 官网:https://www.python.org/ Free:大咖免费“圣经”教程《…...

搭建一个windows的DevOps环境记录
边搭建边记录,整个DevOps环境的搭建可能会很久。。。 一、安装Jenkins: 参考:Jenkins基础篇--windows安装Jenkins-CSDN博客 注意上面选择JDK的路径,选择到安装目录,该目录并不一定要在path中配置了(就是…...

漏洞扫描系统的主要功能有哪些
漏洞扫描系统是一种自动化的工具,用于发现和报告计算机网络系统中的安全漏洞。这些漏洞可能包括软件漏洞、配置错误、不安全的网络设备等。漏洞扫描系统的主要功能包括以下几个方面: 目标识别:漏洞扫描系统首先需要识别目标系统的基本信息&am…...

Spring Boot配置多个Kafka数据源
一、配置文件 application.properties配置文件如下 #kafka多数据源配置 #kafka数据源一,日志审计推送 spring.kafka.one.bootstrap-servers172.19.12.109:32182 spring.kafka.one.producer.retries0 spring.kafka.one.producer.properties.max.block.ms5000 #kafk…...
)
Learning Open-World Object Proposals without Learning to Classify(论文解析)
Learning Open-World Object Proposals without Learning to Classify 摘要1 介绍2 相关工作3 方法3.1 基线3.2 基于纯定位的对象性3.3. 对象定位网络 (OLN)4 实验4.1跨类泛化4.2.开放世界类不可知检测4.3更多的跨数据集泛化4.3.1 Objects365 泛化4.3.2 EpicKitchens 的泛化4.4…...

前端在项目中添加自己的功能页面
1.src—>mock–>sideMenue:边表(sidemenue)的子功能的添加:左边功能框中的显示 在相应的父功能添加子功能 id号不能和他人的一样,casecode:就是路由名字 title:中文名称 2.前后端接口(后端程序员给),定义好接口名称 src—>moudles—…...
:DDL数据定义语言)
数据库MySQL(二):DDL数据定义语言
数据定义语言(Data Definition Language,DDL) 该语言主要用于定义数据库对象,操作对象为数据库、表或字段。 数据库操作 # 查询所有数据库 SHOW DATABASES;# 查询当前数据库 SELECT DATABASE(); # 创建数据库 CREATE DATABASE […...
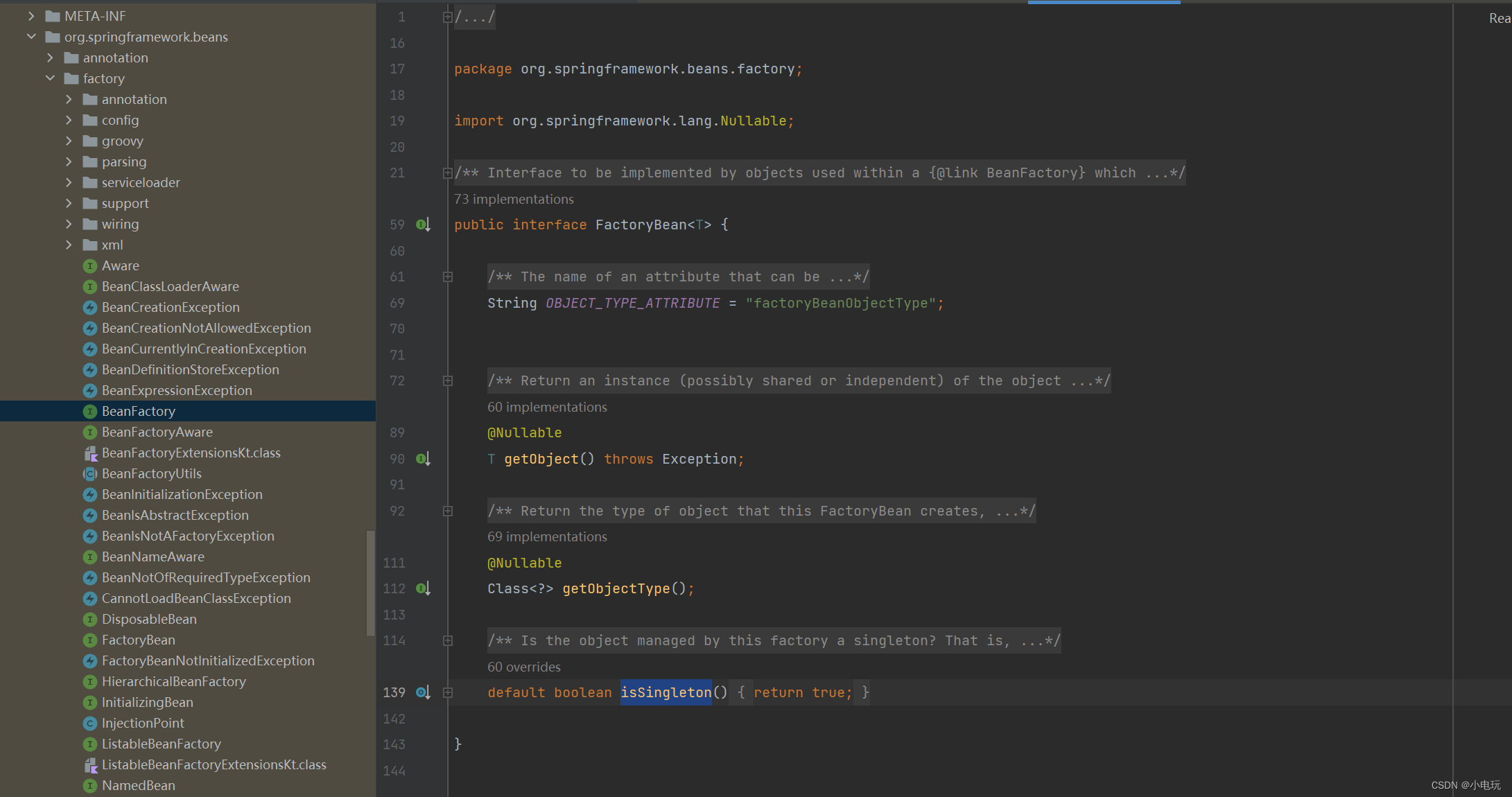
Spring FactoryBean 源码讲解
Spring FactoryBean 源码讲解 什么是Spring FactoryBean Spring FactoryBean是一个特殊的Bean,它实现了FactoryBean接口并重写了其getObject()方法,用于生产其他Bean的实例。在Spring容器启动时,会自动调用FactoryBean的getObject()方法来获…...

【C语言】零碎知识点|细节
除法运算符(/)的使用规则 在C语言中,除法运算符(/)的使用规则如下: 当两个整数相除时,结果也是一个整数。例如,如果A和B都是整数,那么A / B的结果也是一个整数。这意味着,除法运算的结果会忽略小数部分。例如,10 / 3 的结果是3,而不是3.3333。 当一个整数和一个浮点…...
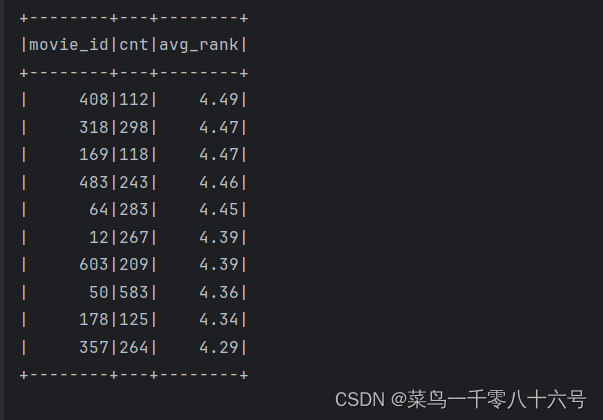
电影评分数据分析案例-Spark SQL
# cording:utf8from pyspark.sql import SparkSession from pyspark.sql.types import IntegerType, StringType, StructType import pyspark.sql.functions as Fif __name__ __main__:# 0.构建执行环境入口对象SparkSessionspark SparkSession.builder.\appName(movie_demo)…...
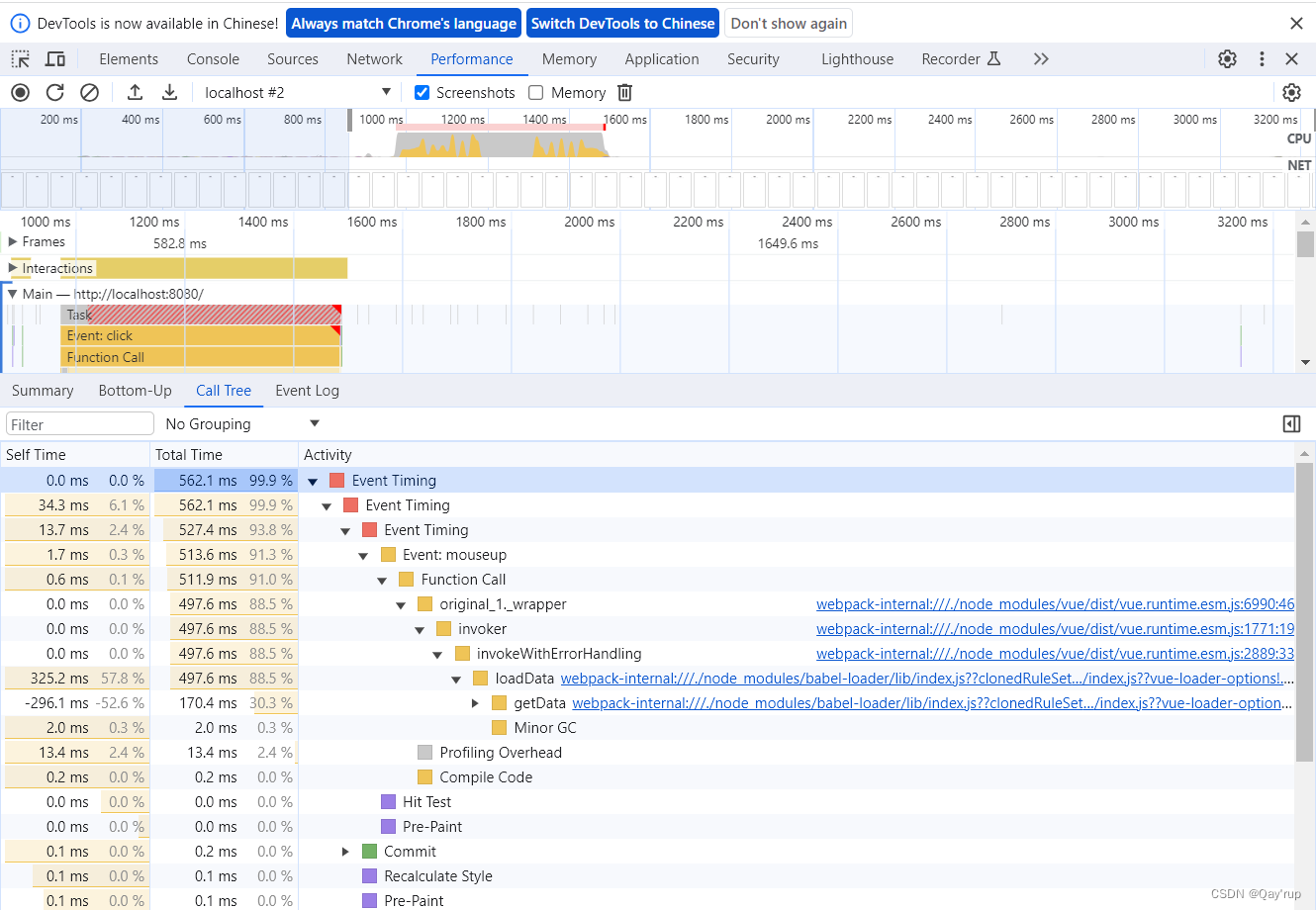
vue如何使用冻结对象提升代码效率及其原理解析
先给大家伙整个实际工作中一定会碰到的问题 如下vue dome ,它的代码非常简单功能也1非常简单,就是一个按钮,点击后会显示有多少条数据 来看看源码, html部分就是一个按钮绑定了一个loadData事件,然后在p标签内展示了这个myData这个数据的长度 <template><div id&quo…...

专业术语统计报告_多种能源发电协同发展管控模型及大数据分析研究
专业术语统计报告_多种能源发电协同发展管控模型及大数据分析研究 一、概要简析 【概要分析】 本文档《多种能源发电协同发展管控模型及大数据分析研究》围绕研究主题展开系统性的探讨。文档总字符数达141569,其中中文字符80856个,英文字词5332个&#x…...

LaTeX公式一键转换Word:学术写作的效率革命
LaTeX公式一键转换Word:学术写作的效率革命 【免费下载链接】LaTeX2Word-Equation Copy LaTeX Equations as Word Equations, a Chrome Extension 项目地址: https://gitcode.com/gh_mirrors/la/LaTeX2Word-Equation 作为一名研究生,你是否曾经为…...

大模型学习笔记------SAM模型架构拆解与实战指引
1. SAM模型架构全景拆解 第一次看到SAM模型时,就像拿到了一台精密的瑞士手表——外表简洁但内部构造复杂。这个由Meta提出的"分割一切"模型,确实改变了计算机视觉领域的游戏规则。想象一下,你只需要在图片上随便点几个点࿰…...
Pixel Dimension Fissioner 社交媒体内容生成:自动化生产像素风格营销图片
Pixel Dimension Fissioner 社交媒体内容生成:自动化生产像素风格营销图片 1. 社交媒体运营的视觉内容困境 每天打开社交媒体后台,运营团队最头疼的问题总是惊人的一致:内容不够发。特别是需要大量视觉素材的节日营销期,设计师加…...

影墨·今颜模型Win11/Win10系统UI风格适配与生成测试
影墨今颜模型Win11/Win10系统UI风格适配与生成测试 最近在折腾桌面美化,突然冒出一个想法:现在AI生成图片这么厉害,能不能让它直接帮我生成一套风格统一的系统UI元素呢?比如Win11那种清爽现代的图标,或者Win10那种经典…...

避开时区陷阱:React Spectrum日期时间处理完全指南
避开时区陷阱:React Spectrum日期时间处理完全指南 【免费下载链接】react-spectrum A collection of libraries and tools that help you build adaptive, accessible, and robust user experiences. 项目地址: https://gitcode.com/GitHub_Trending/re/react-sp…...

山东大学软件学院项目实训【个人1】
实验准备 经小组成员讨论最终决定开发基于大模型的法律文书智能摘要系统,由四人分工协作完成多源文档解析与数据预处理、结构化信息抽取与向量化存储、角色感知的个性化摘要生成、原文溯源与功能增强、文档分析管理与交互五个模块的内容。 创建gitee账号做好与队友…...

EZModbus:面向ESP32的异步无锁Modbus C++库
1. EZModbus项目概述EZModbus是一个专为ESP32平台设计的C Modbus通信库,深度集成FreeRTOS实时操作系统,支持Arduino IDE与原生ESP-IDF两种开发框架。该库并非对现有Modbus协议栈的简单封装,而是从零构建的异步事件驱动型实现,其核…...

从API调用到完整应用:手把手教你用Dashscope和Streamlit搭建一个多模态聊天机器人
从API调用到完整应用:手把手教你用Dashscope和Streamlit搭建多模态聊天机器人 在AI技术快速落地的今天,将强大的API能力转化为直观可用的产品已成为开发者的核心技能。想象一下,你只需要200行Python代码,就能构建一个能"看懂…...

告别环境冲突:基于快马平台与homebrew打造团队高效统一开发环境
作为一名长期与团队协作的开发者,我深刻体会到环境配置不一致带来的痛苦。新同事入职要花一整天配环境,不同项目依赖冲突导致"在我机器上能跑"的经典问题,甚至同一项目组因为系统更新节奏不同而出现隐性兼容问题。最近尝试用homebr…...