MoveIT Rviz和Gazebo联合仿真
文章目录
- 环境
- 安装
- 概述
- ros_control框架
- ros_control数据流
- 文件配置
- 附加工具
- 故障问题解决
- 参考
接前两篇:
ROS MoveIT1(Noetic)安装总结
Solidworks导出为URDF用于MoveIT总结(带prismatic)
MoveIT1 Assistant 总结
环境
- Ubuntu20.04;
- ROS1 Noetic;
- VMware
安装
sudo apt-get install ros-noetic-joint-state-controller
sudo apt-get install ros-noetic-effort-controllers
sudo apt-get install ros-noetic-position-controllers
sudo apt-get install ros-noetic-joint-trajectory-controller
sudo apt-get install ros-noetic-controller-manager
sudo apt-get install ros-noetic-gazebo-ros-control
sudo apt-get install ros-noetic-ros-controllers
概述
URDF 用于创建机器人模型、Rviz 可以显示机器人感知到的环境信息,Gazebo 用于物理环境仿真。
先在Moveit!端配置关节和传感器接口yaml文件,将其加载到rviz端;再在机器人端配置ros_control和接口yaml文件,将机器人加载到Gazebo。
最后同时启动加载有ros_control的Gazebo和加载有Moveit的rviz,达到联合仿真的目的。
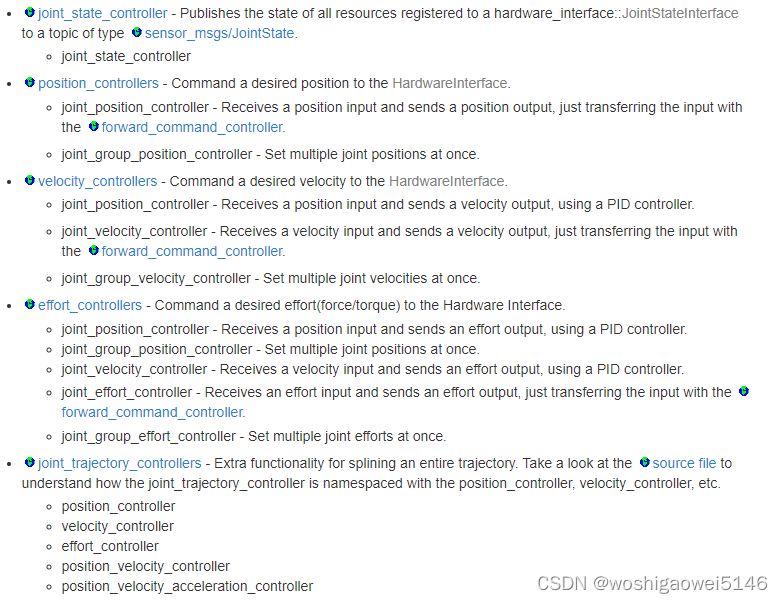
ros_control框架
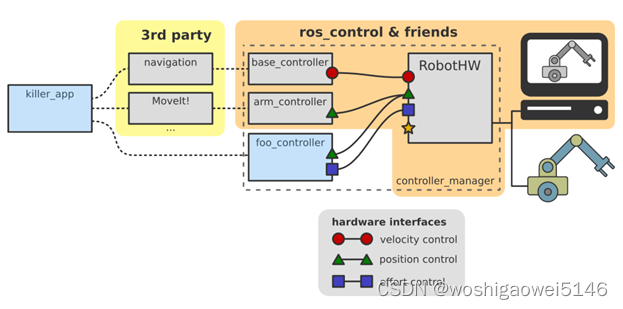
ros_control包由以下几部分:
-
combined_robot_hw(硬件包):一个允许将多个RobotHW组合成一个“RobotHW”的软件包。
-
controller_interface(controller接口)
-
controller_manager(controller管理器):提供了一个近乎实时的controller管理器,用于管理(加载、卸载、启停)controllers。
-
controller_manager_msg(controller管理器的消息类型):定义了controller的状态消息类型msg,以及调用controller_manager的服务类型srv。
-
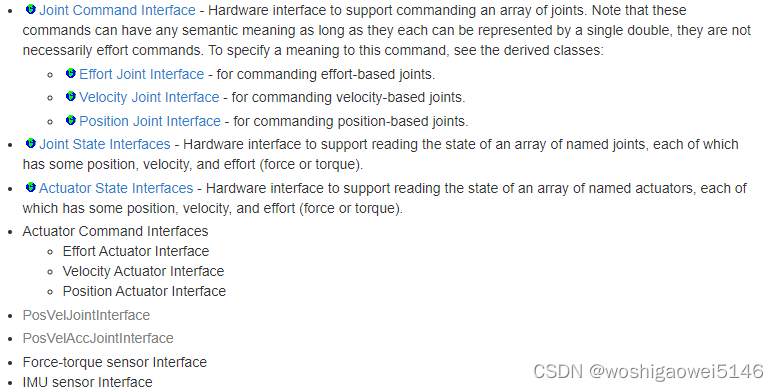
hardware_interface(硬件底层的接口):向硬件发送(write())命令并从硬件接收(read())联合状态。
https://github.com/ros-controls/ros_control/wiki/hardware_interface
-
joint_limits_interface(joints限制接口):根据URDF中的limit标签,将joint limit载入到硬件层中。
-
transmission_interface(传动接口):根据URDF中的transmission标签将该关系载入到硬件层中。
-
realtime_tools(实时控制工具):包含一组可以从硬实时线程中使用的工具,而不会破坏实时行为。
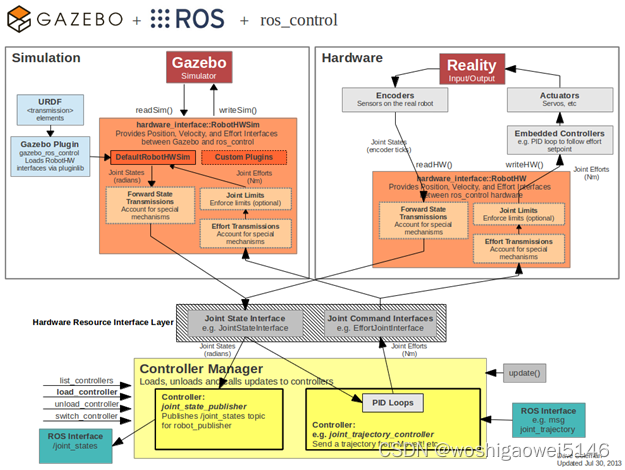
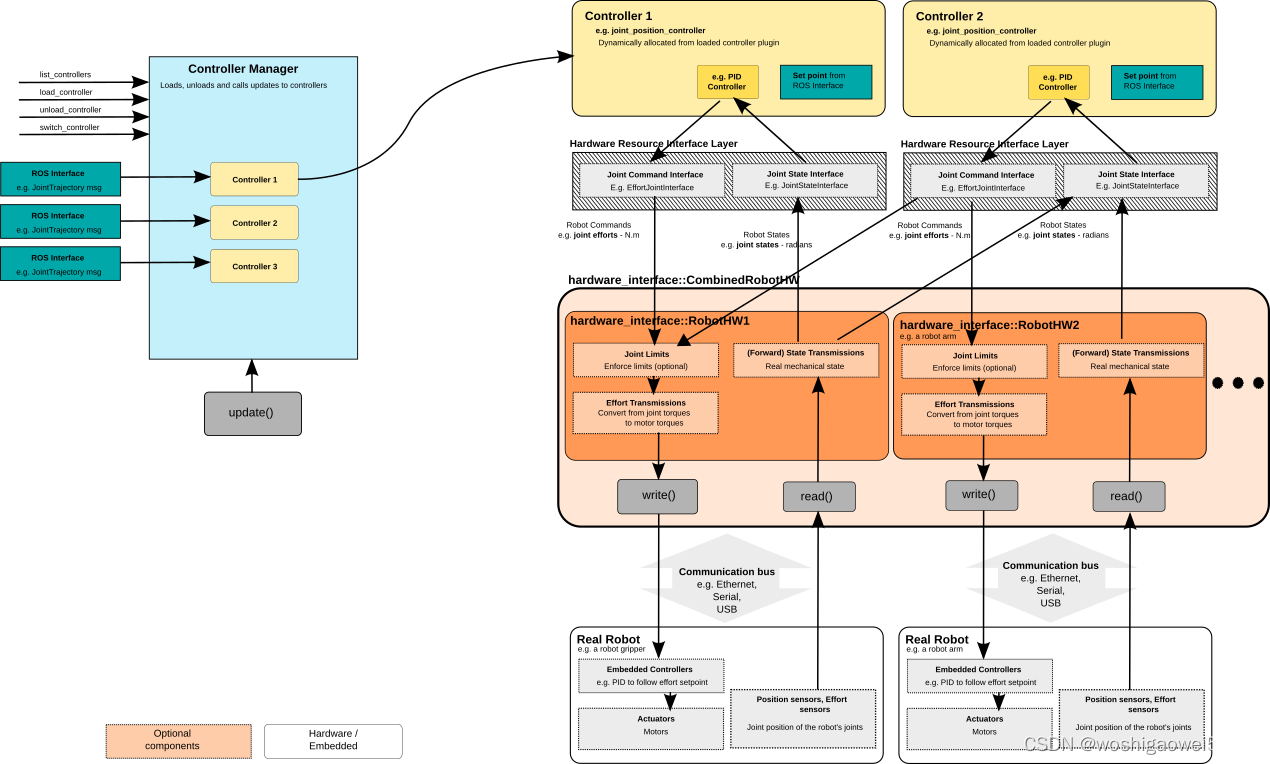
ros_control数据流
-
Controller Manager:每个机器人可能有多个controller,所以这里有一个控制器管理器的概念,提供一种通用的接口来管理不同的controller。controller manager的输入就是ROS上层应用的输出。
-
Controller:controller可以完成每个joint的控制,请求下层的硬件资源,并且提供了PID控制器,读取硬件资源接口中的状态,在发布控制命令。
-
Hardware Rescource:为上下两层提供硬件资源的接口。
-
RobotHW:硬件抽象层和硬件直接打交道,通过write和read方法来完成硬件的操作,这一层也包含关节限位、力矩转换、状态转换等功能。
-
Real Robot:实际的机器人上也需要有自己的嵌入式控制器,接收到命令后需要反映到执行器上,比如接收到位置1的命令后,那就需要让执行器快速、稳定的到达位置1。
【控制流】
ROS中的Controller manager接收load_controller、unload_controller等命令来加载和运行不同类型的controller(例如joint_position),这些controller通过Hardware Resource接口向硬件抽象层RobotHW读取和发布控制命令,这些命令再输入到机器人上的嵌入控制器上,然后有执行器执行。
文件配置
/home/gw2/ws_moveit/src/assis_1/config/robot_controller.yaml中定义的是"position_controllers/JointTrajectoryController",则URDF中定义的transmission中如果使用的是PositionJointInterface必须要对应,否则会提示找不到controller。
<transmission name="trans_Joint1"><type>transmission_interface/SimpleTransmission</type><joint name="Joint1"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface></joint><actuator name="Joint1_motor"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission><transmission name="trans_Joint2"><type>transmission_interface/SimpleTransmission</type><joint name="Joint2"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface></joint><actuator name="Joint2_motor"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission><transmission name="trans_Joint3"><type>transmission_interface/SimpleTransmission</type><joint name="Joint3"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface></joint><actuator name="Joint3_motor"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission><transmission name="trans_Joint4"><type>transmission_interface/SimpleTransmission</type><joint name="Joint4"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface></joint><actuator name="Joint4_motor"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission><transmission name="trans_Joint5"><type>transmission_interface/SimpleTransmission</type><joint name="Joint5"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface></joint><actuator name="Joint5_motor"><hardwareInterface>hardware_interface/PositionJointInterface</hardwareInterface><mechanicalReduction>1</mechanicalReduction></actuator></transmission>
在urdf中加入gazebo的ros_control插件,如果不加,运行gazebo会显示机械臂都耷拉在地上,仿佛电机没有使能一样。
<gazebo><plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so"><plugin name="joint_state_publisher" filename="libgazebo_ros_joint_state_publisher.so"><jointName>Joint1,Joint2,Joint3,Joint4,Joint5</jointName></plugin><robotNamespace>/</robotNamespace></plugin></gazebo>
检查ros_controllers.launch的args="control"不要有空格。
修改ros_controllers.yaml:
control:type: position_controllers/JointTrajectoryControllerjoints:- Joint1- Joint2- Joint3- Joint4- Joint5gains:Joint1: { p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint2: { p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint3: { p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint4: { p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint5: { p: 12000, d: 50, i: 0.0, i_clamp: 10000 }
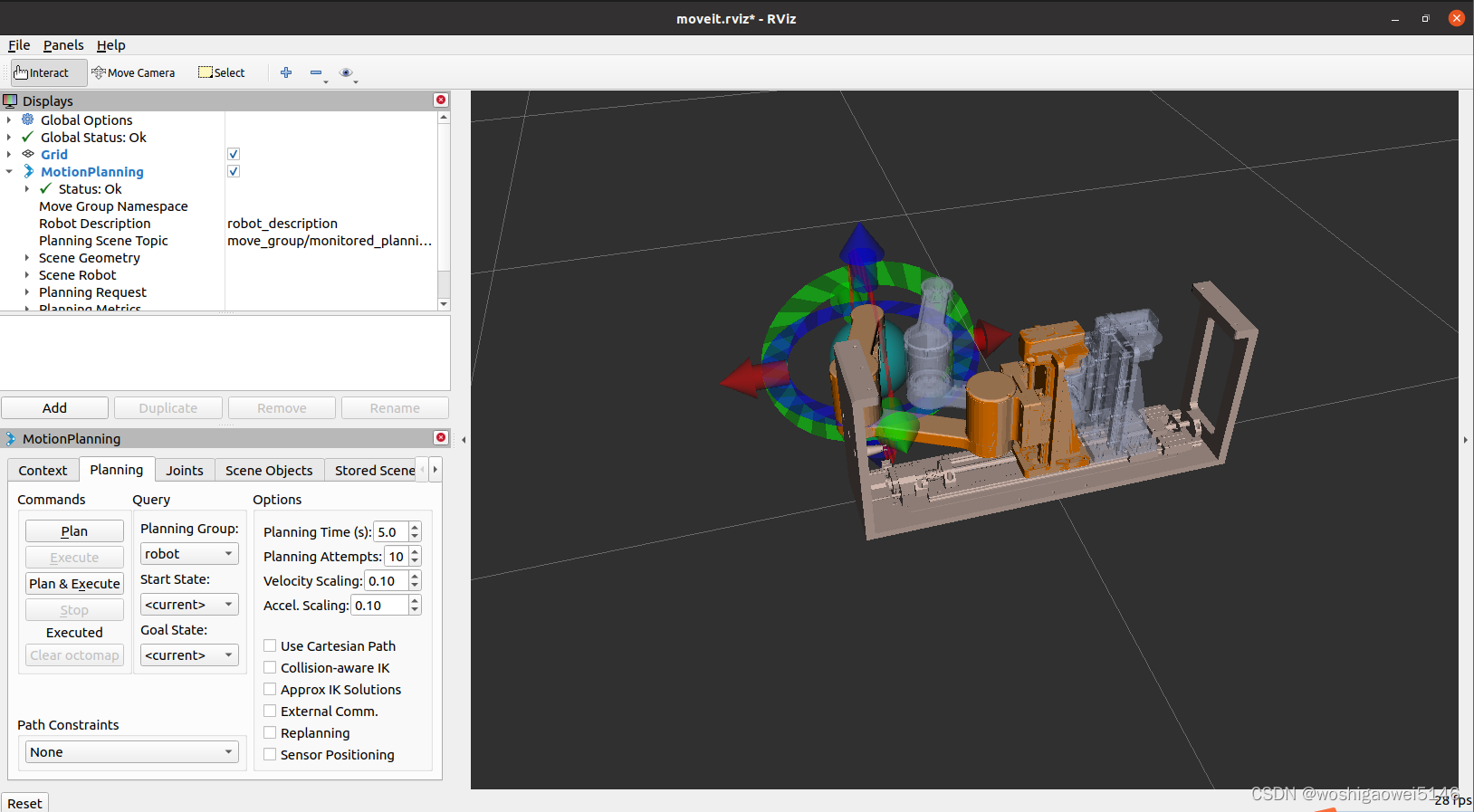
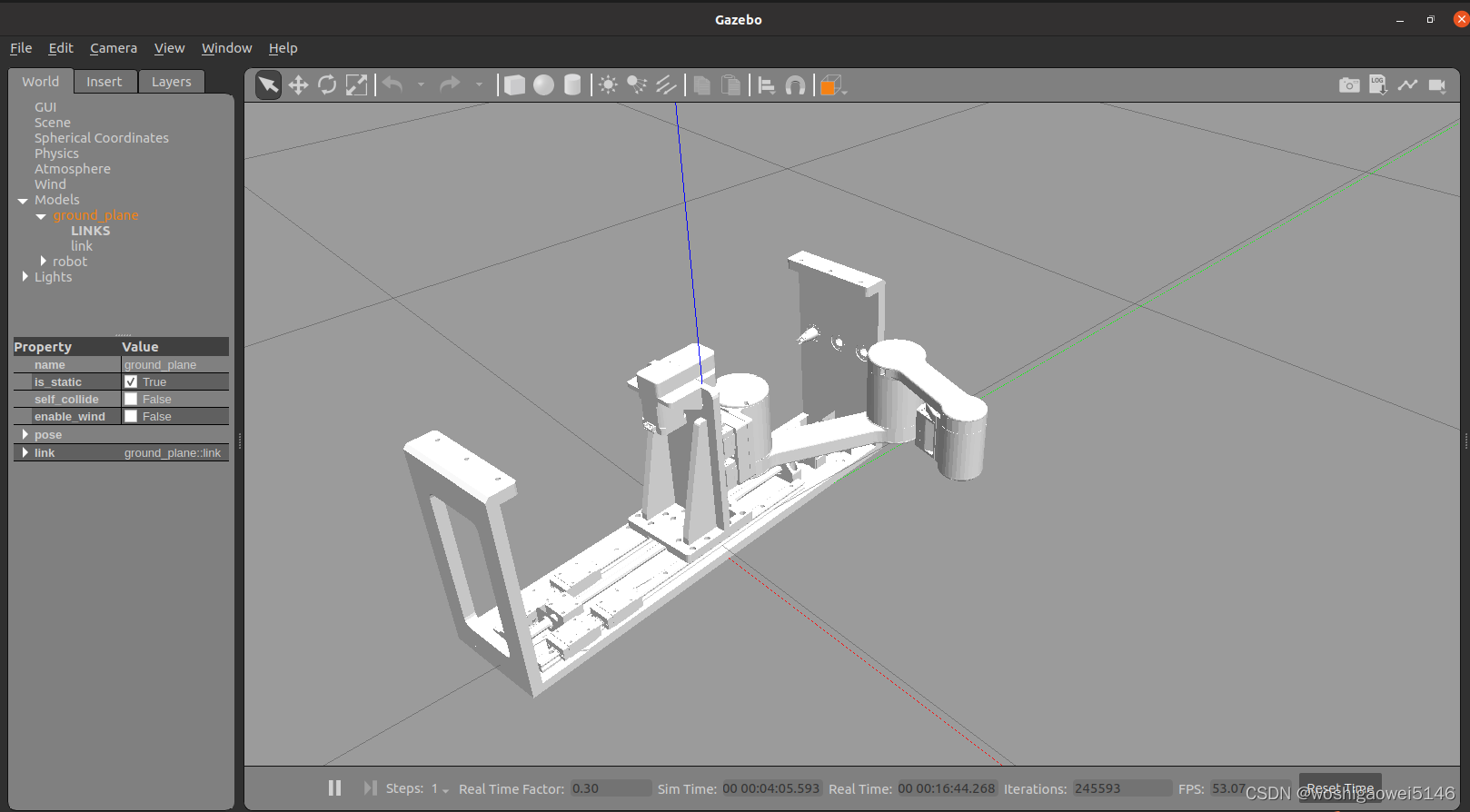
运行rviz和gazebo:
source ~/ws_moveit/devel/setup.bash
roslaunch assis_1 demo_gazebo.launch
可以看到Rviz中的运动在Gazebo中可以同步运动。
附加工具
rqt_graph
创建一个显示当前系统ROS程序运行情况的动态图形
安装:
sudo apt install ros-noetic-rqt
sudo apt install ros-noetic-rqt-common-plugins
运行:
rosrun rqt_graph rqt_graph
可以看到结果:
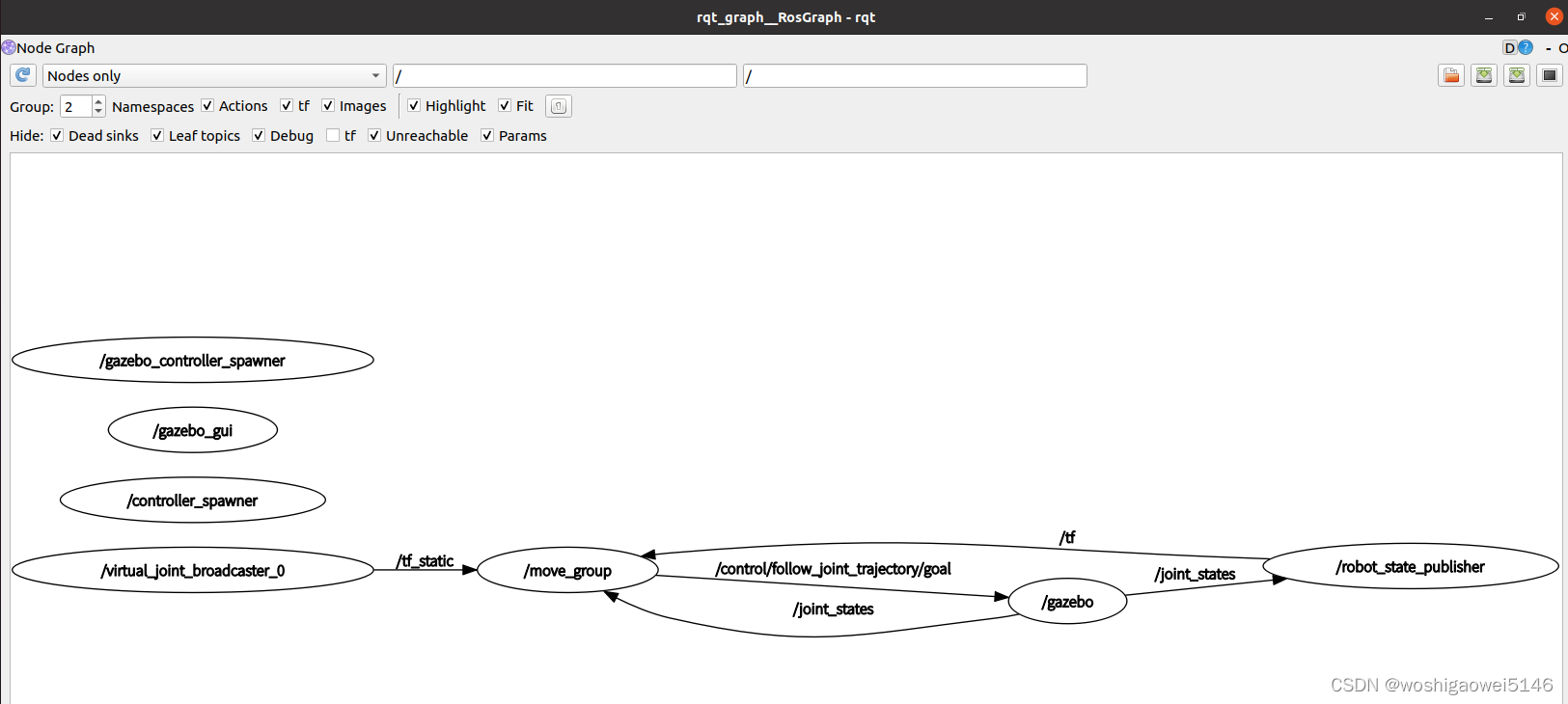
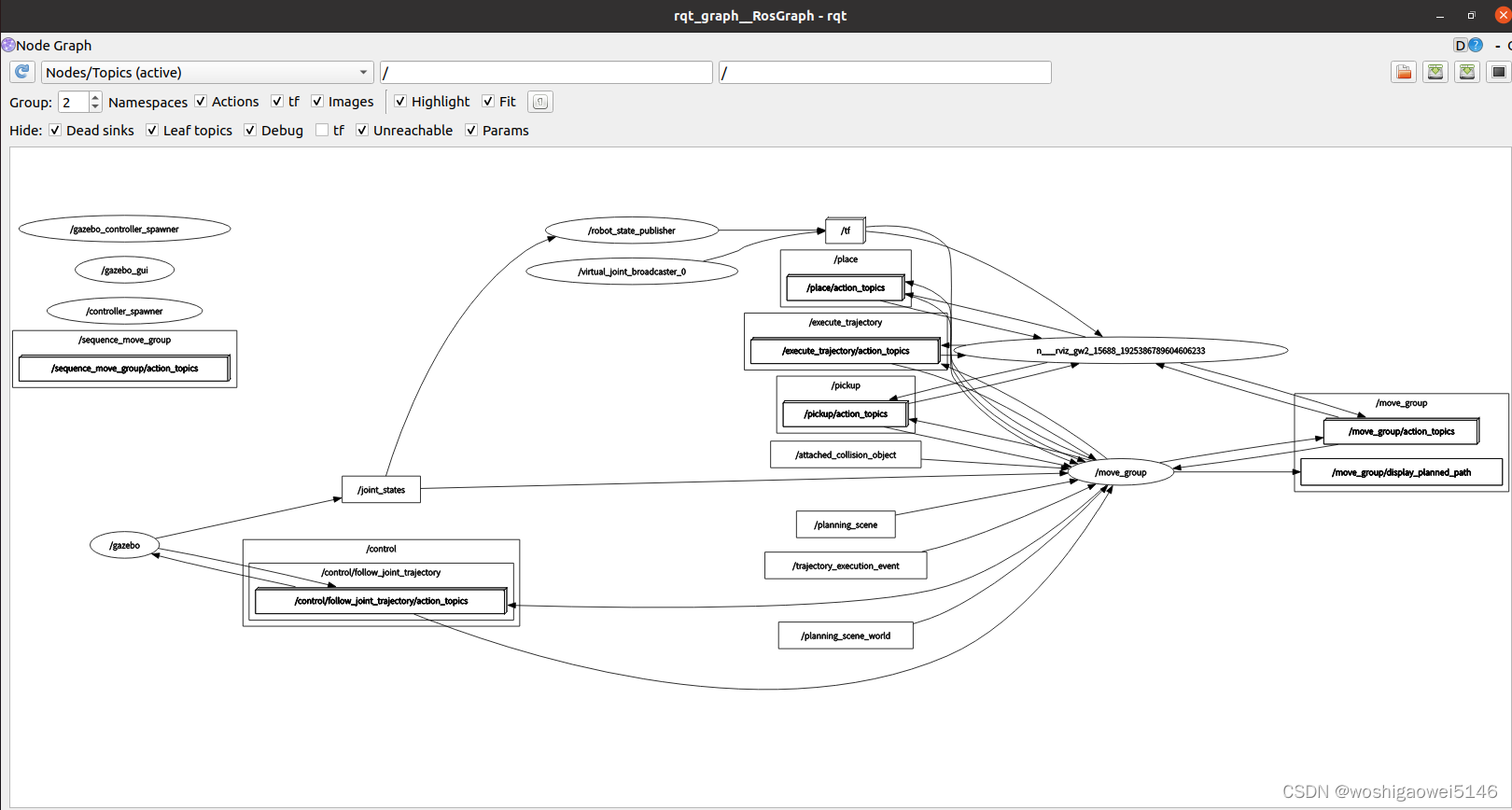
通过这个图可以看到:
/move_group发送/control/follow_joint_trajectory/goal【目标位置】到机器人,机器人发送/joint_states【轴状态】到/move_group和/robot_state_publisher
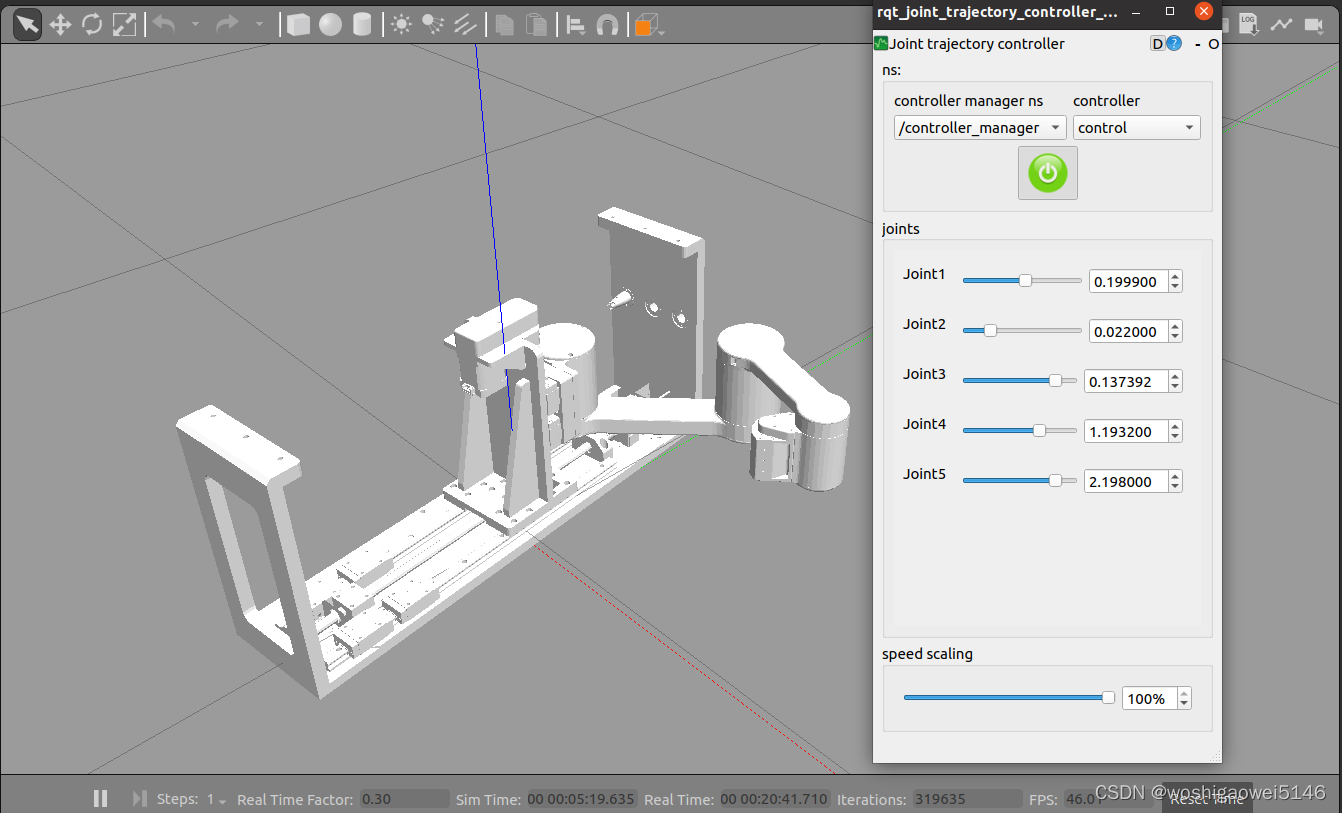
rqt_joint_trajectory_controller
安装:
sudo apt-get install ros-noetic-rqt-joint-trajectory-controller
运行:
roslaunch assis_1 demo_gazebo.launch 或 roslaunch assis_1 gazebo.launch
rosrun rqt_joint_trajectory_controller rqt_joint_trajectory_controller
效果:拖动进度条可以在Gazebo实现各个关节的运动。
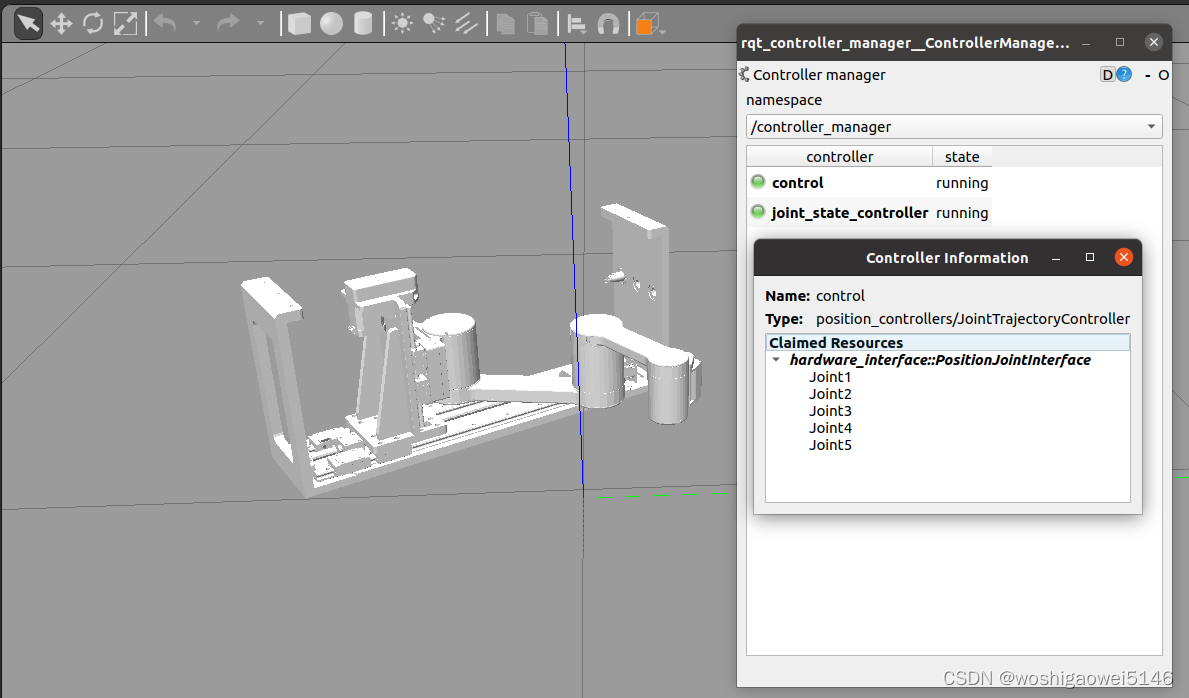
rqt_controller_manager
rqt插件,该插件以图形化方式加载,卸载,启动和停止控制器;同时用来显示加载的控制器的信息。
安装:
sudo apt-get install ros-noetic-rqt-controller-manager
运行:可以看到control和joint_state_controller两个控制器。
rosrun rqt_controller_manager rqt_controller_manager
故障问题解决
Spawn service failed. Exiting.
cmd /opt/ros/noetic/lib/gazebo_ros/gzserver -e ode worlds/empty.world
parse as old deprecated model file failed.
这三个错误往往一起出现,最后通过在urdf文件中添加解决:
filename=“libgazebo_ros_control.so”
https://blog.csdn.net/qq_60018807/article/details/128543981
ERROR: cannot launch node of type [controller_manager/spawner]: controller_manager接着一堆错误。
sudo apt-get install ros-kinetic-controller-manager
https://blog.csdn.net/weixin_45839124/article/details/106589576
模型自己转动,乱跑
sudo apt-get install ros-noetic-gazebo-ros-control
[ERROR] [1675950367.646886773, 0.307000000]: Failed to initialize the controller
[ERROR] [1675950367.649888591, 0.308000000]: Initializing controller ‘control’ failed
[ERROR] [1675950368.653177, 0.650000]: Failed to load control
在ros_controllers.yaml中添加前述代码。
[ERROR] [1675950605.984213275]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/Joint1
[ERROR] [1675950605.988813331]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/Joint2
[ERROR] [1675950605.991700327]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/Joint3
[ERROR] [1675950605.995635439]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/Joint4
[ERROR] [1675950605.999769977]: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/Joint5
添加修改ros_controllers.yaml文件:
/gazebo_ros_control:
pid_gains:
control:type: position_controllers/JointTrajectoryControllerjoints:- Joint1- Joint2- Joint3- Joint4- Joint5/gazebo_ros_control:pid_gains:Joint1: {p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint2: {p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint3: {p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint4: {p: 12000, d: 50, i: 0.0, i_clamp: 10000 }Joint5: {p: 12000, d: 50, i: 0.0, i_clamp: 10000 }
但是加上以后发现Gazebo模型开始扭动起来,没眼看。最终无视这个错误即可。
https://blog.csdn.net/qq_32896521/article/details/111143282?spm=1001.2014.3001.5501
https://zhuanlan.zhihu.com/p/392635284
参考
https://blog.csdn.net/qq_34935373/article/details/95886151
https://ros-planning.github.io/moveit_tutorials/doc/gazebo_simulation/gazebo_simulation.html
http://www.guyuehome.com/890
https://blog.csdn.net/qq_41035283/article/details/120572465
http://wiki.ros.org/ros_control?distro=noetic
相关文章:
MoveIT Rviz和Gazebo联合仿真
文章目录环境安装概述ros_control框架ros_control数据流文件配置附加工具故障问题解决参考接前两篇:ROS MoveIT1(Noetic)安装总结 Solidworks导出为URDF用于MoveIT总结(带prismatic) MoveIT1 Assistant 总结 环境 Ubu…...
-DS18B20数码管显示温度)
ESP32S2(12K)-DS18B20数码管显示温度
一、物料清单: NODEMCU-32-S2 (ESP32-12K)四段数码管(共阴)DS18B20(VCC/DQ/GND)Arduino-IDE 2.0.3二、实现方法及效果图: 2.1 引用库 // #include <OneWire.h> //可以不引入,因为DallasTemperature.h中已经引入了OneWire.h #include <DallasTemperature.h>#…...

linux栈溢出定位
一、编译选项定位堆栈溢出 来源:堆栈溢出检测机制 - SkrSky - 博客园 1、栈溢出可能打印 unhandled level 1 translation fault (11) at 0x7f8d0347, esr 0x92000005 2、栈溢出保护机制 gcc提供了栈保护机制stack-protector(编译选项-fstack-protec…...
CSS基础:选择器和声明样式
CSS概念 CSS(Cascading Style Sheets)层叠样式表,又叫级联样式表,简称样式表 CSS用于HTML文档中元素样式的定义 使用css让网页具有美观一致的页面 语法 CSS 规则由两个主要的部分构成:选择器和声明样式 选择器通常…...
VS中安装gismo库
文章目录前言一、下载安装paraview直接下载压缩包安装就可以了解压后按步骤安装即可二、gismo库的安装gismo库网址第一种方法:第二种方法第三种方法:用Cmake软件直接安装首先下载cmake软件[网址](https://cmake.org/download/)安装gismo库三、gismo库的使…...
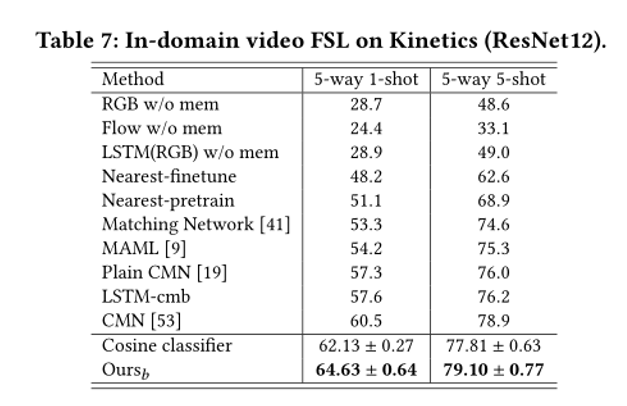
元学习方法解决CDFSL以及两篇SOTA论文讲解
来源:投稿 作者:橡皮 编辑:学姐 带你学习跨域小样本系列1-简介篇 跨域小样本系列2-常用数据集与任务设定详解 跨域小样本系列3:元学习方法解决CDFSL以及两篇SOTA论文讲解(本篇) 跨域小样本系列4…...
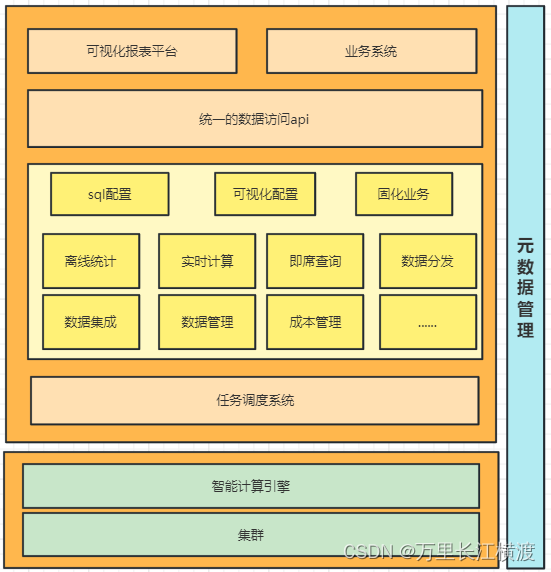
大数据之------------数据中台
一、什么是数据中台 **数据中台是指通过数据技术,对海量数据进行采集、计算、存储、加工,同时统一标准和口径。**数据中台的目标是让数据持续用起来,通过数据中台提供的工具、方法和运行机制,把数据变为一种服务能力,…...

Python 中 字符串是什么?
字符串是 Python 中最常用的数据类型。我们可以使用引号 ( ’ 或 " ) 来创建字符串。 创建字符串很简单,只要为变量分配一个值即可。例如: var1 ‘Hello World!’ var2 “Python Runoob” Python 访问字符串中的值 Python 不支持单字符类型&…...

OJ刷题Day1 · 一维数组的动态和 · 将数字变成 0 的操作次数 · 最富有的客户资产总量 · Fizz Buzz · 链表的中间结点 · 赎金信
一、一维数组的动态和二、将数字变成 0 的操作次数三、最富有的客户资产总量四、Fizz Buzz五、链表的中间结点六、赎金信一、一维数组的动态和 给你一个数组 nums 。数组「动态和」的计算公式为:runningSum[i] sum(nums[0]…nums[i]) 。 请返回 nums 的动态和。 示…...

【数据结构】栈——必做题
逆波兰表达式后缀表达式的出现是为了方便计算机处理,它的运算符是按照一定的顺序出现,所以求值过程中并不需要使用括号来指定运算顺序,也不需要考虑运算符号(比如加减乘除)的优先级。先介绍中简单的人工转化方法&#…...
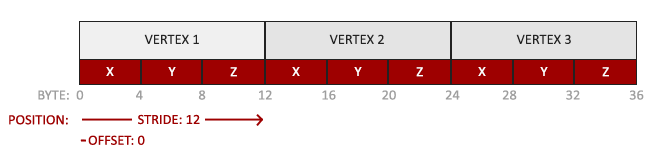
LearnOpenGL 笔记 - 入门 04 你好,三角形
系列文章目录 LearnOpenGL 笔记 - 入门 01 OpenGLLearnOpenGL 笔记 - 入门 02 创建窗口LearnOpenGL 笔记 - 入门 03 你好,窗口 文章目录系列文章目录前言你好,三角形顶点输入顶点着色器(Vertex Shader)编译着色器片段着色器&…...
keepalived+mysql高可用
一.设置mysql同步信息两节点安装msyql略#配置节点11.配置权限允许远程访问mysql -u root -p grant all on *.* to root% identified by Root1212# with grant option; flush privileges;2.修改my.cnf#作为主节点配置(节点1)#作为主节点配置 server-id 1 …...
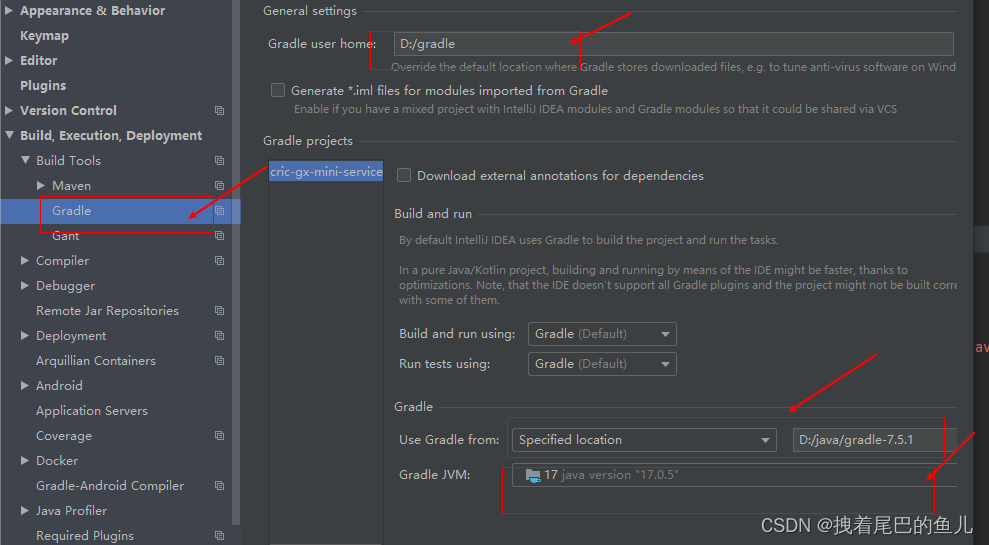
JAVA工具篇--1 Idea中 Gradle的使用
前言: 既然我们已经使用Maven 来完成对项目的构建,为什么还要使用Gradle 进行项目的构建;gradle和maven都可以作为java程序的构建工具,但两者还是有很大的不同之处的:1.可扩展性,gradle比较灵活,…...

弄懂自定义 Hooks 不难,改变开发认知有点不习惯
前言 我之前总结逻辑重用的时候,就一直在思考一个问题。 对于逻辑复用,render props 和 高阶组件都可以实现,同样官方说 Hooks 也可以实现,且还是在不增加额外的组件的情况下。 但是我在项目代码中,没有找到自定义 …...
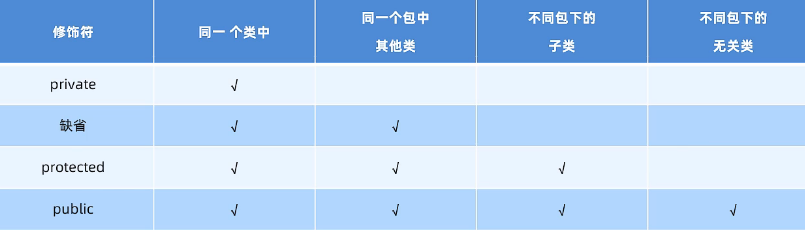
Java面向对象基础
文章目录面向对象类注意事项内存机制构造器this关键字封装javabean格式成员变量和局部变量区别static静态关键字使用成员方法使用场景内存机制注意事项static应用:工具类static应用:代码块静态代码块实例代码块(用的比较少)static…...
基于python下selenium库实现交互式图片保存操作(批量保存浏览器中的图片)
Selenium是最广泛使用的开源Web UI(用户界面)自动化测试套件之一,可以通过编程与浏览量的交互式操作对网页进行自动化控制。基于这种操作进行数据保存操作,尤其是在图像数据的批量保存上占据优势。本博文基于selenium 与jupyterla…...
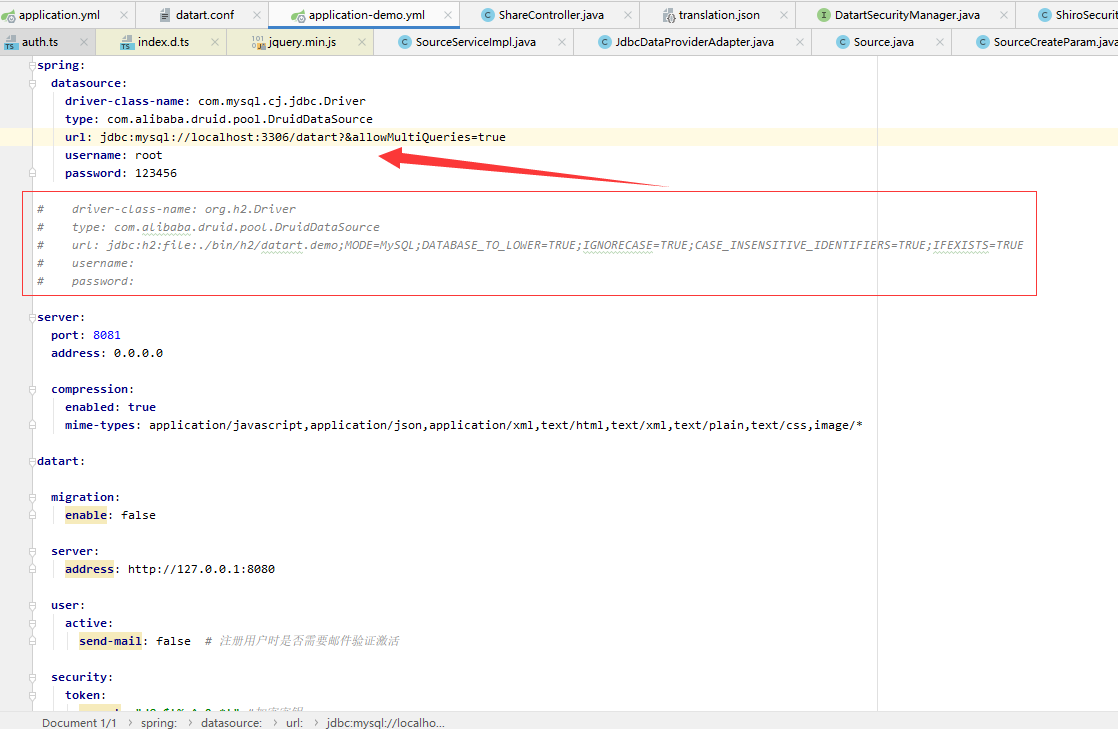
一:Datart的下载、本地运行
前言:本文只是个人在使用datart的一个记录,仅供参考。如果有不一样的地方,欢迎评论或私信进行交流。datart 是新一代数据可视化开放平台,支持各类企业数据可视化场景需求,如创建和使用报表、仪表板和大屏,进…...

Docker-compose
一.Docker-compose概述Docker-Compose项目是Docker官方的开源项目,负责实现对Docker容器集群的快速编排。Docker-Compose将所管理的容器分为三层,分别是 工程(project),服务(service)以及容器&a…...
经典文献阅读之--PLC-LiSLAM(面,线圆柱SLAM)
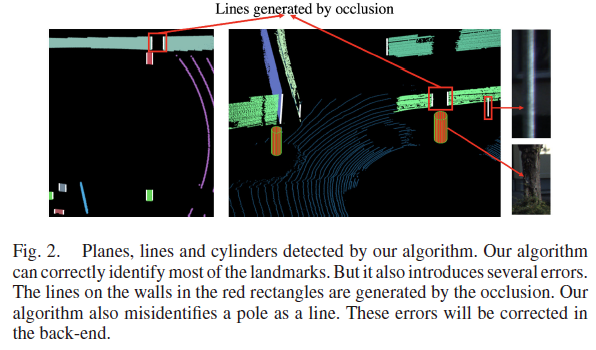
0. 简介 对于激光SLAM来说,现在越来越多的算法不仅仅局限于点线等简答特征的场景了,文章《PLC-LiSLAM: LiDAR SLAM With Planes, Lines,and Cylinders》说到,平面、线段与圆柱体广泛存在于人造环境中。为此作者提出了一个使用这些landmark的…...
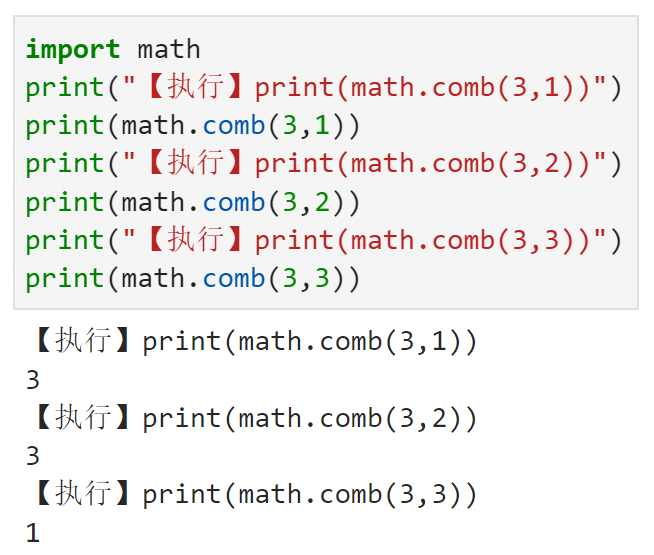
计算组合数Cnk即从n个不同数中选出k个不同数共有多少种方法math.comb(n,k)
【小白从小学Python、C、Java】 【计算机等级考试500强双证书】 【Python-数据分析】 计算组合数Cnk 即从n个不同数中选出k个不同数共有多少种方法 math.comb(n,k) 以下python代码输出结果是? import math print("【执行】print(math.comb(3,1))") print(math.comb(…...

树莓派5本地大模型实时分析SEN6x环境传感器数据实战
1. 项目概述:当环境传感器遇上本地大模型在物联网和边缘计算领域,我们早已习惯了这样的工作流:传感器采集数据,微控制器或单板计算机(比如树莓派)负责收集和上传,最终的数据分析和洞察则交给云端…...

基于Adafruit IO与振动传感器的智能洗衣机提醒器DIY教程
1. 项目概述:告别遗忘,让洗衣机“开口说话”你有没有过这样的经历?把衣服塞进洗衣机,按下启动键,然后转头就去忙别的事情,等再想起来时,已经是好几个小时甚至第二天,湿漉漉的衣服在滚…...

Spoolman:终极3D打印线轴管理解决方案,让您的打印工作更高效 [特殊字符]
Spoolman:终极3D打印线轴管理解决方案,让您的打印工作更高效 🚀 【免费下载链接】Spoolman Keep track of your inventory of 3D-printer filament spools. 项目地址: https://gitcode.com/gh_mirrors/sp/Spoolman Spoolman是一个强大…...

Ardb源码深度解析:从网络层到存储引擎的完整架构设计
Ardb源码深度解析:从网络层到存储引擎的完整架构设计 【免费下载链接】ardb A redis protocol compatible nosql, it support multiple storage engines as backend like Googles LevelDB, Facebooks RocksDB, OpenLDAPs LMDB, PerconaFT, WiredTiger, ForestDB. …...

书匠策AI官网www.shujiangce.com|别再熬夜抠格式了!这个AI工具让期刊论文写起来像“开外挂“
各位还在论文苦海里挣扎的宝子们,我是你们的论文老司机。 今天不聊选题,不聊开题,咱们来聊一个被90%的研究生忽略的神器——书匠策AIhttp://ww 官网直达:www.shujiangce.com里的期刊论文功能。 你是不是也经历过这种崩溃时刻&a…...

深兰科技签约乌兹别克斯坦智慧城市项目,推动中国AI出海规模化
2026年5月11日,深兰人工智能科技(上海)股份有限公司与乌兹别克斯坦合作方在上海张江总部举行签约仪式。双方将围绕乌兹别克斯坦新塔什干新城(Yangi Toshkent)智慧城市建设展开合作,深兰科技通过控股乌兹别克项目公司,围绕智慧城市、智慧住宅、…...

SLAM_TOOLBOX实战:从零到一构建长期可用的2D地图
1. SLAM_TOOLBOX入门:为什么选择它来构建2D地图? 第一次接触SLAM技术时,我被各种开源工具搞得眼花缭乱。直到在真实机器人项目里用了SLAM_TOOLBOX,才发现它简直是长期建图的"瑞士军刀"。这个基于ROS的工具包最打动我的地…...

用操作系统类比彻底搞懂 AI Agent:进程、系统调用与上下文窗口
用操作系统类比彻底搞懂 AI Agent:进程、系统调用与上下文窗口 引言 很多人第一次接触 AI Agent,会立刻被一堆新词包围:Tool Use、Function Calling、RAG、Memory、Orchestrator、Multi-Agent、Context Compression。 这些词看起来很新&#…...

Virtual ZPL Printer:5步搭建专业级条码标签开发测试环境
Virtual ZPL Printer:5步搭建专业级条码标签开发测试环境 【免费下载链接】Virtual-ZPL-Printer An ethernet based virtual Zebra Label Printer that can be used to test applications that produce bar code labels. 项目地址: https://gitcode.com/gh_mirror…...

5大隐藏功能揭秘:Markor如何重塑Android移动文本创作生态
5大隐藏功能揭秘:Markor如何重塑Android移动文本创作生态 【免费下载链接】markor Text editor - Notes & ToDo (for Android) - Markdown, todo.txt, plaintext, math, .. 项目地址: https://gitcode.com/gh_mirrors/ma/markor 在移动设备成为主要生产力…...