《视觉SLAM十四讲》公式推导(三)
文章目录
- CH3-8 证明旋转后的四元数虚部为零,实部为罗德里格斯公式结果
- CH4 李群与李代数
- CH4-1 SO(3) 上的指数映射
- CH4-2 SE(3) 上的指数映射
- CH4-3 李代数求导
- 对极几何:本质矩阵奇异值分解
- 矩阵内积和迹
CH3-8 证明旋转后的四元数虚部为零,实部为罗德里格斯公式结果
前面已经推导过
v ′ = p v p ∗ = p v p − 1 v'=pvp^*=pvp^{-1} v′=pvp∗=pvp−1
其中, v = [ 0 , v ⃗ ] v=[0,\vec{v}] v=[0,v], p = [ cos θ 2 , sin θ 2 u ⃗ ] p=[\cos\frac{\theta}{2},\sin\frac{\theta}{2}\vec{u}] p=[cos2θ,sin2θu],代入上式
v ′ = p v p ∗ = [ cos θ 2 , sin θ 2 u ⃗ ] [ 0 , v ⃗ ] [ cos θ 2 , − sin θ 2 u ⃗ ] = [ 0 − sin θ 2 u ⃗ ⋅ v ⃗ , cos θ 2 v ⃗ + 0 + sin θ 2 u ⃗ × v ⃗ ] [ cos θ 2 , − sin θ 2 u ⃗ ] = [ − sin θ 2 u ⃗ ⋅ v ⃗ , cos θ 2 v ⃗ + sin θ 2 u ⃗ × v ⃗ ] [ cos θ 2 , − sin θ 2 u ⃗ ] (3-8-1) \begin{aligned} v'&=pvp^* \\ &=[\cos\frac{\theta}{2},\sin\frac{\theta}{2}\vec{u}][0,\vec{v}][\cos\frac{\theta}{2},-\sin\frac{\theta}{2}\vec{u}] \\ &=[0-\sin\frac{\theta}{2}\vec{u}\cdot\vec{v},\cos\frac{\theta}{2}\vec{v}+0+\sin\frac{\theta}{2}\vec{u}\times\vec{v}][\cos\frac{\theta}{2},-\sin\frac{\theta}{2}\vec{u}] \\ &=[-\sin\frac{\theta}{2}\vec{u}\cdot\vec{v},\cos\frac{\theta}{2}\vec{v}+\sin\frac{\theta}{2}\vec{u}\times\vec{v}][\cos\frac{\theta}{2},-\sin\frac{\theta}{2}\vec{u}] \end{aligned} \tag{3-8-1} v′=pvp∗=[cos2θ,sin2θu][0,v][cos2θ,−sin2θu]=[0−sin2θu⋅v,cos2θv+0+sin2θu×v][cos2θ,−sin2θu]=[−sin2θu⋅v,cos2θv+sin2θu×v][cos2θ,−sin2θu](3-8-1)
分别计算实部和虚部
R e = − sin θ 2 cos θ 2 u ⃗ ⋅ v ⃗ + ( cos θ 2 v ⃗ + sin θ 2 u ⃗ × v ⃗ ) ⋅ sin θ 2 u ⃗ = − sin θ 2 cos θ 2 u ⃗ ⋅ v ⃗ + cos θ 2 sin θ 2 u ⃗ ⋅ v ⃗ + sin θ 2 ( u ⃗ × v ⃗ ) ⋅ u ⃗ = 0 + 0 = 0 (3-8-2) \begin{aligned} \mathrm{Re}&=-\sin\frac{\theta}{2}\cos\frac{\theta}{2}\vec{u}\cdot\vec{v}+(\cos\frac{\theta}{2}\vec{v}+\sin\frac{\theta}{2}\vec{u}\times\vec{v})\cdot\sin\frac{\theta}{2}\vec{u}\\ &=-\sin\frac{\theta}{2}\cos\frac{\theta}{2}\vec{u}\cdot\vec{v}+\cos\frac{\theta}{2}\sin\frac{\theta}{2}\vec{u}\cdot\vec{v}+\sin\frac{\theta}{2}(\vec{u}\times\vec{v})\cdot\vec{u}\\ &=0+0 \\ &=0 \end{aligned} \tag{3-8-2} Re=−sin2θcos2θu⋅v+(cos2θv+sin2θu×v)⋅sin2θu=−sin2θcos2θu⋅v+cos2θsin2θu⋅v+sin2θ(u×v)⋅u=0+0=0(3-8-2)
I m = ( − sin θ 2 u ⃗ ⋅ v ⃗ ) ⋅ ( − sin θ 2 u ⃗ ) + ( cos θ 2 v ⃗ + sin θ 2 u ⃗ × v ⃗ ) cos θ 2 + ( cos θ 2 v ⃗ + sin θ 2 u ⃗ × v ⃗ ) × ( − sin θ 2 u ⃗ ) (3-8-3) \begin{aligned} \mathrm{Im}&=(-\sin\frac{\theta}{2}\vec{u}\cdot\vec{v})\cdot(-\sin\frac{\theta}{2}\vec{u})+(\cos\frac{\theta}{2}\vec{v}+\sin\frac{\theta}{2}\vec{u}\times\vec{v})\cos\frac{\theta}{2} \\ &+(\cos\frac{\theta}{2}\vec{v}+\sin\frac{\theta}{2}\vec{u}\times\vec{v})\times(-\sin\frac{\theta}{2}\vec{u}) \end{aligned} \tag{3-8-3} Im=(−sin2θu⋅v)⋅(−sin2θu)+(cos2θv+sin2θu×v)cos2θ+(cos2θv+sin2θu×v)×(−sin2θu)(3-8-3)
我们希望将其写成矩阵乘法形式。
先证明公式: a ⃗ × ( b ⃗ × c ⃗ ) = ( a ⃗ ⋅ c ⃗ ) ⋅ b ⃗ − ( a ⃗ ⋅ b ⃗ ) ⋅ c ⃗ \vec{a}\times(\vec{b}\times\vec{c})=(\vec{a}\cdot\vec{c})\cdot\vec{b}-(\vec{a}\cdot\vec{b})\cdot\vec{c} a×(b×c)=(a⋅c)⋅b−(a⋅b)⋅c。
证明:
a ⃗ × b ⃗ = a ∧ b = [ 0 − a 3 a 2 a 3 0 − a 1 − a 2 a 1 0 ] [ b 1 b 2 b 3 ] = △ T a b (3-8-4) \begin{aligned} \vec{a}\times\vec{b}&=\boldsymbol{a}^{\wedge}\boldsymbol{b} \\ &=\left[\begin{array}{c} 0 & -a_3 & a_2 \\ a_3 & 0 & -a_1 \\ -a_2 & a_1 & 0 \end{array}\right]\left[\begin{array}{c} b_1 \\ b_2 \\ b_3 \end{array}\right]\stackrel{\bigtriangleup}=\boldsymbol{T}_a\boldsymbol{b} \end{aligned} \tag{3-8-4} a×b=a∧b= 0a3−a2−a30a1a2−a10 b1b2b3 =△Tab(3-8-4)
那么(矩阵乘法满足结合律)
a ⃗ × ( b ⃗ × c ⃗ ) = ( T a T b ) c = T a T b c \vec{a}\times(\vec{b}\times\vec{c})=(\boldsymbol{T}_a\boldsymbol{T}_b)\boldsymbol{c}=\boldsymbol{T}_a\boldsymbol{T}_b\boldsymbol{c} a×(b×c)=(TaTb)c=TaTbc
而
T a T b = [ 0 − a 3 a 2 a 3 0 − a 1 − a 2 a 1 0 ] [ 0 − b 3 b 2 b 3 0 − b 1 − b 2 b 1 0 ] = [ − a 3 b 3 − a 2 b 2 a 2 b 1 a 3 b 1 a 1 b 2 − a 3 b 3 − a 1 b 1 a 3 b 2 a 1 b 3 a 2 b 3 − a 2 b 2 − a 1 b 1 ] = − ( a ⃗ ⋅ b ⃗ ) I + b a T \begin{aligned} \boldsymbol{T}_a\boldsymbol{T}_b&=\left[\begin{array}{c} 0 & -a_3 & a_2 \\ a_3 & 0 & -a_1 \\ -a_2 & a_1 & 0 \end{array}\right]\left[\begin{array}{c} 0 & -b_3 & b_2 \\ b_3 & 0 & -b_1 \\ -b_2 & b_1 & 0 \end{array}\right] \\ &=\left[\begin{array}{c} -a_3b_3-a_2b_2 & a_2b_1 & a_3b_1 \\ a_1b_2 & -a_3b_3-a_1b_1 & a_3b_2 \\ a_1b_3 & a_2b_3 & -a_2b_2 -a_1b_1 \end{array}\right]\\ &=-(\vec{a}\cdot\vec{b})\boldsymbol{I}+\boldsymbol{b}\boldsymbol{a}^{\mathrm{T}} \end{aligned} TaTb= 0a3−a2−a30a1a2−a10 0b3−b2−b30b1b2−b10 = −a3b3−a2b2a1b2a1b3a2b1−a3b3−a1b1a2b3a3b1a3b2−a2b2−a1b1 =−(a⋅b)I+baT
则(用到了矩阵结合律)
a ⃗ × ( b ⃗ × c ⃗ ) = T a T b c = ( − ( a ⃗ ⋅ b ⃗ ) I + b a T ) c = − ( a ⃗ ⋅ b ⃗ ) c + b ( a T c ) = − ( a ⃗ ⋅ b ⃗ ) c + ( a ⃗ ⋅ c ⃗ ) b (3-8-5) \begin{aligned} \vec{a}\times(\vec{b}\times\vec{c})=\boldsymbol{T}_a\boldsymbol{T}_b\boldsymbol{c}&=(-(\vec{a}\cdot\vec{b})\boldsymbol{I}+\boldsymbol{b}\boldsymbol{a}^{\mathrm{T}})\boldsymbol{c} \\ &=-(\vec{a}\cdot\vec{b})\boldsymbol{c}+\boldsymbol{b}(\boldsymbol{a}^{\mathrm{T}}\boldsymbol{c}) \\ &=-(\vec{a}\cdot\vec{b})\boldsymbol{c}+(\vec{a}\cdot\vec{c})\boldsymbol{b} \end{aligned} \tag{3-8-5} a×(b×c)=TaTbc=(−(a⋅b)I+baT)c=−(a⋅b)c+b(aTc)=−(a⋅b)c+(a⋅c)b(3-8-5)
同理可证
( a ⃗ × b ⃗ ) × c ⃗ = ( a ⃗ ⋅ c ⃗ ) b − ( b ⃗ ⋅ c ⃗ ) a (3-8-6) (\vec{a}\times\vec{b})\times\vec{c}=(\vec{a}\cdot\vec{c})\boldsymbol{b}-(\vec{b}\cdot\vec{c})\boldsymbol{a} \tag{3-8-6} (a×b)×c=(a⋅c)b−(b⋅c)a(3-8-6)
证毕。
下面继续推导式(3-8-3)
I m = sin 2 θ 2 u ⃗ ⋅ v ⃗ ⋅ u ⃗ + cos 2 θ 2 v ⃗ + sin θ 2 cos θ 2 u ⃗ × v ⃗ − sin θ 2 cos θ 2 v ⃗ × u ⃗ − sin 2 θ 2 u ⃗ × v ⃗ × u ⃗ = sin 2 θ 2 ( u ⃗ ⋅ v ⃗ ) ⋅ u ⃗ + cos 2 θ 2 v ⃗ + sin θ u ⃗ × v ⃗ − sin 2 θ 2 [ ( u ⃗ ⋅ u ⃗ ) v − ( v ⃗ ⋅ u ⃗ ) u ] = sin 2 θ 2 ( u ⃗ ⋅ v ⃗ ) ⋅ u ‾ + cos 2 θ 2 v + sin θ u ⃗ × v ⃗ − sin 2 θ 2 v + sin 2 θ 2 ( v ⃗ ⋅ u ⃗ ) u ‾ = cos θ v + 2 sin 2 θ 2 ( v ⃗ ⋅ u ⃗ ) u + sin θ u ⃗ × v ⃗ = cos θ v + ( 1 − cos θ ) ( v ⃗ ⋅ u ⃗ ) u + sin θ u ⃗ × v ⃗ (3-8-7) \begin{aligned} \mathrm{Im}&=\sin^2\frac{\theta}{2}\vec{u}\cdot\vec{v}\cdot\vec{u}+\cos^2\frac{\theta}{2}\vec{v}+\sin\frac{\theta}{2}\cos\frac{\theta}{2}\vec{u}\times\vec{v}-\sin\frac{\theta}{2}\cos\frac{\theta}{2}\vec{v}\times\vec{u}-\sin^2\frac{\theta}{2}\vec{u}\times\vec{v}\times\vec{u} \\ &=\sin^2\frac{\theta}{2}(\vec{u}\cdot\vec{v})\cdot\vec{u}+\cos^2\frac{\theta}{2}\vec{v}+\sin\theta\vec{u}\times\vec{v}-\sin^2\frac{\theta}{2}[(\vec{u}\cdot\vec{u})\boldsymbol{v}-(\vec{v}\cdot\vec{u})\boldsymbol{u}] \\ &=\underline{\sin^2\frac{\theta}{2}(\vec{u}\cdot\vec{v})\cdot\boldsymbol{u}}+\cos^2\frac{\theta}{2}\boldsymbol{v}+\sin\theta\vec{u}\times\vec{v}-\sin^2\frac{\theta}{2}\boldsymbol{v}+\underline{\sin^2\frac{\theta}{2}(\vec{v}\cdot\vec{u})\boldsymbol{u}} \\ &=\cos\theta\boldsymbol{v}+2\sin^2\frac{\theta}{2}(\vec{v}\cdot\vec{u})\boldsymbol{u}+\sin\theta\vec{u}\times\vec{v} \\ &=\cos\theta\boldsymbol{v}+(1-\cos\theta)(\vec{v}\cdot\vec{u})\boldsymbol{u}+\sin\theta\vec{u}\times\vec{v} \end{aligned} \tag{3-8-7} Im=sin22θu⋅v⋅u+cos22θv+sin2θcos2θu×v−sin2θcos2θv×u−sin22θu×v×u=sin22θ(u⋅v)⋅u+cos22θv+sinθu×v−sin22θ[(u⋅u)v−(v⋅u)u]=sin22θ(u⋅v)⋅u+cos22θv+sinθu×v−sin22θv+sin22θ(v⋅u)u=cosθv+2sin22θ(v⋅u)u+sinθu×v=cosθv+(1−cosθ)(v⋅u)u+sinθu×v(3-8-7)
注意: u ⃗ \vec{u} u 是单位向量,故 u ⃗ ⋅ u ⃗ = 1 \vec{u}\cdot\vec{u}=1 u⋅u=1。
也就是拉格朗日公式结果。证毕。
CH4 李群与李代数
CH4-1 SO(3) 上的指数映射
将指数函数 e x e^x ex 在 x = 0 x=0 x=0 处泰勒展开,即
e x = 1 + x + 1 2 ! x 2 + 1 3 ! x 3 + . . . + 1 n ! x n = ∑ n = 0 ∞ x n n ! (4-1-1) \begin{aligned} e^x &= 1+x+\frac{1}{2!}x^2+\frac{1}{3!}x^3+...+\frac{1}{n!}x^n \\ &=\sum_{n=0}^{\infty}\frac{x^n}{n!} \end{aligned} \tag{4-1-1} ex=1+x+2!1x2+3!1x3+...+n!1xn=n=0∑∞n!xn(4-1-1)
将矩阵 A \boldsymbol{A} A 代入上式, 则
e A = ∑ n = 0 ∞ A n n ! e^{\boldsymbol{A}}=\sum_{n=0}^{\infty}\frac{\boldsymbol{A}^n}{n!} eA=n=0∑∞n!An
同样的,也有
e ϕ ∧ = ∑ n = 0 ∞ ( ϕ ∧ ) n n ! (4-1-2) e^{\boldsymbol{\phi}^{\wedge}}=\sum_{n=0}^{\infty}\frac{(\boldsymbol{\phi}^{\wedge})^n}{n!} \tag{4-1-2} eϕ∧=n=0∑∞n!(ϕ∧)n(4-1-2)
令 ϕ = θ a \boldsymbol{\phi}=\theta\boldsymbol{a} ϕ=θa, θ \theta θ为模长, a \boldsymbol{a} a 为单位方向向量。则上式可写为
e ( θ a ) ∧ = ∑ n = 0 ∞ ( θ a ∧ ) n n ! e^{\boldsymbol({\theta\boldsymbol{a}})^{\wedge}}=\sum_{n=0}^{\infty}\frac{(\theta\boldsymbol{a}^{\wedge})^n}{n!} e(θa)∧=n=0∑∞n!(θa∧)n
我们知道
a ∧ = [ 0 − a 3 a 2 a 3 0 − a 1 − a 2 a 1 0 ] \boldsymbol{a}^{\wedge}=\left[\begin{array}{c} 0 & -a_3 & a_2 \\ a_3 & 0 & -a_1 \\ -a_2 & a_1 & 0 \end{array}\right] a∧= 0a3−a2−a30a1a2−a10
则
a ∧ a ∧ = [ 0 − a 3 a 2 a 3 0 − a 1 − a 2 a 1 0 ] [ 0 − a 3 a 2 a 3 0 − a 1 − a 2 a 1 0 ] = [ − a 3 2 − a 2 2 a 1 a 2 a 1 a 3 a 1 a 2 − a 3 2 − a 1 2 a 2 a 3 a 1 a 3 a 2 a 3 − a 2 2 − a 1 2 ] (4-1-3) \begin{aligned} \boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}&=\left[\begin{array}{c} 0 & -a_3 & a_2 \\ a_3 & 0 & -a_1 \\ -a_2 & a_1 & 0 \end{array}\right]\left[\begin{array}{c} 0 & -a_3 & a_2 \\ a_3 & 0 & -a_1 \\ -a_2 & a_1 & 0 \end{array}\right] \\ &=\left[\begin{array}{c} -a_3^2-a_2^2 & a_1a_2 & a_1a_3 \\ a_1a_2 & -a_3^2-a_1^2 & a_2a_3 \\ a_1a_3 & a_2a_3 & -a_2^2-a_1^2 \end{array}\right] \end{aligned} \tag{4-1-3} a∧a∧= 0a3−a2−a30a1a2−a10 0a3−a2−a30a1a2−a10 = −a32−a22a1a2a1a3a1a2−a32−a12a2a3a1a3a2a3−a22−a12 (4-1-3)
因为 a \boldsymbol{a} a 是单位向量,则有 a 1 2 + a 2 2 + a 3 2 = 1 a_1^2+a_2^2+a_3^2=1 a12+a22+a32=1,可得
a a T − I = [ a 1 a 2 a 3 ] [ a 1 a 2 a 3 ] = [ a 1 2 a 1 a 2 a 1 a 3 a 2 a 1 a 2 2 a 2 a 3 a 1 a 3 a 2 a 3 a 3 2 ] − [ 1 0 0 0 1 0 0 0 1 ] = [ − a 3 2 − a 2 2 a 1 a 2 a 1 a 3 a 1 a 2 − a 3 2 − a 1 2 a 2 a 3 a 1 a 3 a 2 a 3 − a 2 2 − a 1 2 ] = a ∧ a ∧ (4-1-4) \begin{aligned} \boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}-\boldsymbol{I}=\left[\begin{array}{c} a_1 \\ a_2 \\ a_3 \end{array}\right]\left[\begin{array}{ccc} a_1 & a_2 & a_3 \end{array}\right] &=\left[\begin{array}{c} a_1^2 & a_1a_2 & a_1a_3 \\ a_2a_1 & a_2^2 & a_2a_3 \\ a_1a_3 & a_2a_3 & a_3^2 \end{array}\right]- \left[\begin{array}{c} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array}\right] \\ &=\left[\begin{array}{c} -a_3^2-a_2^2 & a_1a_2 & a_1a_3 \\ a_1a_2 & -a_3^2-a_1^2 & a_2a_3 \\ a_1a_3 & a_2a_3 & -a_2^2-a_1^2 \end{array}\right] \\ &=\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge} \end{aligned} \tag{4-1-4} aaT−I= a1a2a3 [a1a2a3]= a12a2a1a1a3a1a2a22a2a3a1a3a2a3a32 − 100010001 = −a32−a22a1a2a1a3a1a2−a32−a12a2a3a1a3a2a3−a22−a12 =a∧a∧(4-1-4)
a ∧ a ∧ a ∧ = [ − a 3 2 − a 2 2 a 1 a 2 a 1 a 3 a 1 a 2 − a 3 2 − a 1 2 a 2 a 3 a 1 a 3 a 2 a 3 − a 2 2 − a 1 2 ] [ 0 − a 3 a 2 a 3 0 − a 1 − a 2 a 1 0 ] = [ 0 a 2 2 a 3 + a 3 3 + a 1 2 a 3 − a 2 3 − a 2 a 3 2 − a 1 a 2 2 − a 1 2 a 3 − a 3 3 − a 1 2 a 3 0 a 1 a 2 2 + a 1 3 + a 1 a 3 2 a 2 a 3 2 + a 1 2 a 2 + a 2 3 − a 1 a 3 2 − a 1 3 − a 1 a 2 2 0 ] \begin{aligned} \boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}&=\left[\begin{array}{c} -a_3^2-a_2^2 & a_1a_2 & a_1a_3 \\ a_1a_2 & -a_3^2-a_1^2 & a_2a_3 \\ a_1a_3 & a_2a_3 & -a_2^2-a_1^2 \end{array}\right]\left[\begin{array}{c} 0 & -a_3 & a_2 \\ a_3 & 0 & -a_1 \\ -a_2 & a_1 & 0 \end{array}\right] \\ &=\left[\begin{array}{c} 0 & a_2^2a_3+a_3^3+a_1^2a_3 & -a_2^3-a_2a_3^2-a_1a_2^2 \\ -a_1^2a_3-a_3^3-a_1^2a_3 & 0 & a_1a_2^2+a_1^3+a_1a_3^2 \\ a_2a_3^2+a_1^2a_2+a_2^3 & -a_1a_3^2-a_1^3-a_1a_2^2 & 0 \end{array}\right] \\ \end{aligned} a∧a∧a∧= −a32−a22a1a2a1a3a1a2−a32−a12a2a3a1a3a2a3−a22−a12 0a3−a2−a30a1a2−a10 = 0−a12a3−a33−a12a3a2a32+a12a2+a23a22a3+a33+a12a30−a1a32−a13−a1a22−a23−a2a32−a1a22a1a22+a13+a1a320
又 a 1 2 + a 2 2 + a 3 2 = 1 a_1^2+a_2^2+a_3^2=1 a12+a22+a32=1,上式写为
a ∧ a ∧ a ∧ = [ 0 a 3 − a 2 − a 3 0 a 1 a 2 − a 1 0 ] = − a ∧ (4-1-5) \boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}=\left[\begin{array}{c} 0 & a_3 & -a_2 \\ -a_3 & 0 & a_1 \\ a_2 & -a_1 & 0 \end{array}\right]=-\boldsymbol{a}^{\wedge} \tag{4-1-5} a∧a∧a∧= 0−a3a2a30−a1−a2a10 =−a∧(4-1-5)
对式(4-1-2)
e ϕ ∧ = e ( θ a ) ∧ = ∑ n = 0 ∞ ( θ a ∧ ) n n ! = I + θ a ∧ + 1 2 ! θ 2 a ∧ a ∧ + 1 3 ! θ 3 a ∧ a ∧ a ∧ + 1 4 ! θ 4 a ∧ a ∧ a ∧ a ∧ + . . . = ( a a T − a ∧ a ∧ ) + θ a ∧ + 1 2 ! θ 2 a ∧ a ∧ − 1 3 ! θ 3 a ∧ − 1 4 ! θ 4 a ∧ a ∧ + . . . = a a T + ( θ − 1 3 ! θ 3 + 1 5 ! θ 5 + . . . ) a ∧ + ( − 1 + 1 2 ! θ 2 − 1 4 ! θ 4 + . . . ) a ∧ a ∧ = ( a ∧ a ∧ + I ) + sin θ a ∧ − cos θ ( a ∧ a ∧ ) = ( 1 − cos θ ) a ∧ a ∧ + I + sin θ a ∧ = ( 1 − cos θ ) ( a a T − I ) + I + sin θ a ∧ = a a T − I − cos θ a a T + cos θ I + I + sin θ a ∧ = cos θ I + ( 1 − cos θ ) a a T + sin θ a ∧ \begin{aligned} e^{\boldsymbol{\phi}^{\wedge}}=e^{\boldsymbol({\theta\boldsymbol{a}})^{\wedge}}&=\sum_{n=0}^{\infty}\frac{(\theta\boldsymbol{a}^{\wedge})^n}{n!} \\ &=\boldsymbol{I}+\theta\boldsymbol{a}^{\wedge}+\frac{1}{2!}\theta^2 \boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}+\frac{1}{3!}\theta^3 \boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}+\frac{1}{4!}\theta^4 \boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}+...\\ &=(\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}-\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge})+\theta\boldsymbol{a}^{\wedge}+\frac{1}{2!}\theta^2 \boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}-\frac{1}{3!}\theta^3 \boldsymbol{a}^{\wedge}-\frac{1}{4!}\theta^4 \boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}+...\\ &=\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}+(\theta-\frac{1}{3!}\theta^3+\frac{1}{5!}\theta^5+...)\boldsymbol{a}^{\wedge}+(-1+\frac{1}{2!}\theta^2-\frac{1}{4!}\theta^4+...)\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}\\ &=(\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}+\boldsymbol{I})+\sin\theta \boldsymbol{a}^{\wedge}-\cos\theta(\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge})\\ &=(1-\cos\theta)\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge}+\boldsymbol{I}+\sin\theta \boldsymbol{a}^{\wedge} \\ &=(1-\cos\theta)(\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}-\boldsymbol{I})+\boldsymbol{I}+\sin\theta \boldsymbol{a}^{\wedge}\\ &=\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}-\boldsymbol{I}-\cos\theta\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}+\cos\theta\boldsymbol{I}+\boldsymbol{I}+\sin\theta \boldsymbol{a}^{\wedge}\\ &=\cos\theta\boldsymbol{I}+(1-\cos\theta)\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}+\sin\theta \boldsymbol{a}^{\wedge} \end{aligned} eϕ∧=e(θa)∧=n=0∑∞n!(θa∧)n=I+θa∧+2!1θ2a∧a∧+3!1θ3a∧a∧a∧+4!1θ4a∧a∧a∧a∧+...=(aaT−a∧a∧)+θa∧+2!1θ2a∧a∧−3!1θ3a∧−4!1θ4a∧a∧+...=aaT+(θ−3!1θ3+5!1θ5+...)a∧+(−1+2!1θ2−4!1θ4+...)a∧a∧=(a∧a∧+I)+sinθa∧−cosθ(a∧a∧)=(1−cosθ)a∧a∧+I+sinθa∧=(1−cosθ)(aaT−I)+I+sinθa∧=aaT−I−cosθaaT+cosθI+I+sinθa∧=cosθI+(1−cosθ)aaT+sinθa∧
于是得到李代数 ϕ \boldsymbol{\phi} ϕ 和旋转矩阵 R \boldsymbol{R} R 之间的映射关系,即
R = e ϕ ∧ = cos θ I + ( 1 − cos θ ) a a T + sin θ a ∧ (4-1-6) \boldsymbol{R}=e^{\boldsymbol{\phi}^{\wedge}}=\cos\theta\boldsymbol{I}+(1-\cos\theta)\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}+\sin\theta \boldsymbol{a}^{\wedge} \tag{4-1-6} R=eϕ∧=cosθI+(1−cosθ)aaT+sinθa∧(4-1-6)
也就是 罗德里格斯公式。
CH4-2 SE(3) 上的指数映射
已知李代数 ξ = [ ρ ϕ ] T ∈ R 6 \boldsymbol{\xi}=[\rho \quad \phi]^{\mathrm{T}}\in \boldsymbol{\mathbb{R}}^6 ξ=[ρϕ]T∈R6,它的反对称矩阵为
ξ ∧ = [ ϕ ∧ ρ 0 T 0 ] \boldsymbol{\xi}^{\wedge}=\left[\begin{array}{c} \phi^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right] ξ∧=[ϕ∧0Tρ0]
则李群为
T = exp ( ξ ∧ ) = [ ∑ n = 0 ∞ ( ϕ ∧ ) n n ! ∑ n = 0 ∞ ( ϕ ∧ ) n ( n + 1 ) ! ρ 0 T 0 ] ≜ [ R J ρ 0 T 1 ] (4-2-1) \begin{aligned} \boldsymbol{T}=\exp(\boldsymbol{\xi}^{\wedge})&=\left[\begin{array}{c} \sum_{n=0}^{\infty}\frac{(\boldsymbol{\phi}^{\wedge})^n}{n!} & \sum_{n=0}^{\infty}\frac{(\boldsymbol{\phi}^{\wedge})^n}{(n+1)!}\rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right] \\ &\triangleq \left[\begin{array}{c} \boldsymbol{R} & \boldsymbol{J}\rho \\ \boldsymbol{0}^{\mathrm{T}} & 1 \end{array}\right] \end{aligned} \tag{4-2-1} T=exp(ξ∧)=[∑n=0∞n!(ϕ∧)n0T∑n=0∞(n+1)!(ϕ∧)nρ0]≜[R0TJρ1](4-2-1)
下面开始证明
同样,假设 ϕ = θ a \boldsymbol{\phi}=\theta\boldsymbol{a} ϕ=θa, θ \theta θ为模长, a \boldsymbol{a} a为单位方向向量。将 exp ( ξ ∧ ) \exp(\boldsymbol{\xi}^{\wedge}) exp(ξ∧) 泰勒展开
exp ( ξ ∧ ) = 1 n ! ∑ n = 0 ∞ [ ϕ ∧ ρ 0 T 0 ] n = 1 n ! ∑ n = 0 ∞ [ θ a ∧ ρ 0 T 0 ] n (4-2-2) \exp(\boldsymbol{\xi}^{\wedge})=\frac{1}{n!}\sum_{n=0}^{\infty}\left[\begin{array}{c} \phi^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]^n=\frac{1}{n!}\sum_{n=0}^{\infty}\left[\begin{array}{c} \theta\boldsymbol{a}^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]^n \tag{4-2-2} exp(ξ∧)=n!1n=0∑∞[ϕ∧0Tρ0]n=n!1n=0∑∞[θa∧0Tρ0]n(4-2-2)
当 n = 0 n=0 n=0 时,
1 0 ! [ ϕ ∧ ρ 0 T 0 ] 0 = I \frac{1}{0!}\left[\begin{array}{c} \phi^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]^0=\boldsymbol{I} 0!1[ϕ∧0Tρ0]0=I
当 n = 1 n=1 n=1 时,
1 1 ! [ θ a ∧ ρ 0 T 0 ] 1 = [ θ a ∧ ρ 0 T 0 ] \frac{1}{1!}\left[\begin{array}{c} \theta\boldsymbol{a}^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]^1=\left[\begin{array}{c} \theta\boldsymbol{a}^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right] 1!1[θa∧0Tρ0]1=[θa∧0Tρ0]
当 n = 2 n=2 n=2 时,
1 2 ! [ θ a ∧ ρ 0 T 0 ] [ θ a ∧ ρ 0 T 0 ] = [ ( θ a ∧ ) 2 θ a ∧ ρ 0 T 0 ] \frac{1}{2!}\left[\begin{array}{c} \theta\boldsymbol{a}^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]\left[\begin{array}{c} \theta\boldsymbol{a}^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]=\left[\begin{array}{c} (\theta\boldsymbol{a}^{\wedge})^2 & \theta\boldsymbol{a}^{\wedge}\rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right] 2!1[θa∧0Tρ0][θa∧0Tρ0]=[(θa∧)20Tθa∧ρ0]
当 n = 3 n=3 n=3 时,
1 3 ! [ θ a ∧ ρ 0 T 0 ] [ θ a ∧ ρ 0 T 0 ] [ θ a ∧ ρ 0 T 0 ] = 1 3 ! [ ( θ a ∧ ) 3 ( θ a ∧ ) 2 ρ 0 T 0 ] \frac{1}{3!}\left[\begin{array}{c} \theta\boldsymbol{a}^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]\left[\begin{array}{c} \theta\boldsymbol{a}^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]\left[\begin{array}{c} \theta\boldsymbol{a}^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]=\frac{1}{3!}\left[\begin{array}{c} (\theta\boldsymbol{a}^{\wedge})^3 & (\theta\boldsymbol{a}^{\wedge})^2\rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right] 3!1[θa∧0Tρ0][θa∧0Tρ0][θa∧0Tρ0]=3!1[(θa∧)30T(θa∧)2ρ0]
以此类推
1 n ! [ θ a ∧ ρ 0 T 0 ] n = 1 n ! [ ( θ a ∧ ) n ( θ a ∧ ) n − 1 ρ 0 T 0 ] (4-2-3) \frac{1}{n!}\left[\begin{array}{c} \theta\boldsymbol{a}^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]^n=\frac{1}{n!}\left[\begin{array}{c} (\theta\boldsymbol{a}^{\wedge})^n & (\theta\boldsymbol{a}^{\wedge})^{n-1}\rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right] \tag{4-2-3} n!1[θa∧0Tρ0]n=n!1[(θa∧)n0T(θa∧)n−1ρ0](4-2-3)
那么,式(4-1-8)可化为
exp ( ξ ∧ ) = 1 n ! ∑ n = 0 ∞ [ ϕ ∧ ρ 0 T 0 ] n = I + [ θ a ∧ ρ 0 T 0 ] + [ ( θ a ∧ ) 2 θ a ∧ ρ 0 T 0 ] + . . . + 1 n ! [ ( θ a ∧ ) n ( θ a ∧ ) n − 1 ρ 0 T 0 ] = [ ∑ n = 0 ∞ 1 n ! ( θ a ∧ ) n ∑ n = 0 ∞ 1 ( n + 1 ) ! ( θ a ∧ ) n ρ 0 T 1 ] (4-2-4) \begin{aligned} \exp(\boldsymbol{\xi}^{\wedge})&=\frac{1}{n!}\sum_{n=0}^{\infty}\left[\begin{array}{c} \phi^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]^n \\ &=\boldsymbol{I}+\left[\begin{array}{c} \theta\boldsymbol{a}^{\wedge} & \rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]+\left[\begin{array}{c} (\theta\boldsymbol{a}^{\wedge})^2 & \theta\boldsymbol{a}^{\wedge}\rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]+...+\frac{1}{n!}\left[\begin{array}{c} (\theta\boldsymbol{a}^{\wedge})^n & (\theta\boldsymbol{a}^{\wedge})^{n-1}\rho \\ \boldsymbol{0}^{\mathrm{T}} & 0 \end{array}\right]\\ &=\left[\begin{array}{c} \sum_{n=0}^{\infty}\frac{1}{n!}(\theta\boldsymbol{a}^{\wedge})^n & \sum_{n=0}^{\infty}\frac{1}{(n+1)!}(\theta\boldsymbol{a}^{\wedge})^n\rho \\ \boldsymbol{0}^{\mathrm{T}} & 1 \end{array}\right] \tag{4-2-4} \end{aligned} exp(ξ∧)=n!1n=0∑∞[ϕ∧0Tρ0]n=I+[θa∧0Tρ0]+[(θa∧)20Tθa∧ρ0]+...+n!1[(θa∧)n0T(θa∧)n−1ρ0]=[∑n=0∞n!1(θa∧)n0T∑n=0∞(n+1)!1(θa∧)nρ1](4-2-4)
其中,左上角为 S O ( 3 ) SO(3) SO(3) 指数映射,前面已经证明。令
J = ∑ n = 0 ∞ 1 ( n + 1 ) ! ( θ a ∧ ) n = I + 1 2 ! θ a ∧ + 1 3 ! ( θ a ∧ ) 2 + 1 4 ! ( θ a ∧ ) 3 + 1 5 ! ( θ a ∧ ) 4 = 1 θ ( 1 2 ! θ 2 − 1 4 ! θ 4 + . . . ) a ∧ + 1 θ ( 1 3 ! θ 3 − 1 5 ! θ 5 + . . . ) ( a ∧ ) 2 + I = 1 − cos θ θ a ∧ + θ − sin θ θ ( a ∧ ) 2 + I = 1 − cos θ θ a ∧ + ( 1 − sin θ θ ) ( a a T − I ) + I = 1 − cos θ θ a ∧ + ( 1 − sin θ θ ) a a T − I + sin θ θ I + I = sin θ θ I + ( 1 − sin θ θ ) a a T + 1 − cos θ θ a ∧ (4-2-5) \begin{aligned} \boldsymbol{J}&=\sum_{n=0}^{\infty}\frac{1}{(n+1)!}(\theta\boldsymbol{a}^{\wedge})^n \\ &=\boldsymbol{I}+\frac{1}{2!}\theta\boldsymbol{a}^{\wedge}+\frac{1}{3!}(\theta\boldsymbol{a}^{\wedge})^2+\frac{1}{4!}(\theta\boldsymbol{a}^{\wedge})^3+\frac{1}{5!}(\theta\boldsymbol{a}^{\wedge})^4 \\ &=\frac{1}{\theta}(\frac{1}{2!}\theta^2-\frac{1}{4!}\theta^4+...)\boldsymbol{a}^{\wedge}+\frac{1}{\theta}(\frac{1}{3!}\theta^3-\frac{1}{5!}\theta^5+...)(\boldsymbol{a}^{\wedge})^2+\boldsymbol{I} \\ &=\frac{1-\cos\theta}{\theta}\boldsymbol{a}^{\wedge}+\frac{\theta-\sin\theta}{\theta}(\boldsymbol{a}^{\wedge})^2+\boldsymbol{I}\\ &=\frac{1-\cos\theta}{\theta}\boldsymbol{a}^{\wedge}+(1-\frac{\sin\theta}{\theta})(\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}-\boldsymbol{I})+\boldsymbol{I}\\ &=\frac{1-\cos\theta}{\theta}\boldsymbol{a}^{\wedge}+(1-\frac{\sin\theta}{\theta})\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}-\boldsymbol{I}+\frac{\sin\theta}{\theta}\boldsymbol{I}+\boldsymbol{I}\\ &=\frac{\sin\theta}{\theta}\boldsymbol{I}+(1-\frac{\sin\theta}{\theta})\boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}+\frac{1-\cos\theta}{\theta}\boldsymbol{a}^{\wedge} \tag{4-2-5} \end{aligned} J=n=0∑∞(n+1)!1(θa∧)n=I+2!1θa∧+3!1(θa∧)2+4!1(θa∧)3+5!1(θa∧)4=θ1(2!1θ2−4!1θ4+...)a∧+θ1(3!1θ3−5!1θ5+...)(a∧)2+I=θ1−cosθa∧+θθ−sinθ(a∧)2+I=θ1−cosθa∧+(1−θsinθ)(aaT−I)+I=θ1−cosθa∧+(1−θsinθ)aaT−I+θsinθI+I=θsinθI+(1−θsinθ)aaT+θ1−cosθa∧(4-2-5)
注意,这里用到式(4-1-5) ( a ∧ ) 3 = − a ∧ (\boldsymbol{a}^{\wedge})^3=-\boldsymbol{a}^{\wedge} (a∧)3=−a∧ 和 a a T − I = a ∧ a ∧ \boldsymbol{a}\boldsymbol{a}^{\mathrm{T}}-\boldsymbol{I}=\boldsymbol{a}^{\wedge}\boldsymbol{a}^{\wedge} aaT−I=a∧a∧ 以及泰勒展开
cos θ = 1 − 1 2 ! θ 2 + 1 4 ! θ 4 + . . . \cos\theta=1-\frac{1}{2!}\theta^2+\frac{1}{4!}\theta^4+... cosθ=1−2!1θ2+4!1θ4+...
sin θ = θ − 1 3 ! θ 3 + 1 5 ! θ 5 + . . . \sin\theta=\theta-\frac{1}{3!}\theta^3+\frac{1}{5!}\theta^5+... sinθ=θ−3!1θ3+5!1θ5+...
综上,证毕。
CH4-3 李代数求导
一、(1) S O ( 3 ) \mathrm{SO(3)} SO(3) 直接求导
对极几何:本质矩阵奇异值分解
矩阵内积和迹
矩阵具有 弗罗比尼乌斯内积,类似向量的内积。它被定义为两个相同大小的矩阵 A \boldsymbol{A} A 和 B \boldsymbol{B} B 的对应元素的积的和, 即
< A , B > = ∑ i = 1 n ∑ j = 1 n a i j b i j <\boldsymbol{A},\boldsymbol{B}>=\sum_{i=1}^{n}\sum_{j=1}^na_{ij}b_{ij} <A,B>=i=1∑nj=1∑naijbij
以 3 × 3 3\times 3 3×3 矩阵为例,设
A = [ a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33 ] , B = [ b 11 b 12 b 13 b 21 b 22 b 23 b 31 b 32 b 33 ] \boldsymbol{A}=\left[\begin{array}{c} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{array}\right], \boldsymbol{B}=\left[\begin{array}{c} b_{11} & b_{12} & b_{13} \\ b_{21} & b_{22} & b_{23} \\ b_{31} & b_{32} & b_{33} \end{array}\right] A= a11a21a31a12a22a32a13a23a33 ,B= b11b21b31b12b22b32b13b23b33
则有
< A , B > = ∑ i = 1 n ∑ j = 1 n a i j b i j <\boldsymbol{A},\boldsymbol{B}>=\sum_{i=1}^{n}\sum_{j=1}^na_{ij}b_{ij} <A,B>=i=1∑nj=1∑naijbij
对于 A T B \boldsymbol{A}^{\mathrm{T}}\boldsymbol{B} ATB
A T B = [ a 11 a 21 a 31 a 12 a 22 a 32 a 13 a 23 a 33 ] [ b 11 b 12 b 13 b 21 b 22 b 23 b 31 b 32 b 33 ] = [ a 11 b 11 + a 21 b 21 + a 31 b 31 ? ? ? a 12 b 12 + a 22 b 22 + a 32 b 32 ? ? ? a 13 b 13 + a 23 b 23 + a 33 b 33 ] \boldsymbol{A}^{\mathrm{T}}\boldsymbol{B}=\left[\begin{array}{c} a_{11} & a_{21} & a_{31} \\ a_{12} & a_{22} & a_{32} \\ a_{13} & a_{23} & a_{33} \end{array}\right] \left[\begin{array}{c} b_{11} & b_{12} & b_{13} \\ b_{21} & b_{22} & b_{23} \\ b_{31} & b_{32} & b_{33} \end{array}\right]= \left[\begin{array}{c} a_{11}b_{11}+a_{21}b_{21}+a_{31}b_{31} & ? & ? \\ ? & a_{12}b_{12}+a_{22}b_{22}+a_{32}b_{32} & ? \\ ? & ? & a_{13}b_{13}+a_{23}b_{23}+a_{33}b_{33} \end{array}\right] ATB= a11a12a13a21a22a23a31a32a33 b11b21b31b12b22b32b13b23b33 = a11b11+a21b21+a31b31???a12b12+a22b22+a32b32???a13b13+a23b23+a33b33
则 T r ( A T B ) \mathrm{Tr}(\boldsymbol{A}^{\mathrm{T}}\boldsymbol{B}) Tr(ATB)等于
T r ( A T B ) = a 11 b 11 + a 21 b 21 + a 31 b 31 + a 12 b 12 + a 22 b 22 + a 32 b 32 + a 13 b 13 + a 23 b 23 + a 33 b 33 = ∑ i = 1 n ∑ j = 1 n a i j b i j \mathrm{Tr}(\boldsymbol{A}^{\mathrm{T}}\boldsymbol{B})=a_{11}b_{11}+a_{21}b_{21}+a_{31}b_{31}+a_{12}b_{12}+a_{22}b_{22}+a_{32}b_{32}+a_{13}b_{13}+a_{23}b_{23}+a_{33}b_{33}=\sum_{i=1}^{n}\sum_{j=1}^na_{ij}b_{ij} Tr(ATB)=a11b11+a21b21+a31b31+a12b12+a22b22+a32b32+a13b13+a23b23+a33b33=i=1∑nj=1∑naijbij
也就是说 A T B \boldsymbol{A}^{\mathrm{T}}\boldsymbol{B} ATB 的迹等于两矩阵对应元素相乘的积的和。
相关文章:
)
《视觉SLAM十四讲》公式推导(三)
文章目录 CH3-8 证明旋转后的四元数虚部为零,实部为罗德里格斯公式结果 CH4 李群与李代数CH4-1 SO(3) 上的指数映射CH4-2 SE(3) 上的指数映射CH4-3 李代数求导对极几何:本质矩阵奇异值分解矩阵内积和迹 CH3-8 证明旋转后的四元数虚部为零,实部…...

pnpm、npm、yarn的区别
pnpm、npm、yarn是三种不同的包管理器,它们之间有一些区别。 安装速度:pnpm的安装速度比npm和yarn快,因为它使用了只下载必需的模块,而不是下载整个依赖树。此外,pnpm还可以并行下载模块,从而进一步提高下…...
搞定蓝牙——第四章(GATT协议)
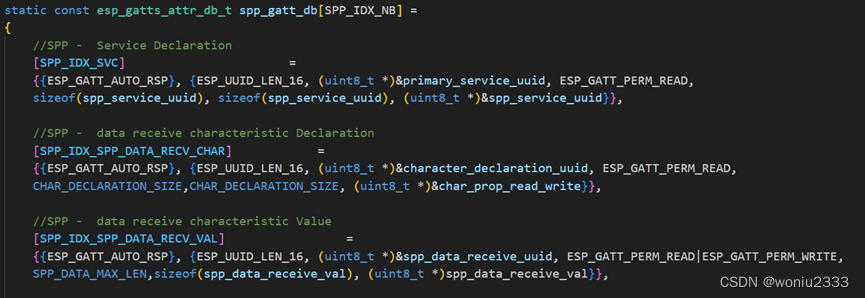
搞定蓝牙——第四章(GATT协议) 原理介绍层次结构server和client端Attribute ESP32代码 文章下面用的英文表示: server和client:服务端和客户端 char.:characteristic缩写,特征 Attribute:属性 ATT:Attribut…...

Go语言入门心法(十四): Go操作Redis实战
Go语言入门心法(一): 基础语法 Go语言入门心法(二): 结构体 Go语言入门心法(三): 接口 Go语言入门心法(四): 异常体系 Go语言入门心法(五): 函数 Go语言入门心法(六): HTTP面向客户端|服务端编程 Go语言入门心法(七): 并发与通道 Go语言入门心法(八): mysql驱动安装报错o…...
)
Java学习笔记(三)
前言 这个主要就是想记录一个点,就是二维数组保存的元素就是一维数组的地址,这个概念大家都知道了,那么接下来就是我最近写程序发生的一个事情了。 随机打乱一个一维数组 这个程序我相信大家都是会写的,通过randomArr来随机打乱…...

Flutter笔记:GetX模块中不使用 Get.put 怎么办
Flutter笔记 GetX模块中不使用 Get.put 怎么办 作者:李俊才 (jcLee95):https://blog.csdn.net/qq_28550263 邮箱 :291148484163.com 本文地址:https://blog.csdn.net/qq_28550263/article/details/13400672…...

2023前端面试整理
1. 介绍一下最近参与的项目,负责那些业务,在开发过程中遇到过问题吗?最后是咋样处理的? 之前负责过大小十几个项目,负责过浙里办的整套上架流程,负责过数据大屏统计,后台管理系统文书生成表单生成等,浙政钉…...

文化融合:TikTok如何弥合跨文化差异
随着全球化的加速和数字媒体的崛起,社交媒体平台已经成为连接世界各地人们的纽带。其中,TikTok作为一个引领者,正在以惊人的速度消除跨文化差异,促进文化融合,使人们更加了解和尊重不同背景和传统。 本文将深入探讨Ti…...

asp.net core获取config和env
配置文件的读取和使用 //读取配置文件直接使用 var configModel configuration.GetSection("DataBaseConfig").Get<DataBaseConfigModel>(); //读取配置文件注入到IOC中 services.Configure<AssemblyConfig>(configuration.GetSection("AssemblyC…...

Git不常用命令(持续更新)
今日鸡汤:当你最满足的时候,通常也最孤独;当你最愤慨的时候,通常也最可怜。 此博文会列出一些平时不常用,但是能提高效率的git命令,后续会出IDEA对应的操作步骤 快看看你是不是都用过... 分支(…...

PostPreSql 数据库的一些用法
1、varchar 类型转换成数字 select sum(CAST(order_num AS NUMERIC)) from ads_port_cli_cons_freq_rpt where yr2023 and mon 08...
小工具推荐:FastGithub的下载及使用
前言:FastGithub是基于dotnet开发的一款开源Github加速器,通过自动获取与GitHub相关的IP地址并更新本地hosts文件来提高资源访问速度,使GitHub的访问畅通无阻。原理(复制过来的): ①修改本机的DNS服务指向…...
硬件信息查看工具 EtreCheckpro mac中文版功能介绍
etrecheckpro mac中文版是一款专业的硬件信息查看工具,它能够快速的检测Mac电脑的软硬件信息,加强用户对自己计算机的了解,EtreCheckPro for Mac下载首先会对电脑的软硬件信息进行扫描收集,之后才会显示出来。EtreCheck Mac版报告…...

宝塔Python3.7安装模块报错ModuleNotFoundError: No module named ‘Crypto‘解决办法
前言 今晚遇到一个问题,宝塔服务器上安装脚本的模块时,出现以下报错,这里找到了解决办法 Traceback (most recent call last):File "/www/wwwroot/unifysign/fuck_chaoxing/fuck_xxt.py", line 4, in <module>from Crypto.…...
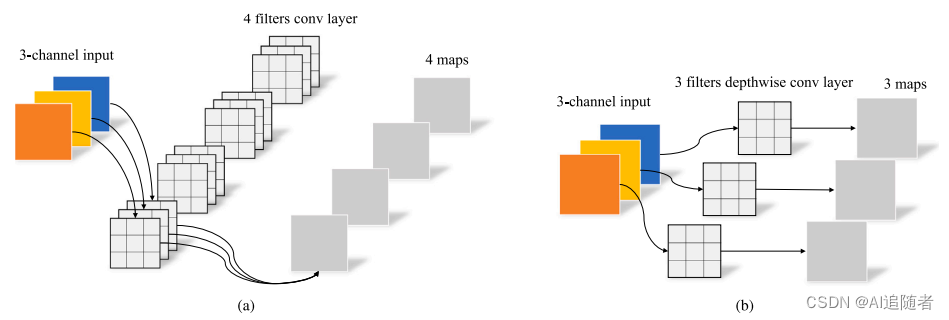
优化改进YOLOv5算法:加入ODConv+ConvNeXt提升小目标检测能力——(超详细)
为了提升无人机视角下目标检测效果,基于YOLOv5算法,在YOLOv5主干中实现了Omnidimensional Convolution(ODConv),以在不增加网络宽度和深度的情况下提高精度,还在YOLOv5骨干网中用ConvNeXt块替换了原始的C3块,以加快检测速度。 1 Omni-dimensional dynamic convolution …...

ElasticSearch安装、插件介绍及Kibana的安装与使用详解
ElasticSearch安装、插件介绍及Kibana的安装与使用详解 1.安装 ElasticSearch 1.1 安装 JDK 环境 因为 ElasticSearch 是用 Java 语言编写的,所以必须安装 JDK 的环境,并且是 JDK 1.8 以上,具体操作步骤自行百度 安装完成查看 java 版本 …...
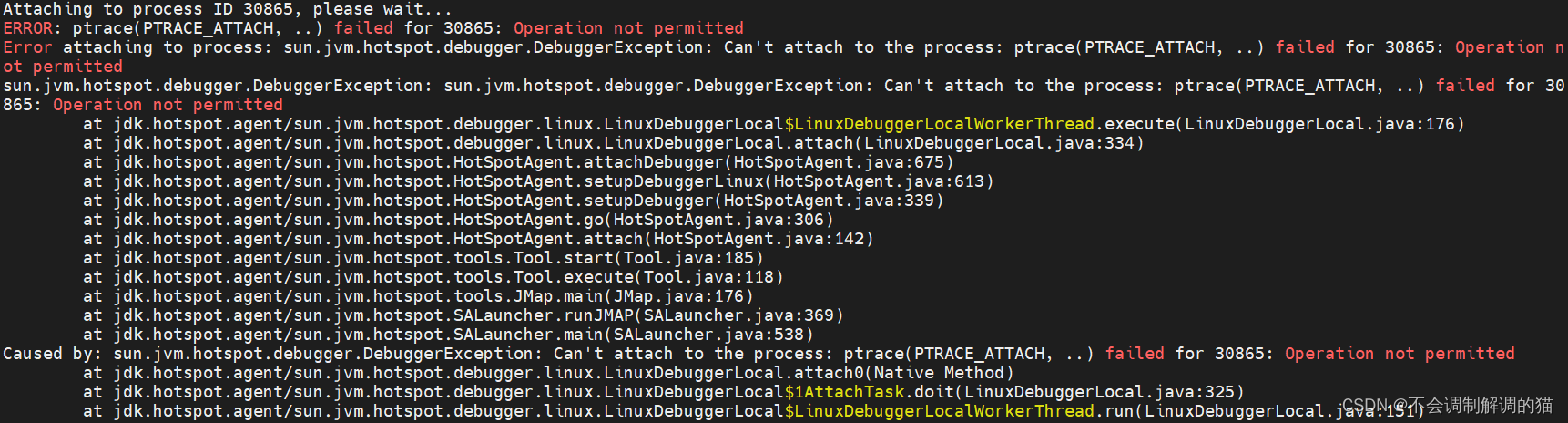
JVM | 命令行诊断与调优 jhsdb jmap jstat jps
目录 jmap 查看堆使用情况 查看类列表,包含实例数、占用内存大小 生成jvm的堆转储快照dump文件 jstat 查看gc的信息,查看gc的次数,及时间 查看VM内存中三代(young/old/perm)对象的使用和占用大小 查看元数据空…...

SQL 表达式
SQL 表达式 表达式是计算值的一个或多个值、运算符和SQL函数的组合。这些SQL表达式类似于公式,它们是用查询语言编写的。 您还可以使用它们查询数据库中的特定数据集。 句法 考虑SELECT语句的基本语法,如下所示: SELECT column1, column2, …...
Unity3D 打包发布时生成文件到打包目录
有时候需要自己创建批处理文件或日志文件,在启动程序的同级目录使用,减少手动操作的时间和错误率。主要使用到的是OnPostprocessBuild方法。 1、在工程中的Editor文件夹下创建脚本 2、将文件放入Plugins的相关目录 3.脚本内容 using System.Collection…...

Elasticsearch中使用join来进行父子关联
在使用关系数据库进行开发的过程中,你可能会经常使用外键来表示父表和子表之间的关联关系,在Elasticsearch中,有哪些方法可以用来让开发者解决索引之间一对多和多对多的关联关系的问题呢 1 使用对象数组存在的问题 你可以很方便地把一个对象…...
)
CCS12.2搭配C2000ware 4.03导入工程报错?手把手教你修复头文件路径变量(MATLAB 2023b适用)
CCS12.2与C2000ware 4.03工程导入报错全解析:从路径变量修复到MATLAB 2023b联调实战 当你满怀期待地将MATLAB 2023b生成的代码导入CCS12.2,准备与C2000ware 4.03来场完美邂逅时,编译器却毫不留情地抛出一连串头文件找不到的错误——这种从云端…...

如何评估Android测试自动化成熟度:从入门到精通的完整指南
如何评估Android测试自动化成熟度:从入门到精通的完整指南 【免费下载链接】testing-samples A collection of samples demonstrating different frameworks and techniques for automated testing 项目地址: https://gitcode.com/gh_mirrors/te/testing-samples …...

实战演练:用nli-distilroberta-base构建智能问答系统的推理模块
实战演练:用nli-distilroberta-base构建智能问答系统的推理模块 1. 项目概述与核心价值 自然语言推理(NLI)是构建智能问答系统的核心技术之一,它能够判断两个句子之间的逻辑关系。nli-distilroberta-base镜像基于轻量级的DistilRoBERTa模型,…...

OpenClaw极简安装:Docker版Qwen3-32B镜像五分钟部署
OpenClaw极简安装:Docker版Qwen3-32B镜像五分钟部署 1. 为什么选择Docker部署OpenClaw 上周我在本地尝试手动部署OpenClaw时,被各种依赖冲突折磨得够呛。从Node.js版本不兼容到CUDA驱动问题,整整浪费了两天时间。直到发现星图平台的Qwen3-3…...

OpenClaw自动化测试进阶:Phi-3-vision-128k验证APP多语言界面一致性
OpenClaw自动化测试进阶:Phi-3-vision-128k验证APP多语言界面一致性 1. 为什么需要自动化多语言测试 作为独立开发者,去年我发布了一款工具类APP到国际市场。当用户基数突破1万时,收到了30多条关于德语界面错译的差评——某个按钮的"取…...

Python 日志神器 Loguru 超详细使用教程
前言 在 Python 开发中,日志记录是排查问题、监控程序运行的核心工具,但原生 logging 库配置繁琐、语法复杂,新手很难快速上手。Loguru 是一款极简、强大、开箱即用的第三方日志库,无需复杂配置,一行代码就能实现专业级…...

Windows下OpenClaw安装指南:一键对接Phi-3-mini-128k-instruct模型
Windows下OpenClaw安装指南:一键对接Phi-3-mini-128k-instruct模型 1. 为什么选择OpenClawPhi-3-mini组合? 去年我在尝试自动化办公流程时,发现市面上的RPA工具要么太笨重,要么需要复杂的编程。直到遇到OpenClaw这个开源智能体框…...

Jasny Bootstrap按钮标签组件详解:如何优雅地添加图标标签
Jasny Bootstrap按钮标签组件详解:如何优雅地添加图标标签 【免费下载链接】bootstrap The missing components for your favorite front-end framework. 项目地址: https://gitcode.com/gh_mirrors/boots/bootstrap Jasny Bootstrap作为Bootstrap的扩展组件…...

seL4微内核技术演进:下一代安全内核的完整发展路线图指南
seL4微内核技术演进:下一代安全内核的完整发展路线图指南 【免费下载链接】seL4 The seL4 microkernel 项目地址: https://gitcode.com/gh_mirrors/se/seL4 seL4微内核作为全球首个形式化验证的安全操作系统内核,正引领着安全关键系统的发展方向。…...

ZYNQ AXI_DMA配置避坑指南:如何避免DDR3数据传输中的栈区溢出
ZYNQ AXI_DMA配置避坑指南:如何避免DDR3数据传输中的栈区溢出 在嵌入式系统开发中,内存管理往往是决定项目成败的关键因素之一。最近接手一个ZYNQ项目时,我遇到了一个令人头疼的问题:当使用AXI_DMA从PL端向PS端的DDR3内存传输大量…...