【计算机视觉】对极几何

文章目录
- 一、极线约束(Epipolar Constraint)
- 二、相机标定过的情况
- 三、相机没有标定过的情况
- 四、八点算法(eight-point algorithm)
我的《计算机视觉》系列参考UC Berkeley的CS180课程,PPT可以在课程主页看到。
在上一篇文章3D视觉中我们介绍了在两个照相机像平面共面的情况下如何计算深度:深度与景物在图片中的位移成反比。这篇文章我们讨论更一般的情形,像平面不必共面,甚至不必平行。假设两个相机的内参(intrinsics)都是标定(calibrate)过的。
一、极线约束(Epipolar Constraint)
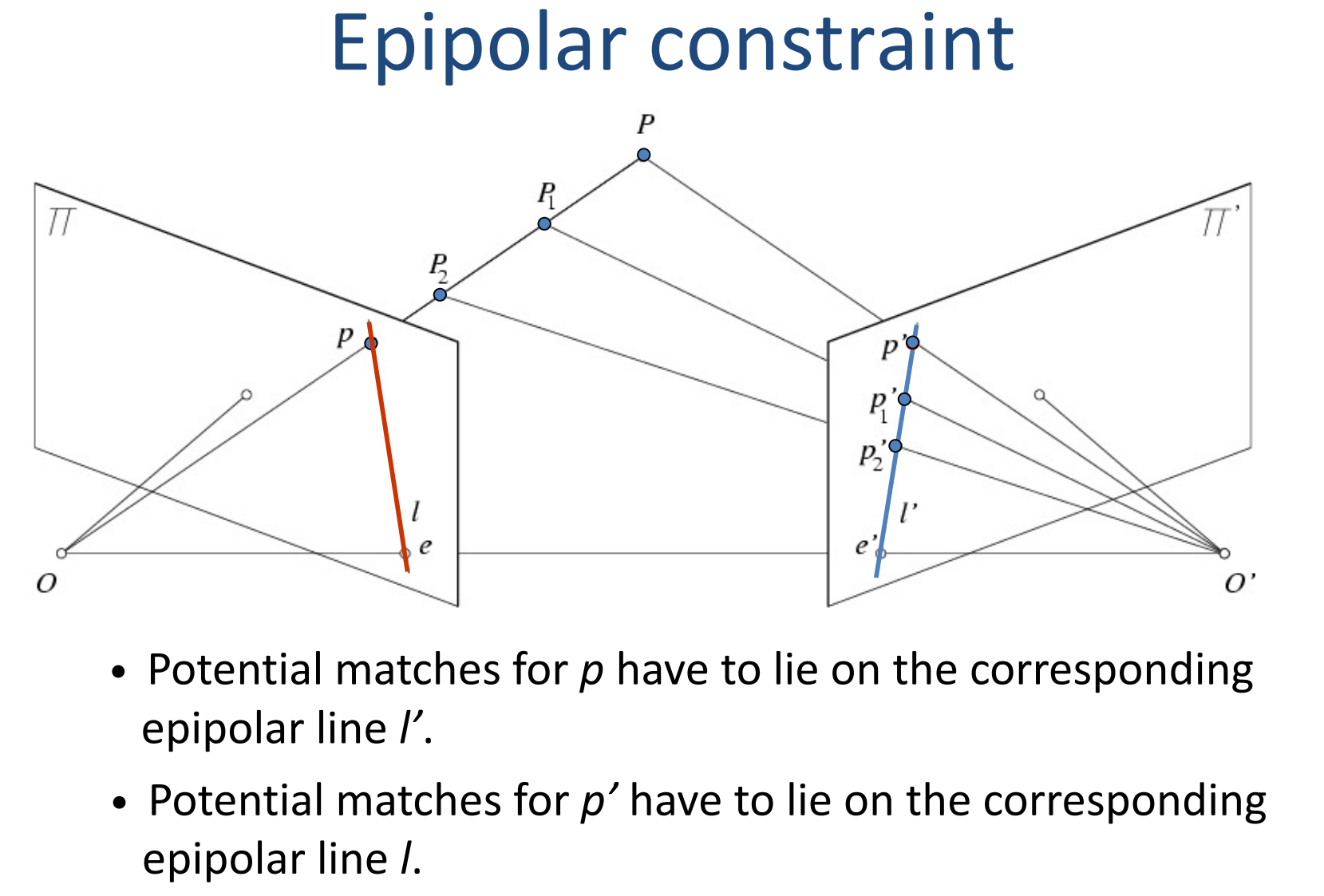
设两个相机的投影中心分别为 O O O和 O ′ O' O′(回想一下投影中心其实可以理解为所有光线都汇聚到的点),两个像平面分别为 Π \Pi Π和 Π ′ \Pi' Π′。设景物在 P P P点, O P OP OP与 Π \Pi Π交于点 p p p,这个 p p p就是景物在像平面 Π \Pi Π上的对应点。知道了 p p p在第一张照片上的坐标,就知道了景物所在的直线——图中的 O P OP OP。现在我们需要在第二张照片上找到景物对应的点。在哪儿找呢?上一篇文章我们讨论的情况中景物一定会出现在一条水平线上。在我们现在讨论的一般情况下,它还是出现在一条直线上吗?答案是肯定的。因为,任取 O P OP OP上的点 P 1 , P 2 , ⋯ P_1,P_2,\cdots P1,P2,⋯,令 O ′ P i O'P_i O′Pi与 Π ′ \Pi' Π′交于 p i ′ p_i' pi′, p i ′ p_i' pi′就是假设景物在 P i P_i Pi点时 其对应于第二张照片上的点。还是那个套路,我们知道 O P i OP_i OPi一定在 由 O P OP OP和 O O ′ OO' OO′确定的平面 O O ′ P OO'P OO′P上,那么 P i P_i Pi在第二张图片上的对应点 p i ′ p_i' pi′也一定在 平面 O O ′ P OO'P OO′P上;而 p ′ p' p′又在平面 Π ′ \Pi' Π′上,所以 p ′ p' p′一定在平面 Π ′ \Pi' Π′和平面 O O P ′ OOP' OOP′的交线上(图中的 l ′ l' l′)。所以,我们寻找 P P P在第二张图片上的对应点时只需要在直线 l ′ l' l′上寻找即可。直线 l l l和 l ′ l' l′称为极线(epipolar lines)。
但我们怎么知道极线 l ′ l' l′在哪里呢?两点确定一条直线,找到 l ′ l' l′上的两个点目前还有些困难,不过找到一个点是可以的。注意到, O O O点也在极线 O P OP OP上,而相机的内参是知道的,也就是说我们知道 O O O点的坐标(相对于 O ′ O' O′而言), O O ′ OO' OO′与 Π ′ \Pi' Π′的交点 e ′ e' e′一定在极线 l ′ l' l′上。 e ′ e' e′连同 O O ′ OO' OO′与 Π \Pi Π的交点 e e e被称为对极点(epipoles);其实就是一个相机看到另一个相机在图片中的位置,它不一定在图片上。当两个相机的像平面共面时,对极点 e e e和 e ′ e' e′就在无穷远处。 O O ′ OO' OO′称为摄影基线(baseline)。包含 O O ′ OO' OO′的所有平面称为极平面(epipolar plane),它绕着 O O ′ OO' OO′旋转;极平面和像平面的交点就是极线,它也绕着 O O ′ OO' OO′旋转。
二、相机标定过的情况
想要找到 l ′ l' l′上的另一个点其实是不可能的——没有另一个点可以找。但是,注意我们的相机是标定过的,我们知道两个相机之间的坐标变换。令点 p p p在第一个相机坐标系下的坐标为 x \boldsymbol{x} x,即 O P → = x \overrightarrow{OP}=\boldsymbol{x} OP=x,再令点 p ′ p' p′在第二个相机坐标系下的坐标为 x ′ \boldsymbol{x}' x′。现在我们在第二个相机坐标系(即 O ′ O' O′坐标系)下讨论问题。向量 x \boldsymbol{x} x就不能直接使用了,需要转换到 O ′ O' O′坐标系: x O = R x + t \boldsymbol{x}_O=R\boldsymbol{x}+\boldsymbol{t} xO=Rx+t,其中 R R R是旋转矩阵, t = O O ′ → \boldsymbol{t}=\overrightarrow{OO'} t=OO′是平移向量。我们还知道, x , x ′ , t \boldsymbol{x},\boldsymbol{x}',\boldsymbol{t} x,x′,t是共面的,即 x ′ ⋅ ( t × x O ) = 0 \boldsymbol{x}'\cdot(\boldsymbol{t}\times\boldsymbol{x}_O)=0 x′⋅(t×xO)=0其中 t × x \boldsymbol{t}\times\boldsymbol{x} t×x是极平面的法向量, x ′ \boldsymbol{x}' x′与其点积为 0 0 0说明与其垂直,进而说明 x ′ \boldsymbol{x}' x′在极平面上。化简: t × x O = t × ( R x + t ) = t × R x + x × t = t × R x + 0 = t × R x \boldsymbol{t}\times\boldsymbol{x}_O=\boldsymbol{t}\times (R\boldsymbol{x}+\boldsymbol{t})=\boldsymbol{t}\times R\boldsymbol{x}+\boldsymbol{x}\times \boldsymbol{t}=\boldsymbol{t}\times R\boldsymbol{x}+\boldsymbol{0}=\boldsymbol{t}\times R\boldsymbol{x} t×xO=t×(Rx+t)=t×Rx+x×t=t×Rx+0=t×Rx因此有 x ′ ⋅ ( t × R x ) = 0 \boldsymbol{x}'\cdot(\boldsymbol{t}\times R\boldsymbol{x})=0 x′⋅(t×Rx)=0叉乘可以转化成与一个反对称矩阵 [ t × ] [\boldsymbol{t}_\times] [t×]的乘法:
故等式化为 x ′ T [ t × ] R x = 0 \boldsymbol{x}'^T[\boldsymbol{t}_\times]R\boldsymbol{x}=0 x′T[t×]Rx=0。令 E = [ t × ] R E=[\boldsymbol{t}_\times]R E=[t×]R,则有 x ′ T E x = 0 \boldsymbol{x}'^TE\boldsymbol{x}=0 x′TEx=0这就是Longuet-Higgins方程。 E E E被称为本质矩阵(Essential Matrix)。
其实, E x E\boldsymbol{x} Ex就表示极线 l ′ l' l′。设 l ′ l' l′在像平面上的方程为 a x ′ + b y ′ + c = 0 ax'+by'+c=0 ax′+by′+c=0,即 [ a , b , c ] [ x ′ , y ′ , 1 ] T = 0 [a,b,c][x',y',1]^T=0 [a,b,c][x′,y′,1]T=0。注意像平面 Π ′ \Pi' Π′的法向量和 O ′ O' O′坐标系下的 z z z轴平行(即 Π ′ \Pi' Π′与 x ′ O y ′ x'Oy' x′Oy′面平行),所以 x ′ , y ′ x',y' x′,y′既是 O ′ O' O′坐标系下的横纵坐标,也是像平面坐标系下的横纵坐标。那么 a , b , c a,b,c a,b,c就可以用 E x E\boldsymbol{x} Ex来确定了。
最后, E E E是奇异矩阵,秩为 2 2 2,有五个自由度:3个平移,2个旋转(平面绕法线旋转等于没旋转,所以少一个旋转自由度)。
三、相机没有标定过的情况
设图像上的坐标为 ( u , v ) (u,v) (u,v),令 x ^ = [ u , v , 1 ] T \hat{\boldsymbol{x}}=[u,v,1]^T x^=[u,v,1]T。令 K K K和 K ′ K' K′分别是连哥哥相机的 3 × 3 3\times 3 3×3版本的内参矩阵(intrinsic matrix),则 x = K − 1 x ^ \boldsymbol{x}=K^{-1}\hat{\boldsymbol{x}} x=K−1x^, x ′ = K ′ − 1 x ^ ′ \boldsymbol{x}'=K'^{-1}\hat{\boldsymbol{x}}' x′=K′−1x^′,代入 x ′ T E x = 0 \boldsymbol{x}'^TE\boldsymbol{x}=0 x′TEx=0得 x ^ ′ T ( K ′ − 1 ) T E K − 1 ⏟ F x ^ = 0 \hat{\boldsymbol{x}}'^T\underset{F}{\underbrace{{(K'^{-1})}^TEK^{-1}}}\hat{\boldsymbol{x}}=0 x^′TF (K′−1)TEK−1x^=0其中 F = ( K ′ − 1 ) T E K − 1 F={(K'^{-1})}^TEK^{-1} F=(K′−1)TEK−1称为基础矩阵(Fundamental Matrix)。它也是秩为2的矩阵,有7个自由度:秩为2相当于多一个方程,损失一个自由度;把 F F F放大若干倍等式不变,再损失一个自由度。
四、八点算法(eight-point algorithm)
如何求得基础矩阵 F F F呢?还是老套路,线性回归。给定两张图片上的8个点对,代入方程 x ^ ′ T F x ^ = 0 \hat{\boldsymbol{x}}'^T F\hat{\boldsymbol{x}}=0 x^′TFx^=0用最小二乘法求得最优的 F F F即可。
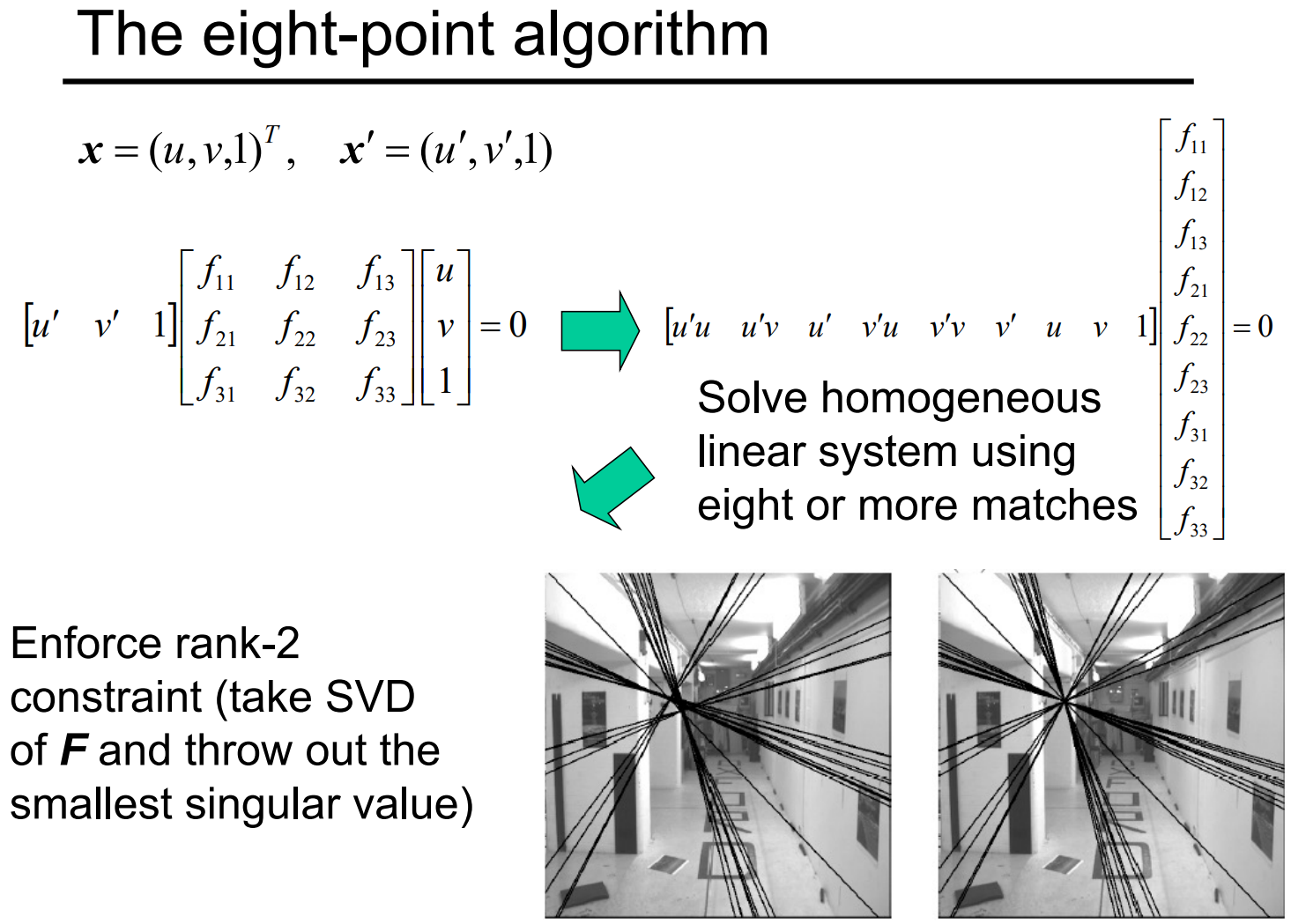
用 8 8 8个点是利用到了秩为 2 2 2的约束,少了一个自由度;另外一个缺失的自由度没必要利用,因为没必要手动确定 F F F的缩放大小。实践中应该用多于 8 8 8个点。
最后,如果我们标定了相机,那么就可以从 F F F求得 E E E;而 E E E又可以进行奇异值分解最终还原 R R R和 t \boldsymbol{t} t。过程比较复杂,可以参考https://inst.eecs.berkeley.edu/~ee290t/fa19/lectures/lecture10-3-decomposing-F-matrix-into-Rotation-and-Translation.pdf。
相关文章:
【计算机视觉】对极几何
文章目录 一、极线约束(Epipolar Constraint)二、相机标定过的情况三、相机没有标定过的情况四、八点算法(eight-point algorithm) 我的《计算机视觉》系列参考UC Berkeley的CS180课程,PPT可以在课程主页看到。 在上一…...
强大易于编辑的流程图组织图绘制工具draw.io Mac苹果中文版
draw.io可以绘制多种类型的图表,包括但不限于流程图、组织结构图、网络图、UML图、电气工程图等。draw.io提供了丰富的图形元素和编辑功能,使用户能够轻松地创建和编辑各种复杂的图表。同时,该软件还支持多种导出格式,方便用户在不…...
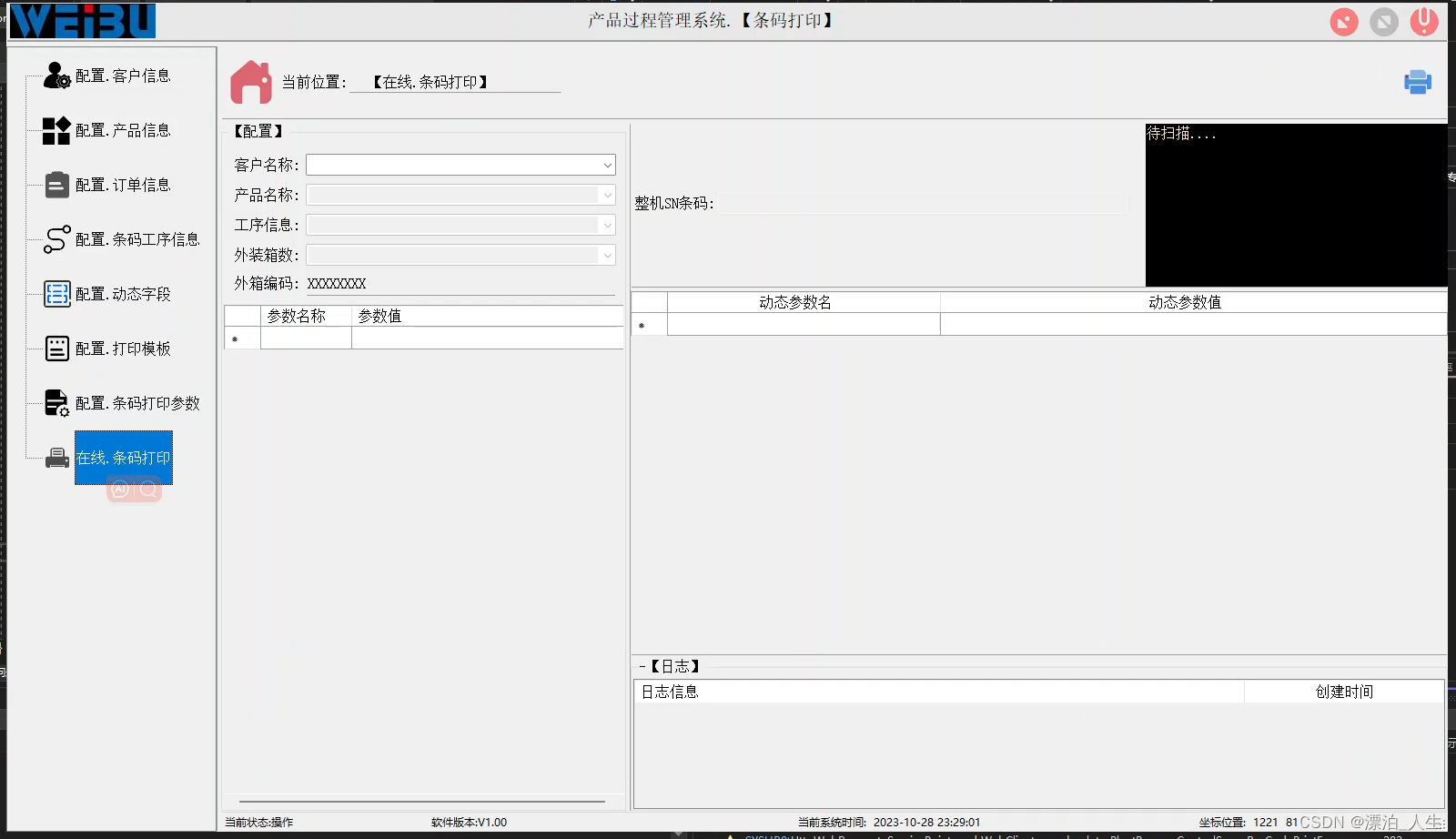
c# .net6 在线条码打印基于
条码打印基于:BarTender、ORM EF架构 UI展示: 主页代码: using NPOI.OpenXmlFormats.Spreadsheet; using ServerSide.Models; using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawi…...

Hive SQL的编译过程
1.MapReduce实现基本SQL操作的原理 详细讲解SQL编译为MapReduce之前,我们先来看看MapReduce框架实现SQL基本操作的原理 1.1 Join的实现原理 select u.name, o.orderid from order o join user u on o.uid = u.uid; 在map的输出value中为不同表的数据打上tag标记,在reduce阶段…...
[架构之路-245/创业之路-76]:目标系统 - 纵向分层 - 企业信息化的呈现形态:常见企业信息化软件系统 - 企业资源管理计划ERP
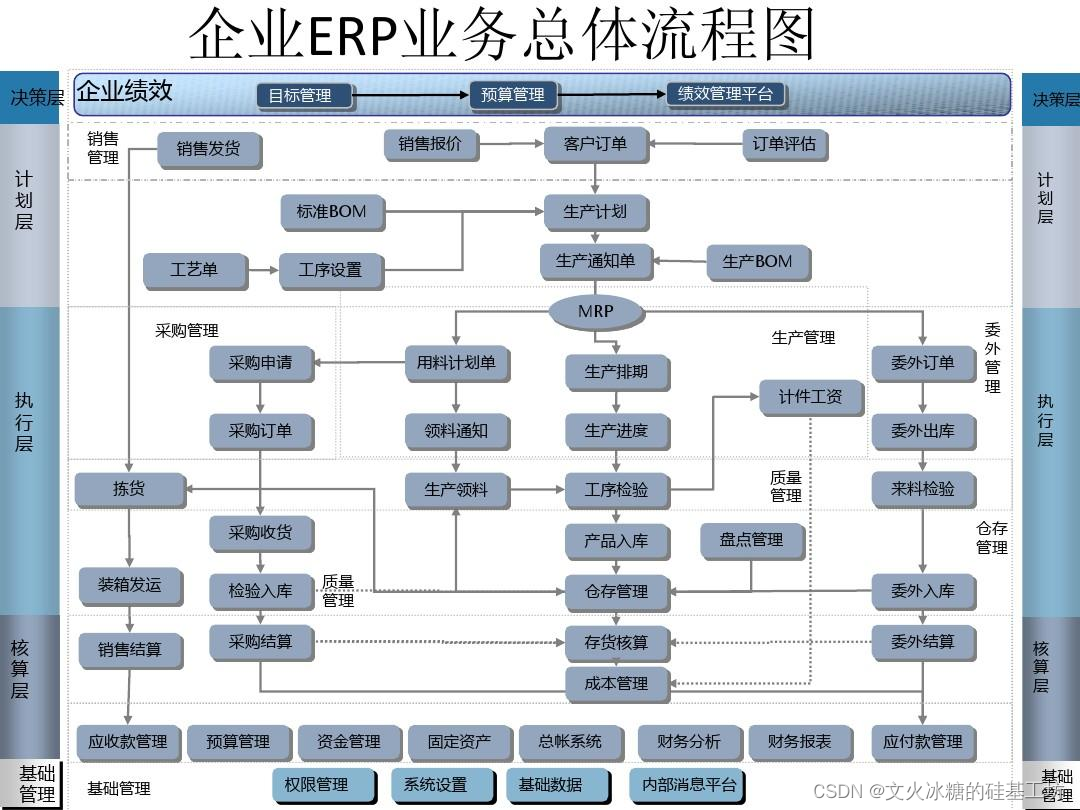
目录 前言: 一、企业信息化的结果:常见企业信息化软件 1.1 企业资源管理计划 1.1.1 什么是ERP:企业最常用的信息管理系统 1.1.2 ERP的演进过程 1.1.3 EPR模块 1.1.4 EPR五个层级 1.1.5 企业EPR业务总体流程图 1.1.6 什么类型的企业需…...
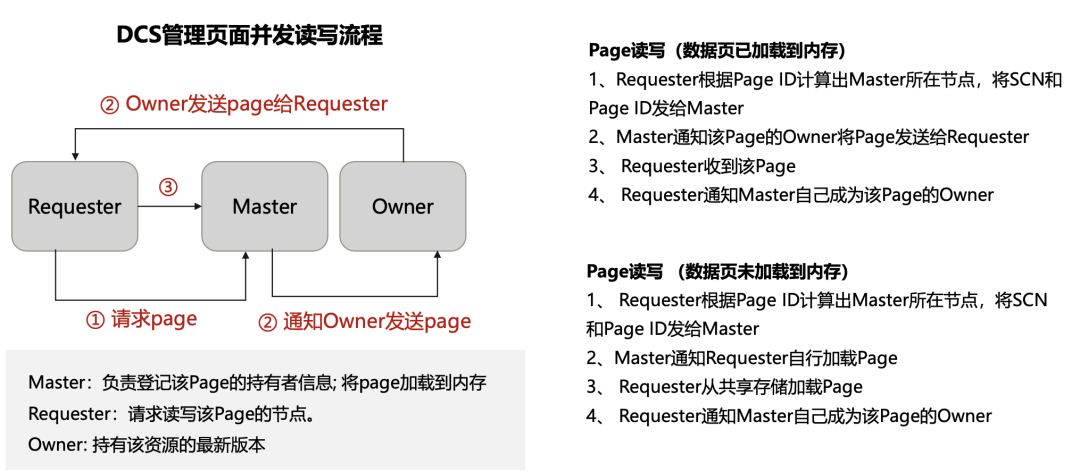
数据库简史:多主数据库架构的由来和华为参天引擎的机遇
注:本文发表后,收到了很多后台反馈,其中关于大型机的早期成就不容省略。微调重发本文,纯属个人观点,错谬之处,仍然期待指正。 2023年10月13日,在北京举办的“2023金融业数据库技术大会"上&…...
C语言每日一练(二)
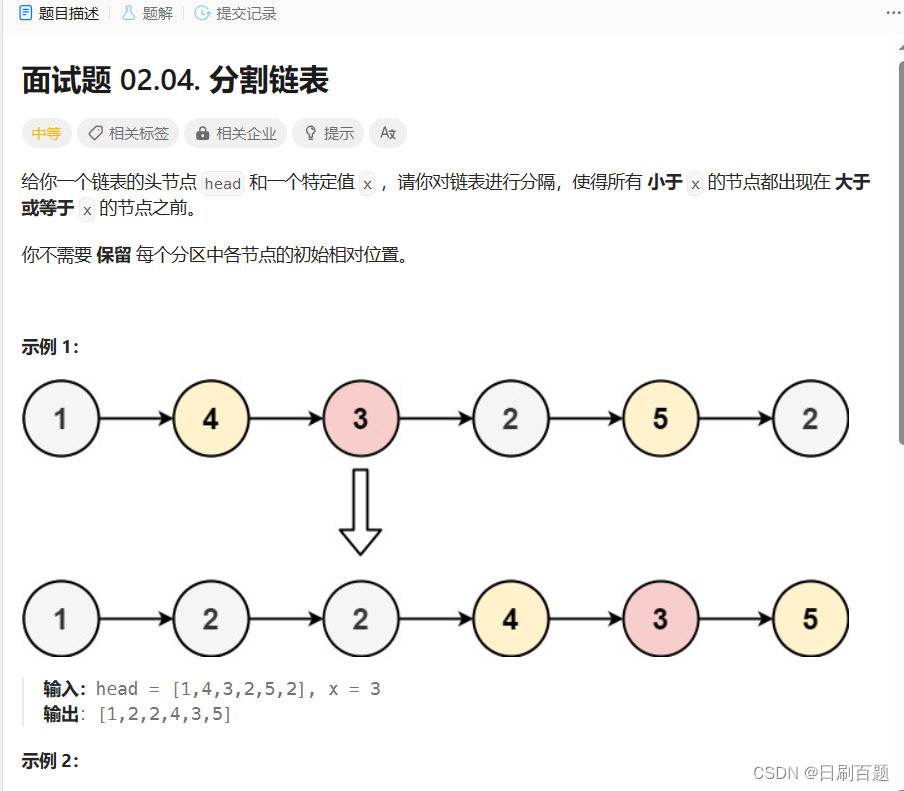
单链表经典算法专题 一、 单链表相关经典算法OJ题1:移除链表元素 解法一:在原链表中删除Node.nextnext的节点 typedef struct ListNode ListNode; struct ListNode* removeElements( ListNode* head, int val) {ListNode* pcur head;ListNode* pre h…...
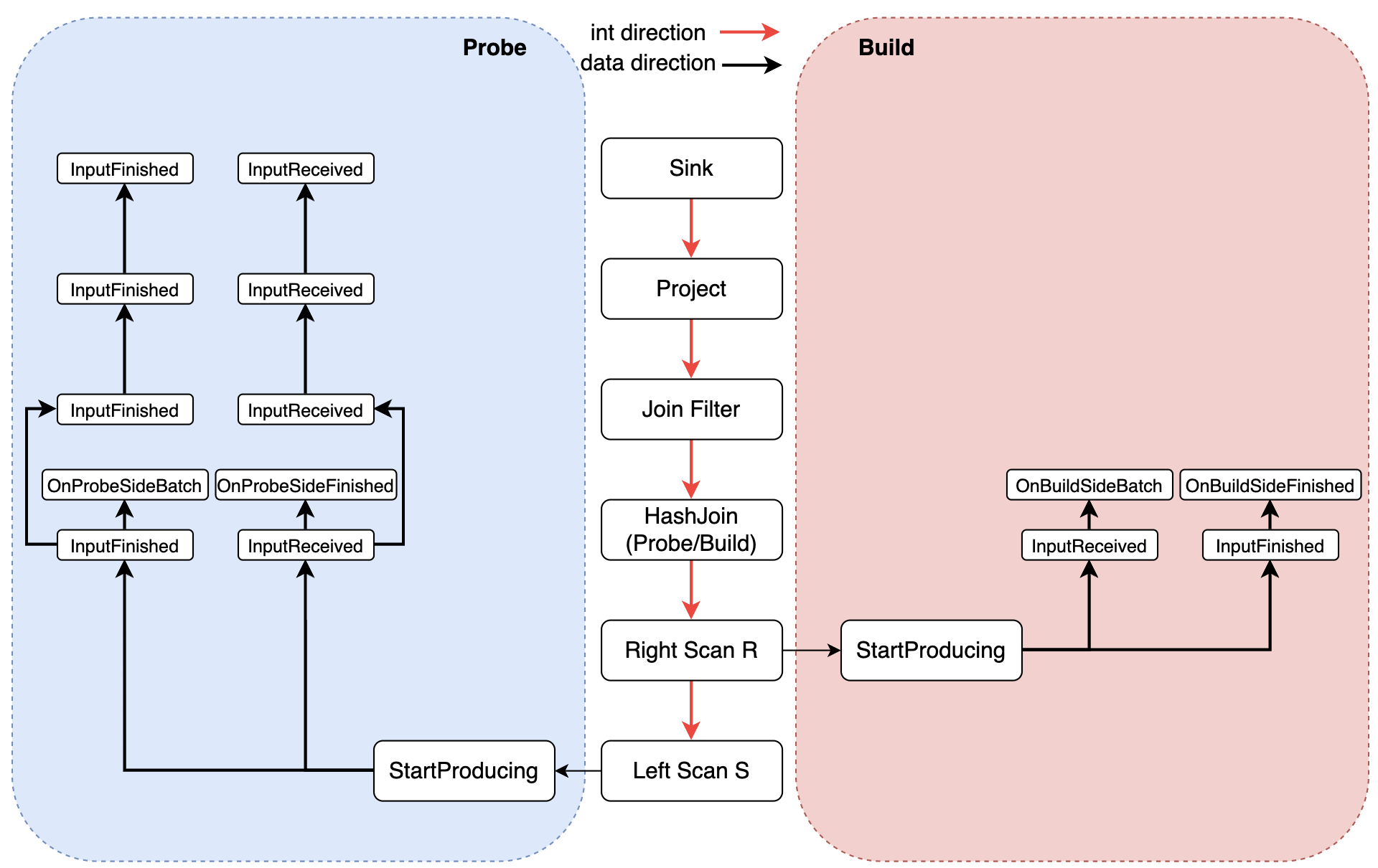
HashJoin 在 Apache Arrow 和PostgreSQL 中的实现
文章目录 背景PostgreSQL HashJoin实现PG 执行器架构HashJoin 基本流程HashJoin 实现细节Join 类型HashJoin 的划分阶段HashJoin 的分批处理阶段JOIN 类型的状态机转换HashJoin 的投影和过滤 Arrow Acero HashJoin实现Acero 基本框架HashJoin 基本流程 总结 背景 近两个月转到…...

FL Studio21.2.0.3421最新汉化破解版中文解锁下载完整版本
音乐在人们心中的地位日益增高,近几年音乐选秀的节目更是层出不穷,喜爱音乐,创作音乐的朋友们也是越来越多,音乐的类型有很多,好比古典,流行,摇滚等等。对新手友好程度基本上在首位,…...

docker在java项目中打成tar包
docker在java项目中打成tar包 1、首先安装一个docker desktop 2、mvn install项目后,建立一个自己的dockerfile 这里我以我的代码举例,from 镜像,这里你也能打包好一个镜像的基础上,from打好的镜像,这里我们用openj…...
No175.精选前端面试题,享受每天的挑战和学习
🤍 前端开发工程师(主业)、技术博主(副业)、已过CET6 🍨 阿珊和她的猫_CSDN个人主页 🕠 牛客高级专题作者、在牛客打造高质量专栏《前端面试必备》 🍚 蓝桥云课签约作者、已在蓝桥云课上架的前后端实战课程《Vue.js 和 Egg.js 开发企业级健康管理项目》、《带你从入…...

【网安AIGC专题10.19】论文6:Java漏洞自动修复+数据集 VJBench+大语言模型、APR技术+代码转换方法+LLM和DL-APR模型的挑战与机会
How Effective Are Neural Networks for Fixing Security Vulnerabilities 写在最前面摘要贡献发现 介绍背景:漏洞修复需求和Java漏洞修复方向动机方法贡献 数据集先前的数据集和Java漏洞Benchmark数据集扩展要求数据处理工作最终数据集 VJBenchVJBench 与 Vul4J 的…...

解决国外镜像无法访问导致的R包无法安装问题
我自己的方法: install.packages("vcd", repos "https://mirrors.tuna.tsinghua.edu.cn/CRAN/") R包安装镜像设置的三种方法:R包安装镜像设置的三种方法 - 简书 更新了Rstudio后,出现 unable to access index for rep…...
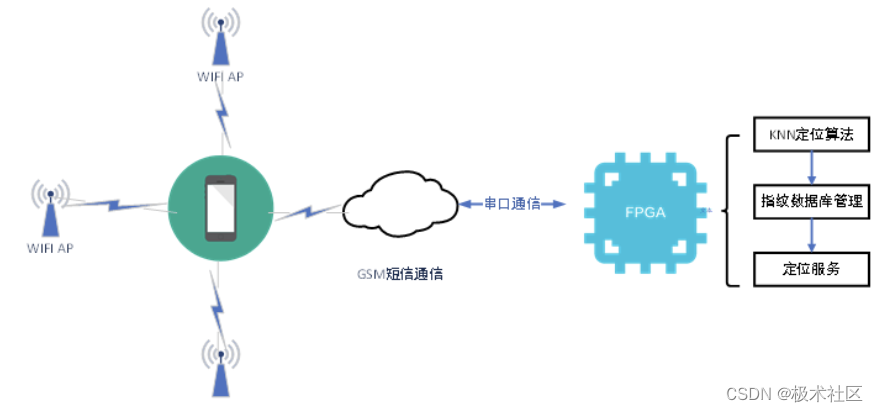
【2021集创赛】Robei杯一等奖:基于Robei EDA工具的隔离病房看护机器人设计
本作品参与极术社区组织的有奖征集|秀出你的集创赛作品风采,免费电子产品等你拿~活动。 团队介绍 参赛单位:重庆交通大学 队伍名称:一丘之貉 指导老师:毕波 李艾星 参赛队员:郁航 张坤 秦衡 总决赛奖项:Robei杯一等奖…...

Python之函数-传实参的两种方式
Python之函数-传实参的两种方式 函数参数 函数在定义是要定义好形式参数,调用时也提供足够的实际参数,一般来说,形参和实参个数要一致(可变参数除外)。实参传参方式 1、位置传参 定义时def f(x, y, z), 调用使用 f(1, 3, 5)&am…...

Hive客户端和Beeline命令行的基本使用
本专栏案例数据集链接: https://download.csdn.net/download/shangjg03/88478038 1.Hive CLI 1.1 命令帮助Help 使用 `hive -H` 或者 `hive --help` 命令可以查看所有命令的帮助,显示如下: usage: hive-d,--define <key=value> Variable subsitution to ap…...

Ubuntu 22.04自动登录进入桌面
1.编辑gdm3配置文件 sudo vim /etc/gdm3/custom.conf 2.修改内容为 AutomaticLoginEnableTrue AutomaticLoginusername 3.查看和重启服务 # 查看服务状态 systemctl --user status gnome-remote-desktop.service # 重启服务 systemctl --user restart gnome-remote-deskt…...
C#__简单了解XML文档
/* XML(可扩展标记语言):用于传输和存储数据 XML文档:树结构;包含根元素 XML元素:从开始标签到结束标签的部分 XML语法规则: 1、所有XML元素都必须有结束标签 …...

云游数智农业世界,体验北斗时空智能
今日,2023年中国国际农业机械展览会在武汉正式拉开帷幕,众多与会者云集,各类农机产品纷呈,盛况空前。 千寻位置作为国家北斗地基增强系统的建设与运营方,在中国国际农业机械展览会上亮相,以「北斗时空智能 …...

C# 递归算法使用简介_常用整理
一、递归简介 递归算法是一种直接或者间接调用自身函数或者方法的算法。 递归算法的实质是把问题分解成规模缩小的同类问题的子问题,然后递归调用方法来表示问题的解。递归算法对解决一大类问题很有效,它可以使算法简洁和易于理解。 递归本质是循环&a…...

.9017R 座充充电管理 IC
概述 .9017R 是恒流/恒压座充充电管理芯片,主要应用于单节锂电池充电。应用电路无需外接检测电阻,其内部为MOSFET 结构,因此也无需外接反向二极管。 .9017R 在大功率和高环境温度下可以自动调节充电电流以限制芯片温度。它的充电电压固定在4.…...
 2026)
渝中区宜居、 韧性、智慧城市建设“十五五”规划(征求意见稿) 2026
这份《渝中区宜居、韧性、智慧城市建设 “十五五” 规划(征求意见稿)》,立足渝中区 “重庆母城、都市极核、品质半岛、首善之区” 定位,总结 “十四五” 成效、分析机遇挑战,明确 2026—2030 年总体目标、核心任务与保…...

如何实现EditorConfig-Sublime与VSCode、IntelliJ的无缝协同工作流
如何实现EditorConfig-Sublime与VSCode、IntelliJ的无缝协同工作流 【免费下载链接】editorconfig-sublime Sublime Text plugin for EditorConfig - Helps developers maintain consistent coding styles between different editors 项目地址: https://gitcode.com/gh_mirro…...

利用Taotoken模型广场为AIGC应用选择性价比最优的文本生成模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用Taotoken模型广场为AIGC应用选择性价比最优的文本生成模型 对于AIGC应用开发者而言,文本生成模型的选择直接影响着…...

毛发质感始终“塑料感”?5类生物毛发纹理映射表,含真实显微扫描数据+对应--s、--style、--stylize配置
更多请点击: https://codechina.net 第一章:毛发质感生成的核心困境与突破路径 毛发渲染在影视特效、实时游戏与数字人建模中长期面临物理真实性与计算效率的双重挑战。其核心困境源于微观几何结构的多尺度耦合特性——单根毛发具有弯曲、扭转、分叉、鳞…...
)
21 鸿蒙LiteOS软件定时器实战:多定时器周期性任务完整示例(源码+解析)
鸿蒙LiteOS软件定时器实战:多定时器周期性任务完整示例(源码解析) 一、前言 在嵌入式鸿蒙(OpenHarmony LiteOS)开发中,软件定时器是实现周期性任务、延时任务、定时触发逻辑的核心内核工具,无…...

G-Helper终极指南:释放华硕笔记本潜能的免费开源神器
G-Helper终极指南:释放华硕笔记本潜能的免费开源神器 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenbook, Exp…...

Android截图限制终极解决方案:如何绕过FLAG_SECURE实现自由截屏
Android截图限制终极解决方案:如何绕过FLAG_SECURE实现自由截屏 【免费下载链接】DisableFlagSecure 项目地址: https://gitcode.com/gh_mirrors/dis/DisableFlagSecure 你是否曾在使用银行APP时想要截屏保存交易记录,却发现屏幕一片漆黑&#x…...

情感演绎有多强?顶伯实测愤怒、喜悦、悲伤等 9 种语气
🎭 微软 TTS 的情感演绎有多强?顶伯实测愤怒、喜悦、悲伤等 9 种语气🎯 引言:语音合成的情感革命在人工智能语音合成领域,情感表达一直是技术难点。微软 TTS(文本转语音)通过深度学习模型&#…...

如何5分钟部署小鹿快传:零基础P2P文件传输终极指南
如何5分钟部署小鹿快传:零基础P2P文件传输终极指南 【免费下载链接】deershare 小鹿快传,一款在线P2P文件传输工具,使用WebSocket WebRTC技术 项目地址: https://gitcode.com/gh_mirrors/de/deershare 小鹿快传(DeerShare…...