Ortec974A EPICS IOC程序
Ortec974A设备介绍,请见Ortec -- 974A 四通道100-MHz计时器/计数器_ortec974a_EPICS Technical的博客-CSDN博客
1) 创建一个用户存放这个IOC程序结构的目录:
root@orangepi4-lts:/usr/local/EPICS/program# mkdir ortec974A
root@orangepi4-lts:/usr/local/EPICS/program# cd ortec974A/
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A# ls
2)使用makeBaseApp.pl构建这个IOC程序架构:
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A# makeBaseApp.pl -t ioc ortec974A
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A# makeBaseApp.pl -i -t ioc ortec974A
Using target architecture linux-aarch64 (only one available)
The following applications are available:ortec974A
What application should the IOC(s) boot?
The default uses the IOC's name, even if not listed above.
Application name?
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A# ls
configure iocBoot Makefile ortec974AApp3)编辑configure/RELEASE文件,添加这个IOC程序所需要的其它依赖模块:
...
SUPPORT=/usr/local/EPICS/synApps/support
ASYN=$(SUPPORT)/asyn
AUTOSAVE=$(SUPPORT)/autosave
CALC=$(SUPPORT)/calc
SCALER=$(SUPPORT)/scaler
...
4) 进入源文件目录ortec974AApp/src目录下:
a) 编写974A驱动程序源文件:
// drvOrtec974A.cpp
#include <stdlib.h>
#include <stddef.h>
#include <string.h>
#include <stdio.h>
#include <math.h>#include <asynPortDriver.h>
#include <asynOctetSyncIO.h>
#include <epicsEvent.h>
#include <epicsThread.h>
#include <epicsTime.h>
#include <errlog.h>
#include <iocsh.h>
#include <epicsExport.h> /* Defines epicsExportSharedSymbols */#include "devScalerAsyn.h"#define MAX_CHANNELS 4#define timeOut 0.1
static const char *driverName= "Scaler974A";class Scaler974A:public asynPortDriver
{
public:Scaler974A(const char *portName, const char *serialPort, int serialAddr, int poll);virtual asynStatus writeInt32(asynUser *pasynUser, epicsInt32 value);virtual asynStatus readInt32Array(asynUser *pasynUser,epicsInt32 *value, size_t nElements, size_t *nIn);virtual void report(FILE *fp, int details);void eventThread();private:int scalerReset;int scalerChannels;int scalerRead;int scalerReadSingle;int scalerPreset;int scalerArm;int scalerDone;double polltime;epicsEventId eventId;asynUser *pasynUserScaler;asynStatus sendCommand(const char *command, char *statusString, size_t maxStatusLen, size_t *statusLen);
};static void eventThreadC(void *pPvt)
{Scaler974A *pScaler974A = (Scaler974A *)pPvt;pScaler974A->eventThread();
}Scaler974A::Scaler974A(const char *portName, const char *serialPort, int serialAddr, int poll):asynPortDriver(portName, MAX_CHANNELS,asynInt32Mask | asynInt32ArrayMask | asynDrvUserMask,asynInt32Mask,/* Should also be ASYN_CANBLOCK, but device support does not work with asynchronous devices */ASYN_MULTIDEVICE,1,0,0)
{int i;asynStatus status;static const char *functionName="Scaler974A";if (poll==0) poll=100;this->polltime=poll / 1000.;this->eventId = epicsEventCreate(epicsEventEmpty);status = pasynOctetSyncIO->connect(serialPort, serialAddr, &this->pasynUserScaler, NULL);if (status != asynSuccess) {asynPrint(this->pasynUserSelf, ASYN_TRACE_ERROR,"%s:%s: error connecting to port %s address %d\n",driverName, functionName, serialPort, serialAddr);return;}createParam(SCALER_RESET_COMMAND_STRING, asynParamInt32, &this->scalerReset);createParam(SCALER_CHANNELS_COMMAND_STRING, asynParamInt32, &this->scalerChannels);createParam(SCALER_READ_COMMAND_STRING, asynParamInt32Array,&this->scalerRead);createParam(SCALER_READ_SINGLE_COMMAND_STRING, asynParamInt32, &this->scalerReadSingle);createParam(SCALER_PRESET_COMMAND_STRING, asynParamInt32, &this->scalerPreset);createParam(SCALER_ARM_COMMAND_STRING, asynParamInt32, &this->scalerArm);createParam(SCALER_DONE_COMMAND_STRING, asynParamInt32, &this->scalerDone);setIntegerParam(scalerChannels, MAX_CHANNELS);setIntegerParam(scalerDone, 1);for (i=0; i<MAX_CHANNELS; i++) setIntegerParam(i, scalerReadSingle, 0);epicsThreadCreate("Scaler974A",epicsThreadPriorityMedium,epicsThreadGetStackSize(epicsThreadStackMedium),(EPICSTHREADFUNC)eventThreadC,this);
}asynStatus Scaler974A::sendCommand(const char *command, char *statusString, size_t maxStatusLen, size_t *statusLen)
{size_t nWrite;asynStatus status;double timeout = 1.0;int eomReason;static const char *functionName = "sendCommand";/** asynStatus (*writeRead)(asynUser *pasynUser,const char *write_buffer, size_t write_buffer_len,char *read_buffer, size_t read_buffer_len,double timeout,size_t *nbytesOut, size_t *nbytesIn, int *eomReason);要写的字符串,要写的字符串长度,读出缓存,要读的字节数目,超时时间,实际写出的字节数,实际读入的字符数,结束原因asynStatus (*write)(asynUser *pasynUser, char const *buffer, size_t buffer_len,double timeout,size_t *nbytesTransfered);asynStatus (*read)(asynUser *pasynUser, char *buffer, size_t buffer_len,double timeout, size_t *nbytesTransfered,int *eomReason);** */status = pasynOctetSyncIO->write(this->pasynUserScaler, command, strlen(command), timeout, &nWrite);
// printf("In sendCommand write status: %d,write content:%s,write length:%d\n", status, command, nWrite);if (status != asynSuccess) goto done;epicsThreadSleep(.1);status = pasynOctetSyncIO->read(this->pasynUserScaler,statusString, maxStatusLen, timeout, statusLen, &eomReason);
// printf("In sendCommand read status: %d, statusString:%s\n", status, statusString);done:if (status != asynSuccess) {asynPrint(this->pasynUserSelf, ASYN_TRACE_ERROR,"%s:%s: writing command %s, error=%s\n",driverName, functionName, command, this->pasynUserScaler->errorMessage);}return(status);
}asynStatus Scaler974A::writeInt32(asynUser *pasynUser, epicsInt32 value)
{int function = pasynUser->reason;char response[256];size_t responseLen;asynStatus status = asynSuccess;static const char *functionName="writeInt32";setIntegerParam(function, value);if(function==this->scalerReset){this->sendCommand("STOP\r", response, sizeof(response), &responseLen);//printf("STOP:%s\n", response);this->sendCommand("CLEAR_ALL\r", response, sizeof(response), &responseLen);//printf("CLEAR_ALL:%s\n", response);asynPrint(pasynUser, ASYN_TRACE_FLOW, "%s:%s scalerReset\n",driverName, functionName);}else if(function==this->scalerArm){if(value !=0){/* Start counting */this->sendCommand("START\r", response, sizeof(response), &responseLen);
// printf("START:%s\n", response);setIntegerParam(scalerDone, 0);epicsEventSignal(this->eventId);}else{/* Stop counting */status = this->sendCommand("STOP\r", response, sizeof(response), &responseLen);
// printf("STOP:%s\n", response);setIntegerParam(scalerDone, 1);}asynPrint(pasynUser, ASYN_TRACE_FLOW, "%s:%s scalerArm=%d\n", driverName, functionName,value);}else if(function==this->scalerPreset){int m,n;char newstr[25];n=(int)log10(double(value));m=(int)(value/pow(10.0,n));sprintf(newstr, "SET_COUNT_PRESET %d,%d\r", m, n);this->sendCommand(newstr, response, sizeof(response), &responseLen);
// printf("SET_COUNT_PRESET:%s\n", response);asynPrint(pasynUser, ASYN_TRACE_FLOW, "%s;%s scalerPreset channel", driverName, functionName);}else{asynPrint(pasynUser,ASYN_TRACE_ERROR,"%s:%s got illegal function %d\n", driverName, functionName, function);}callParamCallbacks();return(status);
}asynStatus Scaler974A::readInt32Array(asynUser *pasynUser, epicsInt32 *value, size_t maxChannel, size_t *nIn)
{static const char *functionName="readInt32Array";int function = pasynUser->reason;int temp;int i;if (maxChannel > MAX_CHANNELS) maxChannel = MAX_CHANNELS;*nIn = maxChannel;if (function==scalerRead){for (i=0; i<(int)maxChannel; i++){getIntegerParam(i, scalerReadSingle, &temp);value[i] = temp;}asynPrint(pasynUser, ASYN_TRACEIO_DRIVER,"%s:%s: value=%d %d %d %d\n",driverName, functionName, value[0], value[1], value[2], value[3]);} else {asynPrint(pasynUser,ASYN_TRACE_ERROR,"%s:%s got illegal function %d\n", driverName, functionName, function);return(asynError);}return(asynSuccess);
}void Scaler974A::report(FILE *fp, int details)
{asynPortDriver::report(fp, details);
}void Scaler974A::eventThread()
{int done, presetCount;char response[100], statusString[256];size_t responseLen, statusLen;int counts[MAX_CHANNELS];int i;asynStatus status;static const char *functionName="eventThread";while(1){epicsEventMustWait(this->eventId);while(1){status = this->sendCommand("SHOW_COUNTS\r", statusString, sizeof(statusString), &statusLen);sscanf(statusString, "%d;%d;%d;%d;",&counts[0], &counts[1], &counts[2], &counts[3]);
// printf("%d;%d;%d;%d\n", counts[0],counts[1],counts[2],counts[3]);asynPrint(this->pasynUserSelf, ASYN_TRACEIO_DRIVER,"%s:%s status=%d, counts=%d %d %d %d\n",driverName, functionName, status, counts[0], counts[1], counts[2], counts[3]);this->lock();/* Get value of done in case scaler was stopped by scalerArm(0) */getIntegerParam(scalerDone, &done);getIntegerParam(scalerPreset, &presetCount);if (!done && (counts[0] >= presetCount)) done = 1;setIntegerParam(scalerDone, done);for (i=0; i<MAX_CHANNELS; i++) {setIntegerParam(i, scalerReadSingle, counts[i]);callParamCallbacks(i, i);}this->unlock();if (done) break;epicsThreadSleep(this->polltime/1000.0);}}
}extern "C" int initScaler974A(const char *portName, const char *serialPort, int serialAddr, int poll)
{new Scaler974A(portName, serialPort, serialAddr, poll);return(asynSuccess);
}/* iocsh function */
static const iocshArg initArg0 = {"Port Name", iocshArgString};
static const iocshArg initArg1 = {"IPPort", iocshArgString};
static const iocshArg initArg2 = {"Addr", iocshArgString};
static const iocshArg initArg3 = {"Poll", iocshArgInt};
static const iocshArg *const initArgs[] = {&initArg0,&initArg1,&initArg2,&initArg3};
static const iocshFuncDef initFuncDef = {"initScaler974A",4, initArgs};
static void initCallFunc(const iocshArgBuf *args)
{initScaler974A(args[0].sval, args[1].sval, args[2].ival, args[3].ival);
}void Scaler974ARegister(void)
{iocshRegister(&initFuncDef,initCallFunc);
}extern "C" {
epicsExportRegistrar(Scaler974ARegister);
}b) 添加一个dbd文件ortec974ASupport.dbd:
registrar(Scaler974ARegister)c) 修改同一目录下Makefile文件,指定编译中需要包含的库文件和源文件:
TOP=../..include $(TOP)/configure/CONFIG
#----------------------------------------
# ADD MACRO DEFINITIONS AFTER THIS LINE
#=============================#=============================
# Build the IOC applicationPROD_IOC = ortec974A
# ortec974A.dbd will be created and installed
DBD += ortec974A.dbd# ortec974A.dbd will be made up from these files:
ortec974A_DBD += base.dbd
ortec974A_DBD += ortec974ASupport.dbd# Include dbd files from all support applications:
#ortec974A_DBD += xxx.dbdortec974A_DBD += drvAsynIPPort.dbd
ortec974A_DBD += asyn.dbd
ortec974A_DBD += scalerSupport.dbd
ortec974A_DBD += calcSupport.dbd
ortec974A_DBD += asSupport.dbd# Include dbd files from all support applications:
#ortec974A_DBD += xxx.dbd# Add all the support libraries needed by this IOC
ortec974A_LIBS += asyn
ortec974A_LIBS += scaler
ortec974A_LIBS += calc
ortec974A_LIBS += autosave# Add all the support libraries needed by this IOC
#ortec974A_LIBS += xxxortec974A_SRCS += drvOrtec974A.cpp
# ortec974A_registerRecordDeviceDriver.cpp derives from ortec974A.dbd
ortec974A_SRCS += ortec974A_registerRecordDeviceDriver.cpp# Build the main IOC entry point on workstation OSs.
ortec974A_SRCS_DEFAULT += ortec974AMain.cpp
ortec974A_SRCS_vxWorks += -nil-# Add support from base/src/vxWorks if needed
#ortec974A_OBJS_vxWorks += $(EPICS_BASE_BIN)/vxComLibrary# Finally link to the EPICS Base libraries
ortec974A_LIBS += $(EPICS_BASE_IOC_LIBS)#===========================include $(TOP)/configure/RULES
#----------------------------------------
# ADD RULES AFTER THIS LINE5) 进入ortec974AApp/Db目录,编写一个用于自动保存的文件scaler4_settings.req:
$(P)$(S).TP
$(P)$(S).TP1
$(P)$(S).CONT
$(P)$(S).DLY1
$(P)$(S).RAT1
$(P)$(S).PREC
$(P)$(S).FREQ
$(P)$(S).RATE
$(P)$(S).DLY
$(P)$(S).COUT
file "scaler_channelN_settings.req", P=$(P), S=$(S), Ch=1
file "scaler_channelN_settings.req", P=$(P), S=$(S), Ch=2
file "scaler_channelN_settings.req", P=$(P), S=$(S), Ch=3
file "scaler_channelN_settings.req", P=$(P), S=$(S), Ch=4在同一目录下的Makefile中添加一行:DB += scaler4_settings.req
6) 退出到这个IOC的顶层目录,执行make进行程序编译。
7)进入到启动目录iocBoot/iocortec974A,创建两个目录:
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A/iocBoot/iocortec974A# mkdir -p req/ortec974A
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A/iocBoot/iocortec974A# mkdir -p autosave/ortec974A在req/ortec974A下编写一个用于自动保存的文件auto_settings.req,内容如下:
file scaler4_settings.req P=$(P) S=$(S)编写启动脚本:
#!../../bin/linux-aarch64/ortec974A#- You may have to change ortec974A to something else
#- everywhere it appears in this file< envPathscd "${TOP}"## Register all support components
dbLoadDatabase "dbd/ortec974A.dbd"
ortec974A_registerRecordDeviceDriver pdbbasedrvAsynIPPortConfigure("ortec974A", "192.168.3.30:4001", 0, 0 ,1)initScaler974A("tcportec974A","ortec974A",0,10)
dbLoadRecords("${SCALER}/db/scaler.db", "P=Ortec974A:,S=Scaler1,OUT=@asyn(tcportec974A 0 0),DTYP=Asyn Scaler,FREQ=10,TP=1,TP1=0.5,PR1=1,CONT=1")set_requestfile_path("$(TOP)/db")
set_requestfile_path("$(SCALER)/db")
set_requestfile_path("$(TOP)/iocBoot/$(IOC)/req/ortec974A")# 通过调用set_savefile_path函数指定你想要.sav文件被写到哪个目录中。
set_savefile_path("$(TOP)/iocBoot/$(IOC)/autosave/ortec974A")# 使用set_pass<N>_restoreFile()函数
# 指定哪些save文件要在记录初始化前(pass 0)前被恢复,以及哪些save文件在记录初始化后(pass 1)被恢复
set_pass1_restoreFile("auto_settings.sav")save_restoreSet_numSeqFiles(3)
save_restoreSet_SeqPeriodInSeconds(600)
save_restoreSet_RetrySeconds(60)
save_restoreSet_CAReconnect(1)
save_restoreSet_CallbackTimeout(-1)dbLoadRecords("$(ASYN)/db/asynRecord.db","P=Ortec974A:Scaler1:,R=Asyn,PORT=ortec974A,ADDR=0,IMAX=100,OMAX=100")cd "${TOP}/iocBoot/${IOC}"
iocInitcreate_monitor_set("auto_settings.req",5,"P=Ortec974A:,S=Scaler1")8) 用以上启动脚本启动这个IOC程序:
root@orangepi4-lts:/usr/local/EPICS/program/ortec974A/iocBoot/iocortec974A# ../../bin/linux-aarch64/ortec974A st.cmd9)查看这个IOC加载的记录:
epics> dbl
Ortec974A:Scaler1:Asyn
Ortec974A:Scaler110) 用CSS编写操作客户端:
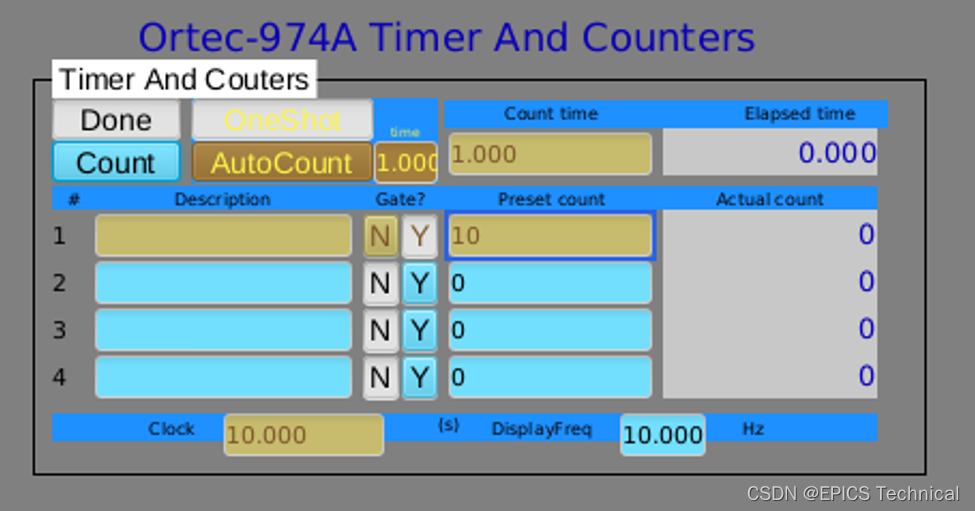 11) 在97A的3号输入端口接入一个3MHz的TTL信号,将计数时间设置为1.0秒,点击Count按钮,进行1秒钟计数:
11) 在97A的3号输入端口接入一个3MHz的TTL信号,将计数时间设置为1.0秒,点击Count按钮,进行1秒钟计数:
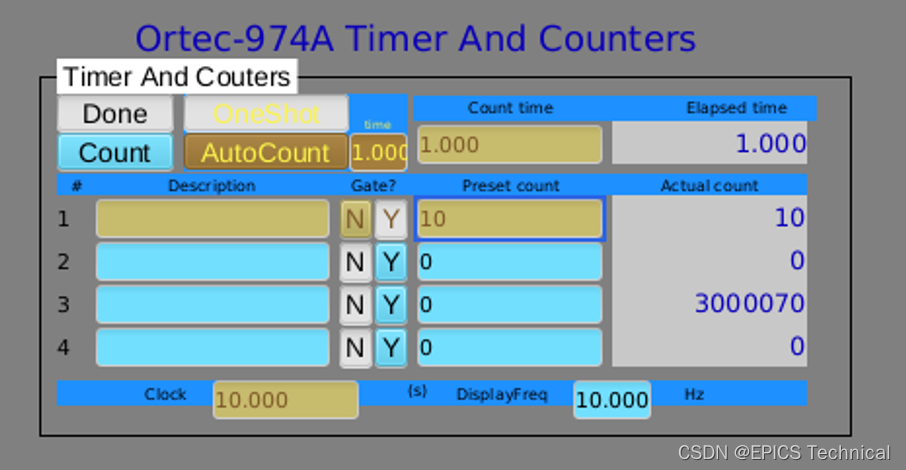
通道3能够读出计数器的正确计数值。
相关文章:
Ortec974A EPICS IOC程序
Ortec974A设备介绍,请见Ortec -- 974A 四通道100-MHz计时器/计数器_ortec974a_EPICS Technical的博客-CSDN博客 1) 创建一个用户存放这个IOC程序结构的目录: rootorangepi4-lts:/usr/local/EPICS/program# mkdir ortec974A rootorangepi4-l…...

JS-文件下载,实现在ios也是下载 而不是预览,
需求 通过A链接的方式,把从后台获取到的文件下载到本地,实现在移动端,PC端都能下载 问题 通过ajax请求后端生成的文件流之后,创建BLOB文件进行下载,在PC端和移动安卓端都可以实现下载到本地和对应的手机,而在IOS端的…...

Leetcode.275 H 指数 II
题目链接 Leetcode.275 H 指数 II mid 题目描述 给你一个整数数组 c i t a t i o n s citations citations ,其中 c i t a t i o n s [ i ] citations[i] citations[i] 表示研究者的第 i i i 篇论文被引用的次数, c i t a t i o n s citations citat…...

代码随想录Day40-单调栈:力扣第496e、503m、42h、84h题
496e. 下一个更大元素 I 题目链接 代码随想录文章讲解链接 方法一:单调栈哈希表 用时:13m52s 思路 维护一个栈底到栈顶是单调递减的栈,从后往前遍历数组nums2,更新栈。nums2当前元素nums2[i]的下一个更大元素就是栈顶元素&am…...
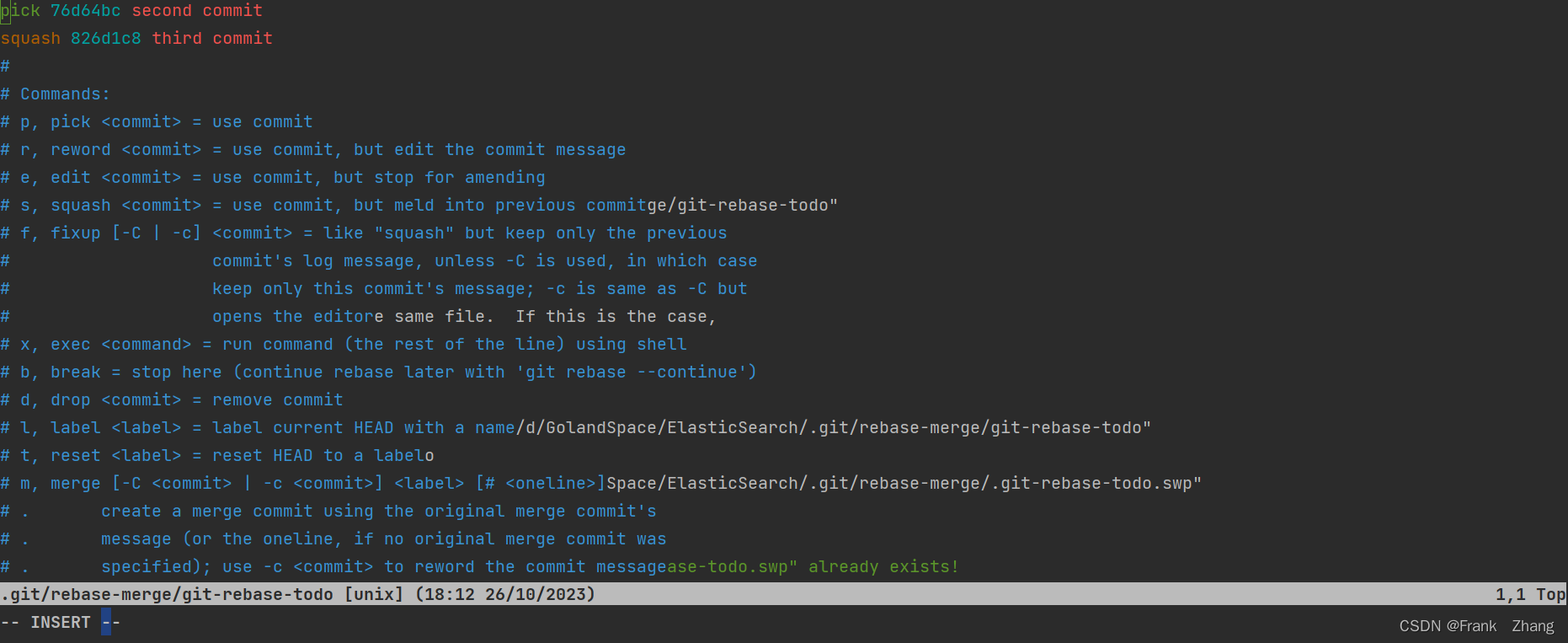
Git窗口打开vim后如何退出编辑(IDEA/Goland等编辑器)
最近在学习git高级操作过程中,遇到了一下问题: 我在学习Git合并多个commit为一个的时候,需要输入一个命令 git rebase -i HEAD~2 这说明已经是编辑模式了。当我写好后,我还按照原来在linux上的按下ESC键,但是只是光…...

【CSDN 每日一练 ★★☆】【二叉树/BSF】二叉树的层序遍历
【CSDN 每日一练 ★★☆】【二叉树/BSF】二叉树的层序遍历 二叉树 BSF 题目 给你一个二叉树,请你返回其按 层序遍历 得到的节点值。 (即逐层地,从左到右访问所有节点)。 示例: 二叉树:[3,9,20,null,nul…...
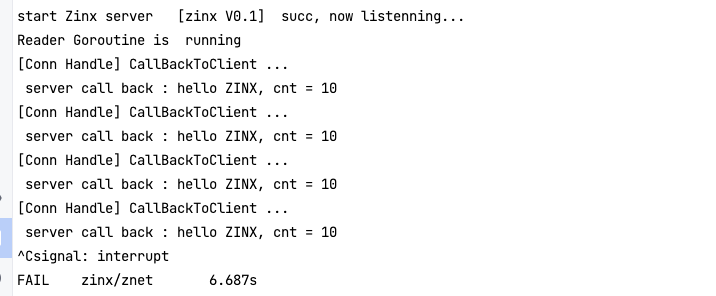
Golang | Zinx学习笔记(一)
参考 http://zinx.me/ https://www.kancloud.cn/aceld/zinx/1960213 https://www.yuque.com/aceld/tsgooa/gx01meg5ow4pftac 说明 zinx是一个基于Golang的轻量级并发服务器框架。 目前zinx已经在很多企业进行开发使用,具体使用领域包括:后端模块的消息中转、长链…...

【Java 进阶篇】在Java Web应用中获取ServletContext对象详解
在Java Web应用开发中,ServletContext对象扮演着重要的角色,它允许你在整个Web应用程序中存储和共享数据。ServletContext对象是Servlet容器提供的一种用于管理Web应用程序的全局信息的方式。本文将详细探讨ServletContext对象的概念、用途以及如何在Jav…...

负债6W,依靠这个项目副业6个月还清欠款,还多存了10W+
真不敢想象负债6W“走投无路”的我还能通过副业逆天翻盘,6个月还清欠款,还让我多了10W存款,现在小日子也是相当滋润,吃穿不愁,不用过多为生计而奔波操劳。 仅代表个人收益 网盘下载地址:【安卓软件】音魔变…...
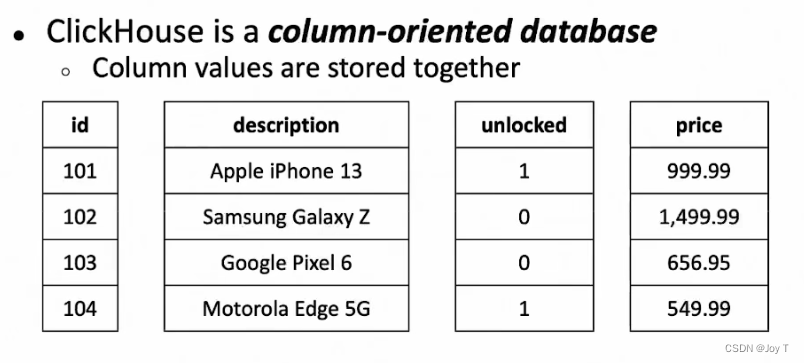
快速了解ClickHouse!
简介 ClickHouse是一个开源列式数据库管理系统(DBMS),用于在线分析处理(OLAP): 列式存储:与传统的行式数据库不同,ClickHouse以列的形式存储数据,这使得在分析大量数据时…...
PythonWEB
文章目录 前端简介1. 什么是网页2. 网页的组成3. 网页的优势4. 前端三剑客5. 编写步骤6. HTTP协议 HTML51. HTML介绍2. 元素3. 使用4. 基本结构解析5. 常用标签文本标签容器标签列表标签表格标签表单标签 对于文件数据的提交需要满足以下两个条件:6. 标签分类 前端简…...
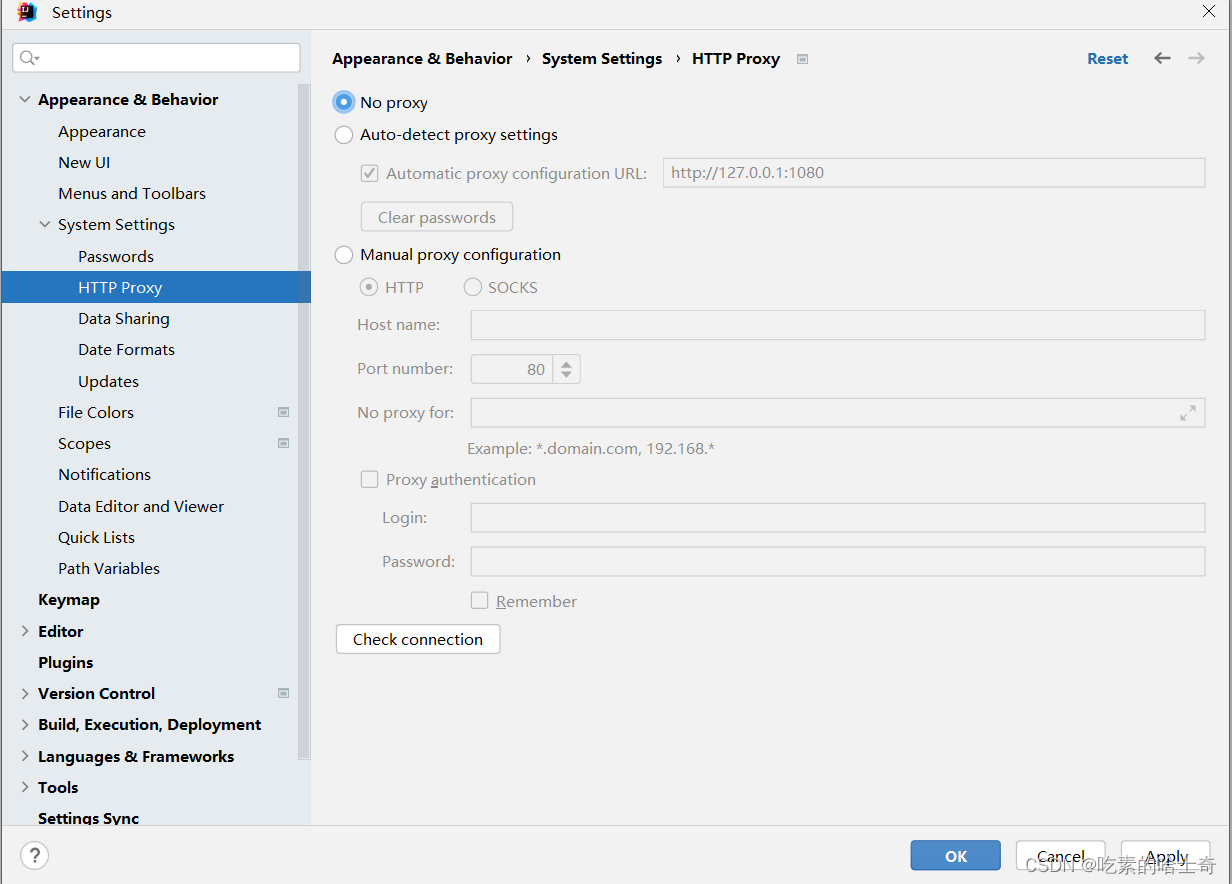
【工具问题】IDEA每次关闭的时候都会弹框显示closing project,然后弹框持续很久就像卡住了
idea关闭的时候出现问题 问题展示为什么会出现这种情况怎么解决 问题展示 我idea已经关闭了,但是这个弹框要持续很久才能关闭 为什么会出现这种情况 我的plugins原本是加载不出来的,所以我按照网上说法去做 怎么解决 file->setting,再如图选择…...

从瀑布模式到水母模式:ChatGPT如何赋能软件研发全流程
文章目录 前言内容简介作者简介专家推荐读者对象直播预告 前言 计算机技术的发展和互联网的普及,使信息处理和传输变得更加高效,极大地改变了金融、商业、教育、娱乐等领域的运作方式。数据分析、人工智能和云计算等新兴技术,也在不断地影响和…...
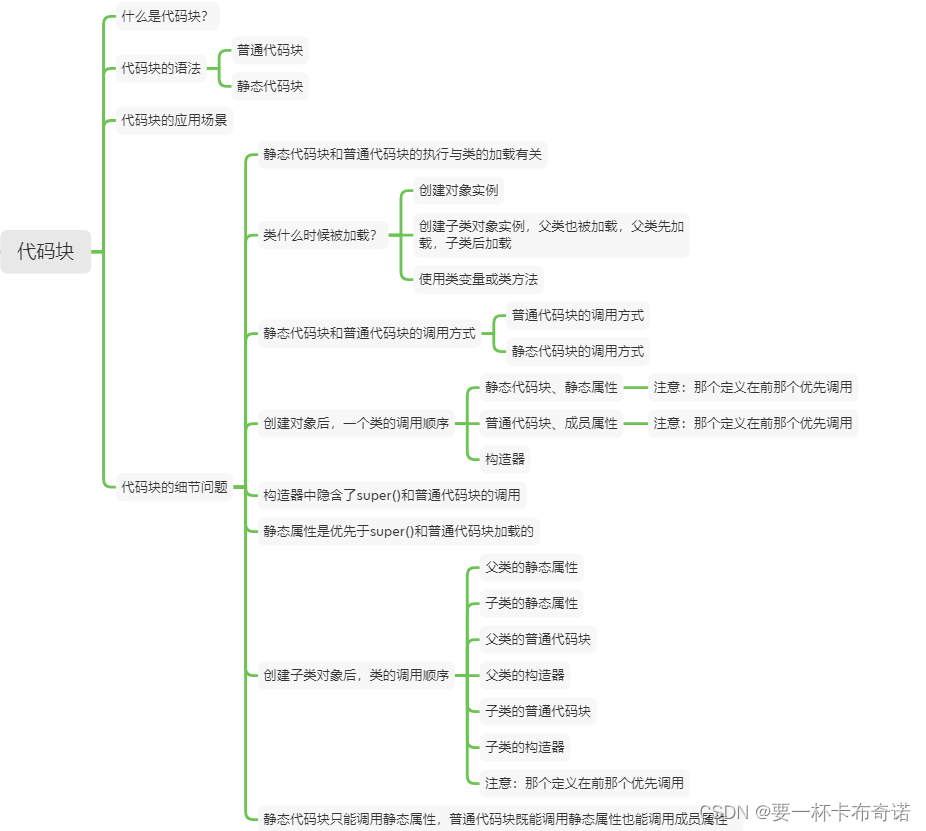
类变量/方法、main语法、代码块
一.类变量和方法 思维导图概览: 1.1类变量(静态变量) 1.什么叫做类变量/方法? ——给类中的成员属性或成员方法加上static关键字进行修饰,类变量/方法也叫做静态变量/方法,静态变量/方法被类的自身所有对…...

[SHCTF 校外赛道] crypto
终于都结束了,这些新生赛太漫长了。不过这个也还是有些难度的,好多整不来。抓紧时间整理一下。 week1 第1周基本是古典密码,古典和现代最大的区别是古典全靠猜,现在都是数学 立正 wl hgrfhg 4gNUx4NgQgEUb4NC64NHxZLg636V6CDBi…...

vue3从基础到入门(一)
文章目录 简介提升使用创建脚手架vite 常用Composition APIsetuprefreactive函数响应式vue2响应式vue3实现响应式 reactive对比ref注意计算属性computed函数 监视watch函数watchEffect函数 生命周期hook函数toRef 简介 2020年9月18日,Vue.js发布3.0版本,…...

枚举类型 表示不同的 HTTP 状态码和相应的错误消息
java web业务中经常用常量来表示不同的 HTTP 响应状态,比如 public enum AppHttpCodeEnum {// 成功段0SUCCESS(200,"操作成功"),// 登录段1~50NEED_LOGIN(1,"需要登录后操作"),LOGIN_PASSWORD_ERROR(2,"密码错误"),// TOKEN50~100TOKEN_INVALID…...
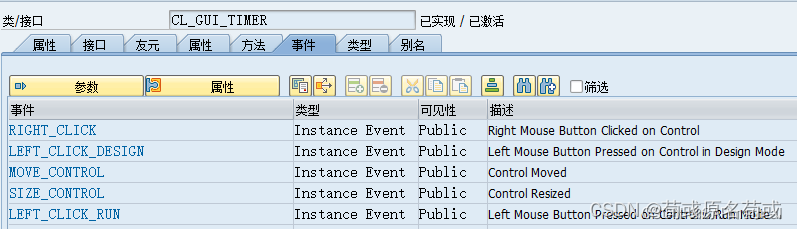
SAP 使用cl_gui_timer自动刷新屏幕的用法详解 <转载>
原文链接:https://blog.csdn.net/SAPmatinal/article/details/130483382 SAP 使用cl_gui_timer自动刷新屏幕的用法详解 这个类在初始化的时候会设置一个定时间隔,每隔这个时间就会触发一次FINISHED事件。利用这个类的特性,可以实现很多东西&…...
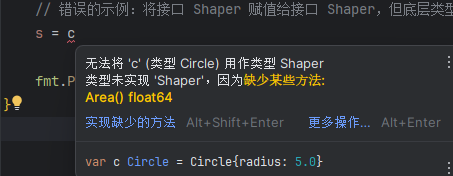
golang中的Interface接口 类型断言、接口赋值、空接口的使用、接口嵌套
Interface整理 文章目录 Interface整理接口嵌套接口类型断言类型判断 type-switch使用方法集与接口空接口实例 接口赋值给接口 接口是一种契约,实现类型必须满足它,它描述了类型的行为,规定类型可以做什么。接口彻底将类型能做什么࿰…...

使用设计模式省去大量的if-elsef分支
1.测试类 Testpublic void test7() {/*** 使用设计模式前*///模拟入参String name "?";if("张三".equals(name)){System.out.println("按照张三的策略执行的任务!");}else if ("李四".equals(name)){System.out.println("按照李…...

web vue 项目 Docker化部署
Web 项目 Docker 化部署详细教程 目录 Web 项目 Docker 化部署概述Dockerfile 详解 构建阶段生产阶段 构建和运行 Docker 镜像 1. Web 项目 Docker 化部署概述 Docker 化部署的主要步骤分为以下几个阶段: 构建阶段(Build Stage):…...

C++_核心编程_多态案例二-制作饮品
#include <iostream> #include <string> using namespace std;/*制作饮品的大致流程为:煮水 - 冲泡 - 倒入杯中 - 加入辅料 利用多态技术实现本案例,提供抽象制作饮品基类,提供子类制作咖啡和茶叶*//*基类*/ class AbstractDr…...

智慧工地云平台源码,基于微服务架构+Java+Spring Cloud +UniApp +MySql
智慧工地管理云平台系统,智慧工地全套源码,java版智慧工地源码,支持PC端、大屏端、移动端。 智慧工地聚焦建筑行业的市场需求,提供“平台网络终端”的整体解决方案,提供劳务管理、视频管理、智能监测、绿色施工、安全管…...
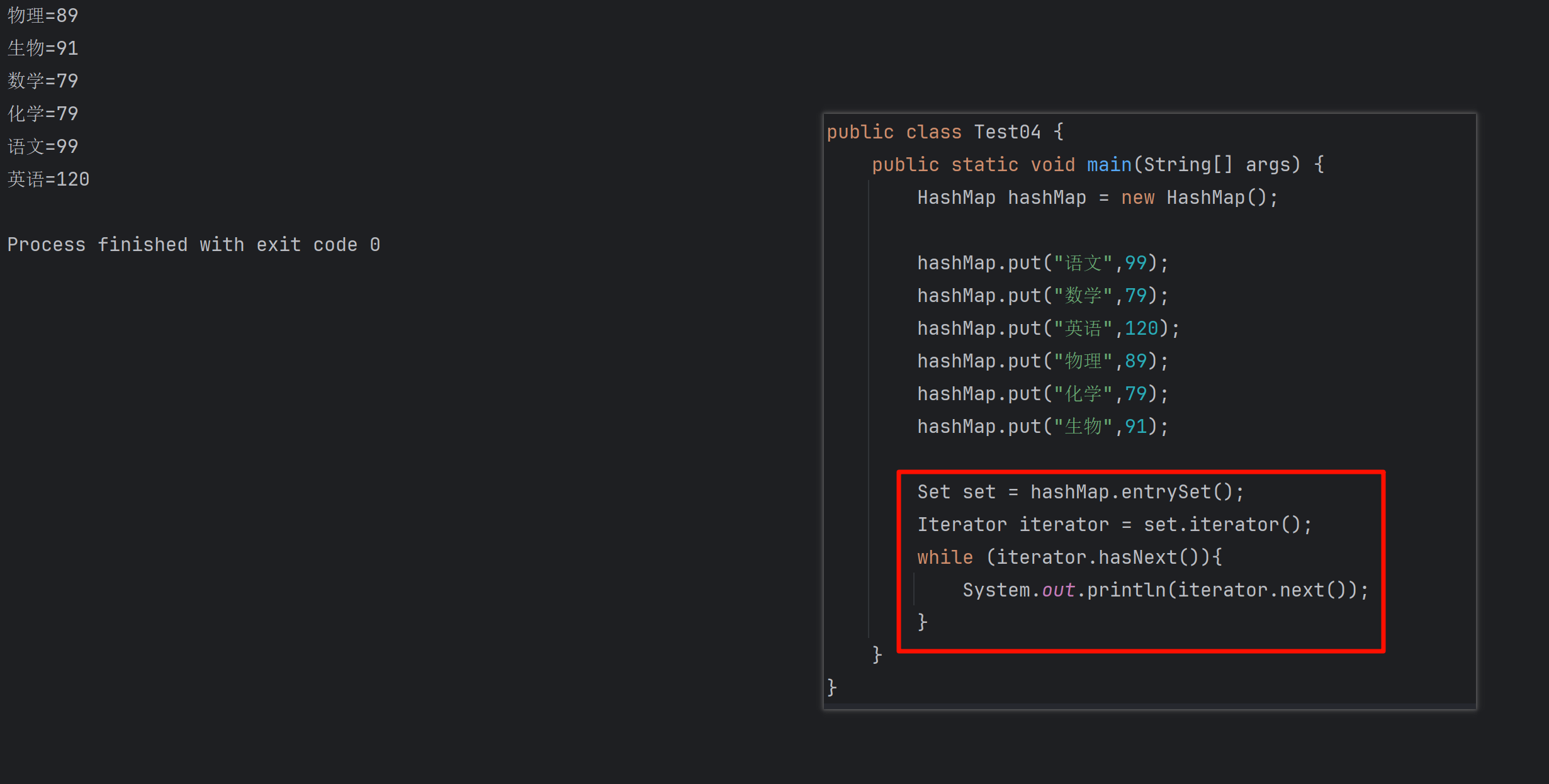
遍历 Map 类型集合的方法汇总
1 方法一 先用方法 keySet() 获取集合中的所有键。再通过 gey(key) 方法用对应键获取值 import java.util.HashMap; import java.util.Set;public class Test {public static void main(String[] args) {HashMap hashMap new HashMap();hashMap.put("语文",99);has…...

【C语言练习】080. 使用C语言实现简单的数据库操作
080. 使用C语言实现简单的数据库操作 080. 使用C语言实现简单的数据库操作使用原生APIODBC接口第三方库ORM框架文件模拟1. 安装SQLite2. 示例代码:使用SQLite创建数据库、表和插入数据3. 编译和运行4. 示例运行输出:5. 注意事项6. 总结080. 使用C语言实现简单的数据库操作 在…...

OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别
OpenPrompt 和直接对提示词的嵌入向量进行训练有什么区别 直接训练提示词嵌入向量的核心区别 您提到的代码: prompt_embedding = initial_embedding.clone().requires_grad_(True) optimizer = torch.optim.Adam([prompt_embedding...

#Uniapp篇:chrome调试unapp适配
chrome调试设备----使用Android模拟机开发调试移动端页面 Chrome://inspect/#devices MuMu模拟器Edge浏览器:Android原生APP嵌入的H5页面元素定位 chrome://inspect/#devices uniapp单位适配 根路径下 postcss.config.js 需要装这些插件 “postcss”: “^8.5.…...
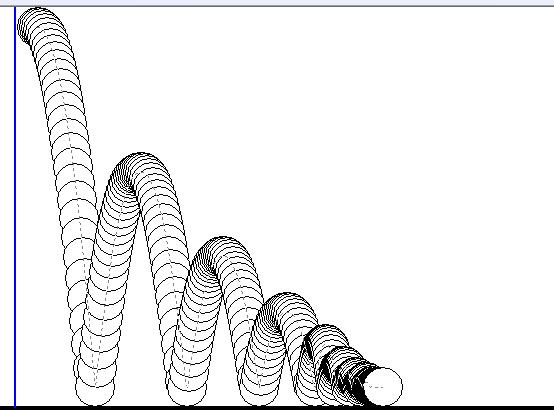
MFC 抛体运动模拟:常见问题解决与界面美化
在 MFC 中开发抛体运动模拟程序时,我们常遇到 轨迹残留、无效刷新、视觉单调、物理逻辑瑕疵 等问题。本文将针对这些痛点,详细解析原因并提供解决方案,同时兼顾界面美化,让模拟效果更专业、更高效。 问题一:历史轨迹与小球残影残留 现象 小球运动后,历史位置的 “残影”…...
STM32---外部32.768K晶振(LSE)无法起振问题
晶振是否起振主要就检查两个1、晶振与MCU是否兼容;2、晶振的负载电容是否匹配 目录 一、判断晶振与MCU是否兼容 二、判断负载电容是否匹配 1. 晶振负载电容(CL)与匹配电容(CL1、CL2)的关系 2. 如何选择 CL1 和 CL…...

wpf在image控件上快速显示内存图像
wpf在image控件上快速显示内存图像https://www.cnblogs.com/haodafeng/p/10431387.html 如果你在寻找能够快速在image控件刷新大图像(比如分辨率3000*3000的图像)的办法,尤其是想把内存中的裸数据(只有图像的数据,不包…...