基于和声算法的无人机航迹规划-附代码
基于和声算法的无人机航迹规划
文章目录
- 基于和声算法的无人机航迹规划
- 1.和声搜索算法
- 2.无人机飞行环境建模
- 3.无人机航迹规划建模
- 4.实验结果
- 4.1地图创建
- 4.2 航迹规划
- 5.参考文献
- 6.Matlab代码
摘要:本文主要介绍利用和声算法来优化无人机航迹规划。
1.和声搜索算法
和声算法原理请参考:https://blog.csdn.net/u011835903/article/details/118724731
2.无人机飞行环境建模
? 环境模型的建立是考验无人机是否可以圆满完成人类所赋予各项任务的基
础和前提,其中第一步便是如何描述规划空间中的障碍物。首先我们将采取函数模拟法模拟地貌特征。其函数表达式为:
z ( x , y ) = s i n ( y + a ) + b s i n ( x ) + c c o s ( d y 2 + x 2 ) + e c o s ( y ) + f s i n ( f y 2 + x 2 ) + g c o s ( y ) (1) z(x,y)=sin(y+a)+bsin(x)+ccos(d\sqrt{y^2+x^2})+ecos(y)+fsin(f\sqrt{y^2+x^2})+gcos(y)\tag{1} z(x,y)=sin(y+a)+bsin(x)+ccos(dy2+x2)+ecos(y)+fsin(fy2+x2)+gcos(y)(1)
其中, ( x , y ) (x, y) (x,y) 为地形上某点投影在水平面上的点坐标, z z z 则为对应点坐标的高度。式中 a , b , c , d , e , f , g a, b, c, d, e, f , g a,b,c,d,e,f,g 是常系数,想要得到不同的地貌特征可以通过改变其常系数的大小,以上建模是作为环境模型的基准地形信息。但为了得到障碍区域我们还需要在这个基准地形上叠加山峰模型,这样就可以模拟像山峰、丘陵等障碍地理信息。山峰模型的数学表达式为:
h ( x , y ) = ∑ i h i e x p [ − ( x − x o i ) 2 a i 2 − ( y − y o i ) 2 b i 2 ] + h o (2) h(x,y)=\sum_ih_iexp[-\frac{(x-x_{oi})^2}{a_i^2}-\frac{(y-y_{oi})^2}{b_i^2}]+h_o \tag{2} h(x,y)=i∑hiexp[−ai2(x−xoi)2−bi2(y−yoi)2]+ho(2)
式 (2)中, h o h_o ho 和 h i h_i hi 分别表示基准地形和第 i i i座山峰的高度, ( x o i , y o i ) (xoi , y oi ) (xoi,yoi)则表示第 i座山峰的中心坐标位置,a i 和 b i 分别是第 i 座山峰沿 x 轴和 y 轴方向的坡度。由式(1)和(2),我们可以得到如下表达式:
Z ( x , y ) = m a x [ z ( x , y ) , h ( x , y ) ] (3) Z(x,y)=max[z(x,y),h(x,y)]\tag{3} Z(x,y)=max[z(x,y),h(x,y)](3)
无人机在躲避障碍物的同时也会经常遇到具有威胁飞行安全的区域,我们称之为威胁区域。这些威胁区域可以是敌人的雷达和防空导弹系统的探测威胁区域也可以是一些其它的威胁,一旦无人机进入这些区域很有可能会被击落或者坠毁。为了简化模型,本文采用半径为 r 的圆柱形区域表示威胁区域,其半径的大小决定威胁区域的覆盖范围。每一个圆柱体的中心位置是对无人机构成最大威胁的地方并向外依次减弱。
3.无人机航迹规划建模
? 在环境建模的基础上,无人机航迹规划需要考虑到在执行复杂任务的过程中自身性能约束要求,合理的设计航迹评价函数才能使得和声搜索算法得出的最后结果符合要求,并保证规划出的航迹是有效的。考虑到实际环境中,无人机需要不断适应变化的环境。所以在无人机路径规划过程中,最优路径会显得比较复杂,并包含许多不同的特征。基于实际的情况,本文采用较为复杂的航迹评价函数进行无人机路径规划。影响无人机性能的指标主要包括航迹长度、飞行高度、最小步长、转角代价、最大爬升角等。
? 搜索最佳路径通常与搜索最短路径是密不可分的。在无人机航迹规划过程中,航迹的长度对于大多数航迹规划任务来说也是非常重要的。众所周知,较短的路线可以节省更多的燃料和更多的时间并且发现未知威胁的几率会更低。我们一般把路径定义为无人机从起始点到终点所飞行路程的值,设一条完整的航线有 n n n个节点,其中第 i i i个航路点和第 i + 1 i+1 i+1个航路点之间的距离表示为 l i l_i li ,这两个航路点的坐标分别表示为 ( x i , y i , z i ) (x_i,y_i,z_i ) (xi,yi,zi), ( x i + 1 , y i + 1 , z i + 1 ) (x_{i+1}, y_{i+1},z_{i+1}) (xi+1,yi+1,zi+1)并分别记作 g ( i ) g(i) g(i)和 g ( i + 1 ) g(i+1) g(i+1)。航迹需要满足如下条件:
{ l i = ∣ ∣ g ( i + 1 ) − g ( i ) ∣ ∣ 2 L p a t h = ∑ i = 1 n − 1 l i (4) \begin{cases} l_i = ||g(i+1)-g(i)||_2\\ L_{path}=\sum_{i=1}^{n-1}l_i \end{cases}\tag{4} {li=∣∣g(i+1)−g(i)∣∣2Lpath=∑i=1n−1li(4)
在飞行的过程中会遇到障碍物或者进入威胁区域,如果无人机无法躲避障碍物或者飞入了威胁区域将面临被击落或坠毁的危险以至于无法到达终点,记为 L p a t h = ∞ L_{path}=\infty Lpath=∞,但是无穷函数在实际问题中很难表示,我们采用惩罚的方式进行处理。一般情况下,为了利用地形覆盖自身位置,无人机应尽可能降低高度这可以帮助自身避免一些未知雷达等威胁。但是太低的飞行高度同样会加大无人机同山体和地面的撞击几率,因此设定稳定的飞行高度是非常重要的。飞行高度不应该有太大的变化,稳定的飞行高度可以减少控制系统的负担,节省更多的燃料 。为了使无人机飞行更加安全,给出的飞行高度模型:
{ h h e i g h t = 1 n ∑ i = 0 n − 1 ( z ( i ) − z ‾ ) 2 z ‾ = 1 n ∑ i = 0 n − 1 z ( i ) (5) \begin{cases} h_{height}=\sqrt{\frac{1}{n}\sum_{i=0}^{n-1}(z(i)-\overline{z})^2}\\ \overline{z}=\frac{1}{n}\sum_{i=0}^{n-1}z(i) \end{cases}\tag{5} {hheight=n1∑i=0n−1(z(i)−z)2z=n1∑i=0n−1z(i)(5)
无人机的可操作性也受到其转角代价函数的限制。,在飞行过程中无人机的转角应不大于其预先设定的最大转角,转角的大小会影响其飞行的稳定性。本文的研究中,设定最大转角为 Φ Φ Φ,当前转角为 θ \theta θ并且 a i a_i ai是第 i i i段航路段向量。
{ c o s θ = a i T a i + 1 ∣ a i ∣ ∣ a i + 1 ∣ J t u r n = ∑ i = 1 n ( c o s ( Φ − c o s θ ) ) (6) \begin{cases} cos\theta =\frac{a_i^Ta_{i+1}}{|a_i||a_{i+1}|}\\ J_{turn}=\sum_{i=1}^n(cos(\Phi-cos\theta)) \end{cases}\tag{6} {cosθ=∣ai∣∣ai+1∣aiTai+1Jturn=∑i=1n(cos(Φ−cosθ))(6)
其中, ∣ a ∣ |a| ∣a∣代表矢量 a a a的长度。
? 通过对以上三个方面建立了无人机航迹规划的代价函数,可以得出本文的航迹评价函数如下:
J c o s t = w 1 L p a t h + w 2 h h e i g h t + w 3 J t u r n (7) J_{cost}=w_1L_{path}+w_2h_{height}+w_3J_{turn} \tag{7} Jcost=w1Lpath+w2hheight+w3Jturn(7)
其中, J c o s t J_{cost} Jcost是总的代价函数,参数 w i w_i wi , i = 1 , 2 , 3 i=1,2,3 i=1,2,3 表示每个代价函数的权值,且满足如下条件:
{ w i ≥ 0 ∑ i = 1 3 w i = 1 (8) \begin{cases} w_i\geq0 \\ \sum_{i=1}^3 w_i=1 \end{cases} \tag{8} {wi≥0∑i=13wi=1(8)
通过对总的代价函数进行有效地处理,我们可以得到由线段组成的航迹。不可否认的是得到的路径往往是仅在理论上可行,但为了实际可飞,有必要对航迹进行平滑处理。本文采用三次样条插值的方法对路径进行平滑。
4.实验结果
4.1地图创建
设置地图参数a, b, c, d, e, f , g=1。地图大小为:200*200。设置三个山峰,山峰信息如表1所示。威胁区域信息如表2所示
| 信息 | 山峰中心坐标 | 山峰高度 | 山峰X方向坡度 | 山峰y方向坡度 |
|---|---|---|---|---|
| 山峰1 | [60,60] | 50 | 20 | 20 |
| 山峰2 | [100,100] | 60 | 30 | 30 |
| 山峰3 | [150,150] | 80 | 20 | 20 |
| 信息 | 威胁区域中心坐标 | 威胁区域半径 |
|---|---|---|
| 威胁区域1 | [150,50] | 30 |
| 威胁区域2 | [50,150] | 20 |
创建的地图如下:

4.2 航迹规划
设置起点坐标为[0,0,20],终点坐标为[200,200,20]。利用和声算法对航迹评价函数式(7)进行优化。优化结果如下:


从结果来看,和声算法规划出了一条比较好的路径,表明算法具有一定的优势。
5.参考文献
[1]薛建凯. 一种新型的群智能优化技术的研究与应用[D].东华大学,2020.DOI:10.27012/d.cnki.gdhuu.2020.000178.
6.Matlab代码
相关文章:
基于和声算法的无人机航迹规划-附代码
基于和声算法的无人机航迹规划 文章目录 基于和声算法的无人机航迹规划1.和声搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用和声算法来优化无人机航迹规划。 1.和声搜索算法 …...

[Linux]线程池
[Linux]线程池 文章目录 [Linux]线程池线程池的概念线程池的优点线程池的应用场景线程池的实现 线程池的概念 线程池是一种线程使用模式。线程池是一种特殊的生产消费模型,用户作为生产者,线程池作为消费者和缓冲区。 线程过多会带来调度开销,…...

使用es实现轻量级分布式锁
文章目录 [toc] 1.前言2.实现3.总结 1.前言 一般来说,实现分布式锁的方式有哪几种? 一:Redisson实现 二:ZK实现 这两种实现网上的实现是千篇一律,在本文就不做过多的讲解了 其它方式好像没有了,真的是这…...

富文本编辑器特殊字符的解码编码
var HtmlUtil {/*1.用浏览器内部转换器实现html转码*/htmlEncode:function (html){//1.首先动态创建一个容器标签元素,如DIVvar temp document.createElement ("div");//2.然后将要转换的字符串设置为这个元素的innerText(ie支持)或者textContent(火狐&…...

几种软件开发方法对比
几种软件开发方法对比 1 综述 软件开发方法是一种使用早已定义好的技术集及符号表示习惯来组织软件生产的过程。 本文对净室方法、结构化方法、面向对象方法、原型法、逆向工程等方法进行梳理,并对各种开发方法特点、优点进行对比。 2 净室方法 2.1 特点 净…...
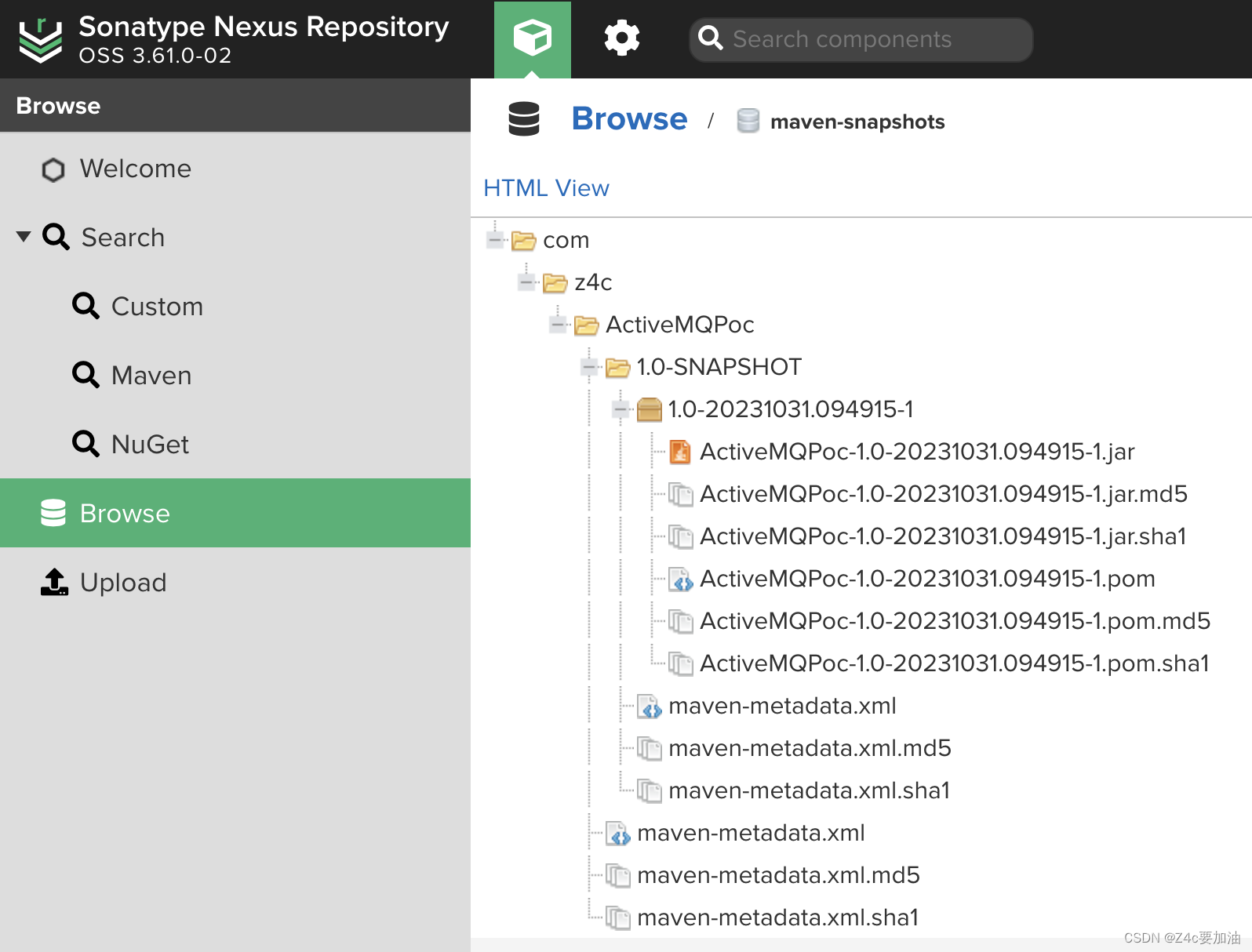
在Maven中发布项目到Nexus私有服务器
一、测试环境 Sonatype Nexus 3.61.0-02 Maven 3.9.2 二、环境配置 2.1找到maven的配置文件 2.2添加私有仓库账户密码 <servers><server><id>nexus</id><username>admin</username><password>admin</password></server&…...

TypeScript - 类 -类的继承
浅谈类的继承 类的继承 就是对一个类进行扩展,可以扩展属性、方法。 类的继承 可以很好的解决代码冗余的问题。比如 : 【学生】类 拥有 基本的 姓名、年龄 两个属性, 【体育生】类也属于【学生】类,有 姓名、年龄、训练项目 三个…...

QT: QLineEdit 密码模式、QLineEdit输入模式
setEchoMode(QLineEdit::Normal) 是一个函数,用于设置 QLineEdit 对象的输入模式。具体用法如下: lineEdit->setEchoMode(QLineEdit::Normal);该函数的作用是将 QLineEdit 对象的输入模式设置为“正常模式”,在此模式下,用户的…...

ES6中Map集合
Map集合是一个新的数据结构,它可以存储键值对,并且可以使用任何类型的值作为键,包括对象、数组和函数。Map也是一种可迭代的结构,可以使用for...of循环遍历。 在ES6中,我们可以使用Map构造函数来创建一个Map集合&…...

【Leetcode Sheet】Weekly Practice 13
Leetcode Test 1155 掷骰子等于目标和的方法数(10.24) 这里有 n 个一样的骰子,每个骰子上都有 k 个面,分别标号为 1 到 k 。 给定三个整数 n , k 和 target ,返回可能的方式(从总共 kn 种方式中)滚动骰子的数量,使正面朝上的数…...

技术贴 | 一文掌握 Google Test 框架
一、简介 1. 引言 在开发过程中,如何保证代码的质量以及程序的正确性成为了我们亟需解决的问题,其中测试用例成为了不必可少的一部分。测试用例不仅可以帮助我们验证代码的正确性,还能帮助我们捕获潜在的错误,提高代码的可靠性和…...
基于深度学习的中文情感分类 - 卷积神经网络 情感分类 情感分析 情感识别 评论情感分类 计算机竞赛
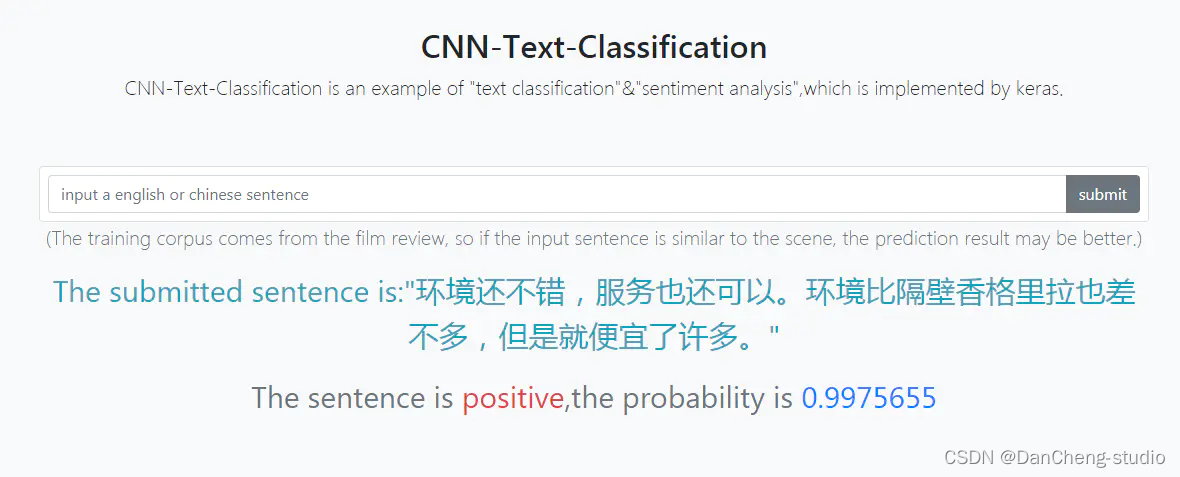
文章目录 1 前言2 情感文本分类2.1 参考论文2.2 输入层2.3 第一层卷积层:2.4 池化层:2.5 全连接softmax层:2.6 训练方案 3 实现3.1 sentence部分3.2 filters部分3.3 featuremaps部分3.4 1max部分3.5 concat1max部分3.6 关键代码 4 实现效果4.…...

非线性时滞系统的无模型预测控制
摘 要 非线性时滞系统的预测控制应用广泛,比如电子设备、石油化工、造纸等行业,都会运用到非线性时滞系统的预测控制系统或工具。更高效率和更高精度的非线性时滞系统的预测控制一直是研究的热点。在我们日常生活中,非线性时滞系统的预测控制…...

局域网内两台电脑共享文件夹(通过网线直连共享数据)
文章目录 2.设置共享文件夹3.访问共享文件夹 1.将两台电脑置于同一局域网下 用网线将两台电脑连接关闭两台电脑防火墙将两台电脑IP地址设置在同一局域网下 测试是否在同一局域网下,使用ping命令 ping 192.168.0.122.设置共享文件夹 选择想要共享的文件夹ÿ…...
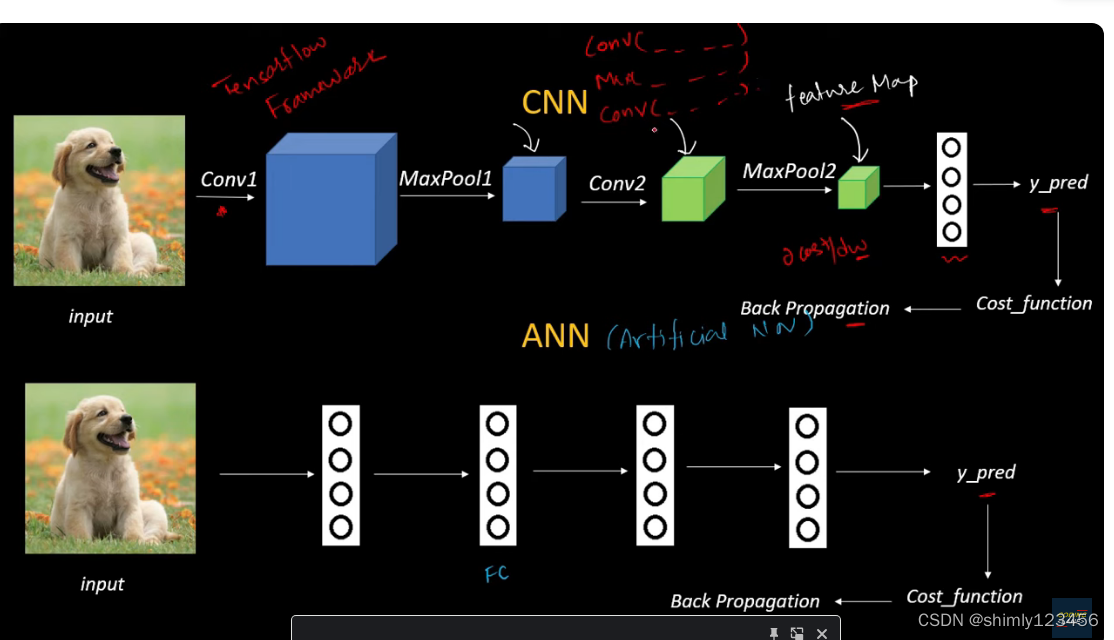
什么是 CNN? 卷积神经网络? 怎么用 CNN 进行分类?(3)
参考视频:https://www.youtube.com/watch?vE5Z7FQp7AQQ&listPLuhqtP7jdD8CD6rOWy20INGM44kULvrHu 视频7:CNN 的全局架构 卷积层除了做卷积操作外,还要加上 bias ,再经过非线性的函数,这么做的原因是 “scaled p…...

一致性hash负载均衡
Hash算法的问题 今天看下一致性hash,常见的负载均衡可能使用过hash,比如nginx中,如果使用session最简单就是通过hash,比如根据用户的请求ip进行hash,让不同用户的请求打到同一台服务器,这样状态处理起来最…...

MAC下安装Python
MAC基本信息: 执行命令: brew install cmake protobuf rust python3.10 git wget 遇到以下问题: > Downloading https://mirrors.aliyun.com/homebrew/homebrew-bottles/rust-1.59.0 Already downloaded: /Users/xxxx/Library/Caches/Ho…...

Android NDK开发详解之JNI中的库文件
Android NDK开发详解之JNI中的库文件 简介工作原理流程原生 activity 和应用 简介 本部分简要介绍了 NDK 的工作原理。Android NDK 是一组使您能将 C 或 C(“原生代码”)嵌入到 Android 应用中的工具。能够在 Android 应用中使用原生代码对于想执行以下…...
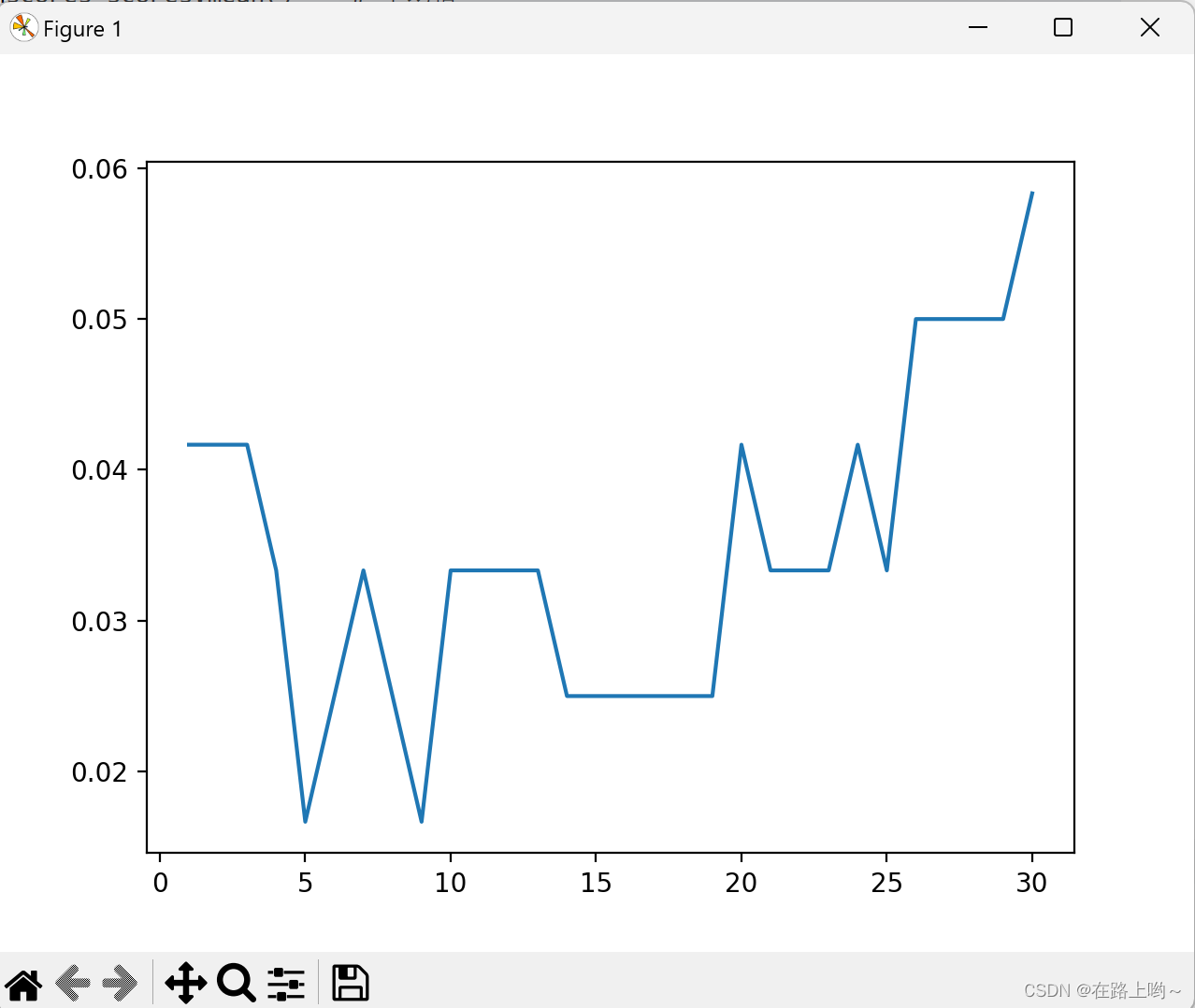
KNN模型
使用K-Nearest Neighbors (KNN)算法进行分类。首先加载一个数据集,然后进行预处理,选择最佳的K值,并训练一个KNN模型。 # encodingutf-8 import numpy as np datas np.loadtxt(datingTestSet2.txt) # 加载数据集,返回一个numpy数…...
Python 学习1 基础
文章目录 基础字符串字面量常用的值类型注释变量print语句数据类型数据类型转换标识符运算符 字符串拓展小结 2023.10.28 周六 最近打算学一下Python,毕竟确实简单方便,而且那个编程语言排名还是在第一。不过不打算靠它吃饭,深不深入暂且不说…...

React可访问性开发:如何构建符合A11y标准的React组件
React可访问性开发:如何构建符合A11y标准的React组件 【免费下载链接】react-faq A collection of links to help answer your questions about React.js 项目地址: https://gitcode.com/gh_mirrors/re/react-faq React作为现代前端开发的主流框架࿰…...
)
linux内核源码内存管理(7)
一、 引言:冲破冯诺依曼瓶颈的壁障在传统的单处理器(UMA,Uniform Memory Access)架构中,所有CPU核心通过同一条总线平等地访问所有内存。这种对称性带来了编程模型的简洁,但也埋下了致命的可扩展性陷阱&…...

黑苹果配置神器Hackintool:从新手到高手的完整指南
黑苹果配置神器Hackintool:从新手到高手的完整指南 【免费下载链接】Hackintool The Swiss army knife of vanilla Hackintoshing 项目地址: https://gitcode.com/gh_mirrors/ha/Hackintool Hackintool被誉为"黑苹果瑞士军刀",是配置和…...

深入解析Roll:轻量级滚动动画库的设计原理与工程实践
1. 项目概述:一个轻量级、可扩展的滚动动画库在Web前端开发中,滚动动画(Scroll Animation)早已不是新鲜概念。从早期简单的视差效果,到如今复杂的元素交互动画,滚动动画已经成为提升用户体验、增强页面叙事…...

基于CircuitPython与YouTube API的智能直播状态指示器制作指南
1. 项目概述与核心价值 如果你是一个内容创作者,或者你关注的某个频道正在直播,一个醒目、酷炫的“ON AIR”指示灯绝对能瞬间提升氛围感。今天要聊的这个项目,就是基于CircuitPython和YouTube API,自己动手打造一个能自动感知直播…...

5分钟快速上手Figma中文界面:设计师必备的终极汉化插件指南
5分钟快速上手Figma中文界面:设计师必备的终极汉化插件指南 【免费下载链接】figmaCN 中文 Figma 插件,设计师人工翻译校验 项目地址: https://gitcode.com/gh_mirrors/fi/figmaCN 还在为Figma全英文界面而苦恼吗?FigmaCN中文插件是你…...

番茄小说下载器:5种格式+Web界面打造你的私人数字图书馆终极指南
番茄小说下载器:5种格式Web界面打造你的私人数字图书馆终极指南 【免费下载链接】fanqienovel-downloader 下载番茄小说 项目地址: https://gitcode.com/gh_mirrors/fa/fanqienovel-downloader 你是否曾因网络信号不佳而被迫中断精彩的小说阅读?是…...

基于Vite与原生JS构建现代化个人站点导航器
1. 项目概述:一个现代站点导航器的诞生最近在整理自己的浏览器书签和常用工具链接时,我又一次陷入了混乱。收藏夹里塞满了各种项目文档、在线工具、技术博客和设计资源,每次想找一个特定的网站,都得在层层文件夹里翻找半天。这让我…...

C#面向对象封装详解:从字段到属性,为什么要用属性?
封装详解:从字段到属性1. 什么是封装封装是指隐藏类的内部实现细节,仅对外提供安全的访问接口,通过控制数据的读写操作来确保数据安全性。其核心目的是保护类中重要的内部数据。2. 字段直接暴露的问题当直接使用字段而不定义属性时࿰…...

从鱼眼到广角:相机畸变公式的实战拆解与参数调优
1. 相机畸变:从鱼眼到广角的视觉魔法 第一次用鱼眼镜头拍照片时,我被画面边缘夸张的弯曲效果震撼到了——直线变成了弧线,方形门框变成了圆润的拱门。这种"变形魔法"其实就是相机畸变最直观的体现。作为算法工程师,我花…...