自学SLAM(6)相机与图像实践:OpenCV处理图像与图像拼接(点云)
前言
如果写过SLAM14讲第一次的作业,或者看过我之前的运行ORB_SLAM2教程应该都安装过OpenCV了,如果没有安装,没关系,可以看我之前的博客,里面有如何安装OpenCV。
链接: 运行ORB-SLAM2(含OpenCV的安装)
文章目录
- 前言
- 1.OpenCV的图像操作
- 2.使用OpenCV进行RGB-D图像拼接(点云)
1.OpenCV的图像操作
让我们先来看一段代码,学习一下OpenCV的函数调用。
改代码中,演示了如下几个操作:图像读取,显示,像素遍历,复制,赋值等。大部分的注解已经写在代码中。编译该程序时,需要在CMakeLists.txt中添加OpenCV的头文件,然后将程序链接到库文件上。
imageBasics.cpp:
#include <iostream>
#include <chrono>
using namespace std;#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>int main ( int argc, char** argv )
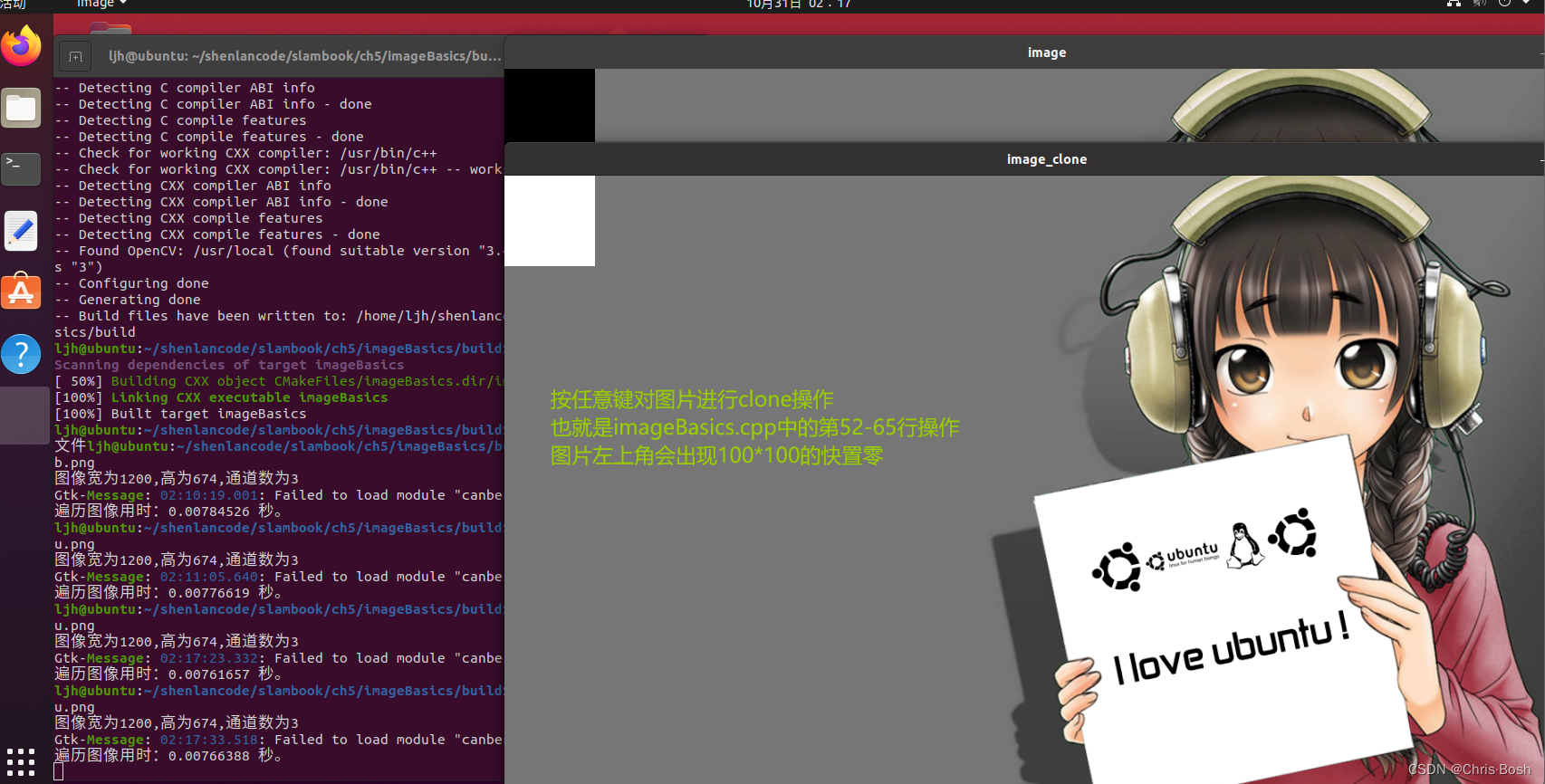
{// 读取argv[1]指定的图像cv::Mat image;image = cv::imread ( argv[1] ); //cv::imread函数读取指定路径下的图像// 判断图像文件是否正确读取if ( image.data == nullptr ) //数据不存在,可能是文件不存在{cerr<<"文件"<<argv[1]<<"不存在."<<endl;return 0;}// 文件顺利读取, 首先输出一些基本信息cout<<"图像宽为"<<image.cols<<",高为"<<image.rows<<",通道数为"<<image.channels()<<endl;cv::imshow ( "image", image ); // 用cv::imshow显示图像cv::waitKey ( 0 ); // 暂停程序,等待一个按键输入// 判断image的类型if ( image.type() != CV_8UC1 && image.type() != CV_8UC3 ){// 图像类型不符合要求cout<<"请输入一张彩色图或灰度图."<<endl;return 0;}// 遍历图像, 请注意以下遍历方式亦可使用于随机像素访问// 使用 std::chrono 来给算法计时chrono::steady_clock::time_point t1 = chrono::steady_clock::now();for ( size_t y=0; y<image.rows; y++ ){// 用cv::Mat::ptr获得图像的行指针unsigned char* row_ptr = image.ptr<unsigned char> ( y ); // row_ptr是第y行的头指针for ( size_t x=0; x<image.cols; x++ ){// 访问位于 x,y 处的像素unsigned char* data_ptr = &row_ptr[ x*image.channels() ]; // data_ptr 指向待访问的像素数据// 输出该像素的每个通道,如果是灰度图就只有一个通道for ( int c = 0; c != image.channels(); c++ ){unsigned char data = data_ptr[c]; // data为I(x,y)第c个通道的值}}}chrono::steady_clock::time_point t2 = chrono::steady_clock::now();chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>( t2-t1 );cout<<"遍历图像用时:"<<time_used.count()<<" 秒。"<<endl;// 关于 cv::Mat 的拷贝// 直接赋值并不会拷贝数据cv::Mat image_another = image;// 修改 image_another 会导致 image 发生变化image_another ( cv::Rect ( 0,0,100,100 ) ).setTo ( 0 ); // 将左上角100*100的块置零cv::imshow ( "image", image );cv::waitKey ( 0 );// 使用clone函数来拷贝数据cv::Mat image_clone = image.clone();image_clone ( cv::Rect ( 0,0,100,100 ) ).setTo ( 255 );cv::imshow ( "image", image );cv::imshow ( "image_clone", image_clone );cv::waitKey ( 0 );// 对于图像还有很多基本的操作,如剪切,旋转,缩放等,限于篇幅就不一一介绍了,请参看OpenCV官方文档查询每个函数的调用方法.cv::destroyAllWindows();return 0;
}CMakeLists.txt:
cmake_minimum_required( VERSION 2.8 )
project( imageBasics )# 添加c++ 11标准支持
set( CMAKE_CXX_FLAGS "-std=c++11" )# 寻找OpenCV库
find_package( OpenCV 3 REQUIRED )
# 添加头文件
include_directories( ${OpenCV_INCLUDE_DIRS} )add_executable( imageBasics imageBasics.cpp )
# 链接OpenCV库
target_link_libraries( imageBasics ${OpenCV_LIBS} )
然后我们尝试使用OpenCV打开一张图片:

2.使用OpenCV进行RGB-D图像拼接(点云)
joinMap.cpp:
#include <iostream>
#include <fstream>
using namespace std;
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <Eigen/Geometry>
#include <boost/format.hpp> // for formating strings
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>int main( int argc, char** argv )
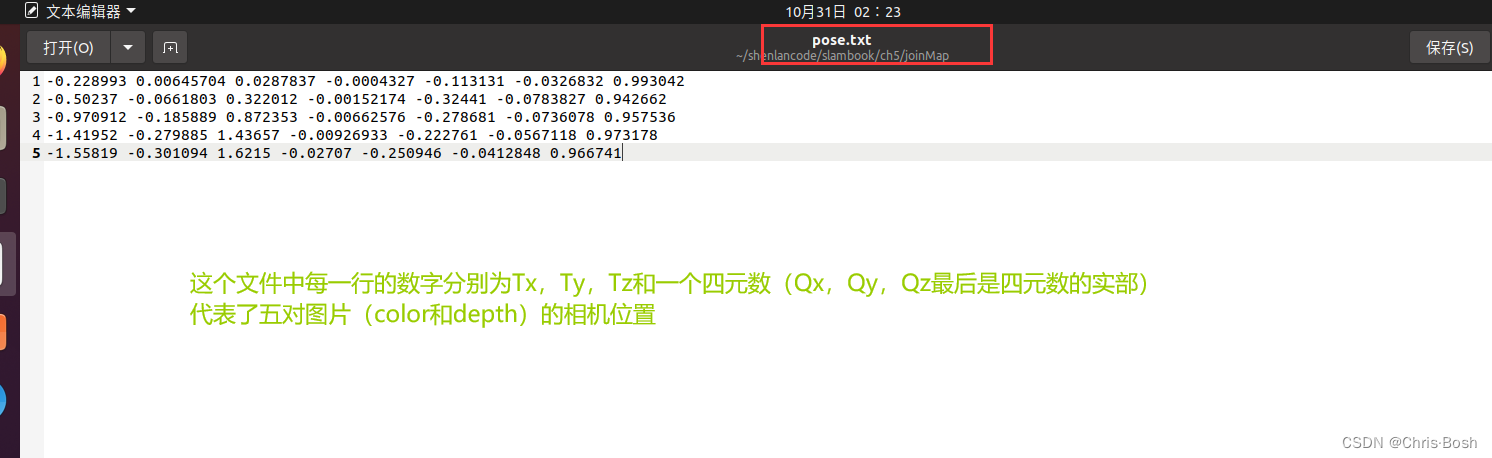
{vector<cv::Mat> colorImgs, depthImgs; // colorImgs:彩色图;depthImgs:深度图vector<Eigen::Isometry3d, Eigen::aligned_allocator<Eigen::Isometry3d>> poses; // 相机位姿//iftream的对象假设为fin,fin在读取数据的时候会根据你的输出对象来选择输出的方式。ifstream fin("./pose.txt");if (!fin){cerr<<"请在有pose.txt的目录下运行此程序"<<endl;return 1;}for ( int i=0; i<5; i++ ){boost::format fmt( "./%s/%d.%s" ); //图像文件格式colorImgs.push_back( cv::imread( (fmt%"color"%(i+1)%"png").str() ));/*cv::Mat img =cv::imread(argv[1],-1)函数原型Mat imread( const String& filename, int flags = IMREAD_COLOR );第一个参数是图片的绝对地址;第二个参数表示图片读入的方式(flags可以缺省,缺省时flags=1,表示以彩色图片方式读入图片);flags>0时表示以彩色方式读入图片;flags=0时表示以灰度图方式读入图片;flags<0时表示以图片的本来的格式读入图片;*/depthImgs.push_back( cv::imread( (fmt%"depth"%(i+1)%"pgm").str(), -1 )); // 使用-1读取原始图像double data[7] = {0};for ( auto& d:data )fin>>d; //将深度值文件一行一行读进d中Eigen::Quaterniond q( data[6], data[3], data[4], data[5] ); //旋转四元数Eigen::Isometry3d T(q);T.pretranslate( Eigen::Vector3d( data[0], data[1], data[2] )); //平移向量poses.push_back( T );}// 计算点云并拼接// 相机内参 double cx = 325.5;double cy = 253.5;double fx = 518.0;double fy = 519.0;double depthScale = 1000.0;cout<<"正在将图像转换为点云..."<<endl;// 定义点云使用的格式:这里用的是XYZRGBtypedef pcl::PointXYZRGB PointT; typedef pcl::PointCloud<PointT> PointCloud;// 新建一个点云PointCloud::Ptr pointCloud( new PointCloud ); for ( int i=0; i<5; i++ ){cout<<"转换图像中: "<<i+1<<endl; cv::Mat color = colorImgs[i]; //像素值 cv::Mat depth = depthImgs[i]; //每个像素值对应的深度值Eigen::Isometry3d T = poses[i]; //每张图片对应的位姿for ( int v=0; v<color.rows; v++ )for ( int u=0; u<color.cols; u++ ){unsigned int d = depth.ptr<unsigned short> ( v )[u]; // 深度值/*d==0:表示该像素点没有深度值(不可能),所以就抛弃该点,不再计算相机坐标系下的坐标值(X,Y,Z)*/if ( d==0 ) continue; // 为0表示没有测量到//point:相机坐标系下的坐标值(X,Y,Z)Eigen::Vector3d point; point[2] = double(d)/depthScale; point[0] = (u-cx)*point[2]/fx;point[1] = (v-cy)*point[2]/fy; // pointWorld:世界坐标Eigen::Vector3d pointWorld = T*point;// p:点云(每个点云按照[XYZRGB]的格式表示)PointT p ;p.x = pointWorld[0];p.y = pointWorld[1];p.z = pointWorld[2];p.b = color.data[ v*color.step+u*color.channels() ];p.g = color.data[ v*color.step+u*color.channels()+1 ];p.r = color.data[ v*color.step+u*color.channels()+2 ];pointCloud->points.push_back( p );}}pointCloud->is_dense = false;cout<<"点云共有"<<pointCloud->size()<<"个点."<<endl;pcl::io::savePCDFileBinary("map.pcd", *pointCloud );return 0;
}
CMakeLists.txt:
cmake_minimum_required( VERSION 2.8 )
project( joinMap )set( CMAKE_BUILD_TYPE Release )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )# opencv
find_package( OpenCV REQUIRED )
include_directories( ${OpenCV_INCLUDE_DIRS} )# eigen
include_directories( "/usr/include/eigen3/" )# pcl
find_package( PCL REQUIRED COMPONENT common io )
include_directories( ${PCL_INCLUDE_DIRS} )
add_definitions( ${PCL_DEFINITIONS} )add_executable( joinMap joinMap.cpp )
target_link_libraries( joinMap ${OpenCV_LIBS} ${PCL_LIBRARIES} )
这里点云我们用的是pcl的库,所以需要安装一些pcl的库
安装命令如下:
sudo apt-get install libpcl-dev
sudo apt-get install pcl-tools
然后就可以进行编译,进入我们创建的build文件夹
cmake ..
make
cd ..
build/joinMap
pcl_viewer map.pcd
点云图就出来了:
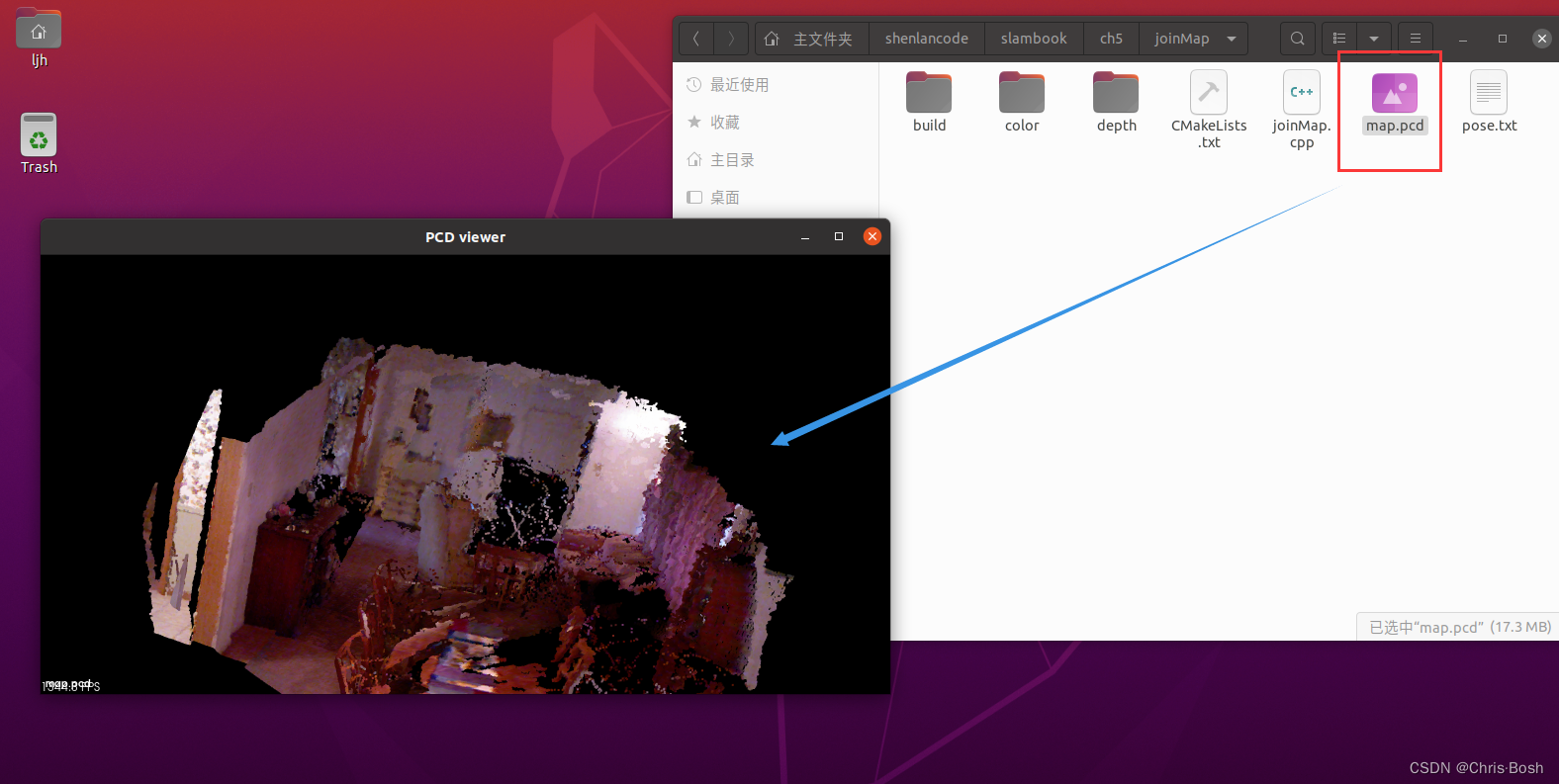
放大点云图:

相关文章:
自学SLAM(6)相机与图像实践:OpenCV处理图像与图像拼接(点云)
前言 如果写过SLAM14讲第一次的作业,或者看过我之前的运行ORB_SLAM2教程应该都安装过OpenCV了,如果没有安装,没关系,可以看我之前的博客,里面有如何安装OpenCV。 链接: 运行ORB-SLAM2(含OpenCV的安装&…...
伊朗网络间谍组织针对中东金融和政府部门
导语 近日,以色列网络安全公司Check Point与Sygnia发现了一起针对中东金融、政府、军事和电信部门的网络间谍活动。这一活动由伊朗国家情报和安全部门(MOIS)支持的威胁行为者发起,被称为"Scarred Manticore"。该组织被认…...
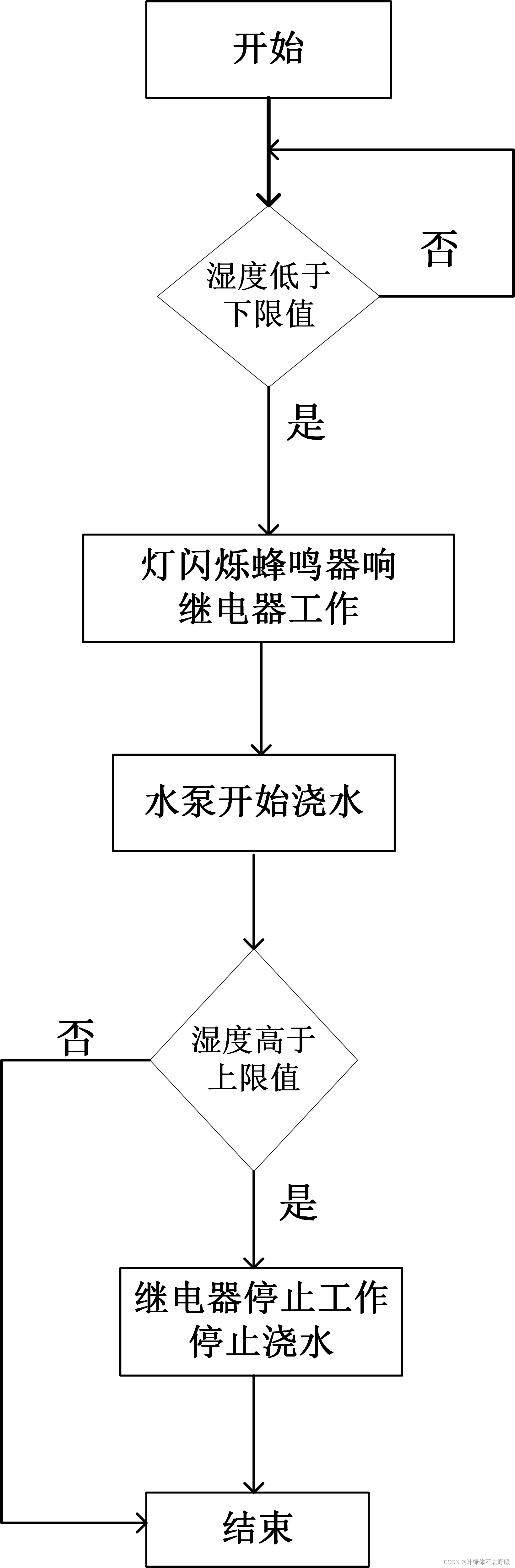
基于51单片机土壤湿度检测及自动浇花系统仿真(带时间显示)
wx供重浩:创享日记 对话框发送:单片机浇花 获取完整源码源文件仿真源文件原理图源文件论文报告等 单片机土壤湿度检测及自动浇花系统仿真(带时间显示) 具体功能: (1)液晶第一行显示实际湿度&am…...
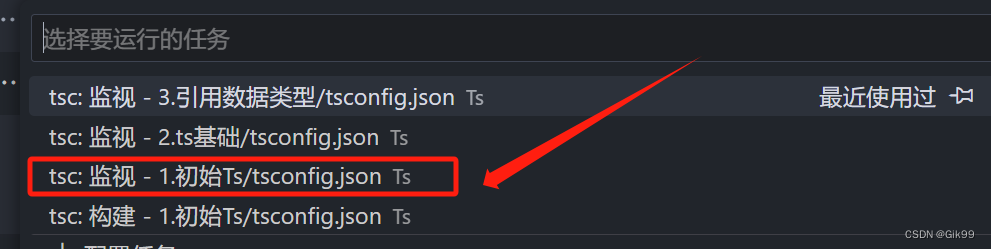
typeScript基础使用与进阶
typeScript基础使用与进阶 一、初始typeScript1.1 js的超集1.2 编译器编译为js代码1.3 完全兼容js1.4 静态类型检查器 二、ts的安装与编译2.1 ts的安装2.2 ts编译成js2.2.1 手动编译2.2.2 自动编译 三、ts基础使用3.1 类型声明3.1.1 基础类型3.1.2 数组3.1.3 对象3.1.4 any类型…...
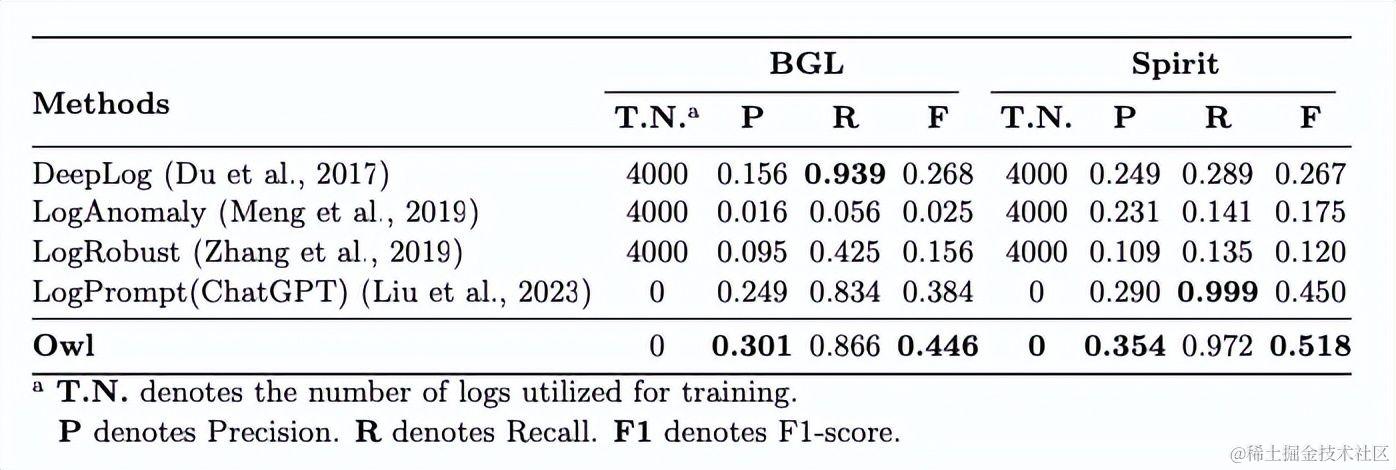
云智慧联合北航提出智能运维(AIOps)大语言模型及评测基准
随着各行业数字化转型需求的不断提高,人工智能、云计算、大数据等新技术的应用已不仅仅是一个趋势。各行业企业和组织纷纷投入大量资源,以满足日益挑剔的市场需求,追求可持续性和竞争力,这也让运维行业迎来了前所未有的挑战和机遇…...

高效处理异常值的算法:One-class SVM模型的自动化方案
一、引言 数据清洗和异常值处理在数据分析和机器学习任务中扮演着关键的角色。清洗数据可以提高数据质量,消除噪声和错误,从而确保后续分析和建模的准确性和可靠性。而异常值则可能对数据分析结果产生严重影响,导致误导性的结论和决策。因此&…...
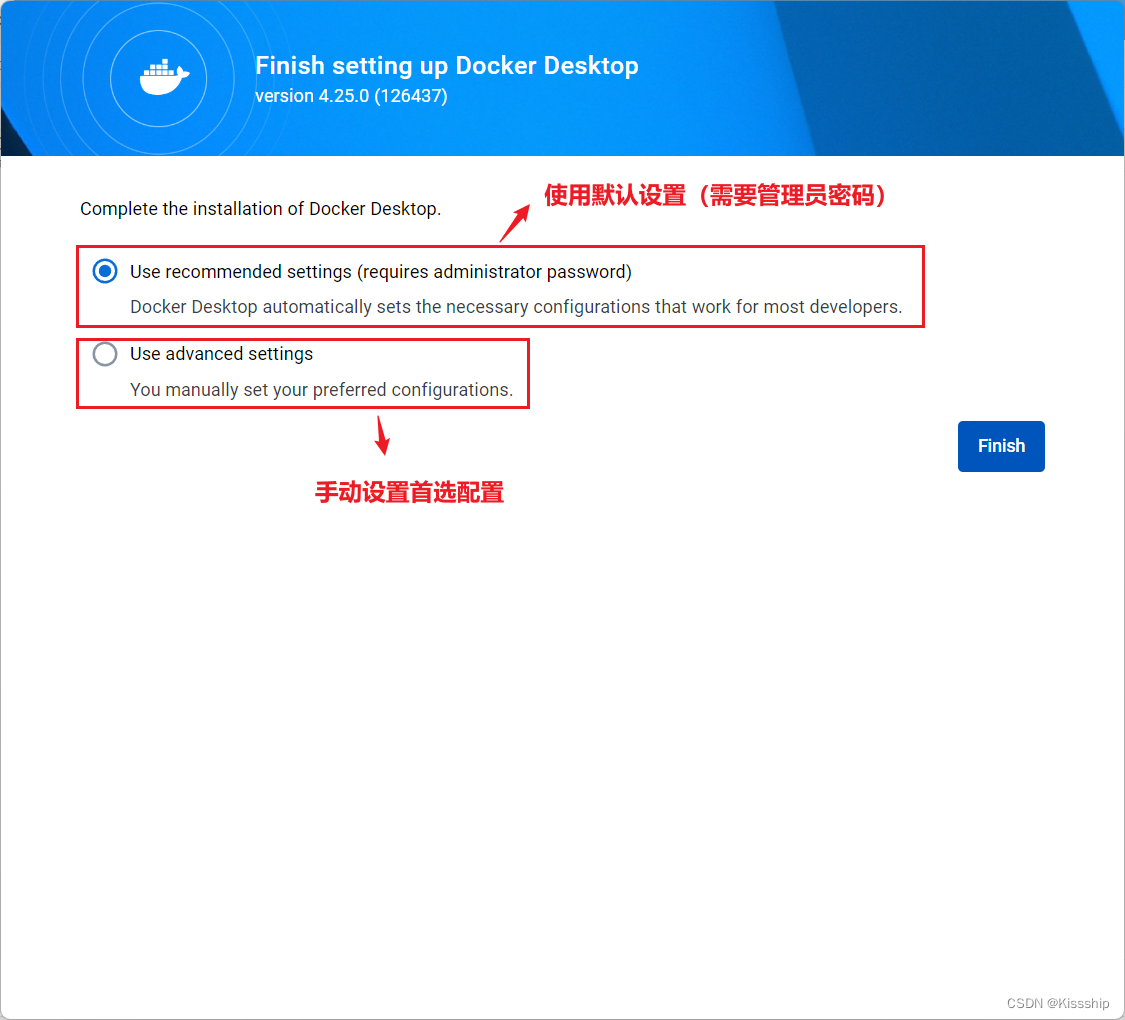
Docker DeskTop安装与启动(Windows版本)
一、官网下载Docker安装包 Docker官网如下: Docker官网不同操作系统下载页面https://docs.docker.com/desktop/install/windows-install/ 二、安装Docker DeskTop 2.1 双击 Docker Installer.exe 以运行安装程序 2.2 安装操作 默认勾选,具体操作如下…...
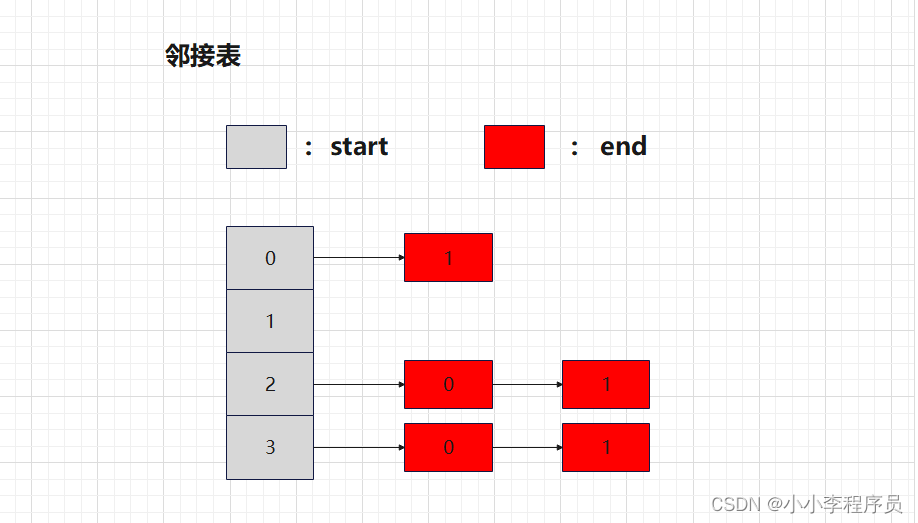
数据结构:邻接矩阵与邻接表
模型图 邻接矩阵 用于反应图中任意两点之间的关联,用二维数组表示比较方便 以行坐标为起点,列坐标为终点如果两个点之间有边,那么标记为绿色,如图: 适合表示稠密矩阵 邻接表 用一维数组 链表的形式表示ÿ…...
python PyQt5 MySQL GUI 学生信息管理系统
学生信息管理系统 本系统使用python,pyqt5,数据库使用MySQL,实现windowsGUI应用。 python使用pymysql模块操作数据库代码 import pymysqldef handle_db(cmd, sql):result None# print(f" sql {sql}")# 连接数据库conn pymysql…...

[SSD综述1.6] SSD固态硬盘参数图文解析_选购固态硬盘就像买衣服?
依公知及经验整理,原创保护,禁止转载。 专栏 《SSD入门到精通系列》 <<<< 返回总目录 <<<< 传统的 HDD 是“马达+磁头+磁盘”的机械结构,而 SSD 则是“闪存介质+主控”的纯半导体芯片存储结构,两者在数据存储介质和读写方式上有着本质区别,这…...
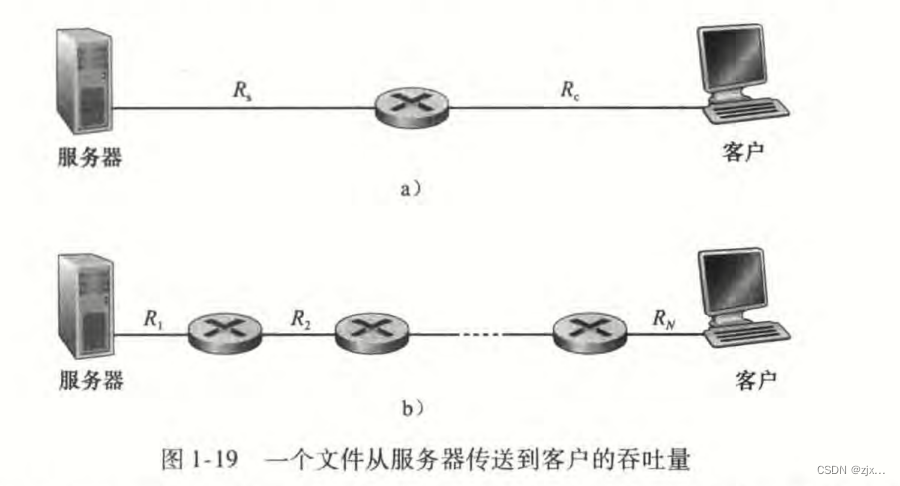
【计算机网络 - 自顶向下方法】第一章习题答案
P2 Question: 式 (1-1) 给出了经传输速率为 R 的 N 段链路发送长度为 L 的一个分组的端到端时延。 对于经过 N 段链路一个接一个地发送 P 个这样的分组,一般化地表示出这个公式。 Answer: N ∗ L R \frac{N*L}{R} RN∗L时&#x…...
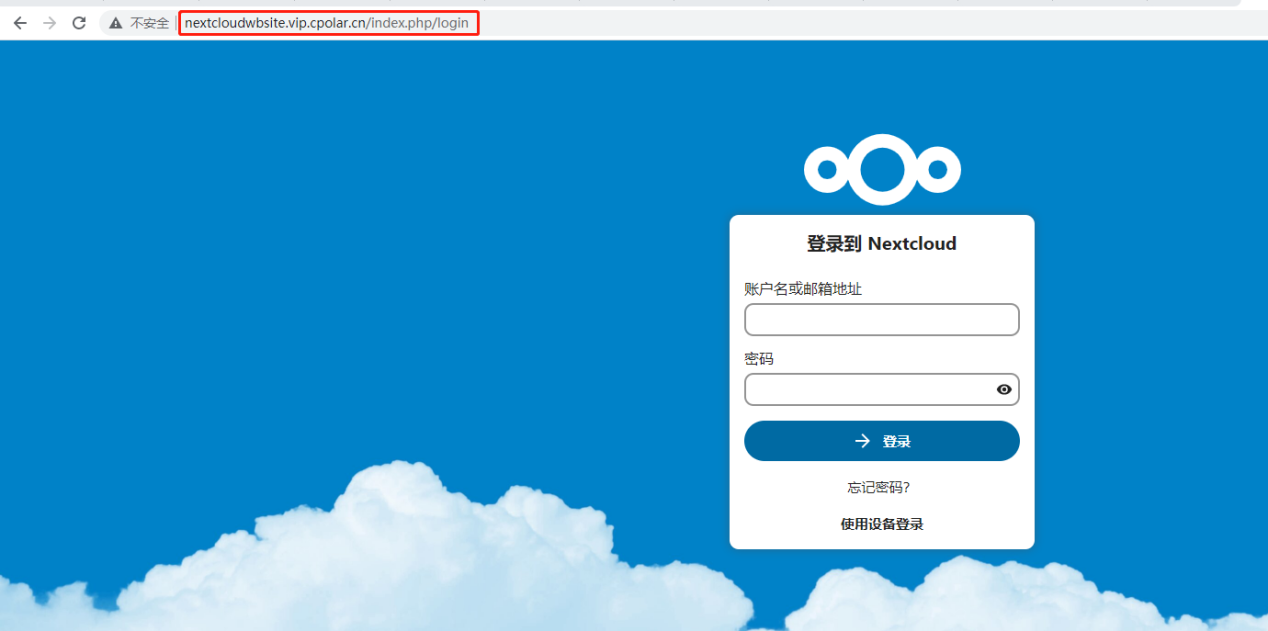
零基础搭建Nextcloud私有云盘并通过内网穿透实现远程访问
文章目录 摘要1. 环境搭建2. 测试局域网访问3. 内网穿透3.1 ubuntu本地安装cpolar3.2 创建隧道3.3 测试公网访问 4 配置固定http公网地址4.1 保留一个二级子域名4.1 配置固定二级子域名4.3 测试访问公网固定二级子域名 摘要 Nextcloud,它是ownCloud的一个分支,是一个文件共享服…...

element ui多选框编辑时无法选中的解决办法
<!--v-model绑定的值必须是[],不能是字符串--><el-form-item label"配布对象" prop"reptGroupArray" > <!--多选--><el-checkbox-group v-model"form.reptGroupArray" size"small" change"check…...
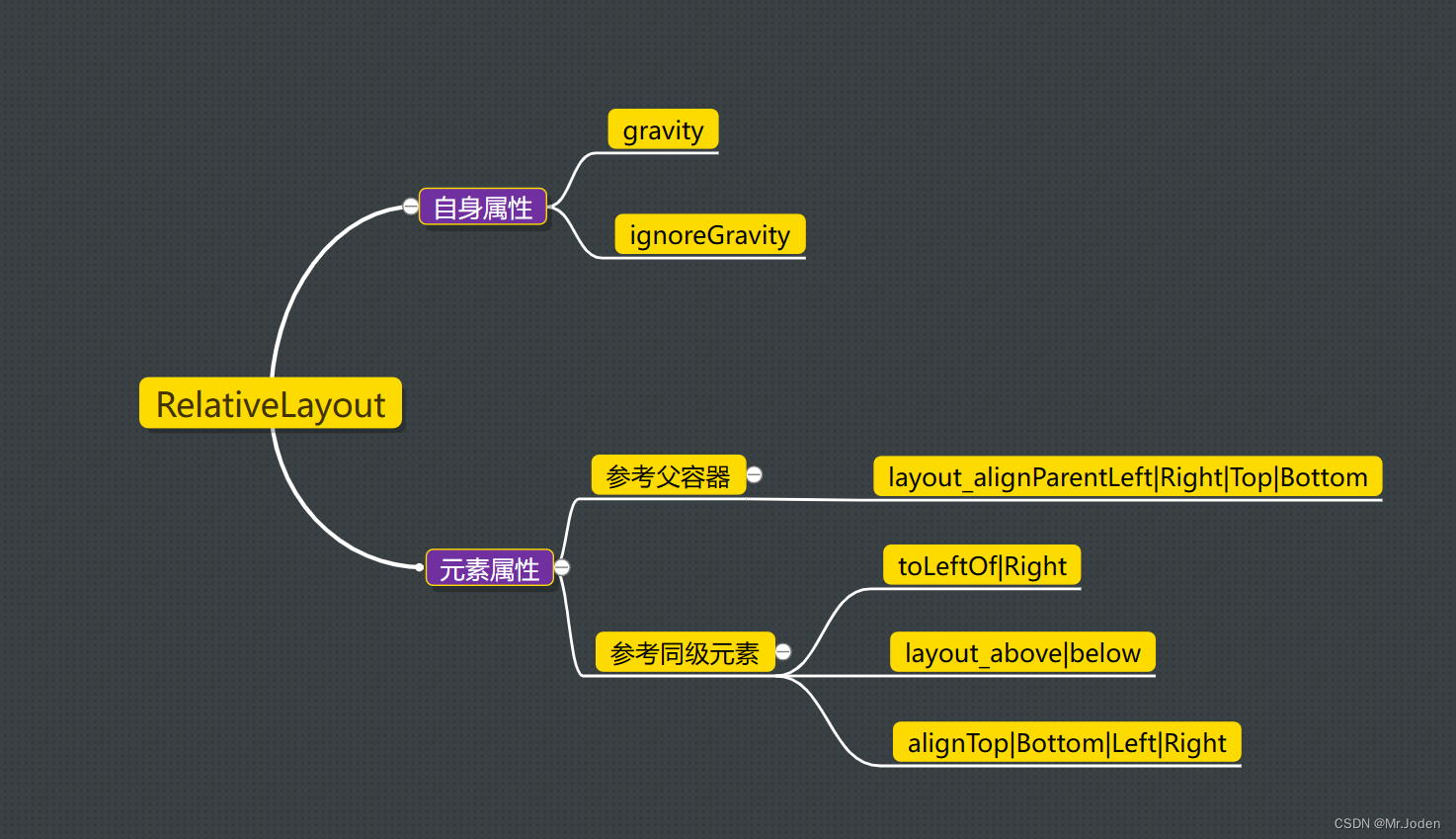
Android Studio布局
线性布局 水平或竖直排列子元素的布局容器 相对布局 可针对容器内每个子元素设置相对位置(相对于父容器或同级子元素的位置) 网格布局 找了下面这篇文章连接可以参考(不再赘述) GridLayout(网格布局) | 菜鸟教程 (runoob.com) …...
2.10 CSS BFC
1.简介 BFC是Block Formatting Context(块级格式上下文),可以理解成元素的一个“特异功能”。该“特异功能”,在默认的情况下处于关闭状态;当元素满足了某些条件后,该"特异功能被激活。所谓激活"特异功能”,专业点说就…...
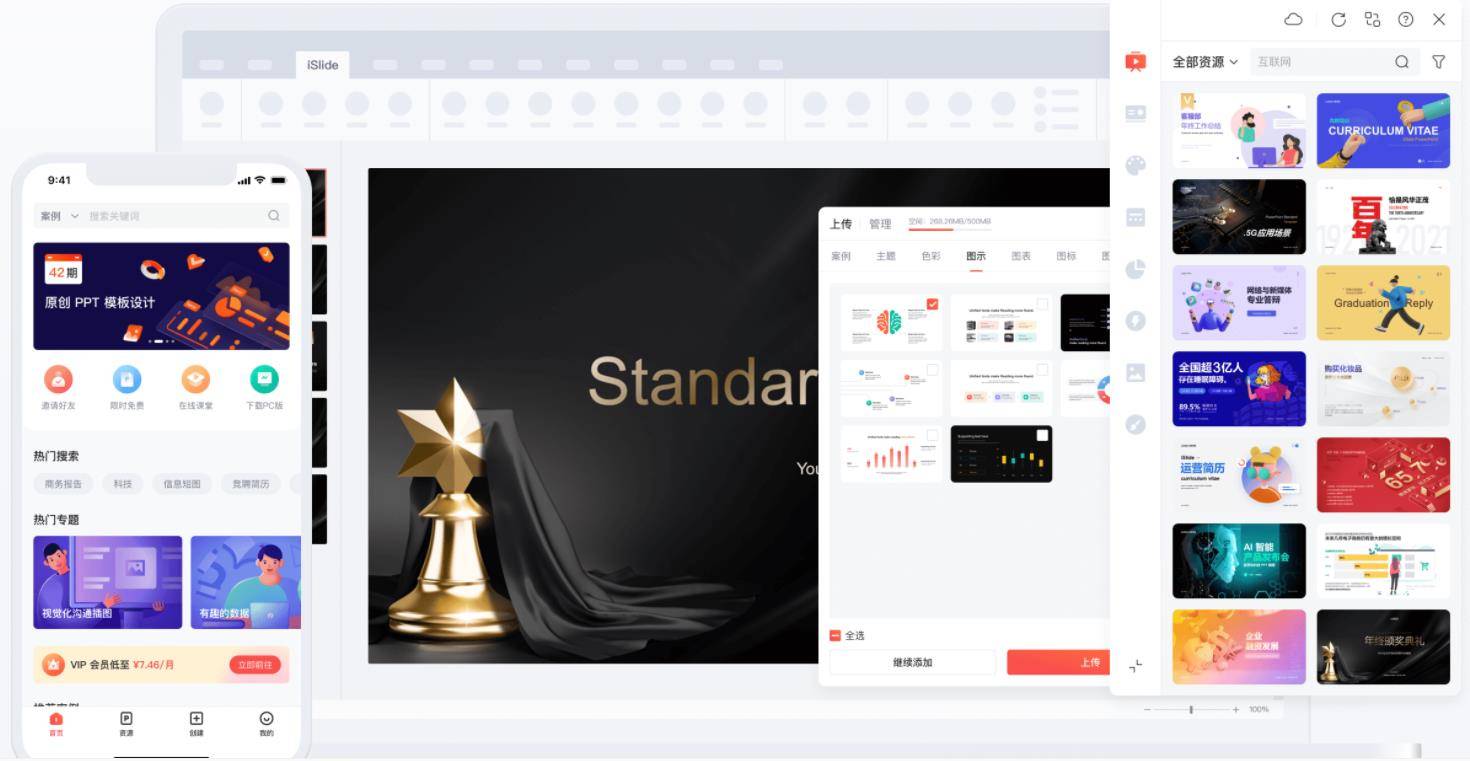
iSlide2024一款基于PPT的插件工具包含38个设计辅助功能
根据使用者情况表明iSlide 是一款拥有30W素材的PPT高效设计软件,可提高90%工作效率,现全球已有超过1400万使用者,智能排版原创高品模板可商用图形,真正摆脱PPT的束缚,把精力用在该用的地方。我们都明白islide插件功能特…...

ATE新能源汽车充电桩自动负载测试系统
随着新能源汽车的普及,充电桩的需求也在不断增加,为了确保充电桩的性能和安全性,对其进行负载测试是非常重要的。ATE新能源汽车充电桩自动负载测试系统是一种专门用于检测充电桩性能的设备,它可以模拟各种实际使用场景,…...
机器学习笔记 - 感知器的数学表达
一、假设前提 感知机(或称感知器,Perceptron)是Frank Rosenblatt在1957年就职于Cornell航空实验室(Cornell Aeronautical Laboratory)时所发明的一种人工神经网络。 它可以被视为一种最简单形式的前馈神经网络,是一种二元线性分类模型,其输入为实例的特征向量,输出为实…...
JavaScript 自定义对象
<!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>JS-定义对象</title> </head><body&g…...
UNI-APP_ios自动适应底部安全区背景,修改安全区背景
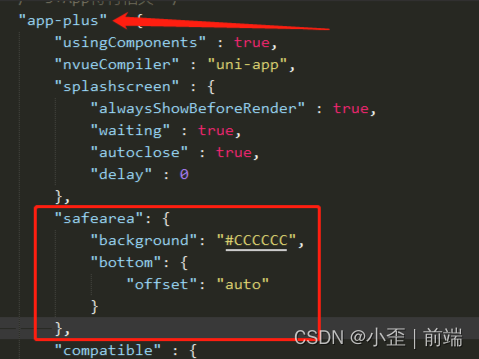
自动适应(推荐) 将所有 iPhone X(刘海屏) 底部安全区域背景颜色 自动适应,当前页面什么颜色会自动调整。 1.打开 manifest.json ,打开源码视图 2.找到 app-plus 配置项,添加以下代码 "safearea&quo…...

Docker 的了解和使用
1. 虚拟化全虚拟化:虚拟机的操作系统可以和宿主机的操作系统完全不同。os层虚拟化:操作内核相同,软件虚拟化。2. docker安装 Docker容器本质上是Linux容器,它需要Linux内核环境才能运行。在Windows上直接运行Docker,需…...
)
别再只盯着VGA线了!手把手教你用示波器看懂RGBHV时序图(附绿同步电路分析)
数字示波器实战:解码RGBHV信号与绿同步电路设计全指南 在复古游戏机改造、CRT显示器维修或视频转换板设计的场景中,RGBHV信号的理解与测量往往是硬件工程师和电子爱好者面临的第一道技术门槛。不同于现代数字接口的标准化协议,模拟视频信号时…...

靠谱的工程防火门公司推荐工程防火门
在工程行业摸爬滚打十几年,我见过太多因防火门翻车的项目:验收反复返工、产品用了两三年就变形卡死、超大门洞找不到厂家定制…… 这些看似鸡毛蒜皮的小事,一旦卡到消防验收节点上,轻则赔钱延期,重则被责令停工整改。今…...

AMD Ryzen硬件调试终极指南:深入SMU Debug Tool的完整实战应用
AMD Ryzen硬件调试终极指南:深入SMU Debug Tool的完整实战应用 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: ht…...

终极指南:Diem社区治理的创新机制与DAO组织运作全解析
终极指南:Diem社区治理的创新机制与DAO组织运作全解析 【免费下载链接】diem Diem’s mission is to build a trusted and innovative financial network that empowers people and businesses around the world. 项目地址: https://gitcode.com/gh_mirrors/di/di…...
)
告别PLC!用Python+ModbusTCP玩转FactoryIO仿真(附完整代码与可视化界面)
PythonModbusTCP工业仿真实战:从零构建FactoryIO智能分拣系统 工业自动化领域正在经历一场静默革命——传统PLC的垄断地位首次被通用编程语言打破。去年某国际自动化展会上,一位工程师仅用200行Python代码就复现了某品牌PLC的复杂流水线控制逻辑…...

免费在线PPT制作工具PPTist:浏览器中的专业演示文稿创作平台
免费在线PPT制作工具PPTist:浏览器中的专业演示文稿创作平台 【免费下载链接】PPTist PowerPoint-ist(/pauəpɔintist/), An online presentation application that replicates most of the commonly used features of MS PowerPoint, allow…...
PixelAnnotationTool终极指南:如何用智能分水岭算法实现高效像素级图像标注
PixelAnnotationTool终极指南:如何用智能分水岭算法实现高效像素级图像标注 【免费下载链接】PixelAnnotationTool Annotate quickly images. 项目地址: https://gitcode.com/gh_mirrors/pi/PixelAnnotationTool 你是否曾经为图像标注工作感到头疼ÿ…...

免费开源!3分钟让Mac鼠标滚动告别卡顿的终极平滑方案
免费开源!3分钟让Mac鼠标滚动告别卡顿的终极平滑方案 【免费下载链接】Mos 一个用于在 macOS 上平滑你的鼠标滚动效果或单独设置滚动方向的小工具, 让你的滚轮爽如触控板 | A lightweight tool used to smooth scrolling and set scroll direction independently fo…...

从零打造蒸汽朋克辉光管时钟:驱动方案、定制管与系统集成实战
1. 项目概述:从零开始的蒸汽朋克辉光管时钟作为一个在电子制作和复古硬件领域折腾了十多年的老玩家,我始终对那些散发着温暖橘红色光芒的辉光管(Nixie Tube)情有独钟。它们不仅仅是时间的显示器,更像是一件连接过去与未…...