SPI设备树处理过程
SPI设备树处理过程
文章目录
- SPI设备树处理过程
- 参考资料:
- 一、 spi_device结构体
- 二、 SPI设备树格式
- 2.1 SPI Master
- 2.2 SPI Device
- 2.3 设备树示例
- 三、设备树实例
- 3.1 使用GPIO模拟的SPI控制器
- 3.2 IMX6ULL SPI控制器
- 四、 设备树处理过程
- 致谢
参考资料:
- 内核头文件:
include\linux\spi\spi.h - 内核文档:
Documentation\devicetree\bindings\spi\spi-bus.txt - 内核源码:
drivers\spi\spi.c
一、 spi_device结构体
/*** struct spi_device - Master side proxy for an SPI slave device* @dev: Driver model representation of the device.* @master: SPI controller used with the device.* @max_speed_hz: Maximum clock rate to be used with this chip* (on this board); may be changed by the device's driver.* The spi_transfer.speed_hz can override this for each transfer.* @chip_select: Chipselect, distinguishing chips handled by @master.* @mode: The spi mode defines how data is clocked out and in.* This may be changed by the device's driver.* The "active low" default for chipselect mode can be overridden* (by specifying SPI_CS_HIGH) as can the "MSB first" default for* each word in a transfer (by specifying SPI_LSB_FIRST).* @bits_per_word: Data transfers involve one or more words; word sizes* like eight or 12 bits are common. In-memory wordsizes are* powers of two bytes (e.g. 20 bit samples use 32 bits).* This may be changed by the device's driver, or left at the* default (0) indicating protocol words are eight bit bytes.* The spi_transfer.bits_per_word can override this for each transfer.* @irq: Negative, or the number passed to request_irq() to receive* interrupts from this device.* @controller_state: Controller's runtime state* @controller_data: Board-specific definitions for controller, such as* FIFO initialization parameters; from board_info.controller_data* @modalias: Name of the driver to use with this device, or an alias* for that name. This appears in the sysfs "modalias" attribute* for driver coldplugging, and in uevents used for hotplugging* @cs_gpio: gpio number of the chipselect line (optional, -ENOENT when* when not using a GPIO line)** @statistics: statistics for the spi_device** A @spi_device is used to interchange data between an SPI slave* (usually a discrete chip) and CPU memory.** In @dev, the platform_data is used to hold information about this* device that's meaningful to the device's protocol driver, but not* to its controller. One example might be an identifier for a chip* variant with slightly different functionality; another might be* information about how this particular board wires the chip's pins.*/
struct spi_device {struct device dev;struct spi_master *master;u32 max_speed_hz;u8 chip_select;u8 bits_per_word;u16 mode;
#define SPI_CPHA 0x01 /* clock phase */
#define SPI_CPOL 0x02 /* clock polarity */
#define SPI_MODE_0 (0|0) /* (original MicroWire) */
#define SPI_MODE_1 (0|SPI_CPHA)
#define SPI_MODE_2 (SPI_CPOL|0)
#define SPI_MODE_3 (SPI_CPOL|SPI_CPHA)
#define SPI_CS_HIGH 0x04 /* chipselect active high? */
#define SPI_LSB_FIRST 0x08 /* per-word bits-on-wire */
#define SPI_3WIRE 0x10 /* SI/SO signals shared */
#define SPI_LOOP 0x20 /* loopback mode */
#define SPI_NO_CS 0x40 /* 1 dev/bus, no chipselect */
#define SPI_READY 0x80 /* slave pulls low to pause */
#define SPI_TX_DUAL 0x100 /* transmit with 2 wires */
#define SPI_TX_QUAD 0x200 /* transmit with 4 wires */
#define SPI_RX_DUAL 0x400 /* receive with 2 wires */
#define SPI_RX_QUAD 0x800 /* receive with 4 wires */int irq;void *controller_state;void *controller_data;char modalias[SPI_NAME_SIZE];int cs_gpio; /* chip select gpio *//* the statistics */struct spi_statistics statistics;/** likely need more hooks for more protocol options affecting how* the controller talks to each chip, like:* - memory packing (12 bit samples into low bits, others zeroed)* - priority* - drop chipselect after each word* - chipselect delays* - ...*/
};
各个成员含义如下:
- max_speed_hz:该设备能支持的SPI时钟最大值
- chip_select:是这个spi_master下的第几个设备
- 在spi_master中有一个cs_gpios数组,里面存放有下面各个spi设备的片选引脚
- spi_device的片选引脚就是:cs_gpios[spi_device.chip_select]
- cs_gpio:这是可选项,也可以把spi_device的片选引脚记录在这里
- bits_per_word:每个基本的SPI传输涉及多少位
- word:我们使用SPI控制器时,一般是往某个寄存器里写入数据,SPI控制器就会把这些数据一位一位地发送出去
- 一个寄存器是32位的,被称为一个word(有时候也称为double word)
- 这个寄存器里多少位会被发送出去?使用bits_per_word来表示
- 扩展:bits_per_word是可以大于32的,也就是每次SPI传输可能会发送多于32位的数据,这适用于DMA突发传输
- mode:含义广泛,看看结构体里那些宏
- SPI_CPHA:在第1个周期采样,在第2个周期采样?
- SPI_CPOL:平时时钟极性
- SPI_CPHA和SPI_CPOL组合起来就可以得到4种模式
- SPI_MODE_0:平时SCK为低(SPI_CPOL为0),在第1个周期采样(SPI_CPHA为0)
- SPI_MODE_1:平时SCK为低(SPI_CPOL为0),在第2个周期采样(SPI_CPHA为1)
- SPI_MODE_2:平时SCK为高(SPI_CPOL为1),在第1个周期采样(SPI_CPHA为0)
- SPI_MODE_3:平时SCK为高(SPI_CPOL为1),在第2个周期采样(SPI_CPHA为1)
- SPI_CS_HIGH:一般来说片选引脚时低电平有效,SPI_CS_HIGH表示高电平有效
- SPI_LSB_FIRST:
- 一般来说先传输MSB(最高位),SPI_LSB_FIRST表示先传LSB(最低位);
- 很多SPI控制器并不支持SPI_LSB_FIRST
- SPI_3WIRE:SO、SI共用一条线
- SPI_LOOP:回环模式,就是SO、SI连接在一起
- SPI_NO_CS:只有一个SPI设备,没有片选信号,也不需要片选信号
- SPI_READY:SPI从设备可以拉低信号,表示暂停、表示未就绪
- SPI_TX_DUAL:发送数据时有2条信号线
- SPI_TX_QUAD:发送数据时有4条信号线
- SPI_RX_DUAL:接收数据时有2条信号线
- SPI_RX_QUAD:接收数据时有4条信号线
二、 SPI设备树格式
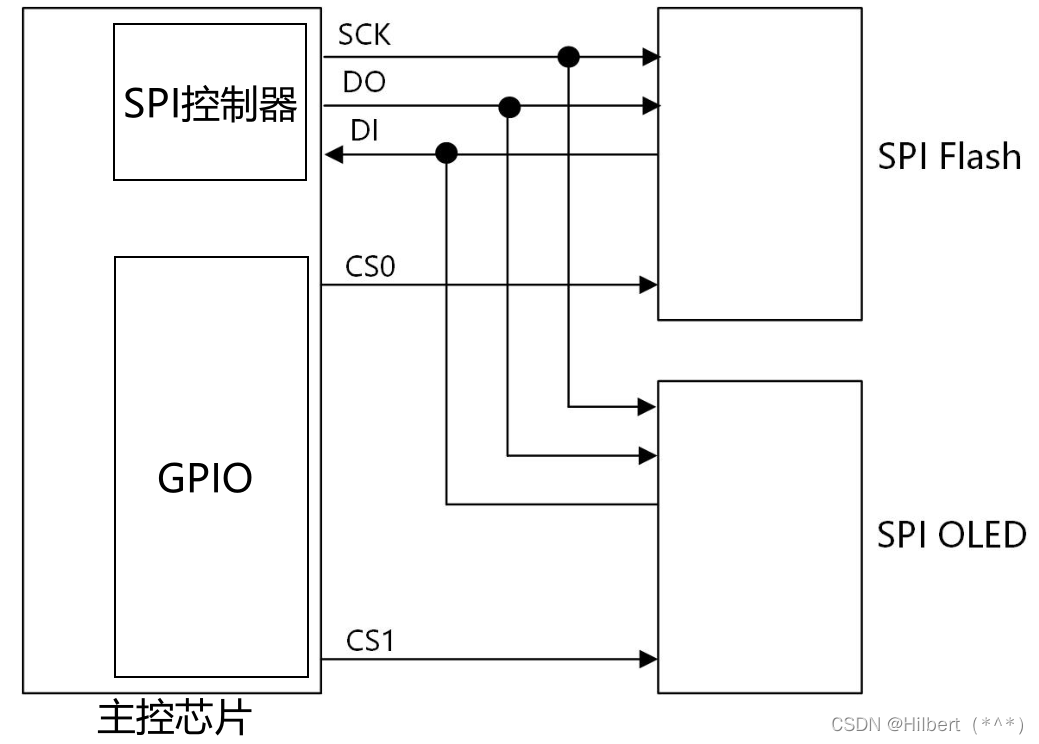
对于SPI Master,就是SPI控制器,它下面可以连接多个SPI设备。
在设备树里,使用一个节点来表示SPI Master,使用子节点来表示挂在下面的SPI设备。
2.1 SPI Master
在设备树中,对于SPI Master,必须的属性如下:
- #address-cells:这个SPI Master下的SPI设备,需要多少个cell来表述它的片选引脚
- #size-cells:必须设置为0
- compatible:根据它找到SPI Master驱动
可选的属性如下:
- cs-gpios:SPI Master可以使用多个GPIO当做片选,可以在这个属性列出那些GPIO
- num-cs:片选引脚总数
其他属性都是驱动程序相关的,不同的SPI Master驱动程序要求的属性可能不一样。
2.2 SPI Device
在SPI Master对应的设备树节点下,每一个子节点都对应一个SPI设备,这个SPI设备连接在该SPI Master下面。
这些子节点中,必选的属性如下:
- compatible:根据它找到SPI Device驱动
- reg:用来表示它使用哪个片选引脚
- spi-max-frequency:必选,该SPI设备支持的最大SPI时钟
可选的属性如下:
- spi-cpol:这是一个空属性(没有值),表示CPOL为1,即平时SPI时钟为低电平
- spi-cpha:这是一个空属性(没有值),表示CPHA为1),即在时钟的第2个边沿采样数据
- spi-cs-high:这是一个空属性(没有值),表示片选引脚高电平有效
- spi-3wire:这是一个空属性(没有值),表示使用SPI 三线模式
- spi-lsb-first:这是一个空属性(没有值),表示使用SPI传输数据时先传输最低位(LSB)
- spi-tx-bus-width:表示有几条MOSI引脚;没有这个属性时默认只有1条MOSI引脚
- spi-rx-bus-width:表示有几条MISO引脚;没有这个属性时默认只有1条MISO引脚
- spi-rx-delay-us:单位是毫秒,表示每次读传输后要延时多久
- spi-tx-delay-us:单位是毫秒,表示每次写传输后要延时多久
2.3 设备树示例
spi@f00 {#address-cells = <1>;#size-cells = <0>;compatible = "fsl,mpc5200b-spi","fsl,mpc5200-spi";reg = <0xf00 0x20>;interrupts = <2 13 0 2 14 0>;interrupt-parent = <&mpc5200_pic>;ethernet-switch@0 {compatible = "micrel,ks8995m";spi-max-frequency = <1000000>;reg = <0>;};codec@1 {compatible = "ti,tlv320aic26";spi-max-frequency = <100000>;reg = <1>;};};
三、设备树实例
在设备树里,会有一个节点用来表示SPI控制器。
在这个SPI控制器下面,连接有哪些SPI设备?会在设备树里使用子节点来描述SPI设备。
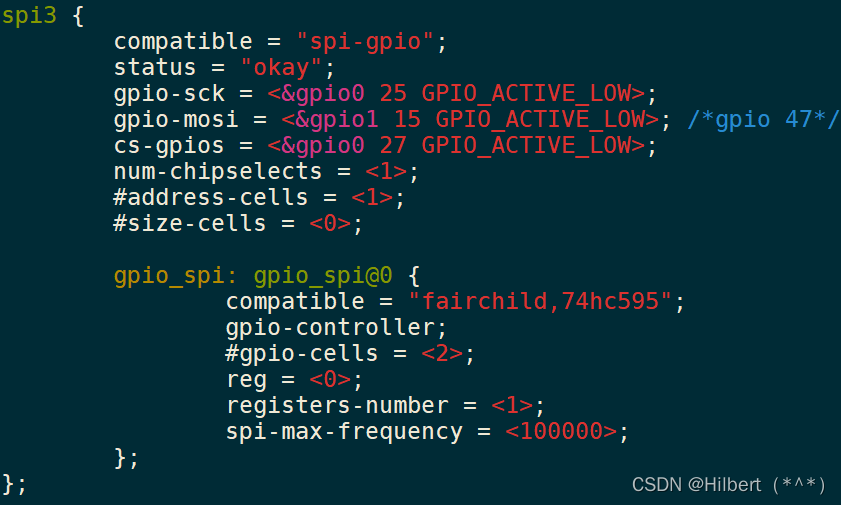
3.1 使用GPIO模拟的SPI控制器
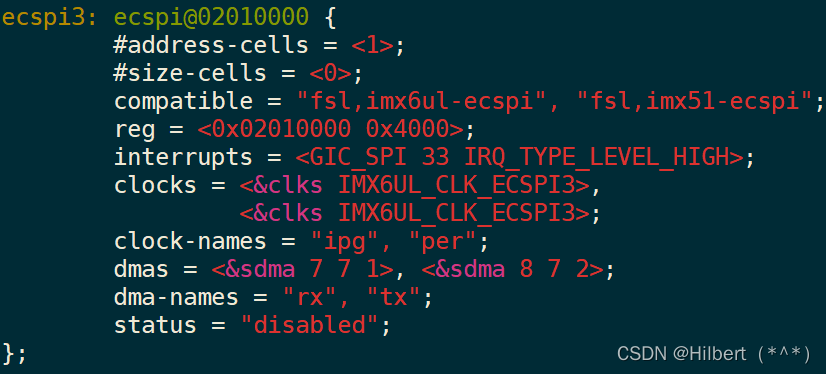
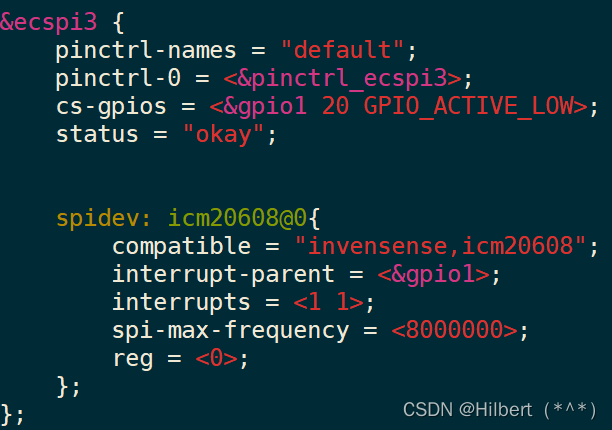
3.2 IMX6ULL SPI控制器
内核文件:arch/arm/boot/dts/imx6ull.dtsi
内核文件:arch/arm/boot/dts/100ask_imx6ull-14x14.dts
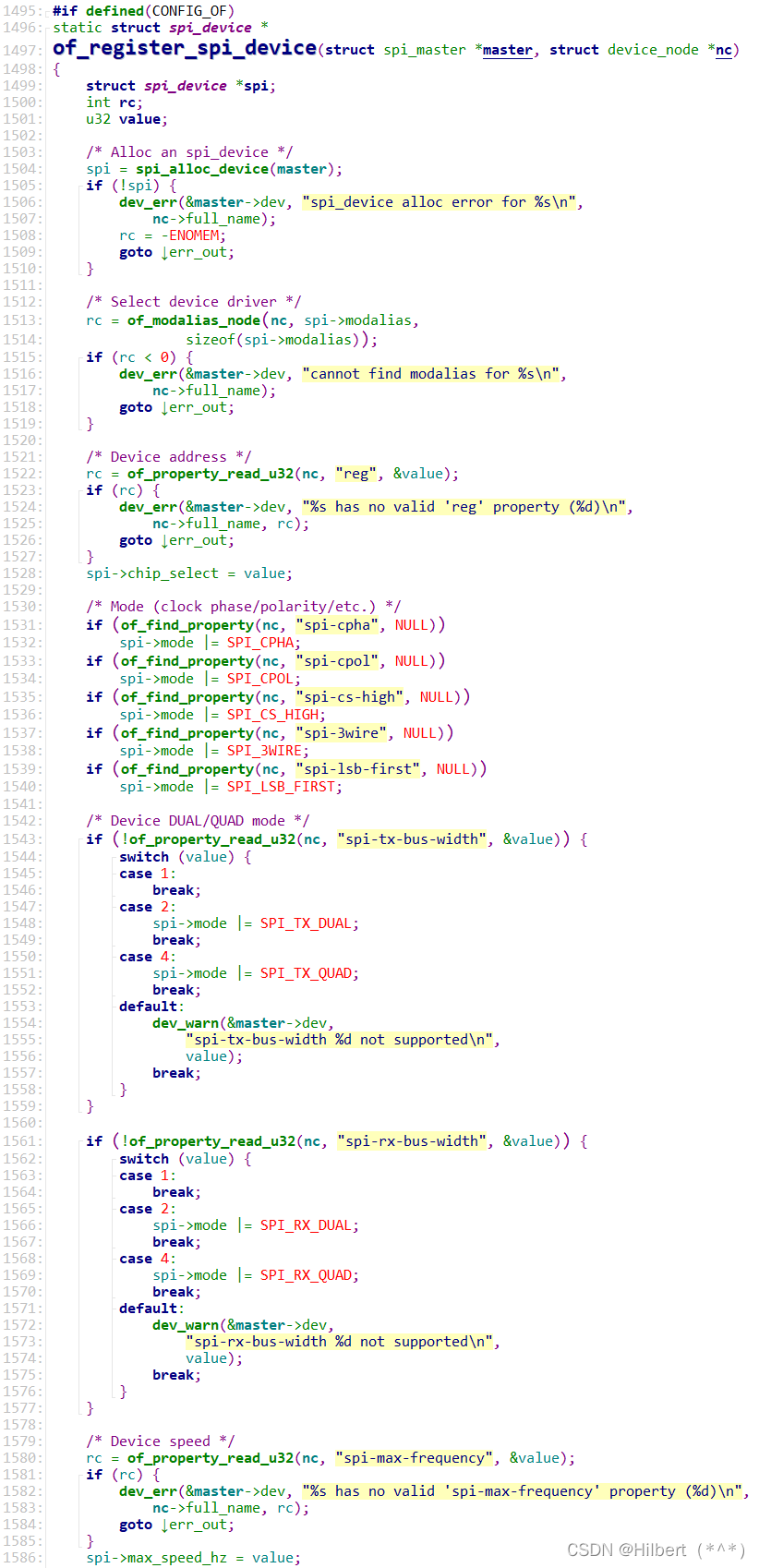
四、 设备树处理过程
内核源码:drivers\spi\spi.c
致谢
以上笔记源自
韦东山老师的视频课程,感谢韦老师,韦老师是嵌入式培训界一股清流,为嵌入式linux开发点起的星星之火,也愿韦老师桃李满园。聚是一团火,散是满天星!
在这样一个速食的时代,坚持做自己,慢下来,潜心琢磨,心怀敬畏,领悟知识,才能向下扎到根,向上捅破天,背着世界往前行!
仅此向嵌入行业里的每一个认真做技术的从业者致敬!
相关文章:
SPI设备树处理过程
SPI设备树处理过程 文章目录SPI设备树处理过程参考资料:一、 spi_device结构体二、 SPI设备树格式2.1 SPI Master2.2 SPI Device2.3 设备树示例三、设备树实例3.1 使用GPIO模拟的SPI控制器3.2 IMX6ULL SPI控制器四、 设备树处理过程致谢参考资料: 内核头…...

数据有哪些重要的作用?
我们正处在科技高速发展的时代,如今互联网已经与我们的生活息息相关,我们每天在互联网产生大量的数据,这些数据散落在网络中看似没有怎么作用,但是这些数据经过系统的处理整合起来确实非常有价值的。 一、 发展大数据技术可以提高…...
spring面试题总结
1、spring是什么? spring是一个轻量级IOC和AOP容器框架,是为Java应用程序提供基础性服务的一套框架,目的是用于简化企业应用的开发,开发者只需要关注业务需求即可: core container 容器组件 spring context,…...
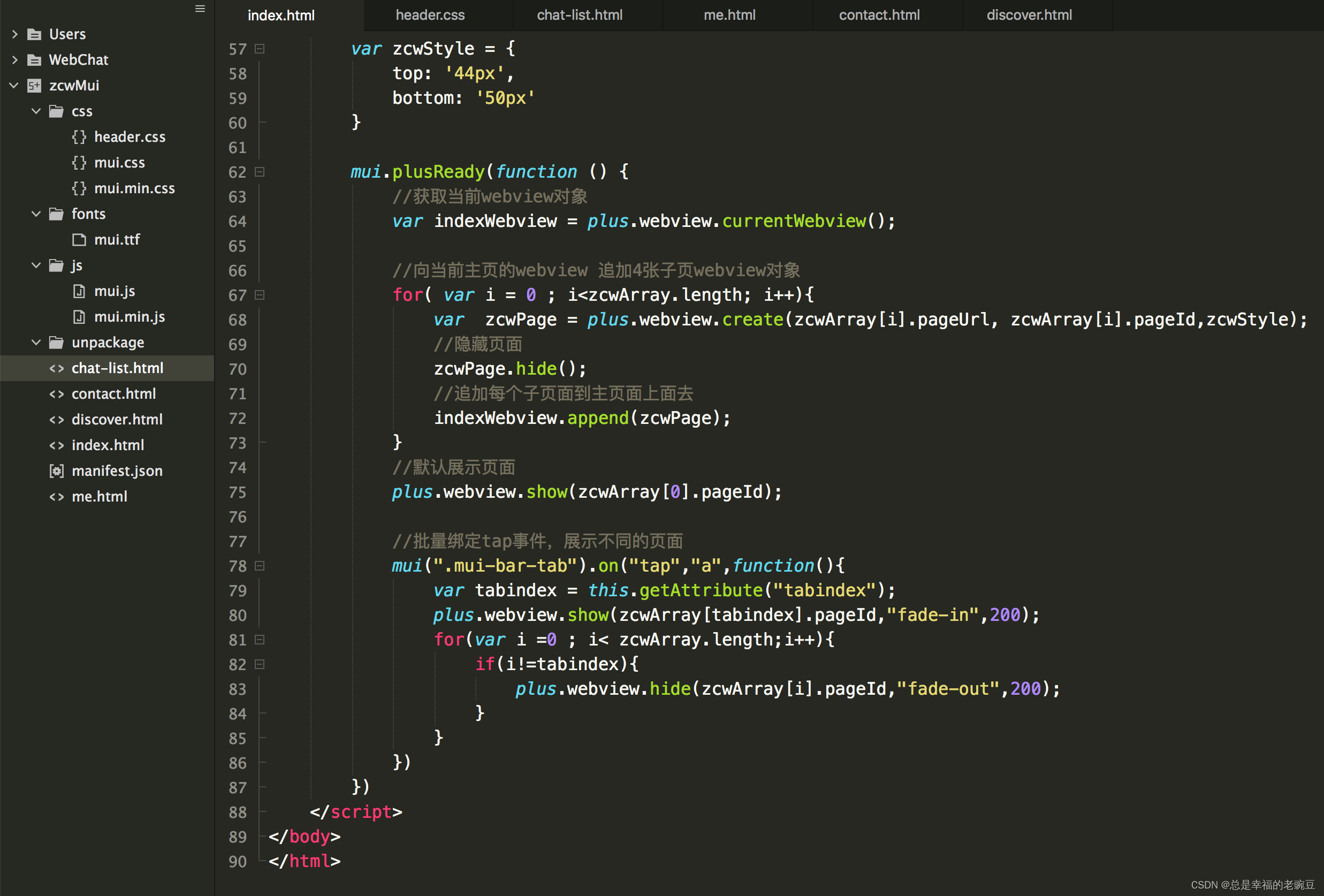
使用MUI与H5+构建移动端app
前言 通过mui构建APP 效果图: <!DOCTYPE html> <html> <head><meta charset...

第17篇:Java变量总结
目录 1.变量的概念 1.1 变量来源 1.2 计算机中的变量 1.3 变量如何在内存中存储 2.Java变量...
使用51单片机的GPIO输出占空比可调节的PWM波
一、前言 在一些单片机或微控制器中,通用GPIO可以被配置为产生PWM信号。PWM即脉冲宽度调制,是一种用于模拟输出的技术。它可以通过改变输出信号的脉冲宽度来控制电路中的电平,从而实现对电路的控制。 二、什么是PWM波? PWM波&a…...
从产品经理的角度如何提升项目的交付质量?
提高交付质量 ,对于每个IT公司都是永恒的话题。 交付质量其实包含2重意义, 一是交付的高质量(客户角度),即客户的满意度;二是高质量的交付(交付团队的角度),这里是指如何…...

JavaScript BOM【快速掌握知识点】
目录 Window对象的常用属性 语法: Window对象的常用方法 语法: open()和close()方法 History对象 常用属性和方法 示例 Location对象 常用属性 常用方法 Document对象的常用方法 定时函数 超时调用:setTimeout() 间歇调用&…...

【算法】哈希表
作者:指针不指南吗 专栏:算法篇 🐾或许会很慢,但是不可以停下来🐾 文章目录1.定义2.优点3.数字哈希3.1拉链法3.2开放寻址法3.3 例题4.字符串哈希1.定义 哈希表(Hash table),是根据键…...

彻底搞懂React-hook链表构建原理
写在前面的小结 每一个 hook 函数都有对应的 hook 对象保存状态信息useContext是唯一一个不需要添加到 hook 链表的 hook 函数只有 useEffect、useLayoutEffect 以及 useImperativeHandle 这三个 hook 具有副作用,在 render 阶段需要给函数组件 fiber 添加对应的副…...

【数据挖掘实战】——应用系统负载分析与容量预测(ARIMA模型)
项目地址:Datamining_project: 数据挖掘实战项目代码 目录 一、背景和挖掘目标 1、问题背景 2、传统方法的不足 2、原始数据 3、挖掘目标 二、分析方法与过程 1、初步分析 2、总体流程 第一步:数据抽取 第二步:探索分析 第三步&a…...

【华为OD机试模拟题】用 C++ 实现 - 九宫格按键输入(2023.Q1)
最近更新的博客 【华为OD机试模拟题】用 C++ 实现 - 去重求和(2023.Q1) 文章目录 最近更新的博客使用说明九宫格按键输入题目输入输出示例一输入输出说明示例二输入输出说明Code使用说明 参加华为od机试,一定要注意不要完全背诵代码,需要理解之后模仿写出,通过率才会高…...

Linux: config: CONFIG_SYN_COOKIES
文章目录 CONFIG_SYN_COOKIESLinux kernel里的超时设置Huawei SBC详细工作机制CONFIG_SYN_COOKIES config SYN_COOKIES,布尔值;是否支持IP:TCP syncookie功能。 详解:一般来说TCP/IP网络不能够阻挡SYN flooding工具。这个工具很容易被利用,而且会导致DOS工具,妨碍其他整…...

【笔记】C# 数据类型转换
文章目录前言类型转换的概念1,隐式转换2,显式转换3,程序类转换结语前言 🌻 大家好啊,我是writer桑,本章是关于 C# 数据类型转换的一个总结,其中包含隐式、显示转换和程序类转换,方便…...

JavaWeb JavaBean,MVC三层架构
9、JavaBean 实体类 JavaBean有特定的写法: 必须要有一个无参构造属性必须私有化必须有对应的get/set方法; 一般用来和数据库的字段做映射 ORM; ORM :对象关系映射 表—>类字段–>属性行记录---->对象 people表 …...
JavaEE简单实例——MyBatis一对多关联映射的嵌套结果集查询
简单介绍: 在之前的章节,我们简单介绍了MyBatis中的一对一的关联查询,使用了嵌套查询和嵌套结果集两种方式进行讲解,但是在实际的使用中,我们常用的是嵌套结果集的查询方式,所以在一对多的查询中ÿ…...
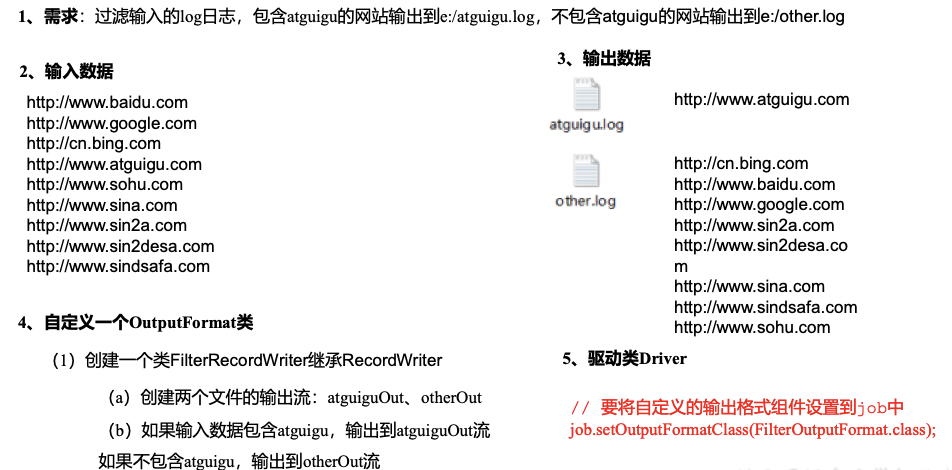
大数据框架之Hadoop:MapReduce(三)MapReduce框架原理——OutputFormat数据输出
3.6.1OutputFormat接口实现类 OutputFormat是MapReduce输出的基类,所有实现MapReduce输出都实现了OutputFormat接口。下面我们介绍几种常见的OutputFormat实现类。 1、文本输出TextOutputFormat 默认的输出格式是TextOutputFormat,它把每条记录写为文…...

Linux搜索、编辑
目录 1.搜索 1.1.基础用法 1.2.高级用法 2.编辑 2.1.vim简洁 2.2.vim快捷键 1.搜索 1.1.基础用法 find命令用于搜索,格式如下: find 指定目录 -匹配方式 所要匹配的关键字 所要匹配的关键字支持通配符,?代表一个字符*代表任意个字符。 如果想设…...

Git Commit提交规范总结
文章目录前言git commit 提交规范提交消息头(commit message header)提交消息具体内容(commit message body)提交消息尾述(commit message footer)Revert表情(Emojis)标识idea插件其他操作Commitizen生成 Change logGit获取提交消息格式化输出相关参考前言 我们都知道…...

【ESP 保姆级教程】疯狂毕设篇 —— 案例:基于ESP8266和EMQX的教室灯光控制系统
忘记过去,超越自己 ❤️ 博客主页 单片机菜鸟哥,一个野生非专业硬件IOT爱好者 ❤️❤️ 本篇创建记录 2023-02-26 ❤️❤️ 本篇更新记录 2022-02-26 ❤️🎉 欢迎关注 🔎点赞 👍收藏 ⭐️留言📝🙏 此博客均由博主单独编写,不存在任何商业团队运营,如发现错误,请…...

Thorium浏览器深度解析:5个核心优势与进阶配置实战
Thorium浏览器深度解析:5个核心优势与进阶配置实战 【免费下载链接】thorium Chromium fork named after radioactive element No. 90. Source code and Linux releases. Windows/MacOS/ARM builds served in different repos, links are towards the top of the RE…...

Blitz.js全栈开发框架:零API理念与Next.js深度集成实战
1. 项目概述:一个颠覆性的全栈开发框架如果你和我一样,在过去的几年里,一直在React生态圈里打转,从Create React App到Next.js,再到尝试自己搭建一套包含身份验证、数据层、API路由的完整应用,那你一定对那…...

ElevenLabs匈牙利语音API响应延迟飙升300%?内网穿透+CDN缓存+匈牙利语音素预加载三阶优化方案
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs匈牙利文语音API响应延迟飙升300%的现象复现与根因定位 近期多位开发者反馈,ElevenLabs API 在处理匈牙利语(hu-HU)文本转语音请求时,平均端到…...

基于GitHub Pages与Jekyll的静态博客搭建与深度定制指南
1. 项目概述:一个静态博客的诞生与演进如果你对搭建个人博客感兴趣,或者正在寻找一个轻量、高效、完全可控的线上空间,那么“RyansGhost/RyansGhost.github.io”这个项目仓库,很可能就是你一直在寻找的答案。这不仅仅是一个托管在…...

揭秘Midjourney“树胶重铬酸盐”风格指令:3步精准触发古典印相质感,92%用户从未用对的隐藏参数组合
更多请点击: https://intelliparadigm.com 第一章:树胶重铬酸盐工艺的光学原理与数字映射本质 树胶重铬酸盐(Gum Bichromate)工艺是19世纪末发展起来的经典光敏印相技术,其核心光学原理基于重铬酸盐在紫外光照射下发生…...

基于Kubernetes Lease构建分布式部署锁:解决CI/CD环境下的资源竞争
1. 项目概述:从“clawfight”看一场被遗忘的社区技术博弈看到“2019-02-18/clawfight”这个标题,很多人的第一反应可能是困惑。它不像一个标准的软件项目名,没有清晰的版本号,也没有指明具体的技术栈。但恰恰是这种看似随意的命名…...
在Multi-Agent系统中的应用(图编排、动态DAG、Dynamic DAG)动态Agent Graph)
有向无环图(DAG)在Multi-Agent系统中的应用(图编排、动态DAG、Dynamic DAG)动态Agent Graph
文章目录有向无环图(DAG)在 Multi-Agent 系统中的应用一、什么是 DAG(有向无环图)二、为什么 Multi-Agent 需要 DAG三、Multi-Agent 的本质:任务图四、DAG 在 Multi-Agent 中的核心作用五、一个典型 Multi-Agent DAG六…...
)
旁遮普语内容出海迫在眉睫!ElevenLabs+AWS Polly双引擎容灾方案(含Failover切换SLA 99.99%保障协议模板)
更多请点击: https://intelliparadigm.com 第一章:旁遮普语内容出海的战略紧迫性与本地化语音缺口 旁遮普语是全球使用人数超1.2亿的语言,主要分布在印度旁遮普邦、巴基斯坦旁遮普省及庞大的海外侨民社群(如加拿大、英国、美国&…...

【ElevenLabs匈牙利语音实战指南】:2024最新API调用、音色微调与本地化合规避坑全解析
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs匈牙利语音支持概览与本地化价值定位 ElevenLabs 自 2024 年 3 月起正式引入匈牙利语(hu-HU)语音合成支持,成为其首批覆盖的中东欧语言之一。该能力依托于…...

Instagram视频下载终极指南:三分钟掌握免费下载技巧
Instagram视频下载终极指南:三分钟掌握免费下载技巧 【免费下载链接】instagram-video-downloader Simple website made with Next.js for downloading instagram videos with an API that can be used to integrate it in other applications. 项目地址: https:…...