基于厨师算法的无人机航迹规划-附代码
基于厨师算法的无人机航迹规划
文章目录
- 基于厨师算法的无人机航迹规划
- 1.厨师搜索算法
- 2.无人机飞行环境建模
- 3.无人机航迹规划建模
- 4.实验结果
- 4.1地图创建
- 4.2 航迹规划
- 5.参考文献
- 6.Matlab代码
摘要:本文主要介绍利用厨师算法来优化无人机航迹规划。
1.厨师搜索算法
厨师算法原理请参考:https://blog.csdn.net/u011835903/article/details/130534839
2.无人机飞行环境建模
? 环境模型的建立是考验无人机是否可以圆满完成人类所赋予各项任务的基
础和前提,其中第一步便是如何描述规划空间中的障碍物。首先我们将采取函数模拟法模拟地貌特征。其函数表达式为:
z ( x , y ) = s i n ( y + a ) + b s i n ( x ) + c c o s ( d y 2 + x 2 ) + e c o s ( y ) + f s i n ( f y 2 + x 2 ) + g c o s ( y ) (1) z(x,y)=sin(y+a)+bsin(x)+ccos(d\sqrt{y^2+x^2})+ecos(y)+fsin(f\sqrt{y^2+x^2})+gcos(y)\tag{1} z(x,y)=sin(y+a)+bsin(x)+ccos(dy2+x2)+ecos(y)+fsin(fy2+x2)+gcos(y)(1)
其中, ( x , y ) (x, y) (x,y) 为地形上某点投影在水平面上的点坐标, z z z 则为对应点坐标的高度。式中 a , b , c , d , e , f , g a, b, c, d, e, f , g a,b,c,d,e,f,g 是常系数,想要得到不同的地貌特征可以通过改变其常系数的大小,以上建模是作为环境模型的基准地形信息。但为了得到障碍区域我们还需要在这个基准地形上叠加山峰模型,这样就可以模拟像山峰、丘陵等障碍地理信息。山峰模型的数学表达式为:
h ( x , y ) = ∑ i h i e x p [ − ( x − x o i ) 2 a i 2 − ( y − y o i ) 2 b i 2 ] + h o (2) h(x,y)=\sum_ih_iexp[-\frac{(x-x_{oi})^2}{a_i^2}-\frac{(y-y_{oi})^2}{b_i^2}]+h_o \tag{2} h(x,y)=i∑hiexp[−ai2(x−xoi)2−bi2(y−yoi)2]+ho(2)
式 (2)中, h o h_o ho 和 h i h_i hi 分别表示基准地形和第 i i i座山峰的高度, ( x o i , y o i ) (xoi , y oi ) (xoi,yoi)则表示第 i座山峰的中心坐标位置,a i 和 b i 分别是第 i 座山峰沿 x 轴和 y 轴方向的坡度。由式(1)和(2),我们可以得到如下表达式:
Z ( x , y ) = m a x [ z ( x , y ) , h ( x , y ) ] (3) Z(x,y)=max[z(x,y),h(x,y)]\tag{3} Z(x,y)=max[z(x,y),h(x,y)](3)
无人机在躲避障碍物的同时也会经常遇到具有威胁飞行安全的区域,我们称之为威胁区域。这些威胁区域可以是敌人的雷达和防空导弹系统的探测威胁区域也可以是一些其它的威胁,一旦无人机进入这些区域很有可能会被击落或者坠毁。为了简化模型,本文采用半径为 r 的圆柱形区域表示威胁区域,其半径的大小决定威胁区域的覆盖范围。每一个圆柱体的中心位置是对无人机构成最大威胁的地方并向外依次减弱。
3.无人机航迹规划建模
? 在环境建模的基础上,无人机航迹规划需要考虑到在执行复杂任务的过程中自身性能约束要求,合理的设计航迹评价函数才能使得厨师搜索算法得出的最后结果符合要求,并保证规划出的航迹是有效的。考虑到实际环境中,无人机需要不断适应变化的环境。所以在无人机路径规划过程中,最优路径会显得比较复杂,并包含许多不同的特征。基于实际的情况,本文采用较为复杂的航迹评价函数进行无人机路径规划。影响无人机性能的指标主要包括航迹长度、飞行高度、最小步长、转角代价、最大爬升角等。
? 搜索最佳路径通常与搜索最短路径是密不可分的。在无人机航迹规划过程中,航迹的长度对于大多数航迹规划任务来说也是非常重要的。众所周知,较短的路线可以节省更多的燃料和更多的时间并且发现未知威胁的几率会更低。我们一般把路径定义为无人机从起始点到终点所飞行路程的值,设一条完整的航线有 n n n个节点,其中第 i i i个航路点和第 i + 1 i+1 i+1个航路点之间的距离表示为 l i l_i li ,这两个航路点的坐标分别表示为 ( x i , y i , z i ) (x_i,y_i,z_i ) (xi,yi,zi), ( x i + 1 , y i + 1 , z i + 1 ) (x_{i+1}, y_{i+1},z_{i+1}) (xi+1,yi+1,zi+1)并分别记作 g ( i ) g(i) g(i)和 g ( i + 1 ) g(i+1) g(i+1)。航迹需要满足如下条件:
{ l i = ∣ ∣ g ( i + 1 ) − g ( i ) ∣ ∣ 2 L p a t h = ∑ i = 1 n − 1 l i (4) \begin{cases} l_i = ||g(i+1)-g(i)||_2\\ L_{path}=\sum_{i=1}^{n-1}l_i \end{cases}\tag{4} {li=∣∣g(i+1)−g(i)∣∣2Lpath=∑i=1n−1li(4)
在飞行的过程中会遇到障碍物或者进入威胁区域,如果无人机无法躲避障碍物或者飞入了威胁区域将面临被击落或坠毁的危险以至于无法到达终点,记为 L p a t h = ∞ L_{path}=\infty Lpath=∞,但是无穷函数在实际问题中很难表示,我们采用惩罚的方式进行处理。一般情况下,为了利用地形覆盖自身位置,无人机应尽可能降低高度这可以帮助自身避免一些未知雷达等威胁。但是太低的飞行高度同样会加大无人机同山体和地面的撞击几率,因此设定稳定的飞行高度是非常重要的。飞行高度不应该有太大的变化,稳定的飞行高度可以减少控制系统的负担,节省更多的燃料 。为了使无人机飞行更加安全,给出的飞行高度模型:
{ h h e i g h t = 1 n ∑ i = 0 n − 1 ( z ( i ) − z ‾ ) 2 z ‾ = 1 n ∑ i = 0 n − 1 z ( i ) (5) \begin{cases} h_{height}=\sqrt{\frac{1}{n}\sum_{i=0}^{n-1}(z(i)-\overline{z})^2}\\ \overline{z}=\frac{1}{n}\sum_{i=0}^{n-1}z(i) \end{cases}\tag{5} {hheight=n1∑i=0n−1(z(i)−z)2z=n1∑i=0n−1z(i)(5)
无人机的可操作性也受到其转角代价函数的限制。,在飞行过程中无人机的转角应不大于其预先设定的最大转角,转角的大小会影响其飞行的稳定性。本文的研究中,设定最大转角为 Φ Φ Φ,当前转角为 θ \theta θ并且 a i a_i ai是第 i i i段航路段向量。
{ c o s θ = a i T a i + 1 ∣ a i ∣ ∣ a i + 1 ∣ J t u r n = ∑ i = 1 n ( c o s ( Φ − c o s θ ) ) (6) \begin{cases} cos\theta =\frac{a_i^Ta_{i+1}}{|a_i||a_{i+1}|}\\ J_{turn}=\sum_{i=1}^n(cos(\Phi-cos\theta)) \end{cases}\tag{6} {cosθ=∣ai∣∣ai+1∣aiTai+1Jturn=∑i=1n(cos(Φ−cosθ))(6)
其中, ∣ a ∣ |a| ∣a∣代表矢量 a a a的长度。
? 通过对以上三个方面建立了无人机航迹规划的代价函数,可以得出本文的航迹评价函数如下:
J c o s t = w 1 L p a t h + w 2 h h e i g h t + w 3 J t u r n (7) J_{cost}=w_1L_{path}+w_2h_{height}+w_3J_{turn} \tag{7} Jcost=w1Lpath+w2hheight+w3Jturn(7)
其中, J c o s t J_{cost} Jcost是总的代价函数,参数 w i w_i wi , i = 1 , 2 , 3 i=1,2,3 i=1,2,3 表示每个代价函数的权值,且满足如下条件:
{ w i ≥ 0 ∑ i = 1 3 w i = 1 (8) \begin{cases} w_i\geq0 \\ \sum_{i=1}^3 w_i=1 \end{cases} \tag{8} {wi≥0∑i=13wi=1(8)
通过对总的代价函数进行有效地处理,我们可以得到由线段组成的航迹。不可否认的是得到的路径往往是仅在理论上可行,但为了实际可飞,有必要对航迹进行平滑处理。本文采用三次样条插值的方法对路径进行平滑。
4.实验结果
4.1地图创建
设置地图参数a, b, c, d, e, f , g=1。地图大小为:200*200。设置三个山峰,山峰信息如表1所示。威胁区域信息如表2所示
| 信息 | 山峰中心坐标 | 山峰高度 | 山峰X方向坡度 | 山峰y方向坡度 |
|---|---|---|---|---|
| 山峰1 | [60,60] | 50 | 20 | 20 |
| 山峰2 | [100,100] | 60 | 30 | 30 |
| 山峰3 | [150,150] | 80 | 20 | 20 |
| 信息 | 威胁区域中心坐标 | 威胁区域半径 |
|---|---|---|
| 威胁区域1 | [150,50] | 30 |
| 威胁区域2 | [50,150] | 20 |
创建的地图如下:

4.2 航迹规划
设置起点坐标为[0,0,20],终点坐标为[200,200,20]。利用厨师算法对航迹评价函数式(7)进行优化。优化结果如下:

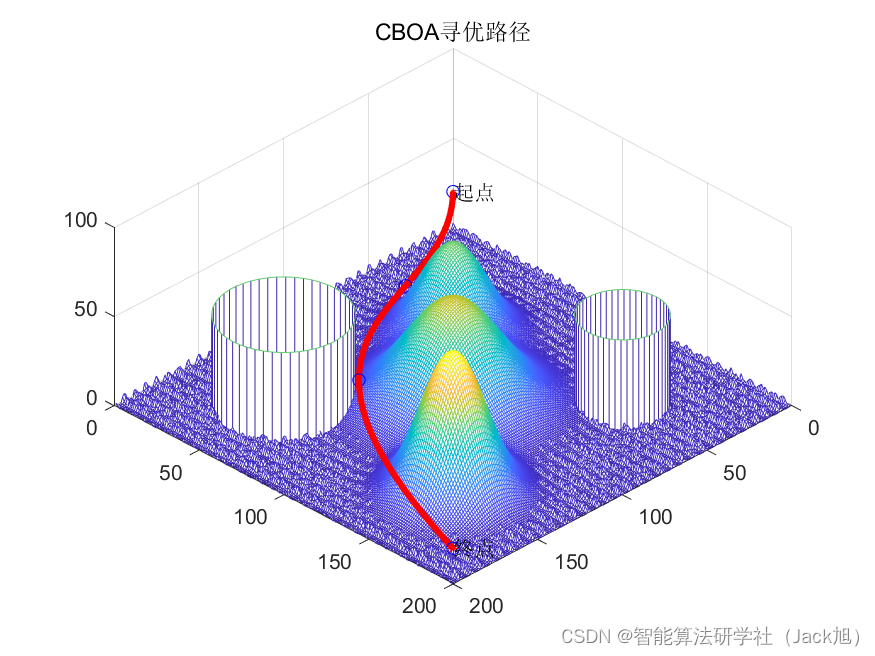
从结果来看,厨师算法规划出了一条比较好的路径,表明算法具有一定的优势。
5.参考文献
[1]薛建凯. 一种新型的群智能优化技术的研究与应用[D].东华大学,2020.DOI:10.27012/d.cnki.gdhuu.2020.000178.
6.Matlab代码
相关文章:
基于厨师算法的无人机航迹规划-附代码
基于厨师算法的无人机航迹规划 文章目录 基于厨师算法的无人机航迹规划1.厨师搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用厨师算法来优化无人机航迹规划。 1.厨师搜索算法 …...

设计模式的六大原则
1、开闭原则(Open Close Principle) 开闭原则的意思是:对扩展开放,对修改关闭。在程序需要进行拓展的时候,不能去修改原有的代 码,实现一个热插拔的效果。简言之,是为了使程序的扩展性好&…...

原文远知行COO张力加盟逐际动力 自动驾驶进入视觉时代?
11月7日,通用足式机器人公司逐际动力LimX Dynamics官宣了两位核心成员的加入。原文远知行COO张力出任逐际动力联合创始人兼COO,香港大学长聘副教授潘佳博士为逐际动力首席科学家。 根据介绍,两位核心成员的加入,证明一家以技术驱…...

【公益案例展】火山引擎公益电子票据服务——连接善意,共创美好
火山引擎公益案例 本项目案例由火山引擎投递并参与数据猿与上海大数据联盟联合推出的 #榜样的力量# 《2023中国数据智能产业最具社会责任感企业》榜单/奖项”评选。 大数据产业创新服务媒体 ——聚焦数据 改变商业 捐赠票据是慈善组织接受捐赠后给捐赠方开具的重要凭证&…...
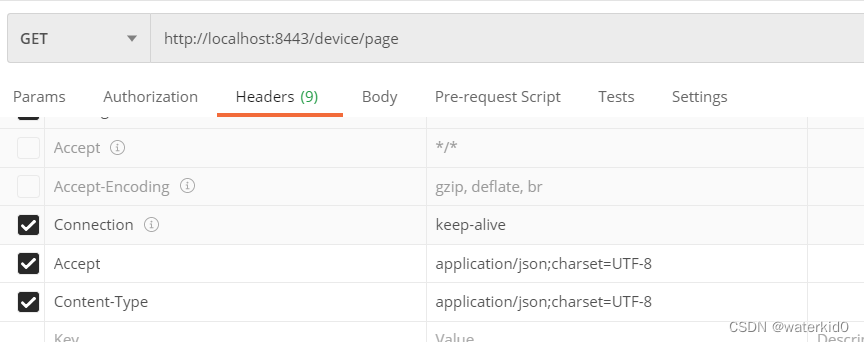
postman中文乱码
在header中添加这两个: Content-Type application/json;charsetUTF-8 Accept application/json;charsetUTF-8...

设计模式简要介绍
设计模式有很多,较为重要的如下 静态和单例模式 单例模式的本质就是类成员中有一个对象实例 public class Animal{public static string Title "Animal" // 类成员public string Name; // 对象成员public const float Pi 3.14f; // 类成员public rea…...
)
LeetCode-232. 用栈实现队列(C++)
目录捏 一、题目描述二、示例与提示三、思路四、代码 一、题目描述 请你仅使用两个栈实现先入先出队列。队列应当支持一般队列支持的所有操作(push、pop、peek、empty): 实现 MyQueue 类: void push(int x) 将元素 x 推到队列的…...

无人机红外相机的畸变矫正
在项目开展过程中,发现大疆M30T的红外相机存在比较明显的畸变问题,因此需要对红外图像进行畸变矫正。在资料检索过程中,发现对红外无人机影像矫正的资料较少,对此,我从相机的成像原理角度出发,探索出一种效…...
C++编程案例讲解-基于结构体的控制台通讯录管理系统
基于结构体的控制台通讯录管理系统 通讯录是一个可以记录亲人、好友信息的工具,系统中需要实现的功能如下: 添加联系人:向通讯录中添加新人,信息包括(姓名、性别、年龄、联系电话、家庭住址)最多记录1000人…...

ASP.NETCore6开启文件服务允许通过url访问附件(图片)
需求背景 最近在做一个工作台的文件上传下载功能,主要想实现上传图片之后,可以通过url直接访问。由于url直接访问文件不安全,所以需要手动开启文件服务。 配置 文件路径如下,其中Files是存放文件的目录: 那么&…...
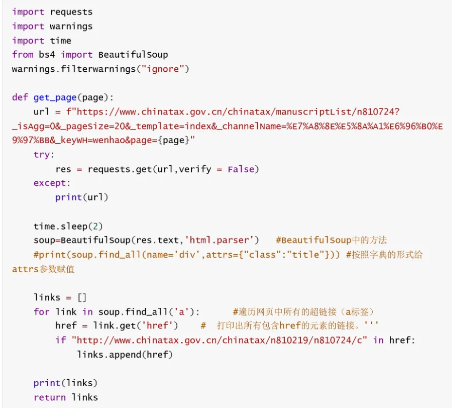
python爬取Web of science论文信息
一、python爬取WOS总体思路 (一)拟实现功能描述 wos里面,爬取论文的名称,作者名称,作者单位,引用数量 要求:英文论文、期刊无论好坏 检索关键词:zhejiang academy of agricultural sciences、 xianghu lab…...
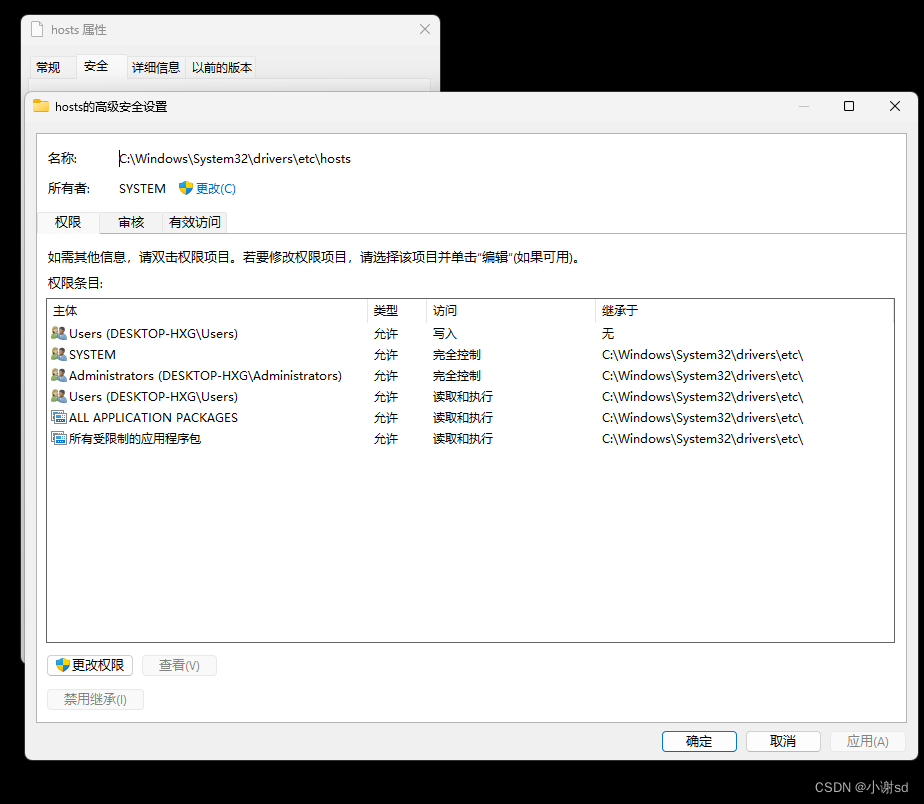
本地域名 127.0.0.1 / localhost
所谓本地域名就是 只能在本机使用的域名 ,一般在开发阶段使用。 编辑文件 C:\Windows\System32\drivers\etc\hosts。 127.0.0.1 www.baidu.com如果修改失败,可以修改该文件的权限。 原理: 在地址栏输入 域名 之后,浏览器会先进行 DNS…...

Python —— 不同类型的数据长度计算方式
在Python 中,不同类型的数据长度计算方式,有何不同👇 字符串(String) my_string "Hello, World!" string_length len(my_string) print("字符串的长度是:", string_length) //输出…...
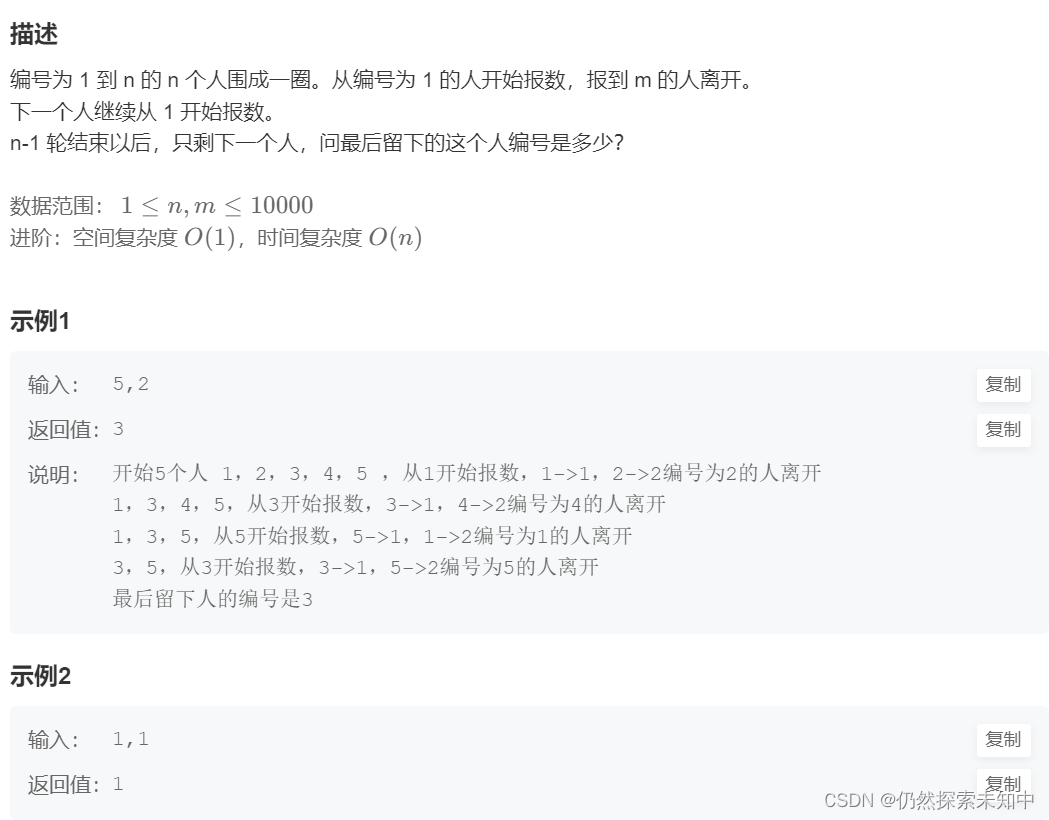
NowCoder | 环形链表的约瑟夫问题
NowCoder | 环形链表的约瑟夫问题 OJ链接 思路: 创建带环链表带环链表的删除节点 代码如下: #include<stdlib.h>typedef struct ListNode ListNode; ListNode* ListBuyNode(int x) {ListNode* node (ListNode*)malloc(sizeof(ListNode));node…...

华为政企数据中心网络交换机产品集
产品类型产品型号产品说明 核心/汇聚交换机CE8850-EI-B-B0BCloudEngine 8850-64CQ-EI 提供 64 x 100 GE QSFP28,CloudEngine 8800系列交换机是面向数据中心推出的新一代高性能、高密度、低时延灵活插卡以太网交换机,可以与华为CloudEngine系列数据中心…...

多门店自助点餐+外卖二合一小程序源码系统 带完整搭建教程
随着餐饮业的快速发展和互联网技术的不断进步,越来越多的餐厅开始采用自助点餐和外卖服务。市场上许多的外卖小程序APP应运而生。下面罗峰来给大家介绍一款多门店自助点餐外卖二合一小程序源码系统。该系统结合了自助点餐和外卖服务的优势,为餐厅提供了一…...
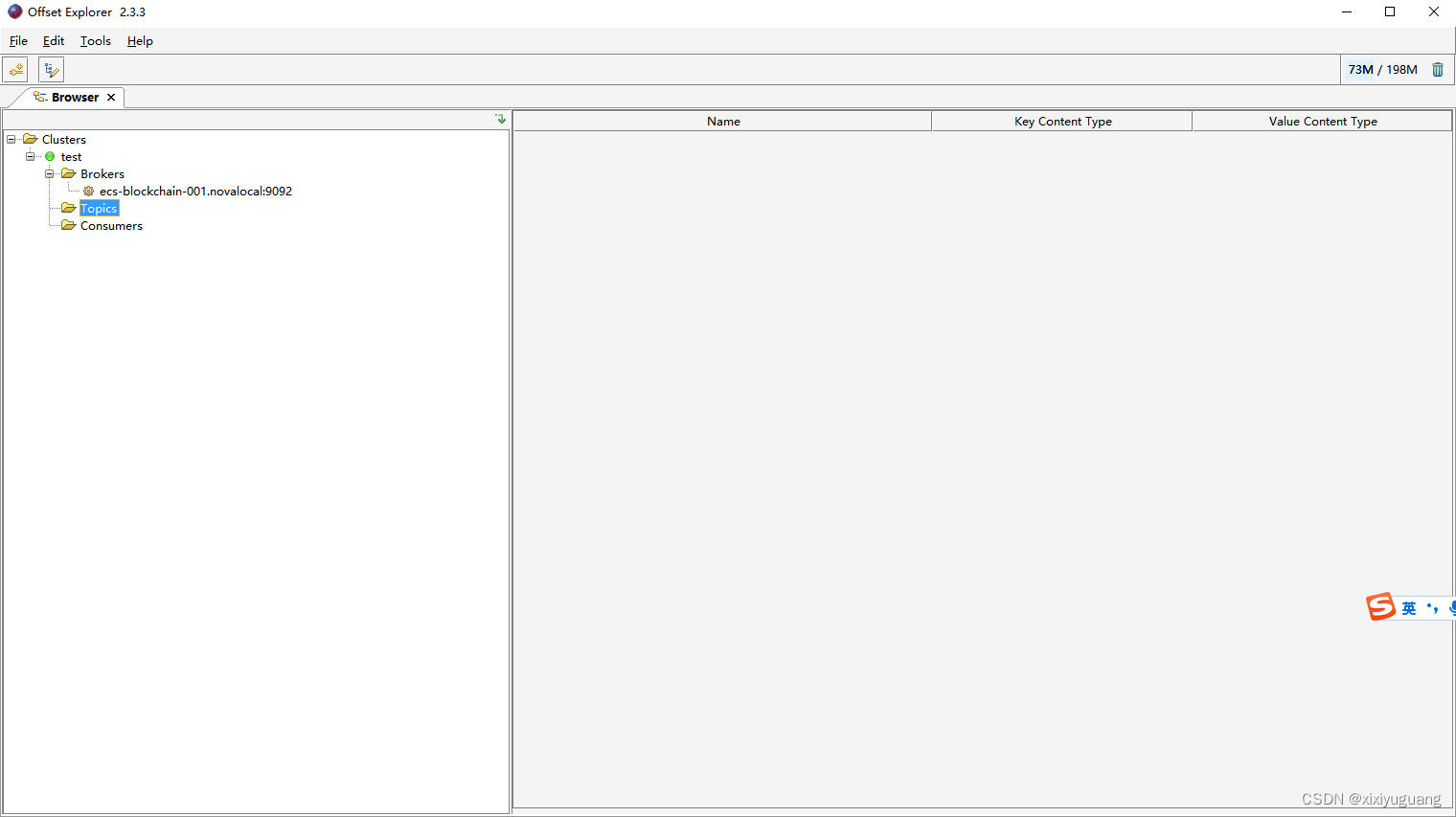
kafka可视化工具
Offset Explorer kafka可视化工具...

Excel 转 Json 、Node.js实现(应用场景:i18n国际化)
创作灵感来源于在线转换是按照换行符去转换excel内容换行符后很难处理 本文是按单元格转换 const xlsx require(node-xlsx) const fs require(fs) const xlsxData xlsx.parse(./demo.xlsx) // 需要转换的excel文件// 数据处理 方便粘贴复制 const data xlsxData[2].data …...
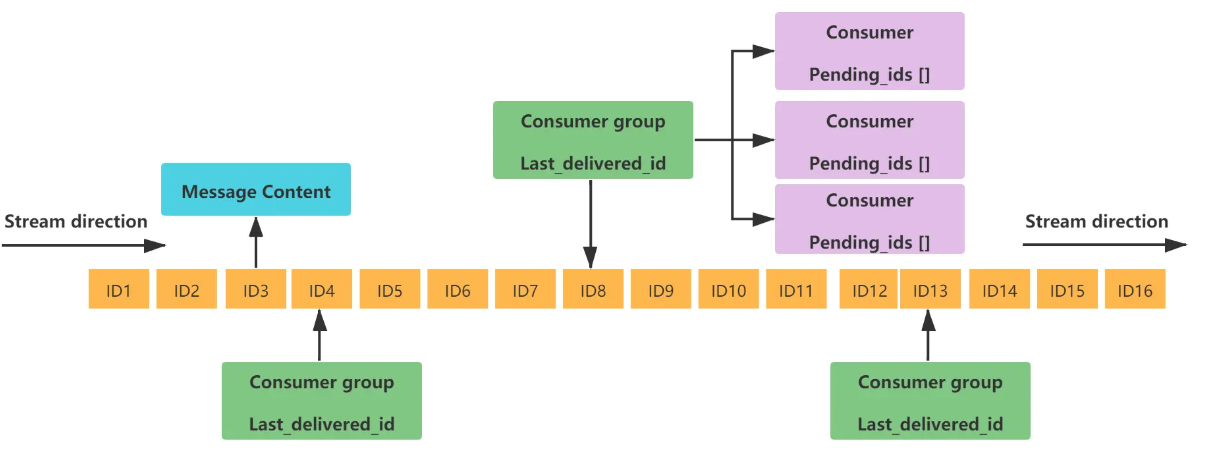
Redis7--基础篇2(Redis的十大数据类型及常用命令)
1. Redis的十大数据类型及常用命令 Redis是key-value键值对类型的数据库,我们所说的数据类型指的是value的数据类型,key的数据类型都是字符串。 1.1 字符串(String) string是redis最基本的类型,一个key对应一个val…...

1.HTML中网页介绍
1.网页 1.1 什么是网页 网站是指在因特网上根据一定的规则,使用HTML等制作的用于展示特定内容的相关的网页集合 网页是网站中的一“页”,通常是HTML格式文件,它要通过浏览器来阅读。 网页是构成网站的基本元素,它通常是有图片&am…...
混合储能采用低通滤波...)
蓄电池与超级电容混合储能并网matlab/simulink仿真模型 (1)混合储能采用低通滤波...
蓄电池与超级电容混合储能并网matlab/simulink仿真模型 (1)混合储能采用低通滤波器进行功率分配,可有效抑制功率波动,并对超级电容的soc进行能量管理,soc较高时多放电,较低时少放电,soc较低时状…...

【无线通信】多载波无线通信系统设计Matlab仿真
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。 👇 关注我领取海量matlab电子书和数学建模资料 🍊个人信条:格物致知,完整…...

暗黑3技能自动化释放:告别机械操作,重燃战斗激情 - 基于AutoHotkey的智能宏工具实现
暗黑3技能自动化释放:告别机械操作,重燃战斗激情 - 基于AutoHotkey的智能宏工具实现 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelpe…...

Magisk模块开发实战指南:从基础架构到高级功能实现
Magisk模块开发实战指南:从基础架构到高级功能实现 【免费下载链接】Magisk The Magic Mask for Android 项目地址: https://gitcode.com/GitHub_Trending/ma/Magisk Magisk模块开发是Android系统定制领域的核心技术,它通过独特的挂载机制让开发者…...

关于初次学习的c语言心得
我是一名大一下的学生,双非二本,因为一些原因休学了两年,现在正在努力学习c语言目标成为公司里面所谓的精通编程,学习c语言的过程每天坚持三小时以上,希望能进入像京东,华为等公司,我也想挣钱买…...

AI SaaS创业:从0到1打造爆款产品的核心方法论
市场定位与需求验证通过数据分析和用户访谈验证目标市场的真实需求。使用工具如Google Trends、SEMrush分析搜索热度,结合用户调研(SurveyMonkey、Typeform)明确痛点。避免主观假设,确保产品解决高频、高价值问题。最小可行产品&a…...

探索NextDNS Config:优化你的DNS配置以提升网络性能
探索NextDNS Config:优化你的DNS配置以提升网络性能 是一个开源项目,旨在帮助用户轻松地管理并优化其设备上的NextDNS设置。该项目由Yokoffing开发,并提供了多种平台(包括路由器、Android和iOS)的配置文件,…...

告别穿模与漂移!南洋理工团队提出HMR新框架:用视觉大模型对齐人体姿态
点击下方卡片,关注「3D视觉工坊」公众号选择星标,干货第一时间送达本文一作投稿发布 | 来源:3D视觉工坊「3D视觉从入门到精通」知识星球(点开有惊喜) !星球内有20多门3D视觉系统课程、300场顶会讲解、顶会论文最新解读、海量3D视觉…...

OpenClaw截图分析进阶:千问3.5-9B识别UI元素与操作建议
OpenClaw截图分析进阶:千问3.5-9B识别UI元素与操作建议 1. 为什么需要截图分析能力? 上周我在测试一个内部工具时遇到了一个典型问题——某个按钮在特定分辨率下会消失不见。手动排查需要反复调整窗口尺寸并肉眼检查,效率极低。这时我想到了…...

OpenClaw自动化测试:Kimi-VL-A3B-Thinking多模态交互验证框架
OpenClaw自动化测试:Kimi-VL-A3B-Thinking多模态交互验证框架 1. 为什么需要AI驱动的自动化测试 去年接手一个客户端项目时,我遇到了一个典型痛点——每次发版前的手动回归测试需要3个人天。更麻烦的是,UI微调导致的视觉差异很难通过传统断…...