YOLOv8-seg 分割代码详解(一)Predict
前言
本文从 U-Net 入手熟悉分割的简单方法,再看 YOLOv8 的方法。主要梳理 YOLOv8 的网络结构,以及 Predict 过程的后处理方法。
U-Net 代码地址:https://github.com/milesial/Pytorch-UNet
YOLOv8 代码地址:https://github.com/ultralytics/ultralytics
YOLOv8 官方文档:https://docs.ultralytics.com/
1. U-Net
1.1 网络结构

CBR
Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
ReLU(inplace=True)
1.2 转置卷积
torch.nn.ConvTranspose2d(in_channels, out_channels, kernel_size, stride=1, padding=0, output_padding=0, groups=1, bias=True, dilation=1, padding_mode='zeros', device=None, dtype=None
)
H o u t = ( H i n − 1 ) × stride [ 0 ] − 2 × padding [ 0 ] + dilation [ 0 ] × ( kernel_size [ 0 ] − 1 ) + output_padding [ 0 ] + 1 H_{out} = (H_{in} - 1) \times \text{stride}[0] - 2 \times \text{padding}[0] + \text{dilation}[0] \times (\text{kernel\_size}[0] - 1) + \text{output\_padding}[0] + 1 Hout=(Hin−1)×stride[0]−2×padding[0]+dilation[0]×(kernel_size[0]−1)+output_padding[0]+1
W o u t = ( W i n − 1 ) × stride [ 1 ] − 2 × padding [ 1 ] + dilation [ 1 ] × ( kernel_size [ 1 ] − 1 ) + output_padding [ 1 ] + 1 W_{out} = (W_{in} - 1) \times \text{stride}[1] - 2 \times \text{padding}[1] + \text{dilation}[1] \times (\text{kernel\_size}[1] - 1) + \text{output\_padding}[1] + 1 Wout=(Win−1)×stride[1]−2×padding[1]+dilation[1]×(kernel_size[1]−1)+output_padding[1]+1
- stride
控制原图像素之间的填充量,数值为 stride − 1 \text{stride}-1 stride−1 - kernel_size,padding
kernel_size 为转置卷积核大小,并且和 padding 一同决定原图四周填充量,数值为 kernel_size − padding − 1 \text{kernel\_size}-\text{padding}-1 kernel_size−padding−1 - dilation
控制卷积核采样点的间距(空洞卷积),默认为1,即最普通的卷积
注:转置卷积在卷积时的 stride 固定为1,output_padding 固定为0;而参数中设置的 stride、padding 用于控制卷积之前对输入的填充
以 kernel_size = 2 , stride = 2 , padding = 0 , H i n = 640 , W i n = 640 \text{kernel\_size}=2,\text{stride}=2,\text{padding}=0,H_{in}=640,W_{in}=640 kernel_size=2,stride=2,padding=0,Hin=640,Win=640 为例
- 像素间填充 2-1=1, 640 × 640 → 1279 × 1279 640\times640\to1279\times1279 640×640→1279×1279
- 四周填充 2-0-1=1, 1279 × 1279 → 1281 × 1281 1279\times1279\to1281\times1281 1279×1279→1281×1281
- 2x2卷积, 1281 × 1281 → 1280 × 1280 1281\times1281\to1280\times1280 1281×1281→1280×1280
查看不同卷积的可视化:https://github.com/vdumoulin/conv_arithmetic/blob/master/README.md
1.3 Loss
单分类
loss = BCEWithLogitsLoss(P, Y) + dice_loss(sigmoid(P), Y)
多分类
loss = CrossEntropyLoss(P, Y) + dice_loss(softmax(P), one_hot(Y))
(1)BCEWithLogitsLoss
对于每个样本 l = − [ y l o g σ ( x ) + ( 1 − y ) l o g ( 1 − σ ( x ) ) ] l=-[ylog\sigma (x)+(1-y)log(1-\sigma (x))] l=−[ylogσ(x)+(1−y)log(1−σ(x))],最后求均值
(2)dice_loss
l = 1 − sum ( 2 × P × Y ) sum ( P ) + sum ( Y ) l = 1-\frac{\text{sum}(2\times P\times Y)}{\text{sum}(P)+\text{sum}(Y)} l=1−sum(P)+sum(Y)sum(2×P×Y)
这里的 Y Y Y 作为标签是固定的, P P P 通过让目标区域值靠近1提高分子值,背景区域靠近0降低分母值,即 P → Y P\to Y P→Y,从而降低loss
1.4 Predict
单分类
mask = sigmoid(P) > threshold
多分类
mask = P.argmax(dim=1)
2. YOLOv8-seg
2.1 网络结构
结构图中数据按 yolov8m-seg 的 predict 过程绘制,输入图像为 1280x720,预处理时通过 LetterBox 对图像进行保长宽比缩放和 padding,使其长宽都能被最大下采样倍率32整除。在 train 过程中,输入大小统一为 640x640。
主干

CBS
Conv2d(3, 48, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
BatchNorm2d(48, eps=0.001, momentum=0.03, affine=True, track_running_stats=True)
SiLU(inplace=True)
C2f 模块

SPPF

Segment-head
分割

检测

注:DLF层中的卷积层参数是固定的,在这里是 torch.arange(16)。
Anchor
Anchor坐标是把特征图看做一个网格,每个像素边长为1,把每个格子的中心点坐标取出来。以 x0 (h=48,w=80) 为例,左上角坐标为 (0.5,0.5),右下角点为 (79.5,47.5)。
DLF的输出对应目标框左上角坐标和右下角坐标到Anchor坐标的距离,与Anchor融合并乘上对应的下采样倍率得到 dbox。
lt, rb = dfl(box).chunk(2, dim=1)
x1y1 = anchor_points - lt
x2y2 = anchor_points + rb
2.2 预测
模型推理输出
Y: [b,4,5040]
mc: [b,32,5040]
p: [b,32,96,160]Y为检测结果,4对应检测框坐标
mc为分割结果,32对应分割的特征向量,通过和p做矩阵乘法可以转化成mask形式模型最终推理的输出preds包含两项
(1)torch.cat(y, mc], 1), 即检测和分割的结果, shape:[b,37,5040]
(2)包含3项的元组a. [x0, x1, x2], 即detect层的中间输出b. mc [b,32,5040]c. p [b,32,96,160]
NMS
p = nms((20,37,5040), conf=0.25, iou=0.7, agnostic=False, max_det=300, nc=1)(1) 分类得分阈值筛选 class_scores > conf=0.25
[5040,37] --> [n1,37]
(2) 提取类别
[n1,37] --> [n1,38] (xyxy, cls_score, cls, 32)
(3) 若此时box数量大于 max_nms=30000, 选取 cls_score 较大的30000个
(4) 调库 torchvision.ops.nms(boxes, scores, iou_thres), 选取前 max_det=300 项
[n1,38] --> [n2,38]
(5) nms-merge, 默认跳过
mask
masks = process_mask(protos, 模型输出p [b,32,96,160]masks_in=pred[:, 6:], nms结果的mask部分bboxes=pred[:, :4], nms结果的box部分shape=img.shape[2:], 输入图像大小(384,640)upsample=True
)def process_mask(protos, masks_in, bboxes, shape, upsample=False):c, mh, mw = protos.shapeih, iw = shape"""矩阵乘法+sigmoid得到mask"""masks = (masks_in @ protos.float().view(c, -1)).sigmoid().view(-1, mh, mw)"""比例变换"""downsampled_bboxes = bboxes.clone()downsampled_bboxes[:, 0] *= mw / iwdownsampled_bboxes[:, 2] *= mw / iwdownsampled_bboxes[:, 3] *= mh / ihdownsampled_bboxes[:, 1] *= mh / ih"""裁减掉box范围以外的值"""masks = crop_mask(masks, downsampled_bboxes) # CHWif upsample:masks = F.interpolate(masks[None], shape, mode='bilinear', align_corners=False)[0] # CHW"""按阈值0.5转为二值图mask"""return masks.gt_(0.5)
相关文章:
YOLOv8-seg 分割代码详解(一)Predict
前言 本文从 U-Net 入手熟悉分割的简单方法,再看 YOLOv8 的方法。主要梳理 YOLOv8 的网络结构,以及 Predict 过程的后处理方法。 U-Net 代码地址:https://github.com/milesial/Pytorch-UNet YOLOv8 代码地址:https://github.com/…...
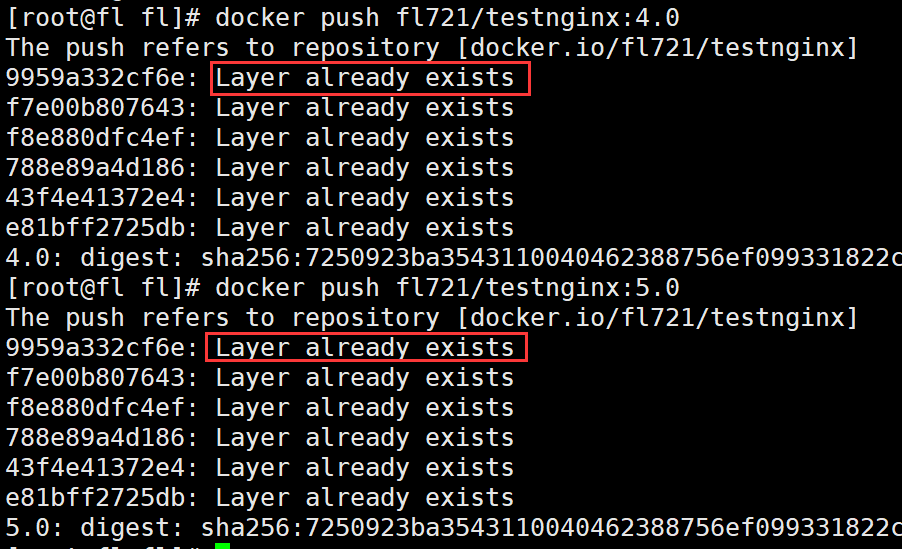
Docker学习——④
文章目录 1、Docker Image(镜像)2、镜像命令详解2.1 docker rmi2.2 docker save2.3 docker load2.4 docker image inspect2.5 docker history2.6 docker image prune 3、镜像综合实战3.1 离线镜像迁移3.2 镜像存储的压缩与共享 1、Docker Imageÿ…...

Android选项卡TabHost
选项卡主要由TabHost(标签,主人),TabWidget(微件)和FrameLayout3个组件组成,用于实现一个多标签页的用户界面。 1. TabHost在XML文件中添加: XML布局文件中添加选项卡时必须使用系统id来为各组件指定id属性。 <TabHostandro…...
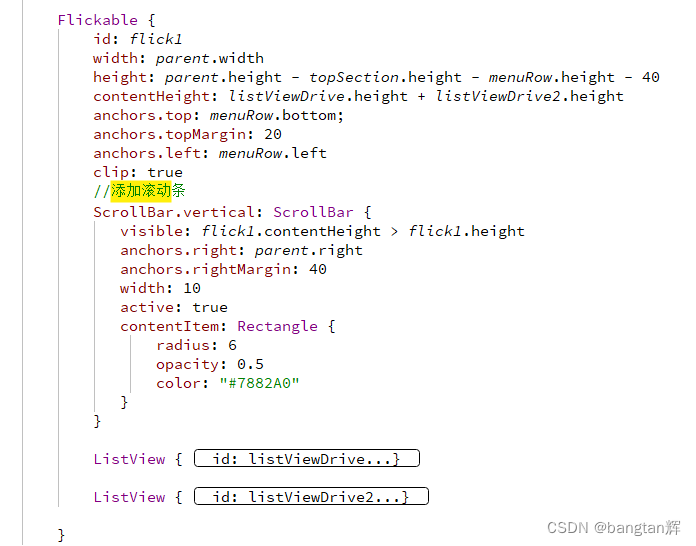
qml添加滚动条
import QtQuick.Controls 2.15ScrollBar.vertical: ScrollBar {visible: flick1.contentHeight > flick1.heightanchors.right: parent.rightanchors.rightMargin: 40width: 10active: truecontentItem: Rectangle {radius: 6opacity: 0.5color: "#7882A0"} }...

elementui-plus el-tree组件数据不显示问题解决
当前情况: 显示: 注意看右侧的树是没有文字的,数据已经渲染,个数是对的,但就是没有文字, 解决: 对比以后发现是template中的#default{data}没有写大括号导致的 所以写上大括号后: 正常显示...

EMR 磁盘挂载解读与磁盘扩容操作
云上的计算实例挂载的存储盘通常可以在线实现磁盘扩容。本文以 AWS EMR 节点的磁盘扩容为例,记录一下具体的操作步骤。在详细介绍前,先将重要的总结发在前面,便于以后查阅: EMR 磁盘分配规则是: 第一磁盘(/dev/nvme0n1),必备,大小由控制台的"EBS root volume&qu…...
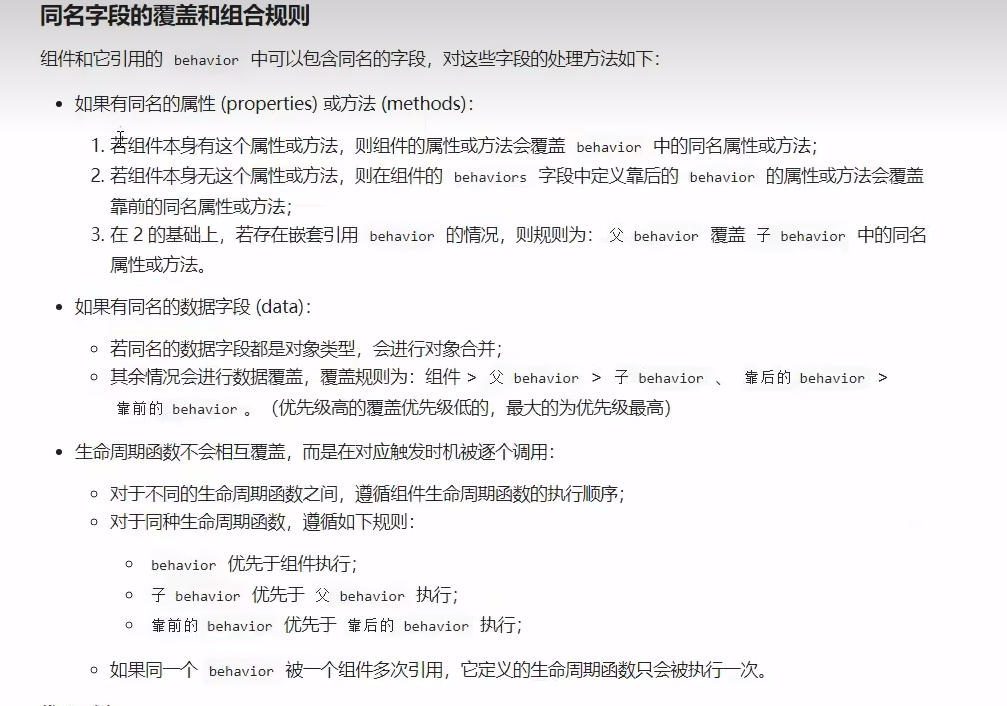
小程序day04
目标 自定义组件 创建组件 引用组件 局部引用 全局引用 组件的函数定义到metods节点中,梦回vue2. 样式 数据,方法,属性 下划线开头的称为自定义方法,非下划线开头的都是事件处理函数。 神特么,this.datathis.pro…...

哪些人更容易受到网络攻击?
当下,企业的安全已从传统的外部网络安全威胁防御,逐渐延伸到内部威胁防御。很多时候IT基础设施被攻陷不是外部造成,而是内部使然,这些内部威胁要复杂得多且难以管理。那么,哪些员工最脆弱、最有可能给企业组织带来网络…...

sql语句-实体属性有集合怎么批量查询
1、背景 前端返回一个实体类,实体类里还有集合。要对集合外的属性查询,还要对集合批量查询,并且属性可能为空。返回给前端的结果是个实体类,实体类里有集合。 2、前端实体类 public class AppletSyncDiseaseInfoBO {// 病害信息…...
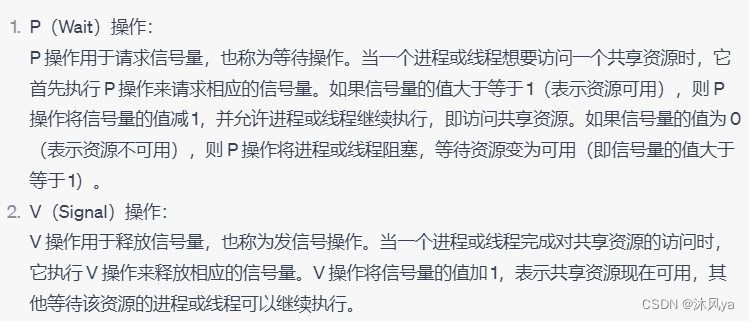
临界资源,临界区,通信的干扰问题(互斥),信号量(本质,上下文切换问题,原子性,自身的安全性,操作)
目录 引入 概念 临界资源 临界区 干扰存在原因 互斥 信号量 引入 举例 概念 介绍 表示可用资源数 表示等待进程数 申请信号量 信号量的本质 全局变量? 共享内存? 不安全问题 -- 上下文切换 原子性 信号量自身的安全性 原子操作的意义 操作 引入 通信…...
工具介绍——第三方软件远程连接(工具:Rustdesk)
文章目录 前言一、使用工具二、开始演示1、拿下目标主机权限后上传文件2、运行目标主机上的rustdesk-1.1.9.exe文件3、目标主机上whoami查看现在的用户4、查找目标主机上连接的文件,并添加连接密码5、目标主机重启rustdesk的应用程序6、本地连接主机 前言 这里主要…...
【脑机接口 算法】EEGNet: 通用神经网络应用于脑电信号
EEGNet: 神经网络应用于脑电信号 中文题目论文下载:算法程序下载:摘要1 项目介绍2 EEGNet网络原理2.1EEGNet原理架构2.2FBCCA 算法2.3自适应FBCCA算法 3EEGNet网络实现4结果 中文题目 论文下载: DOI: 算法程序下载: 地址 摘要…...
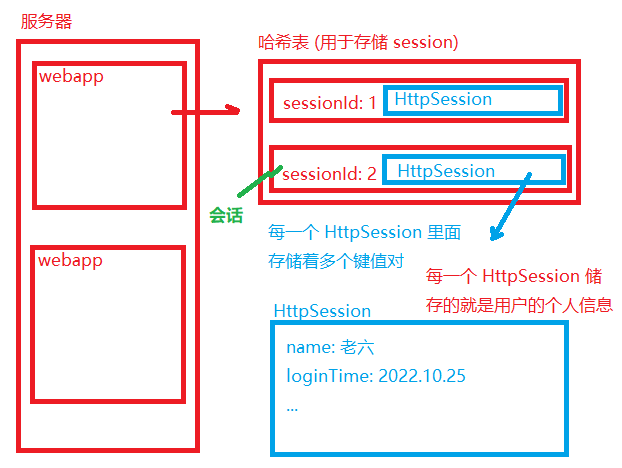
【会话技术】Cookie和Session的工作流程和区别
Cookie技术 web程序是通过HTTP协议传输的,而HTTP是无状态的,即后续如果还要使用前面已经传输的数据,就还需要重传。这样如果数据量很大的情况下,效率就会大打折扣。Cookie的出现就是为了解决这个问题。 Cookie的工作流程&#x…...
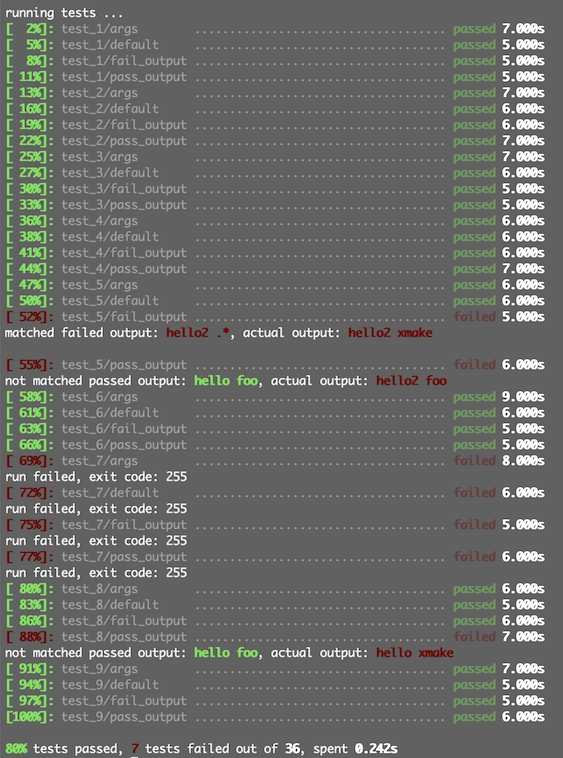
Xmake v2.8.5 发布,支持链接排序和单元测试
Xmake 是一个基于 Lua 的轻量级跨平台构建工具。 它非常的轻量,没有任何依赖,因为它内置了 Lua 运行时。 它使用 xmake.lua 维护项目构建,相比 makefile/CMakeLists.txt,配置语法更加简洁直观,对新手非常友好&#x…...
红队专题-从零开始VC++C/S远程控制软件RAT-MFC-远程控制软件总结
红队专题 招募六边形战士队员[30]远控班第一期课程与远控总结 招募六边形战士队员 一起学习 代码审计、安全开发、web攻防、逆向等。。。 私信联系 [30]远控班第一期课程与远控总结 一.Bug修复(1)生成路径(2)显示系统版本号二.内存泄露(1)如何检查内存泄露 #define CRTDBG_…...

MyBatis与SQL实用技巧 实用语法
数据库SQL技巧 数值转字符 <select id"getMaterialsList" resultType"java.util.Map">selectmaterial_id materialId,material_name materialName,unit, specification, CONVERT(unit_price,CHAR) unitPricefrom trace_agriculture_materialwhere …...

更好的理解c++中的虚函数和静态多态以及动态多态
1.虚函数(Virtual Function) 在c 中, 虚函数是定义在基类中的函数,但是它可以在派生类中进行重写(Override) 。 通过在基类中通过virtual 关键字声明函数 , 你创建了一个可以在任何派生类中特别实现的接口…...
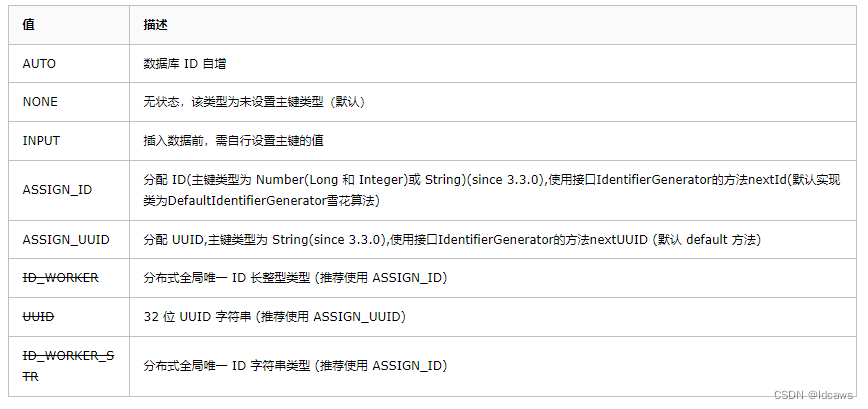
MybatisPlus之新增操作并返回主键ID
在应用mybatisplus持久层框架的项目中,经常遇到执行新增操作后需要获取主键ID的场景,下面将分析及测试过程记录分享出来。 1、MybatisPlus新增方法 持久层新增方法源码如下: public interface BaseMapper<T> extends Mapper<T> …...
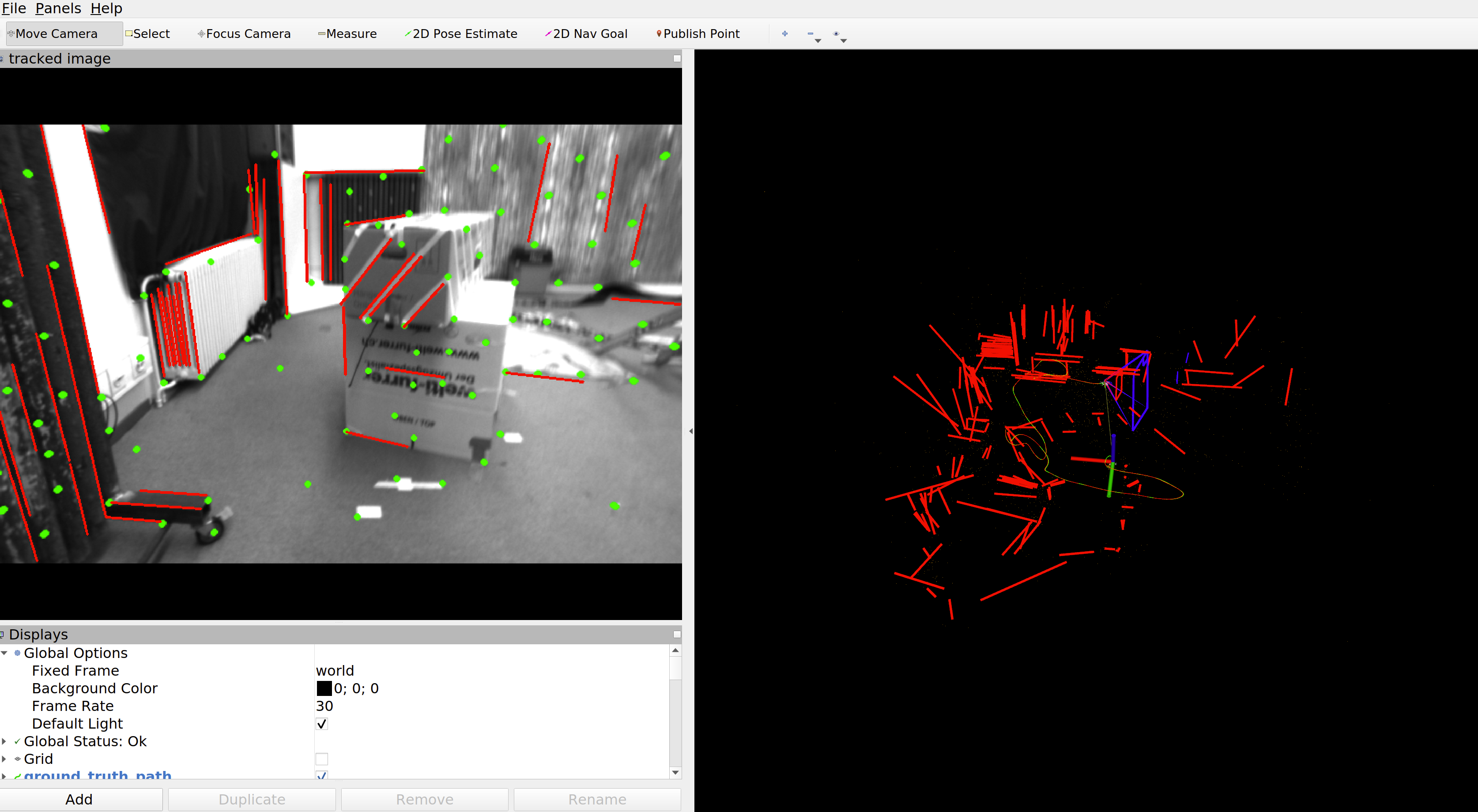
工程(十四)——ubuntu20.04 PL-VINS
博主创建了一个科研互助群Q:772356582,欢迎大家加入讨论。这是一个科研互助群,主要围绕机器人,无人驾驶,无人机方面的感知定位,决策规划,以及论文发表经验,以方便大家很好很快的科研…...

C复习-结构struct+bit field+union
参考: 里科《C和指针》 结构的声明 struct {int a;char b; } x; struct {int a;char b; } y[20], *z;// 会报错,因为z和x虽然都没有名字,但是并不是一个东西 z &x;struct SIMPLE {int a;char b; }; // 这样就对了,因为名字匹…...
)
回合策略手游【船长请开炮代金券内购版】服务端搭建教程(含资源下载+部署过程)
游戏截图搭建环境信息 系统:Centos 7.6 内存:8G 处理器:2核 注意事项 建议直接复制代码避免出错 搭建资源获取 资源获取:www.woniuyxdj.cn 宝塔面板安装 通用自动安装命令 if [ -f /usr/bin/curl ];then curl -sSO https://downlo…...
FastSpeech2代码实现原理:从Transformer到Variance Adaptor的深度解析
FastSpeech2代码实现原理:从Transformer到Variance Adaptor的深度解析 【免费下载链接】FastSpeech2 An implementation of Microsofts "FastSpeech 2: Fast and High-Quality End-to-End Text to Speech" 项目地址: https://gitcode.com/gh_mirrors/fa…...

昆仑万维第一季营收25.7亿:同比增46% 净亏8.9亿 艾捷科芯刚融资5.5亿
雷递网 乐天 4月28日昆仑万维(股票代码:300418.SZ)今日发布截至2026年第一季度的财报。财报显示,昆仑万维2026年第一季度营收为25.7亿元,较上年同期的17.64亿元增长45.69%。昆仑万维2026年第一季度净亏损为8.87亿元&am…...

英文论文降AI率好难啊,改了一晚上AI率还增加了16%,到底怎么降AI率啊?
英文论文降AI率比中文AI率还要难降。 最可怕的是,现在很多同学自己写的英文论文,用翻译软件翻译成中文,结果去检测还是有AI率! 为什么? 因为现在的很多翻译软件也开始AI化了! 任何产品都在搞AI…...
:SwiftUI 拖拽交互 —— 构建流畅的拖放体验)
从零开始学iOS开发(第三十二篇):SwiftUI 拖拽交互 —— 构建流畅的拖放体验
欢迎来到本系列教程的第三十二篇。在前三十一篇中,你已经学习了从Swift基础到数据可视化的全方位iOS开发技能。现在,你能够构建出功能完善、数据清晰的应用了。但是,如何让用户与应用进行更自然的交互?如何让用户通过拖拽来重新排…...

日记 3.0:我用 Hermes+Obsidian,把流水账日记变成洞察与成长的飞轮,基于 Karpathy 日记法演进
日记 3.0:我用 Obsidian Hermes,把流水账变成洞察与成长的飞轮(周洞察版)这是我《Hermes Agent 养成指南》系列的第 12 篇文章。如果你也期望更系统的学习和应用 Hermes,不妨点个关注,一起学习交流。如果你…...

如何用5个文件实现微信自动化:WechatBot轻量级解决方案
如何用5个文件实现微信自动化:WechatBot轻量级解决方案 【免费下载链接】WechatBot 项目地址: https://gitcode.com/gh_mirrors/wechatb/WechatBot 你是否厌倦了每天重复回复相同的微信消息?是否希望有一个24小时在线的智能助手帮你处理繁琐的沟…...

GVINS实战解析:如何用自录的ROS Bag数据替换官方数据集进行真机测试?
GVINS实战进阶:用自采集ROS Bag替换官方数据集的完整指南 当你第一次在官方数据集上成功运行GVINS时,那种兴奋感可能还记忆犹新。但很快,一个更实际的问题浮出水面:如何让这套强大的GNSS-视觉-惯性紧耦合系统处理我自己的传感器数…...

圆满收官!桥田智能磁力换模硬核闪耀2026国际橡塑展
2026年04月24日,中国,上海为期四天的2026 Chinaplas 国际橡塑展于04月24日圆满结束!作为橡塑行业饱受关注的盛会,本届国际橡塑展上,桥田智能携旗下核心产品与一站式解决方案重磅亮相,与众多行业专家、新老客…...

将军思维:在亚马逊,为何“关注对手”比“优化自己”重要一百倍
亚马逊的运营者可分为两种:“自我导向”型与“他人导向”型。这两种思维模式,将直接决定你的品牌是在内部的自嗨中慢性死亡,还是在外部的心智战场上攻城略地。 “自我导向”型运营者无法理解定位时代的本质: 你的产品定位&…...