常用的三角函数公式
-
sin 2 x + cos 2 x = 1 \sin ^2 x + \cos ^2 x = 1 sin2x+cos2x=1
-
tan x = sin x cos x \tan x = \dfrac{\sin x}{\cos x} tanx=cosxsinx
-
cot x = 1 tan x = cos x sin x \cot x = \dfrac{1}{\tan x}=\dfrac{\cos x}{\sin x} cotx=tanx1=sinxcosx
-
sec x = 1 cos x \sec x= \dfrac{1}{\cos x} secx=cosx1
-
csc x = 1 sin x \csc x =\dfrac{1}{\sin x} cscx=sinx1
-
tan 2 x = sec 2 − 1 = 1 cos 2 x − 1 = 1 − cos 2 x cos 2 x = sin 2 x cos 2 x \tan^2x=\sec^2-1=\dfrac{1}{\cos^2x}-1=\dfrac{1-\cos^2x}{\cos^2x}=\dfrac{\sin^2x}{\cos^2x} tan2x=sec2−1=cos2x1−1=cos2x1−cos2x=cos2xsin2x
-
cot 2 = csc 2 x − 1 = 1 sin 2 x − 1 = 1 − sin 2 x sin 2 x = cos 2 x sin 2 x \cot^2=\csc^2x-1=\dfrac{1}{\sin^2x}-1=\dfrac{1-\sin^2x}{\sin^2x}=\dfrac{\cos^2x}{\sin^2x} cot2=csc2x−1=sin2x1−1=sin2x1−sin2x=sin2xcos2x
-
cos x = sin ( x + π 2 ) \cos x=\sin(x+\dfrac{\pi}{2}) cosx=sin(x+2π), sin x \sin x sinx 向左平移 π 2 \dfrac{\pi}{2} 2π. (左加右减)
-
sin x = cos ( x − π 2 ) \sin x=\cos(x-\dfrac{\pi}{2}) sinx=cos(x−2π)
-
cos x = cos ( − x ) \cos x= \cos(-x) cosx=cos(−x),偶函数
-
sin x = − sin ( − x ) \sin x = - \sin(-x) sinx=−sin(−x),奇函数
-
sin x = − sin ( x ± π ) \sin x= -\sin(x\pm\pi) sinx=−sin(x±π), sin x \sin x sinx无论是向左、还是向右平移 π \pi π 个单位后,乘以-1,关于x轴对称之后函数图像不变.
-
cos x = − cos ( x ± π ) \cos x = -\cos(x\pm\pi) cosx=−cos(x±π)
-
arcsin x + arccos x = π 2 \arcsin x+\arccos x=\dfrac{\pi}{2} arcsinx+arccosx=2π.
倍(半)角公式
-
cos ( A ± B ) = cos A ⋅ cos B ∓ sin A ⋅ sin B \cos(A\pm B)=\cos A\cdot\cos B \mp \sin A\cdot\sin B cos(A±B)=cosA⋅cosB∓sinA⋅sinB.
-
sin ( A ± B ) = sin A ⋅ cos B ± cos A ⋅ sin B \sin(A\pm B)=\sin A\cdot\cos B \pm \cos A\cdot\sin B sin(A±B)=sinA⋅cosB±cosA⋅sinB.
-
cos ( 2 A ) = cos 2 A − sin 2 A = 1 − 2 sin 2 A = 2 cos 2 A − 1 \cos(2A)=\cos^2A-\sin^2A=1-2\sin^2A=2\cos^2A-1 cos(2A)=cos2A−sin2A=1−2sin2A=2cos2A−1.
-
cos A = cos 2 A 2 − sin 2 A 2 = 1 − 2 sin 2 A 2 = 2 cos 2 A 2 − 1 \cos A = \cos^2\dfrac{A}{2}-\sin^2\dfrac{A}{2}=1-2\sin^2\dfrac{A}{2}=2\cos^2\dfrac{A}{2}-1 cosA=cos22A−sin22A=1−2sin22A=2cos22A−1.
-
sin ( 2 A ) = 2 sin A ⋅ cos A \sin(2A)=2\sin A\cdot\cos A sin(2A)=2sinA⋅cosA.
-
sin A = 2 sin A 2 ⋅ cos A 2 \sin A = 2\sin\dfrac{A}{2}\cdot\cos\dfrac{A}{2} sinA=2sin2A⋅cos2A.
-
tan 2 α = 2 tan α 1 − tan 2 α \tan2\alpha=\dfrac{2\tan\alpha}{1-\tan^2\alpha} tan2α=1−tan2α2tanα.
-
tan α = 2 tan α 2 1 − tan 2 α 2 \tan\alpha=\dfrac{2\tan\dfrac{\alpha}{2}}{1-\tan^2\dfrac{\alpha}{2}} tanα=1−tan22α2tan2α.
-
tan α 2 = 1 − cos α sin α = sin α 1 + cos α \tan\dfrac{\alpha}{2}=\dfrac{1-\cos\alpha}{\sin\alpha}=\dfrac{\sin\alpha}{1+\cos\alpha} tan2α=sinα1−cosα=1+cosαsinα.
tan 2 α = sin 2 α cos 2 α = 2 sin α ⋅ cos α 1 − 2 sin 2 α = 2 tan α 1 cos 2 α − 2 tan 2 α = 2 tan α 1 − sin 2 α cos 2 α − tan 2 α = 2 tan α 1 − tan 2 α . \tan2\alpha=\dfrac{\sin2\alpha}{\cos2\alpha}=\dfrac{2\sin\alpha\cdot\cos\alpha}{1-2\sin^2\alpha}=\dfrac{2\tan\alpha}{\dfrac{1}{\cos^2\alpha}-2\tan^2\alpha}=\dfrac{2\tan\alpha}{\dfrac{1-\sin^2\alpha}{\cos^2\alpha}-\tan^2\alpha}=\dfrac{2\tan\alpha}{1-\tan^2\alpha}. tan2α=cos2αsin2α=1−2sin2α2sinα⋅cosα=cos2α1−2tan2α2tanα=cos2α1−sin2α−tan2α2tanα=1−tan2α2tanα.
tan α = 2 tan α 2 1 − tan 2 α 2 \tan\alpha=\dfrac{2\tan\dfrac{\alpha}{2}}{1-\tan^2\dfrac{\alpha}{2}} tanα=1−tan22α2tan2α
tan α − tan α tan 2 α 2 = 2 tan α 2 \tan\alpha-\tan\alpha\tan^2\dfrac{\alpha}{2}=2\tan\dfrac{\alpha}{2} tanα−tanαtan22α=2tan2α
tan α ⋅ tan 2 α 2 + 2 tan α 2 − tan α = 0 \tan\alpha\cdot\tan^2\dfrac{\alpha}{2}+2\tan\dfrac{\alpha}{2}-\tan\alpha=0 tanα⋅tan22α+2tan2α−tanα=0
求根公式:
tan α 2 = − 2 ± 4 + 4 tan 2 α 2 tan α = − 1 ± sec α tan α = − cos α ± 1 sin α \tan\dfrac{\alpha}{2}=\dfrac{-2\pm\sqrt{4+4\tan^2\alpha}}{2\tan\alpha}=\dfrac{-1\pm\sec\alpha}{\tan\alpha}=\dfrac{-\cos\alpha\pm1}{\sin\alpha} tan2α=2tanα−2±4+4tan2α=tanα−1±secα=sinα−cosα±1
当 α ∈ ( 0 , π ) \alpha\in(0,\pi) α∈(0,π) 时, tan α 2 > 0 \tan\dfrac{\alpha}{2}>0 tan2α>0,而 − cos α + 1 sin α < 0 -\dfrac{\cos\alpha+1}{\sin\alpha}<0 −sinαcosα+1<0.
∴ tan α 2 = − cos α + 1 sin α \therefore \tan\dfrac{\alpha}{2}=-\dfrac{\cos\alpha+1}{\sin\alpha} ∴tan2α=−sinαcosα+1 不成立.
∴ tan α 2 = 1 − cos α sin α = ( 1 − cos α ) ⋅ ( 1 + cos α ) sin α + sin α ⋅ cos α = 1 − cos 2 α sin α + sin α ⋅ cos α = sin α 1 + cos α \therefore \tan\dfrac{\alpha}{2}=\dfrac{1-\cos\alpha}{\sin\alpha}=\dfrac{(1-\cos\alpha)\cdot(1+\cos\alpha)}{\sin\alpha+\sin\alpha\cdot\cos\alpha}=\dfrac{1-\cos^2\alpha}{\sin\alpha+\sin\alpha\cdot\cos\alpha}=\dfrac{\sin\alpha}{1+\cos\alpha} ∴tan2α=sinα1−cosα=sinα+sinα⋅cosα(1−cosα)⋅(1+cosα)=sinα+sinα⋅cosα1−cos2α=1+cosαsinα
正、余弦化切弦
-
sin 2 x = 2 sin x ⋅ cos x = 2 tan x sec 2 x = 2 tan x 1 + tan 2 x \sin2x=2\sin x\cdot\cos x=\dfrac{2\tan x}{\sec^2x}=\dfrac{2\tan x}{1+\tan^2x} sin2x=2sinx⋅cosx=sec2x2tanx=1+tan2x2tanx.
-
cos 2 x = cos 2 x − sin 2 x = 1 − tan 2 x sec 2 x = 1 − tan 2 x 1 + tan 2 x \cos2x=\cos^2x-\sin^2x=\dfrac{1-\tan^2x}{\sec^2x}=\dfrac{1-\tan^2x}{1+\tan^2x} cos2x=cos2x−sin2x=sec2x1−tan2x=1+tan2x1−tan2x.
-
sin x = 2 tan x 2 1 + tan 2 x 2 \sin x=\dfrac{2\tan\dfrac{x}{2}}{1+\tan^2\dfrac{x}{2}} sinx=1+tan22x2tan2x.
-
cos x = 1 − tan 2 x 2 1 + tan 2 x 2 \cos x=\dfrac{1-\tan^2\dfrac{x}{2}}{1+\tan^2\dfrac{x}{2}} cosx=1+tan22x1−tan22x.
辅助角公式
- sin α ⋅ a a 2 + b 2 − cos α ⋅ b a 2 + b 2 = sin α ⋅ cos β − cos α ⋅ sin β = sin ( α − β ) \sin\alpha\cdot\dfrac{a}{\sqrt{a^2+b^2}}-\cos\alpha\cdot\dfrac{b}{\sqrt{a^2+b^2}}=\sin\alpha\cdot\cos\beta-\cos\alpha\cdot\sin\beta=\sin(\alpha-\beta) sinα⋅a2+b2a−cosα⋅a2+b2b=sinα⋅cosβ−cosα⋅sinβ=sin(α−β).
其中,令 cos β = a a 2 + b 2 \cos\beta=\dfrac{a}{\sqrt{a^2+b^2}} cosβ=a2+b2a, sin β = b a 2 + b 2 \sin\beta=\dfrac{b}{\sqrt{a^2+b^2}} sinβ=a2+b2b,
则有 cos 2 β + sin 2 β = ( a a 2 + b 2 ) 2 + ( b a 2 + b 2 ) 2 = 1 \cos^2\beta+\sin^2\beta=\Big(\dfrac{a}{\sqrt{a^2+b^2}}\Big)^2+\Big(\dfrac{b}{\sqrt{a^2+b^2}}\Big)^2=1 cos2β+sin2β=(a2+b2a)2+(a2+b2b)2=1.
E m L 2 ω 2 + R 2 ⋅ ( R ⋅ sin ω t − L ω ⋅ cos ω t ) \dfrac{E_m}{L^2\omega^2+R^2}\cdot\big(R\cdot\sin\omega t-L\omega\cdot\cos\omega t\big) L2ω2+R2Em⋅(R⋅sinωt−Lω⋅cosωt)
= E m L 2 ω 2 + R 2 ⋅ ( sin ω t ⋅ R L 2 ω 2 + R 2 − cos ω t ⋅ L ω L 2 ω 2 + R 2 ) =\dfrac{E_m}{\sqrt{L^2\omega^2+R^2}}\cdot\big(\sin\omega t\cdot\dfrac{R}{\sqrt{L^2\omega^2+R^2}}-\cos\omega t\cdot\dfrac{L\omega}{\sqrt{L^2\omega^2+R^2}}\big) =L2ω2+R2Em⋅(sinωt⋅L2ω2+R2R−cosωt⋅L2ω2+R2Lω)
= E m L 2 ω 2 + R 2 ⋅ sin ( ω t − φ ) =\dfrac{E_m}{\sqrt{L^2\omega^2+R^2}}\cdot\sin(\omega t-\varphi) =L2ω2+R2Em⋅sin(ωt−φ).
其中 cos φ = R L 2 ω 2 + R 2 \cos\varphi=\dfrac{R}{\sqrt{L^2\omega^2+R^2}} cosφ=L2ω2+R2R, sin φ = L ω L 2 ω 2 + R 2 \sin\varphi=\dfrac{L\omega}{\sqrt{L^2\omega^2+R^2}} sinφ=L2ω2+R2Lω.
积化和差、和差化积
参考往期文章,点击跳转
相关文章:

常用的三角函数公式
sin 2 x cos 2 x 1 \sin ^2 x \cos ^2 x 1 sin2xcos2x1 tan x sin x cos x \tan x \dfrac{\sin x}{\cos x} tanxcosxsinx cot x 1 tan x cos x sin x \cot x \dfrac{1}{\tan x}\dfrac{\cos x}{\sin x} cotxtanx1sinxcosx sec …...
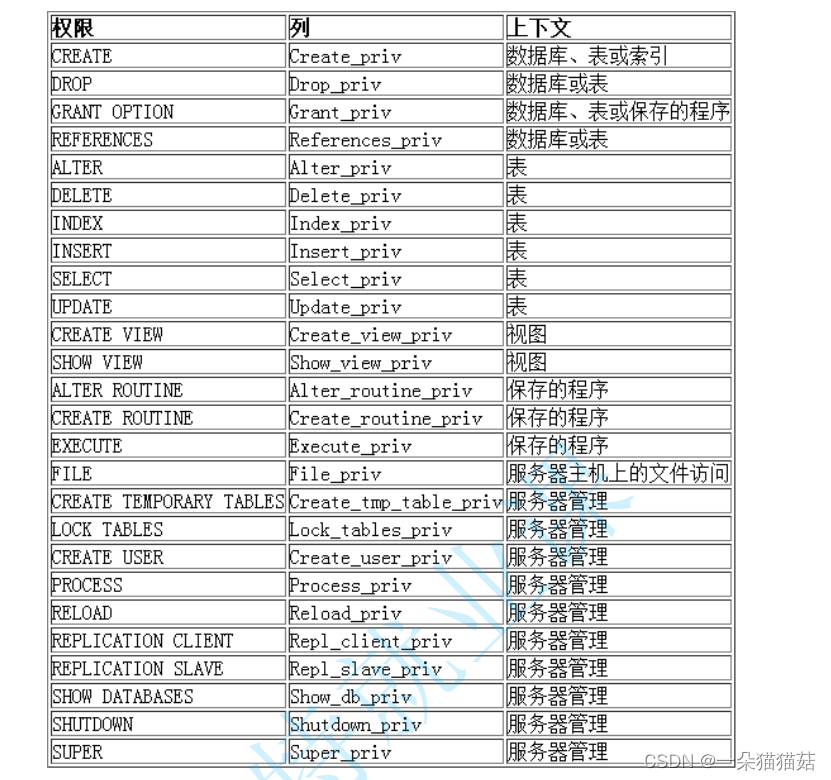
【MySQL】一文学会所有MySQL基础知识以及基本面试题
文章目录 前言 目录 文章目录 前言 一、主流数据库以及如何登陆数据库 二、常用命令使用 三、SQL分类 3.1 存储引擎 四、创建数据库如何设置编码等问题 4.1操纵数据库 4.2操纵表 五、数据类型 六、表的约束 七、基本查询 八、函数 九、复合查询 十、表的内连和外连 十一、索引…...
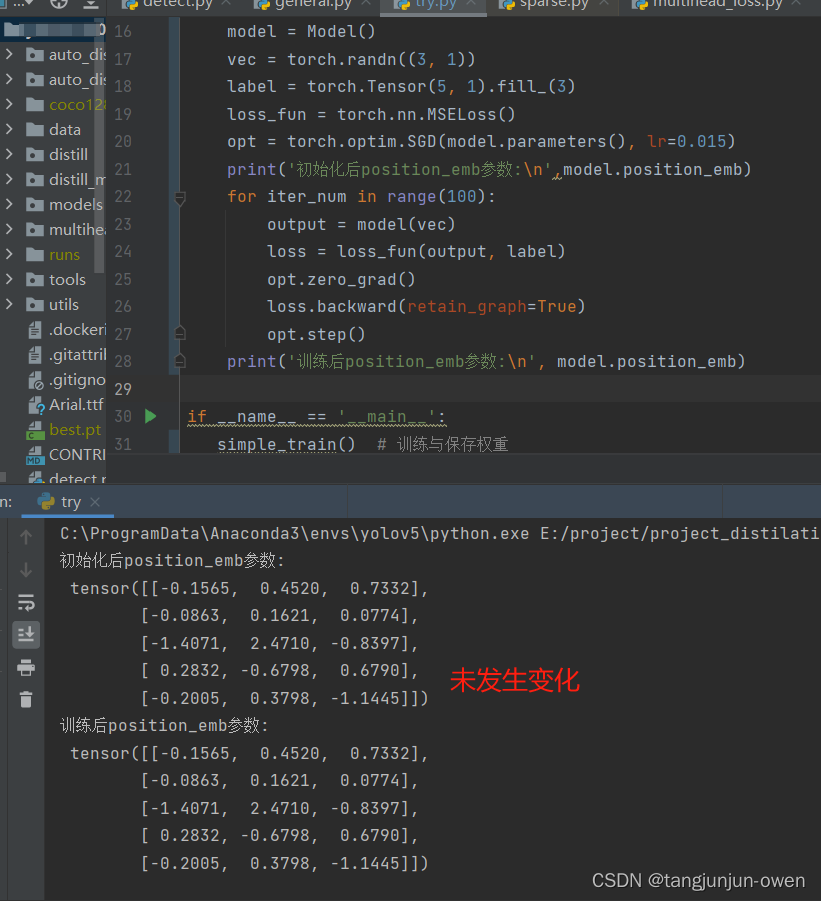
self.register_buffer方法使用解析(pytorch)
self.register_buffer就是pytorch框架用来保存不更新参数的方法。 列子如下: self.register_buffer("position_emb", torch.randn((5, 3)))第一个参数position_emb传入一个字符串,表示这组参数的名字,第二个就是tensor形式的参数…...
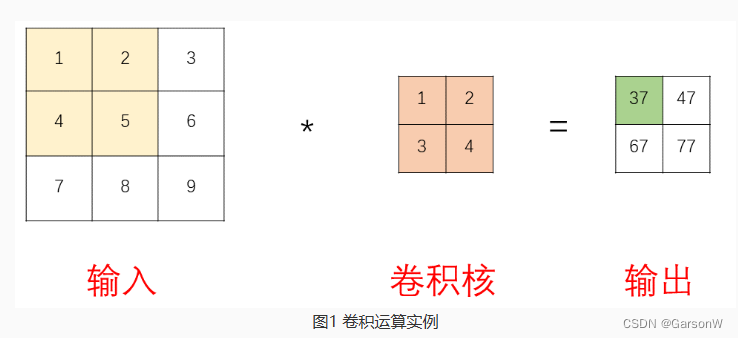
关于卷积神经网络中如何计算卷积核大小(kernels)
首先需要说明的一点是,虽然卷积层得名于卷积( convolution )运算,但我们通常在卷积层中使用更加直观的计算方式,叫做互相关( cross-correlation )运算。 也就是说,其实我们现在在这里…...

python使用selenium做自动化,最新版Chrome与chromedriver不兼容
目前Chrome版本是118.0.5993.118 下方是版本对应的下载地址: chrome版本118: https://download.csdn.net/download/qq_35845339/88510476 chrome版本119: chromedriverlinux64https://edgedl.me.gvt1.com/edgedl/chrome/chrome-for-testin…...
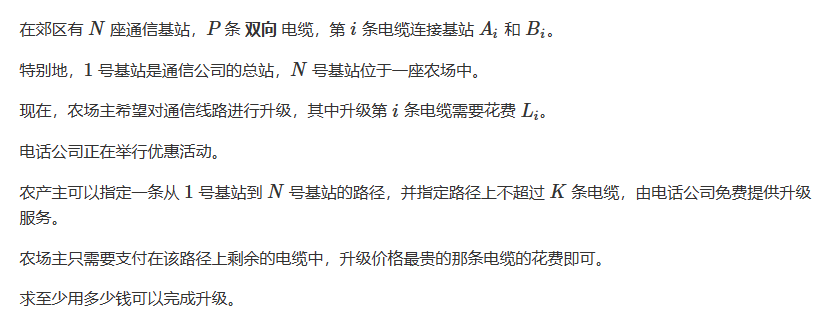
算法进阶指南图论 通信线路
通信线路 思路:我们考虑需要升级的那条电缆的花费,若其花费为 w ,那么从 1 到 n 的路径上,至多存在 k 条路径的价值大于 w ,这具有一定的单调性,当花费 w 越大,我们路径上价值大于 w 的花费会越…...
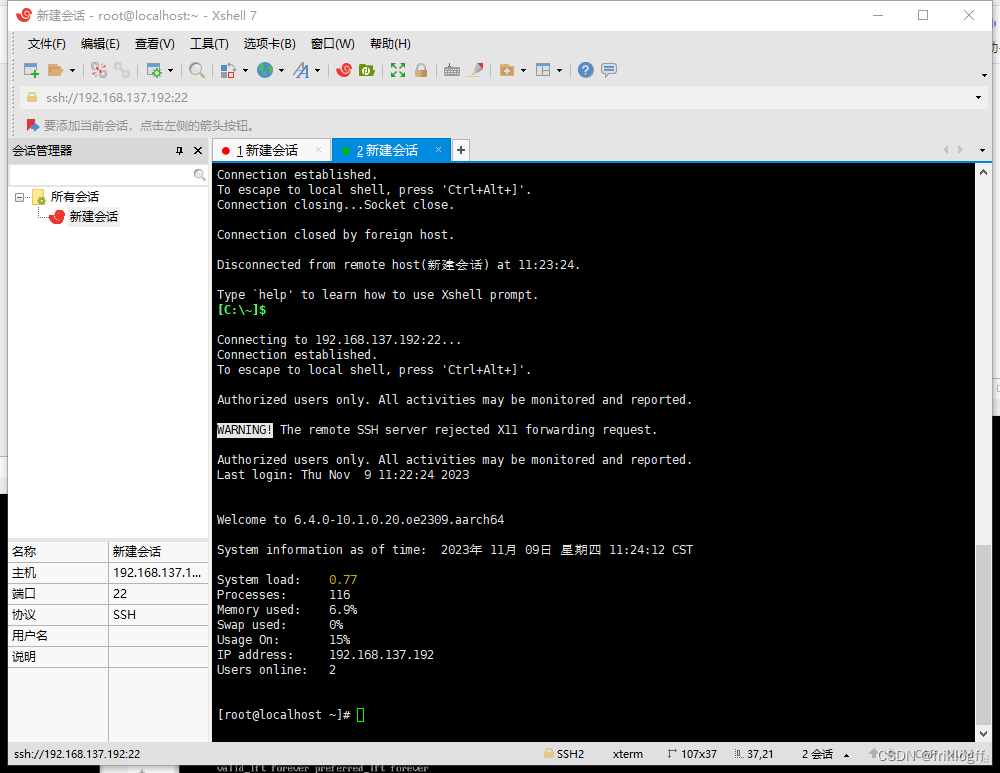
【QEMU-tap-windows-Xshell】QEMU 创建 aarch64虚拟机(附有QEMU免费资源)
“从零开始:在Windows上创建aarch64(ARM64)虚拟机” 前言 aarch64(ARM64)架构是一种现代的、基于 ARM 技术的计算架构,具有诸多优点,如低功耗、高性能和广泛应用等。为了在 Windows 平台上体验…...

strtok函数详解:字符串【分割】的利器
目录 一,strtok函数简介 二,strtok函数的用法 三,strtok函数的注意事项 一,strtok函数简介 strtok函数可以帮助我们将一个字符串按照指定的分隔符进行分割,从而得到我们想要的子字符串。 🍂函数头文件&am…...

winui3开发笔记(二)自定义标题栏
参考文章链接:https://www.programminghunter.com/article/46392310600/ 注意事项 获取 AppWindowTitleBar 的实例并设置其颜色属性时,InitializeTitleBar(AppWindow.TitleBar);,只适用于Windows App SDK 1.2及以上,所以如果用w…...

MapReduce 读写数据库
MapReduce 读写数据库 经常听到小伙伴吐槽 MapReduce 计算的结果无法直接写入数据库, 实际上 MapReduce 是有操作数据库实现的 本案例代码将实现 MapReduce 数据库读写操作和将数据表中数据复制到另外一张数据表中 准备数据表 create database htu; use htu; creat…...
)
设计模式 -- 状态模式(State Pattern)
状态模式:类的行为基于它的状态改变 属于行为型模式,创建表示各种状态的对象和一个行为随着状态对象改变而改变的 context 对象。在代码中包含大量与对象状态有关的条件语句可以通过此模式将各种具体的状态类抽象出来 介绍 意图:允许对象在…...

qt quick发布程序启动失败
qt quick/qml 程序发布之后,程序启动不了 经过探究测试,程序启动的不了的情况下是因为有dll没有添加。在release文件夹下进行发布操作(不单独复制xx.exe拿出来),再次点击IDE的RUN按钮,则会提示有Moudle没有…...

nginx反向代理报错合集
本文汇集了最近在使用nginx反向代理过程中遇到的一系列错误及其解决办法。 1缺乏支持项导致nginx配置错误 在利用sudo ./configure --with-http_ssl_module --with-http_stub_status_module进行配置时,往往会遇到以下类型的错误 error: the HTTP rewrite module …...
【Linux精讲系列】——vim详解
作者主页 📚lovewold少个r博客主页 ⚠️本文重点:c入门第一个程序和基本知识讲解 👉【C-C入门系列专栏】:博客文章专栏传送门 😄每日一言:宁静是一片强大而治愈的神奇海洋! 目录 目录 作者…...

微信小程序自动化采集方案
本文仅供学习交流,只提供关键思路不会给出完整代码,严禁用于非法用途,拒绝转载,若有侵权请联系我删除! 一、引言 1、对于一些破解难度大,花费时间长的目标,我们可以先采用自动化点击触发请求&…...

操作系统第三章王道习题_内存管理_总结易错知识点
1. 静态重定位和动态重定位 静态重定位(可重定位装入):作业在装入内存的时候,就修改它的物理地址. 静态重定位进程数据一旦确定位置,就不能再移动 动态重定位(动态运行时装入):作业装入内存的时候,不修改物理地址,直到运行的时候,根据重定位寄存器再修改地址. 对…...
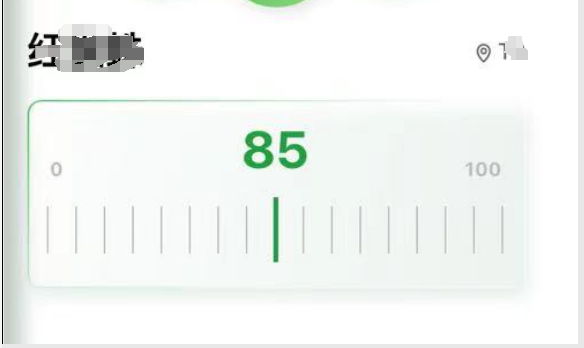
uniapp刻度尺的实现(swiper)滑动打分器
实现图(百分制):滑动swiper进行打分,分数加减 <view class"scoring"><view class"toggle"><view class"score"><text>{{0}}</text><view class"scoreId&quo…...
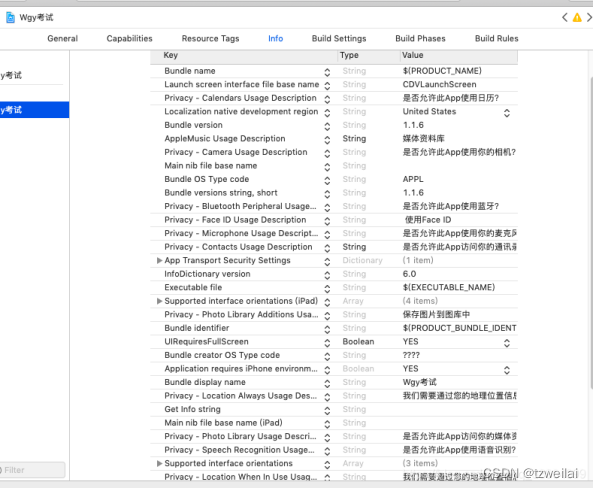
cordova Xcode打包ios以及发布流程(ionic3适用)
第一步 1、申请iOS证书 2、导入证书到钥匙串 第二步 1、xcode配置iOS证书 1.1用Xcode打开你的项目(我的Xcode版本是新版) 修改如下图 回到基本信息设置界面,Bundie 这项填写,最先创建的那个appid,跟创建iOS描述文件时选…...
,新旧版idea打开同一个项目会不会出现不兼容)
idea中的.idea文件夹以及*.iml文件(新版idea没有*.iml文件了),新旧版idea打开同一个项目会不会出现不兼容
一、背景 我们有可能会在同一台电脑上安装2个 intellj idea。比如一个community edition一个ultimate edition(一个安装板一个绿色解压版) 当然了,两个idea之间可能版本号也会有差。 这篇文章就来讨论两个问题,一是关于idea产生…...
高性能网络编程 - The C10K problem 以及 网络编程技术角度的解决思路
文章目录 C10KC10K的由来C10K问题在技术层面的典型体现C10K问题的本质C10K解决思路思路一:每个进程/线程处理一个连接思路二:每个进程/线程同时处理多个连接(IO多路复用)● 实现方式1:直接循环处理多个连接● 实现方式…...

PIDtoolbox终极指南:免费开源的黑盒日志分析神器,快速提升控制系统性能
PIDtoolbox终极指南:免费开源的黑盒日志分析神器,快速提升控制系统性能 【免费下载链接】PIDtoolbox PIDtoolbox is a set of graphical tools for analyzing blackbox log data 项目地址: https://gitcode.com/gh_mirrors/pi/PIDtoolbox 你是否曾…...

3步解决音乐歌词获取难题:163MusicLyrics歌词提取工具实战指南
3步解决音乐歌词获取难题:163MusicLyrics歌词提取工具实战指南 【免费下载链接】163MusicLyrics 云音乐歌词获取处理工具【网易云、QQ音乐】 项目地址: https://gitcode.com/GitHub_Trending/16/163MusicLyrics 还在为找不到心爱歌曲的歌词而烦恼吗ÿ…...

OpCore-Simplify:5分钟完成黑苹果OpenCore自动化配置终极指南
OpCore-Simplify:5分钟完成黑苹果OpenCore自动化配置终极指南 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify OpCore-Simplify是一款专为简…...

Realtek 8192FU无线网卡Linux驱动终极指南:让Linux系统轻松识别USB无线网卡
Realtek 8192FU无线网卡Linux驱动终极指南:让Linux系统轻松识别USB无线网卡 【免费下载链接】rtl8192fu Realtek 8192FU Linux USB无线网卡驱动 项目地址: https://gitcode.com/gh_mirrors/rt/rtl8192fu 你是否遇到过这样的尴尬:在Linux系统上插入…...

仅一条提示,23岁业余爱好者靠ChatGPT破解60年数学难题,陶哲轩:此前所有研究者第一步就集体走偏
整理 | 苏宓出品 | CSDN(ID:CSDNnews)一名没有受过系统数学训练的年轻人,借助 ChatGPT,推进了一个困扰数学界约 60 年的经典问题。这听起来像是一个夸张的 AI 宣传故事,但据《Scientific American》报道&am…...
构建企业级数字人交互系统:OpenAvatarChat技术架构深度解析
构建企业级数字人交互系统:OpenAvatarChat技术架构深度解析 【免费下载链接】OpenAvatarChat 项目地址: https://gitcode.com/gh_mirrors/op/OpenAvatarChat 在当前AI技术快速发展的背景下,如何构建一个稳定、高效且可扩展的数字人交互系统成为许…...

移动架构模式
移动架构模式:构建高效灵活的移动应用基石 在移动应用开发领域,架构模式是决定应用性能、可维护性和扩展性的核心要素。随着移动设备功能日益复杂,用户对流畅体验的要求不断提升,选择合适的架构模式成为开发团队的首要任务。从早…...

PCB后道制程高速收板方案:基于CD视觉与蜘蛛机械手的抓取系统
成品清洗、OSP、水平沉锡等后道制程对收板速度要求较高,人工收板效率难以匹配产线节拍。系统架构 坤鹏伯爵KPZU-902A蜘蛛手收板机采用CD视觉系统与并联蜘蛛机械手协同作业,双工位水平式载具交替收板。关键技术 1. CD视觉快速定位相机实时捕捉板件位置&am…...

Zotero文献库去重难题:如何用智能合并插件高效清理重复条目?
Zotero文献库去重难题:如何用智能合并插件高效清理重复条目? 【免费下载链接】ZoteroDuplicatesMerger A zotero plugin to automatically merge duplicate items 项目地址: https://gitcode.com/gh_mirrors/zo/ZoteroDuplicatesMerger 还在手动整…...

EKS监控和可观测性最佳实践:从日志聚合到性能指标监控的完整解决方案
EKS监控和可观测性最佳实践:从日志聚合到性能指标监控的完整解决方案 【免费下载链接】aws-eks-best-practices A best practices guide for day 2 operations, including operational excellence, security, reliability, performance efficiency, and cost optimi…...