Semantic-Guided Zero-Shot Learning for Low-Light ImageVideo Enhancement
论文阅读之无监督低光照图像增强 Semantic-Guided Zero-Shot Learning for Low-Light Image/Video Enhancement
代码: https://github.com/ShenZheng2000/SemantiGuided-Low-Light-Image-Enhancement
在低光条件下增加亮度的一个可行方法是使用更高的ISO或更长时间的曝光时间。然而,这些策略分别加剧了噪声和引入了运动模糊[2]。另一种合理的方法是使用Photoshop或Lightroom等现代软件进行光线调整。然而,这些软件需要艺术技能,并且对于不同光照条件的大规模数据集效率低下。
近年来,基于深度学习的低照度图像增强方法因其令人瞩目的高效性、准确性和鲁棒性而受到广泛关注。监督方法[33,48,52,45]在上得分最高。一些基准数据集[47,13,35,25]具有出色的图像到图像映射能力。然而,它们需要成对的训练图像(即低/正常光线对),这要么需要昂贵的润饰,要么要求不可实现的具有相同场景但不同照明条件的图像捕捉。另一方面,无监督方法[20]只需要一个未配对的数据集进行训练。尽管如此,人工选择的数据集的数据偏差限制了他们的泛化能力。零样本学习[11,27]方法消除了对成对图像和未配对数据集的需要。然而,它们忽略了语义信息,[37,10,31]表明这对高级视觉任务至关重要。因此,他们增强的图像在次优视觉质量。图1揭示了在以往研究中的局限性.
针对上述局限性,我们提出了语义指导的低照度图像增强零元框架(图 2)。由于我们专注于低照度图像/视频增强,我们首先设计了一个轻量级增强因子提取(EFE)网络,该网络具有深度可分离卷积[15]和对称跳转连接。可分离卷积[15]和对称跳转连接设计轻量级增强因子提取(EFE)网络。EFE 具有很强的自适应能力,可以利用低照度图像的空间信息来增强图像/视频效果。为了以可承受的模型大小执行图像增强,我们随后引入了递归图像增强(RIE)网络。
图像增强(RIE)网络 能够逐步增强图像,将前一阶段的输出作为后一递归阶段的输入。为了在增强过程中保留语义信息,我们最后
最后,我们提出了一种无监督语义分割(USS)网络,无需昂贵的分割注释。该网络USS 接收来自 RIE 的增强图像,并利用
特征金字塔网络 [29] 来计算分割损失。分割损失与其他非参考损失函数合并为总损失,并在训练过程中更新 EFE 的参数。建议工作的贡献总结如下:
- 我们提出了一种新的以语义为指导的零元低照度图像增强网络。据我们所知,我们是第一个将高层次语义信息与低照度图像增强网络相融合的框架。
- 我们开发了一个轻量级的卷积神经网络来自动提取增强因子,它记录了低照度图像像素级的光照不足。
- 设计了一种循环图像增强策略,其中包含五个非参考损失函数,以提高模型对不同光照条件图像的泛化能力。
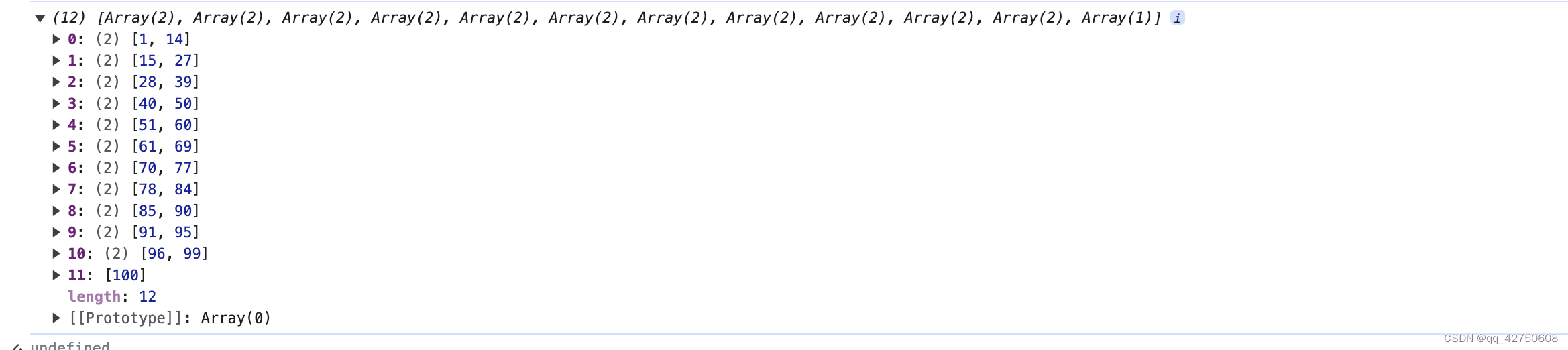
- 进行了广泛的实验,证明了模型在定性和定量指标上的优越性。我们的模型是低光视频增强的理想选择,因为它可以在单GPU上1秒内处理1000张大小1200 × 900的图像
3.1. Enhancement Factor Extraction Network
增强因子提取(EFE)旨在学习低照度图像的像素级光不足,记录该信息在增强因子中。受启发受U-Net[42]架构的启发,EFE是一个具有对称跳过连接的全卷积神经网络,这意味着它可以处理任意大小的输入图像。没有采用批量归一化或上/下采样,因为它们会破坏增强图像的空间连贯性[43,21,18]。EFE中的每个卷积块由一个3 × 3深度可分离卷积层和随后的ReLU[38]激活层组成。最后一个卷积块将通道数量从32减少到3,并通过Tanh激活输出增强因子xr。图3将从2幅低照度图像中提取的增强因子可视化。可见,低照度图像中较亮的区域对应较低的增强因子值,反之亦然。
3.2. Recurrent Image Enhancement Network
受递归[41,55,28]和光增强曲线[50,11]在低照度图像增强中的成功启发,我们构建了一个递归图像增强(RIE)网络,根据增强因子对低照度图像进行增强,然后输出增强后的图像。每个递归都将前一阶段的输出和增强因子作为其输入。循环增强的过程如下:
其中x为输出,xr为增强因子,t为递归步长。下一步是决定照亮图像的最佳顺序。由于循环网络应该是简单的微分,并且应该是有效的对于渐进减轻,我们只考虑正整数的顺序。考虑到这一点,我们在图中绘制关于不同xr和顺序的递归图像增强。4. 阶数为1时,像素值对xr不敏感,与上一阶段相同。当Order等于3或4时,像素值接近甚至超过1.0,使图像看起来太亮。相比之下,2的顺序赋予最鲁棒的递归增强。
3.3. Unsupervised Semantic Segmentation Network
无监督语义分割(USS)网络旨在对增强后的图像进行精确的像素分割,在渐进图像增强的过程中保持语义信息。与[7,32,46,12]类似,我们在训练期间冻结分割网络的所有层。在这里,我们使用两个路径,包括bottom- bottom路径,它使用ResNet-50[14]与ImageNet[5]权重,以及top-down路径,它使用高斯初始化,均值为0,标准差为0.01。两条通路都有四个卷积块,它们通过横向连接相互连接。权重初始化的选择将在消融研究中解释。
来自RIE的增强图像将首先进入自下而上的路径进行特征提取。然后,自上而下的路径将高语义层转换为高分辨率层,以进行空间感知的语义分割。自顶向下方法中的每个卷积块对图像执行双线性上采样,并将其与横向结果连接。为了更好的感知质量,在拼接后应用了两个平滑的3×3卷积层。最后,我们将中每个块的结果连接起来并计算分割。
3.4. Loss Functions
采用5种无参考损失函数,包括Lspa、Lrgb、Lbri、Ltv和Lsem。我们没有考虑由于配对训练图像不可用而造成的内容损失或感知损失[35]。
**空间一致性损失**这种空间一致性损失通过在增强过程中保留相邻像素的差异,有助于保持低照度图像和增强图像之间的空间一致性。与[11,27]只考虑相邻单元不同,我们还包括与非相邻单元的空间一致性(见图5)。空间一致性损失为:
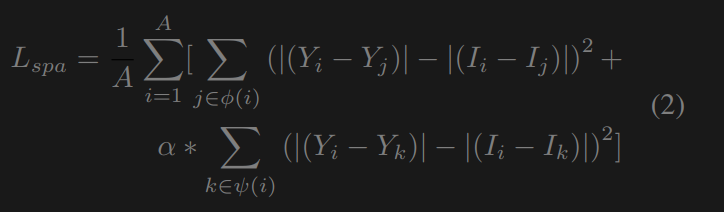
其中,Y和I分别是增强图像和低照度图像中a × a局部区域的平均像素值。A为局部区域的一侧,根据消融研究,我们将设为4。ψ(i)是四个相邻的邻域值(top, down, left, right), ψ(i)是四个不相邻的邻域值(top left, top right, lower left, lower right)。α值为0.5是因为非相邻邻居的权重不那么重要。
RGB 损失 色彩损失[45, 52, 11]通过桥接不同的色彩通道来减少增强图像中的色彩不正确性。我们采用的是 Charbonnier 损失,它有助于高质量图像重建[23, 19]。RGB 损失为
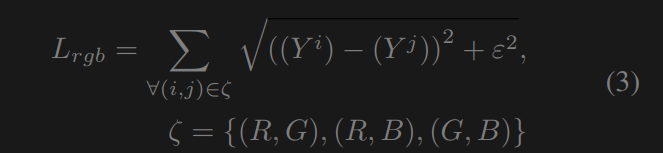
其中,ε是一个惩罚项,根据经验将其设置为10−6,以提高训练稳定性。
亮度损失 受[34,45,11]的启发,我们设计了亮度损失来限制图像中的曝光不足/过度。损失衡量的是两者之间的L1差特定区域到预定义曝光水平e的平均像素值,亮度损失为

其中E是理想的图像曝光等级,设置为0。消融研究显示60。总变差损失总变差损失[3]测量图像中相邻像素之间的差异。我们在这里使用全变差损失来减少噪声并增加图像的平滑性。与之前的低照度图像增强工作[48,52,45,11]不同,我们在损失中额外考虑通道间(R, G和B)关系以改善颜色亮度。我们的总变差损失为:
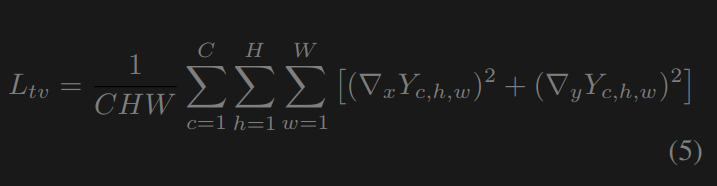
其中C、H、W分别表示图像的通道、高度、宽度。∇x和∇y分别是水平和垂直的梯度运算。语义损失语义损失有助于在增强过程中保持图像的语义信息。我们参考焦点损失[30]来编写我们的成本函数。消融研究推荐的语义损失不需要分割标签,只需要一个预先初始化的模型。语义损失为:

其中,p为分割网络对一个像素的估计类概率。受[7]的启发,我们选择焦点系数β和γ分别为1和2。
代码
需要两个网络成分,一个是递归网络络,一个是分割网络(不需要优化)

class enhance_net_nopool(nn.Module):def __init__(self, scale_factor, conv_type='dsc'):super(enhance_net_nopool, self).__init__()self.relu = nn.ReLU(inplace=True)self.scale_factor = scale_factorself.upsample = nn.UpsamplingBilinear2d(scale_factor=self.scale_factor)number_f = 32# Define Conv typeif conv_type == 'dsc':self.conv = DSCelif conv_type == 'dc':self.conv = DCelif conv_type == 'tc':self.conv = TCelse:print("conv type is not available")# zerodce DWC + p-sharedself.e_conv1 = self.conv(3, number_f)self.e_conv2 = self.conv(number_f, number_f)self.e_conv3 = self.conv(number_f, number_f)self.e_conv4 = self.conv(number_f, number_f)self.e_conv5 = self.conv(number_f * 2, number_f)self.e_conv6 = self.conv(number_f * 2, number_f)self.e_conv7 = self.conv(number_f * 2, 3)def enhance(self, x, x_r):x = x + x_r * (torch.pow(x, 2) - x)x = x + x_r * (torch.pow(x, 2) - x)x = x + x_r * (torch.pow(x, 2) - x)enhance_image_1 = x + x_r * (torch.pow(x, 2) - x)x = enhance_image_1 + x_r * (torch.pow(enhance_image_1, 2) - enhance_image_1)x = x + x_r * (torch.pow(x, 2) - x)x = x + x_r * (torch.pow(x, 2) - x)enhance_image = x + x_r * (torch.pow(x, 2) - x)return enhance_imagedef forward(self, x):if self.scale_factor == 1:x_down = xelse:x_down = F.interpolate(x, scale_factor=1 / self.scale_factor, mode='bilinear')# extractionx1 = self.relu(self.e_conv1(x_down))x2 = self.relu(self.e_conv2(x1))x3 = self.relu(self.e_conv3(x2))x4 = self.relu(self.e_conv4(x3))x5 = self.relu(self.e_conv5(torch.cat([x3, x4], 1)))x6 = self.relu(self.e_conv6(torch.cat([x2, x5], 1)))x_r = F.tanh(self.e_conv7(torch.cat([x1, x6], 1)))#稠密链接提取图像的特征(放大系数)if self.scale_factor == 1:x_r = x_relse:x_r = self.upsample(x_r)#保证x_r 的大小和图像的大小一致# enhancement#zero-dce 的网络结构不同的是x_r是变化的,而本文的x_r得到以后就不会变化了(只是在 self.enhance中)enhance_image = self.enhance(x, x_r)return enhance_image, x_r
对比zero-dce网络的结构
"""
Model File
"""from mindspore import nn
from mindspore import ops
from mindspore.common.initializer import Normalclass ZeroDCE(nn.Cell):"""Main Zero DCE Model"""def __init__(self, *, sigma=0.02, mean=0.0):super().__init__()self.relu = nn.ReLU()number_f = 32self.e_conv1 = nn.Conv2d(3, number_f, 3, 1, pad_mode='pad', padding=1, has_bias=True,weight_init=Normal(sigma, mean))self.e_conv2 = nn.Conv2d(number_f, number_f, 3, 1, pad_mode='pad', padding=1, has_bias=True,weight_init=Normal(sigma, mean))self.e_conv3 = nn.Conv2d(number_f, number_f, 3, 1, pad_mode='pad', padding=1, has_bias=True,weight_init=Normal(sigma, mean))self.e_conv4 = nn.Conv2d(number_f, number_f, 3, 1, pad_mode='pad', padding=1, has_bias=True,weight_init=Normal(sigma, mean))self.e_conv5 = nn.Conv2d(number_f * 2, number_f, 3, 1, pad_mode='pad', padding=1,has_bias=True, weight_init=Normal(sigma, mean))self.e_conv6 = nn.Conv2d(number_f * 2, number_f, 3, 1, pad_mode='pad', padding=1,has_bias=True, weight_init=Normal(sigma, mean))self.e_conv7 = nn.Conv2d(number_f * 2, 24, 3, 1, pad_mode='pad', padding=1, has_bias=True,weight_init=Normal(sigma, mean))self.split = ops.Split(axis=1, output_num=8)self.cat = ops.Concat(axis=1)def construct(self, x):"""ZeroDCE inference"""x1 = self.relu(self.e_conv1(x))x2 = self.relu(self.e_conv2(x1))x3 = self.relu(self.e_conv3(x2))x4 = self.relu(self.e_conv4(x3))x5 = self.relu(self.e_conv5(self.cat([x3, x4])))x6 = self.relu(self.e_conv6(self.cat([x2, x5])))x_r = ops.tanh(self.e_conv7(self.cat([x1, x6])))r1, r2, r3, r4, r5, r6, r7, r8 = self.split(x_r)x = x + r1 * (ops.pows(x, 2) - x)x = x + r2 * (ops.pows(x, 2) - x)x = x + r3 * (ops.pows(x, 2) - x)enhance_image_1 = x + r4 * (ops.pows(x, 2) - x)x = enhance_image_1 + r5 * (ops.pows(enhance_image_1, 2) - enhance_image_1)x = x + r6 * (ops.pows(x, 2) - x)x = x + r7 * (ops.pows(x, 2) - x)enhance_image = x + r8 * (ops.pows(x, 2) - x)r = self.cat([r1, r2, r3, r4, r5, r6, r7, r8])return enhance_image, r语义分割网络
#这里的calss 文中默认参数为21
class fpn(nn.Module):def __init__(self, numClass):super(fpn, self).__init__()# Res netself.resnet = resnet50(True)# fpn moduleself.fpn = fpn_module(numClass)#详细的代码看作者公开的代码# init fpnfor m in self.fpn.children():nn.init.normal_(m.weight, mean=0, std=0.01)nn.init.constant_(m.bias, 0)def forward(self, x):# Top-downc2, c3, c4, c5 = self.resnet.forward(x)#特征来自于预训练模型的不同尺度特征return self.fpn.forward(c2, c3, c4, c5)#输出是一个二维的张量为28个通道类别的概率
网络的训练:
def train(self):self.net.train()for epoch in range(self.num_epochs):for iteration, img_lowlight in enumerate(self.train_loader):img_lowlight = img_lowlight.to(device)enhanced_image, A = self.net(img_lowlight)#需要学习的网络loss = self.get_loss(A, enhanced_image, img_lowlight, self.E)#需要优化的损失self.optimizer.zero_grad()loss.backward()torch.nn.utils.clip_grad_norm(self.net.parameters(), self.grad_clip_norm)self.optimizer.step()if ((iteration + 1) % self.display_iter) == 0:print("Loss at iteration", iteration + 1, ":", loss.item())if ((iteration + 1) % self.snapshot_iter) == 0:torch.save(self.net.state_dict(), self.snapshots_folder + "Epoch" + str(epoch) + '.pth')
def get_loss(self, A, enhanced_image, img_lowlight, E):Loss_TV = 1600 * self.L_TV(A)loss_spa = torch.mean(self.L_spa(enhanced_image, img_lowlight))loss_col = 5 * torch.mean(self.L_color(enhanced_image))loss_exp = 10 * torch.mean(self.L_exp(enhanced_image, E))loss_seg = self.get_seg_loss(enhanced_image)loss = Loss_TV + loss_spa + loss_col + loss_exp + 0.1 * loss_segreturn loss
本文主要提出的损失函数
def get_NoGT_target(inputs):sfmx_inputs = F.log_softmax(inputs, dim=1)#按照行或者列来做归一化的,再做多一次log运算target = torch.argmax(sfmx_inputs, dim=1)#将输入input张量,无论有几维,首先将其reshape排列成一个一维向量,然后找出这个一维向量里面最大值的索引return targetdef get_seg_loss(self, enhanced_image):# segment the enhanced imageseg_input = enhanced_image.to(device)seg_output = self.seg(seg_input).to(device)# build seg outputtarget = (get_NoGT_target(seg_output)).data.to(device)# calculate seg. lossseg_loss = self.seg_criterion(seg_output, target)return seg_loss
self.seg_criterion = FocalLoss(gamma=2).to(device)
class FocalLoss(nn.Module):# def __init__(self, device, gamma=0, eps=1e-7, size_average=True):def __init__(self, gamma=0, eps=1e-7, size_average=True, reduce=True):super(FocalLoss, self).__init__()self.gamma = gammaself.eps = epsself.size_average = size_averageself.reduce = reduce# self.device = devicedef forward(self, input, target):# y = one_hot(target, input.size(1), self.device)y = one_hot(target, input.size(1))probs = F.softmax(input, dim=1)probs = (probs * y).sum(1) # dimension ???probs = probs.clamp(self.eps, 1. - self.eps)log_p = probs.log()# print('probs size= {}'.format(probs.size()))# print(probs)batch_loss = -(torch.pow((1 - probs), self.gamma)) * log_p# print('-----bacth_loss------')# print(batch_loss)if self.reduce:if self.size_average:loss = batch_loss.mean()else:loss = batch_loss.sum()else:loss = batch_lossreturn loss
公布的实验结果
if self.reduce:if self.size_average:loss = batch_loss.mean()else:loss = batch_loss.sum()else:loss = batch_lossreturn loss
公布的实验结果[外链图片转存中...(img-34Z4SH7g-1699538813410)]相关文章:
Semantic-Guided Zero-Shot Learning for Low-Light ImageVideo Enhancement
论文阅读之无监督低光照图像增强 Semantic-Guided Zero-Shot Learning for Low-Light Image/Video Enhancement 代码: https://github.com/ShenZheng2000/SemantiGuided-Low-Light-Image-Enhancement 在低光条件下增加亮度的一个可行方法是使用更高的ISO或更长时间…...

分享Python的十大库,这你一定得知道!
文章目录 前言关于Python技术储备一、Python所有方向的学习路线二、Python基础学习视频三、精品Python学习书籍四、Python工具包项目源码合集①Python工具包②Python实战案例③Python小游戏源码五、面试资料六、Python兼职渠道 前言 Python为我们提供了非常完善的基础库&#…...

react: hooks
useState useState的作用是是变量具有响应式,改变值页面可以同步变化 import { useState, useEffect } from "react";// 当前状态和一个让你更新它的函数 ; 参数为状态初始值 const [initLoading, setInitLoading] useState(true);// 任意地…...
Flink(二)【Flink 部署模式】
前言 今天是Flink学习的第二天,我的心情异常的复杂哈哈哈(苦笑),学习上还是比较顺利的,感情上我并不擅长,所以心情波动大在所难免。害,至少还有学习让我不被各种糟糕琐碎的日常生活里的人和事所…...

在使用ubuntu18.04的时候使用阿里源或者清华源后安装mysql5.7时出现dpkg提示的错误信息
在使用ubuntu18.04的时候使用阿里源或者清华源后安装mysql5.7时出现dpkg提示的错误信息 经过排查发现该问题可能跟本地库依赖文件导致mysql安装不上。 清除刚下载保留的mysql,然后删除、清除在更新本地依赖库。 sudo apt purge mysql* sudo apt autoremove sudo …...
和指针的区别)
引用(类名后加符号)和指针的区别
它们的区别: ①从现象上看, 指针在运行时可以改变其所指向的值, 而引用一旦和某个对象绑定后就不再改变。 这句话可以理解为: 指针可以被重新赋值以指向另一个不同的对象。 但是引用则总是指向在初始化时被指定的对象&#x…...

如何查看网站的https的数字证书
如题 打开Chrome浏览器,之后输入想要抓取https证书的网址,此处以知乎为例点击浏览器地址栏左侧的锁的按钮,如下图 点击“连接是安全的”选项,如下图 点击“证书有效”选项卡,如下图 查看基本信息和详细信息 点击详细信…...
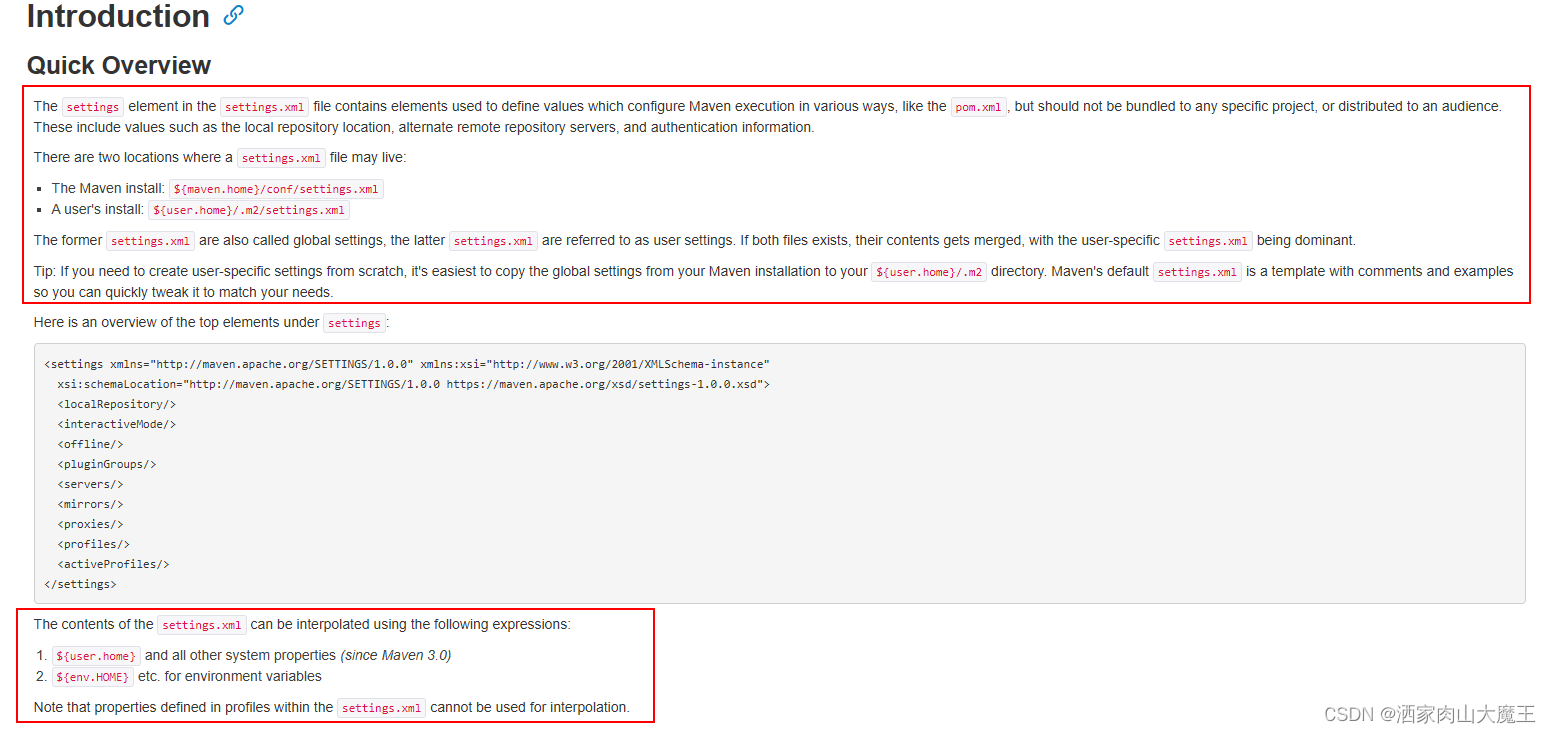
关于maven读取settings.xml文件的优先级问题
今天在IDEA中配置maven的setting.xml文件路径指向的.m2路径下的setting_a.xml文件,同时,我的maven3.6.3也放在.m2中。 [1] .m2文件夹 [2] apache-maven-3.6.3文件夹 然后,在IDEA中打包发布时发现,无论如何都读取不到指定的setti…...
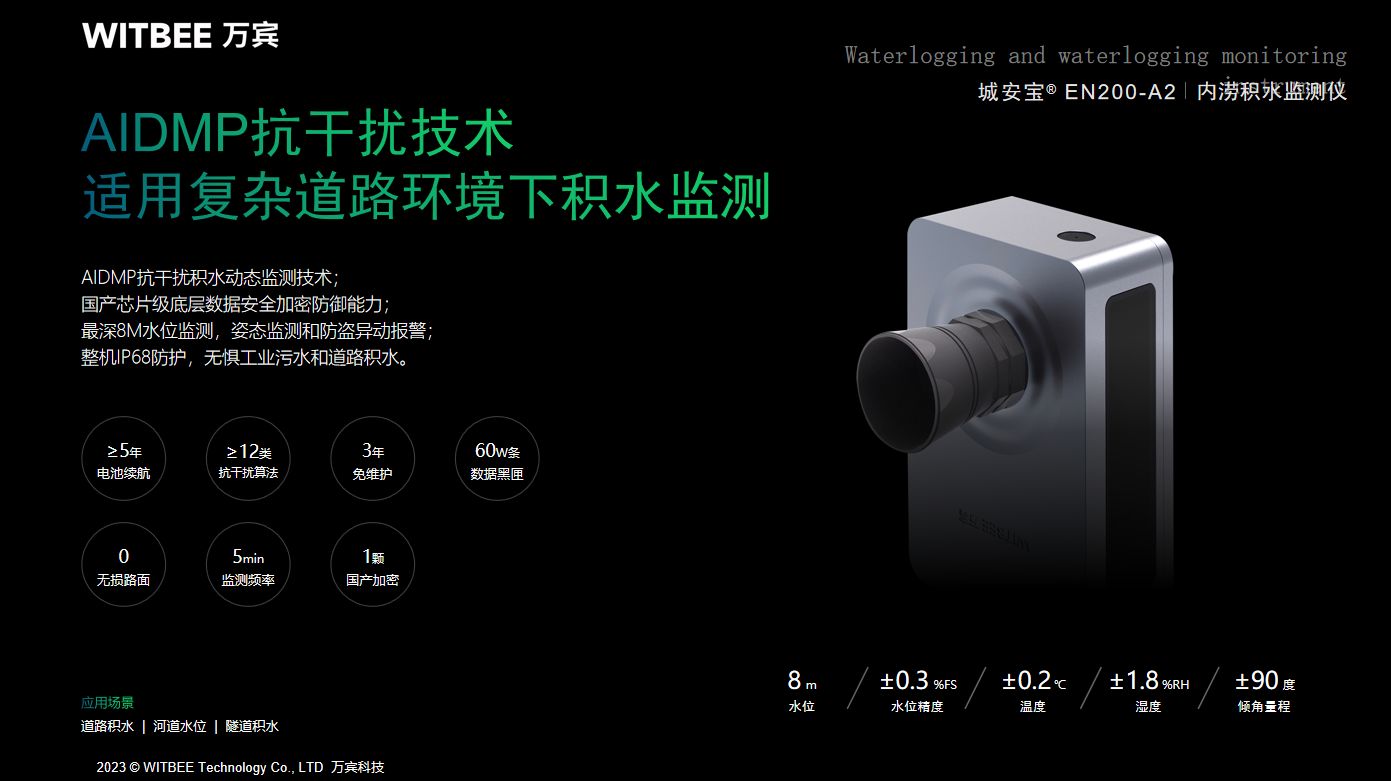
城市内涝积水监测,万宾科技内涝预警监测系统
每一个城市的排水体系都是一个复杂的网络系统,需要多个部分配合协调,预防城市排水管网带来安全隐患,也因此才能在一定程度上缓解城市内涝带来的安全问题。在海绵城市建设过程中不仅要解决大部分道路硬化导致的积水无法渗透等问题,…...
JavaEE初阶学习:Linux 基本使用和 web 程序部署
1.Linux的基本认识 Linux 是一个操作系统.(搞管理的系统) 和Windows都是同类产品~~ Linux 实际的场景: 1.服务器 2.嵌入式设备 3.移动端(手机)Android 其实就是Linux 1991年,还在读大学的 芬兰人 Linus Benedict Torvalds,搞了一个Linux 这样的系统0.01版,正式发布了~ 后…...
摔杯算法(要求用最少的测试次数找出恰巧会使杯子破碎的楼层。)
题目: 一种杯子,若在第N层被摔破,则在任何比N高的楼层均会破;若在第M层不破,则在任何比M低的楼层均不会破。给你两个这样的杯子,让你在100层高的楼层中测试,要求用最少的测试次数找出恰巧会使杯子破碎的楼层…...
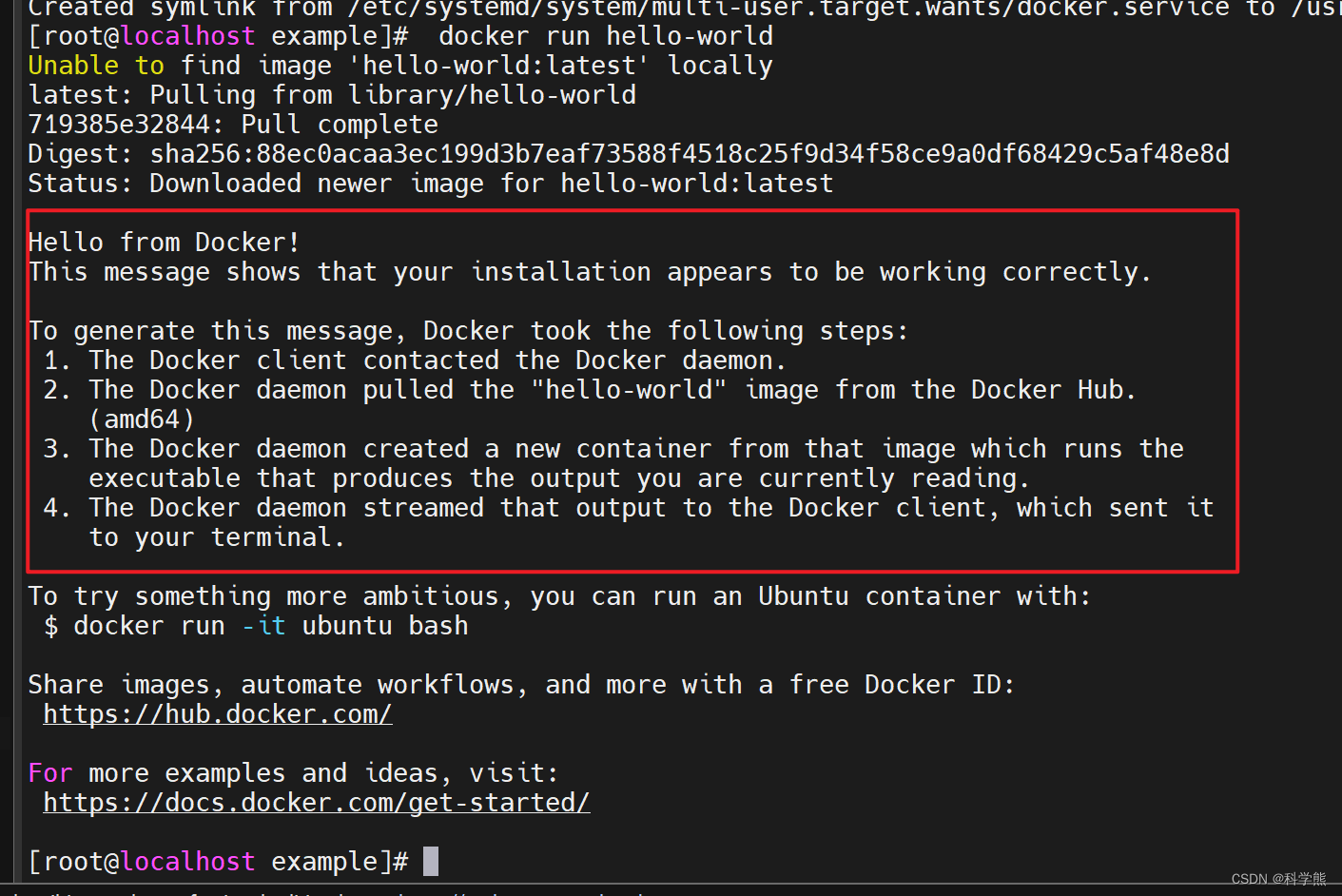
centos7安装docker容器
卸载老版本: $ sudo yum remove docker \docker-client \docker-client-latest \docker-common \docker-latest \docker-latest-logrotate \docker-logrotate \docker-engine/var/lib/docker/路径下存在镜像、数据卷、容器等,在卸载的时候是不会自动删除…...
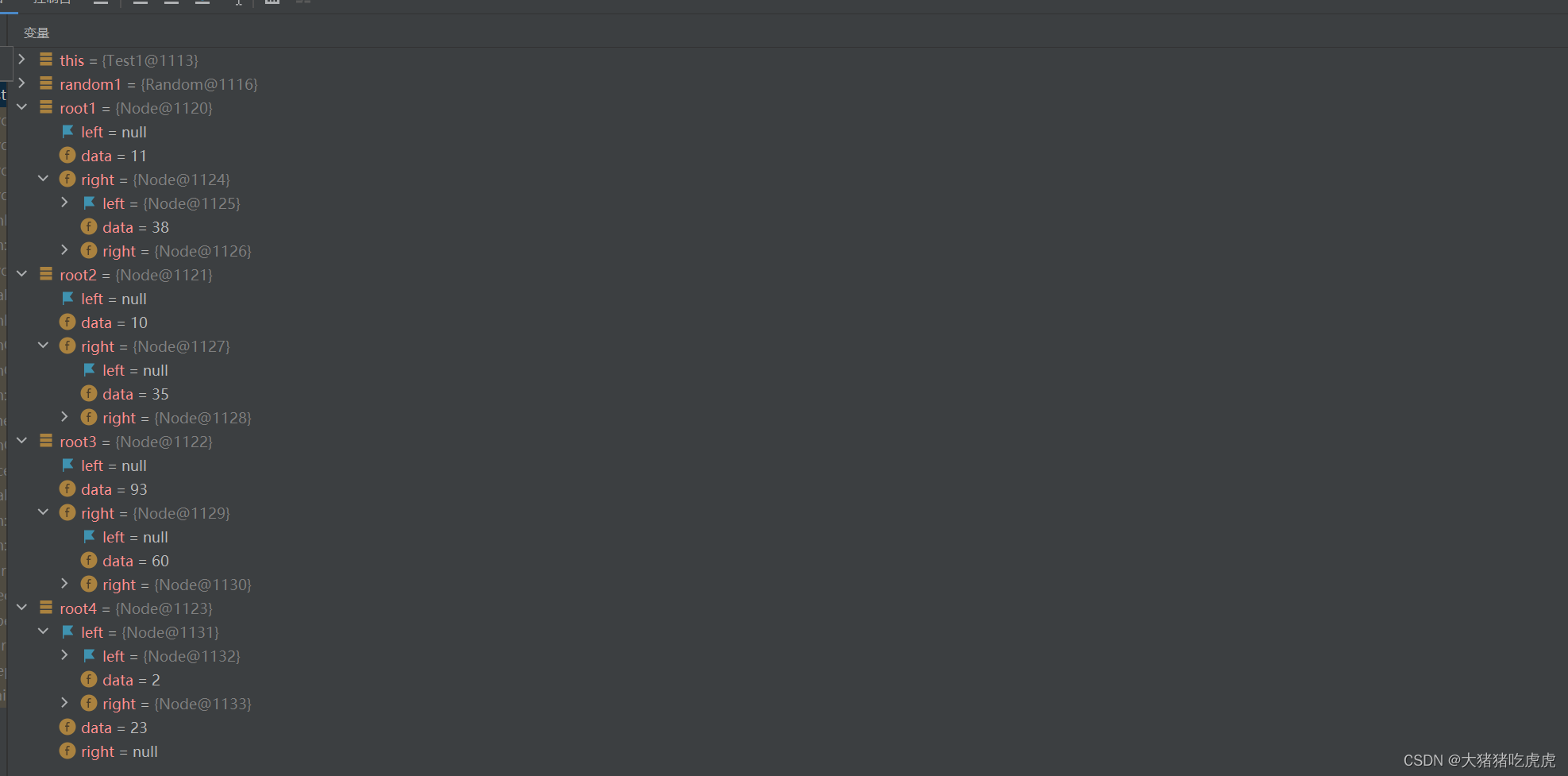
【二叉树】如何构建一个包含大量随机数节点的二叉树测试用例
【二叉树】如何构建一个包含大量随机数节点的二叉树测试用例 前言一、案例准备二、自动生成随机二叉树工具类(TreegenerateUtils)三、如何调用随机二叉树工具类(TreegenerateUtils)? 前言 今天笔者在测试有关二叉树的…...
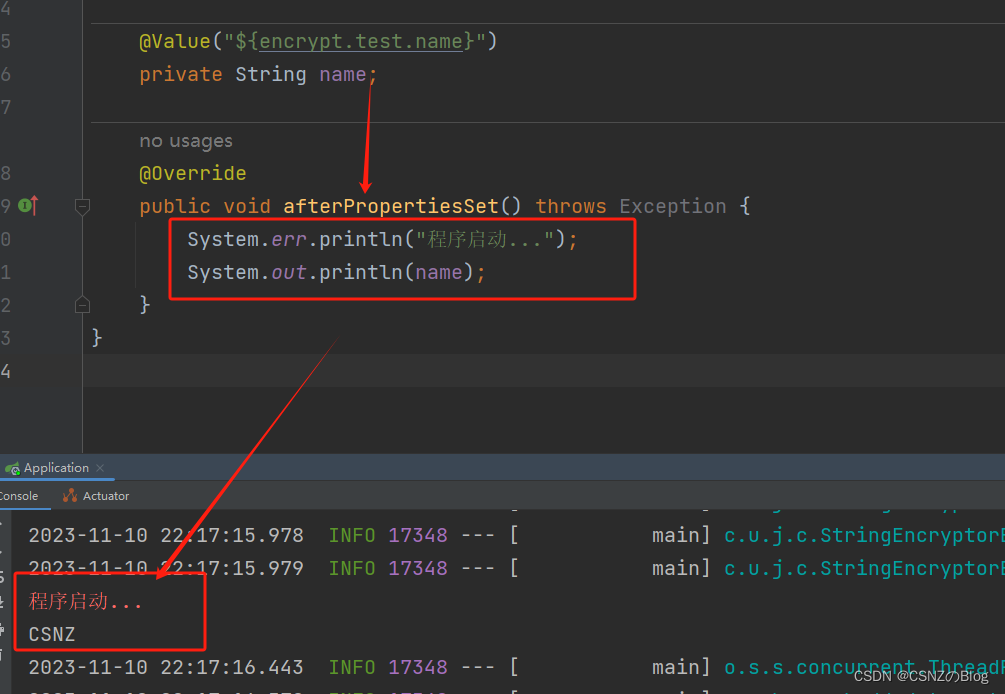
防火防盗防小人 使用 Jasypt 库来加密配置文件
⚔️ 项目配置信息存放在哪? 在日常开发工作中,我们经常需要使用到各种敏感配置,如数据库密码、各厂商的 SecretId、SecretKey 等敏感信息。 通常情况下,我们会将这些敏感信息明文放到配置文件中,或者放到配置中心中。…...
Spring Cloud学习(二)【Eureka注册中心】
文章目录 Eureka 注册中心Eureka 的作用 动手实践搭建 EurekaServer服务注册服务发现 Ribbon 负载均衡负载均衡原理IRule 接口(负载均衡策略)饥饿加载 Eureka 注册中心 服务调用出现的问题 不能采用硬编码服务消费者该如何获取服务提供者的地址信息&am…...
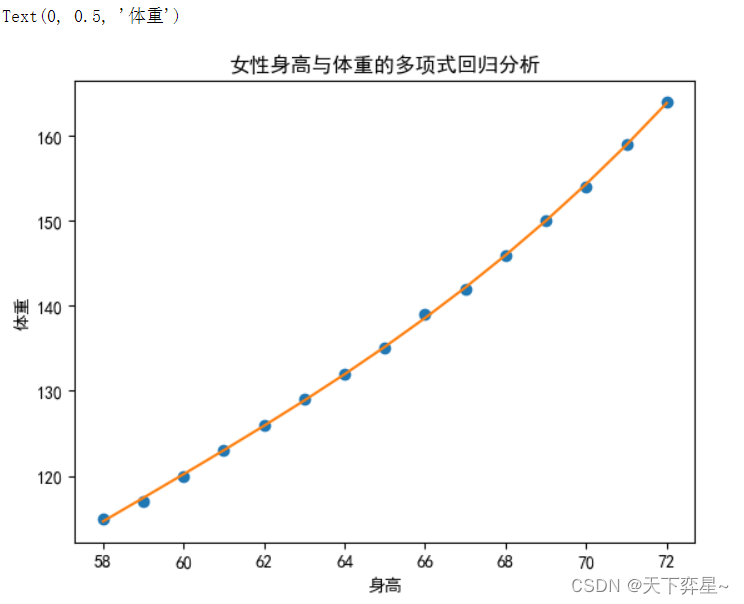
数据分析实战 | 线性回归——女性身高与体重数据分析
目录 一、数据集及分析对象 二、目的及分析任务 三、方法及工具 四、数据读入 五、数据理解 六、数据准备 七、模型训练 八、模型评价 九、模型调参 十、模型预测 实现回归分析类算法的Python第三方工具包比较常用的有statsmodels、statistics、scikit-learn等&#…...

python回文日期 并输出下一个ABABBABA型回文日期
题目: 输入: 输入包含一个八位整数N,表示日期 对于所有的测评用例,10000101 ≤N≤89991231,保证N是一个合法日期的8位数表示 输出: 输出两行,每行一个八位数。第一行表示下一个回文日期第二…...
Zotero拓展功能之Zotero Style
Zotero Style拓展功能 一、列: 1.简介 首先你必须知道Zotero的基本功能:右键任意一个列的名字,会弹出一个右键菜单,你可以勾选/取消勾选一个列,并且在最后有两个按钮,一个是“列设置”,一个是…...

小程序提交表单之后,清除表单form
构造表单 <form bindsubmit"bindFormSubmit"> <view class"main"><textarea name"textarea" value"{{content}}"></textarea> <button form-type"submit" type"primary" > 提交 &…...
Java程序设计实验5 | Java API应用
*本文是博主对Java各种实验的再整理与详解,除了代码部分和解析部分,一些题目还增加了拓展部分(⭐)。拓展部分不是实验报告中原有的内容,而是博主本人自己的补充,以方便大家额外学习、参考。 (解…...

如何高效生成Beyond Compare 5授权密钥:3种实战方案完整指南
如何高效生成Beyond Compare 5授权密钥:3种实战方案完整指南 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen Beyond Compare 5作为专业文件对比工具,在软件开发、系统维护…...

Java NIO 与异步 IO 对比
Java NIO与异步IO对比:高并发场景下的技术选型 在当今高并发的网络应用中,如何高效处理I/O操作成为开发者关注的核心问题。Java NIO(Non-blocking I/O)和异步IO(如AIO)是两种主流的解决方案,它…...

Claude Code vs ChatGPT Codex 深度对比:2026 年哪款 AI 编程工具更适合你?
⚔️ 深度对比评测 客观中立 📅 2026 年 4 月 | ⏱ 阅读约 10 分钟 目录 工具概览安装与上手难度定价与订阅代码质量与生成能力指令遵循能力上下文理解与记忆系统生态系统与扩展能力综合评分适用场景推荐总结与选购建议 一、工具概览 2025-2026 年,AI…...

TwitchDropsMiner:解放双手,轻松获取游戏奖励的智能助手
TwitchDropsMiner:解放双手,轻松获取游戏奖励的智能助手 【免费下载链接】TwitchDropsMiner An app that allows you to AFK mine timed Twitch drops, with automatic drop claiming and channel switching. 项目地址: https://gitcode.com/GitHub_Tr…...

Mac鼠标滚轮卡顿终结者:Mos平滑滚动终极配置指南
Mac鼠标滚轮卡顿终结者:Mos平滑滚动终极配置指南 【免费下载链接】Mos 一个用于在 macOS 上平滑你的鼠标滚动效果或单独设置滚动方向的小工具, 让你的滚轮爽如触控板 | A lightweight tool used to smooth scrolling and set scroll direction independently for yo…...

不止于仿真:用HFSS优化威尔金森功分器,聊聊实际PCB加工的那些事儿
从仿真到量产:HFSS威尔金森功分器设计中的PCB工程实践 当我们在HFSS中看到那条完美的S参数曲线时,常会陷入一种技术幻觉——仿佛点击"仿真完成"按钮就意味着产品已经成功。直到第一块实物PCB测试结果摆在面前,回波损耗比仿真结果恶…...
)
从零到生产:在CentOS 8 Stream上部署ClickHouse集群的完整指南(含单机版前置步骤与性能调优建议)
从零到生产:在CentOS 8 Stream上部署ClickHouse集群的完整指南 ClickHouse作为一款开源的列式数据库管理系统,凭借其卓越的查询性能和高吞吐量,已成为大数据分析领域的明星产品。本文将带您从单机部署开始,逐步构建一个面向生产环…...

用LVGL官方Demo给你的STM32 TFT屏快速做个UI原型:以Widgets Demo为例
用LVGL官方Demo为STM32 TFT屏构建高效UI原型:Widgets Demo实战指南 在智能家居控制面板或工业HMI设备的开发初期,UI原型验证往往是最耗时的环节之一。传统做法需要从零开始设计按钮、滑块、图表等基础组件,而LVGL(Light and Versa…...
)
别再买万用表了!手把手教你用51单片机和ADC0809自制一个高精度数字电压表(附完整代码)
51单片机ADC0809实战:从零打造高精度数字电压表 记得三年前我第一次接触电子测量设备时,被市面上动辄上千元的数字万用表价格吓了一跳。作为一名电子爱好者兼穷学生,我开始思考:能否用最基础的51单片机和ADC0809模数转换器&#x…...

在VMware里复活Windows Neptune:一份给怀旧极客的详细安装与体验指南
在VMware里复活Windows Neptune:一份给怀旧极客的详细安装与体验指南 如果你是一位对操作系统历史充满好奇的技术爱好者,那么Windows Neptune这个名字一定会让你心跳加速。作为微软从未正式发布的"失落环节",Neptune代表了Windows …...