win10 下 ros + Qt 工程CMakeLists.txt
win10 下 ros + Qt 工程CMakeLists.txt
系统:win10
ros: melodic
Qt: 5.12.12
源码目录: D:\workspace\catkin_qt
示例代码 https://github.com/ncnynl/ros-qt.git
由于示例代码是Qt4 ,目前我是用QT5,所以CMakeLists.txt 修改如下
CMakeLists.txt
##############################################################################
# CMake
##############################################################################cmake_minimum_required(VERSION 2.8.0)
project(msg)set (TARGET msg)set(CMAKE_CXX_STANDARD 11)
add_compile_options(-std=c++11)##############################################################################
# Catkin
##############################################################################find_package(catkin REQUIRED COMPONENTSroscppstd_msgs
)include_directories(${catkin_INCLUDE_DIRS}# include ui generate .h file${CMAKE_BINARY_DIR}/code02-msg
)
# Use this to define what the package will export (e.g. libs, headers).
# Since the default here is to produce only a binary, we don't worry about
# exporting anything.
catkin_package()##############################################################################
# Qt Environment
################################################################################ This setting causes Qt's "MOC" generation to happen automatically.
# set(CMAKE_AUTOMOC ON)
# set(CMAKE_AUTOUIC ON)
# set(CMAKE_AUTORCC ON)find_package(Qt5 COMPONENTS Gui Widgets Core REQUIRED)
set(QT_LIBRARIES Qt5::Gui Qt5::Widgets)##############################################################################
# Sections
############################################################################################################################################################
# Sources
##############################################################################file(GLOB_RECURSE SOURCES RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS src/*.cpp)
file(GLOB_RECURSE HEADERS RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS include/msg/*.hpp)
file(GLOB_RECURSE RESOURCES RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS resources/*.qrc)
file(GLOB_RECURSE UI RELATIVE ${CMAKE_CURRENT_SOURCE_DIR} FOLLOW_SYMLINKS ui/*.ui)qt5_wrap_cpp(SOURCES ${HEADERS})
qt5_wrap_ui(SOURCES ${UI})
qt5_add_resources(SOURCES ${RESOURCES})##############################################################################
# Binaries
##############################################################################add_executable(${TARGET} ${SOURCES} )
target_link_libraries(${TARGET} ${QT_LIBRARIES} ${catkin_LIBRARIES})
install(TARGETS ${TARGET} RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})message("CATKIN_PACKAGE_BIN_DESTINATION : " ${CATKIN_PACKAGE_BIN_DESTINATION})
message("CATKIN_PACKAGE_ETC_DESTINATION : " ${CATKIN_PACKAGE_ETC_DESTINATION})
message("CATKIN_PACKAGE_INCLUDE_DESTINATION : " ${CATKIN_PACKAGE_INCLUDE_DESTINATION})
message("CATKIN_PACKAGE_LIB_DESTINATION : " ${CATKIN_PACKAGE_LIB_DESTINATION})
message("CATKIN_PACKAGE_PYTHON_DESTINATION : " ${CATKIN_PACKAGE_PYTHON_DESTINATION})
message("CATKIN_PACKAGE_SHARE_DESTINATION : " ${CATKIN_PACKAGE_SHARE_DESTINATION})
message("CMAKE_BINARY_DIR":${CMAKE_BINARY_DIR})编译
win10下 打开 ros-melodic 命令行快捷方式:
切换到工作目录 :
C:\Windows\System32> cd /d D:\workspace\catkin_qt
添加工作目录环境变量:
D:\workspace\catkin_qt> cmd /k D:\workspace\catkin_qt\devel\setup.bat
catkin_make
运行
roscore
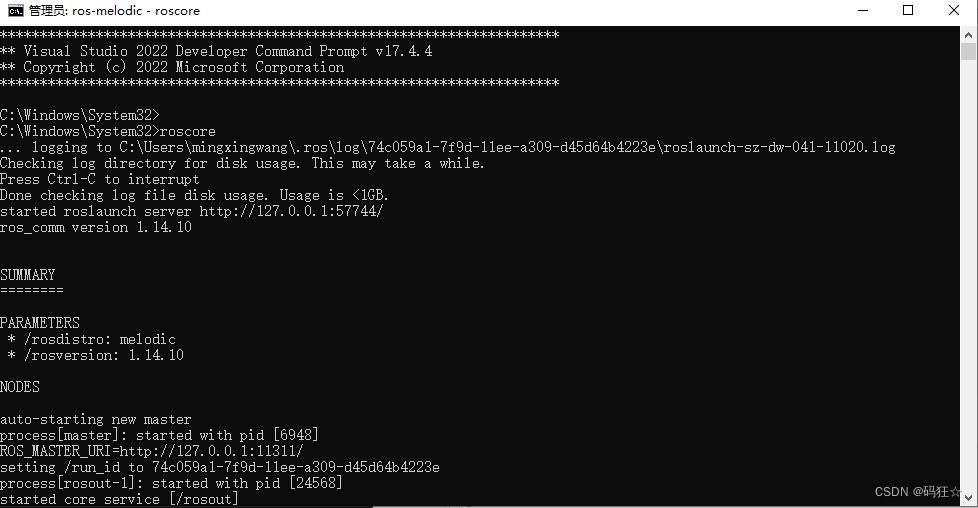
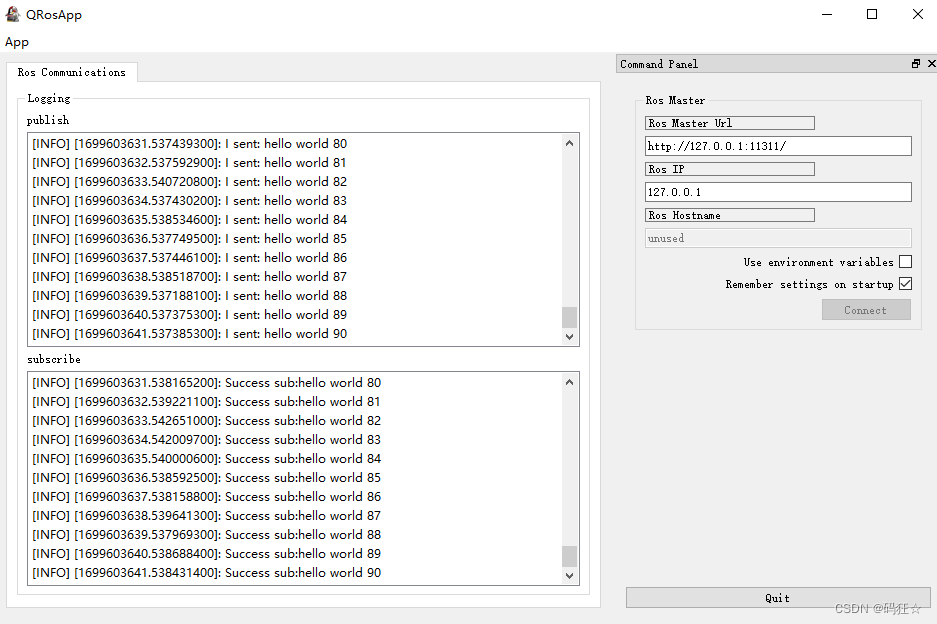
rosrun msg msg
相关文章:
win10 下 ros + Qt 工程CMakeLists.txt
win10 下 ros Qt 工程CMakeLists.txt 系统:win10 ros: melodic Qt: 5.12.12 源码目录: D:\workspace\catkin_qt 示例代码 https://github.com/ncnynl/ros-qt.git 由于示例代码是Qt4 ,目前我是用QT5,所以CMakeLists.txt 修改如下 CMakeLists.txt #####…...
Scala中编写多线程爬虫程序并做可视化处理
目录 一、引言 二、Scala爬虫程序的实现 1、引入必要的库 2、定义爬虫类 3、可视化处理 三、案例分析:使用Scala爬取并可视化处理电影数据 1、定义爬虫类 2、实现爬虫程序的控制逻辑 3、可视化处理电影数据 四、总结 一、引言 随着互联网的快速发展&#…...

使用 huggingface_hub 镜像下载 大模型
download.py 👇 import os # 配置 hf镜像 os.environ[HF_ENDPOINT] https://hf-mirror.com# 设置保存的路径 local_dir "XXXXXX"# 设置仓库id model_id "sensenova/piccolo-large-zh"cmd f"huggingface-cli download --resume-downlo…...
,剑指offer,力扣)
路径加密(替换空格),剑指offer,力扣
目录 我们直接看题解吧: 方法: 审题目事例提示: 解题思路: 法1: 代码(法1): 法2: 代码(法2): 原题解: 【剑指Offer】2、替…...
HarmonyOS开发:UI开展前的阶段总结
前言 关于HarmonyOS,陆陆续续总结了有14篇的文章,大家可以发现,没有一篇是关于UI相关的,不是自己没有分享的打算,而是对于这些UI而言,官方都有着一系列的文档输出,如果我再一一的分享࿰…...

Linux安装Libreoffice
windos安装Libreoffice https://zh-cn.libreoffice.org/ C:\路径\LibreOffice\program\soffice.bin --help 看是否输出帮助命令 Linux安装Libreoffice 1、下载rpm包并解压https://mirrors.cloud.tencent.com/libreoffice/libreoffice/stable/ 2、安装: yum install…...
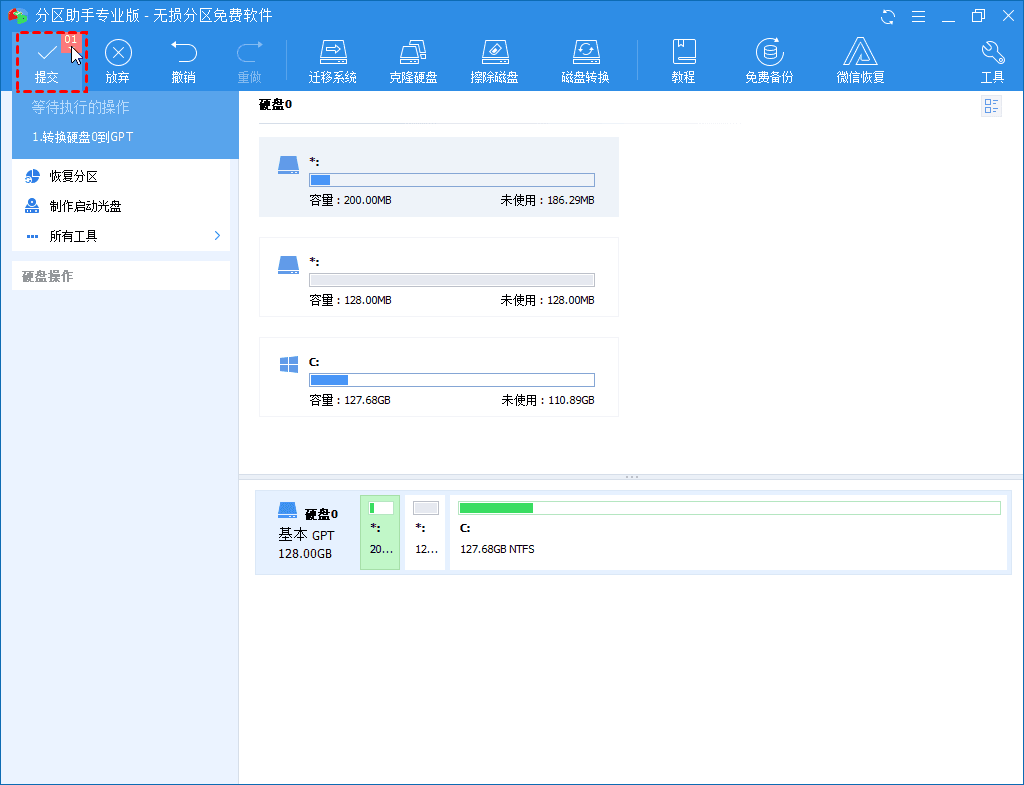
如何将系统盘MBR转GPT?无损教程分享!
什么是MBR和GPT? MBR和GPT是磁盘的两种分区形式:MBR(主引导记录)和GPT(GUID分区表)。 新硬盘不能直接用来保存数据。使用前应将其初始化为MBR或GPT分区形式。但是,如果您在MBR时需…...
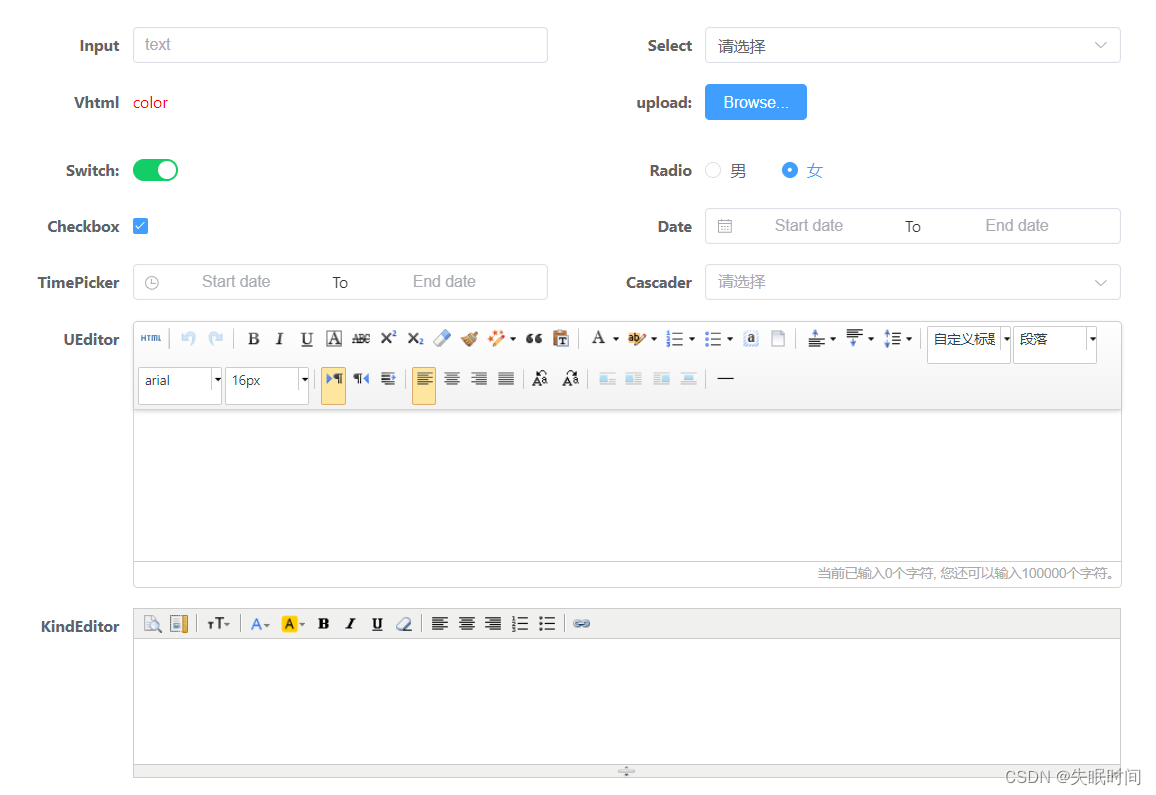
基于element-plus定义表单配置化
文章目录 前言一、配置化的前提二、配置的相关组件1、新建form.vue组件2、新建input.vue组件3、新建select.vue组件4、新建v-html.vue组件5、新建upload.vue组件6、新建switch.vue组件7、新建radio.vue组件8、新建checkbox.vue组件9、新建date.vue组件10、新建time-picker.vue组…...
|LeetCode122. 买卖股票的最佳时机 II、LeetCoed55. 跳跃游戏、LeetCode45. 跳跃游戏 II)
LeetCode算法题解(贪心)|LeetCode122. 买卖股票的最佳时机 II、LeetCoed55. 跳跃游戏、LeetCode45. 跳跃游戏 II
一、LeetCode122. 买卖股票的最佳时机 II 题目链接:122. 买卖股票的最佳时机 II 题目描述: 给你一个整数数组 prices ,其中 prices[i] 表示某支股票第 i 天的价格。 在每一天,你可以决定是否购买和/或出售股票。你在任何时候 …...

计蒜客详解合集(2)期
目录 T1126——单词倒排 T1617——地瓜烧 T1612——蒜头君的数字游戏 T1488——旋转单词 T1461——校验信用卡号码 T1437——最大值和次大值 T1126——单词倒排 超级水的一道题,和T1122类似但更简单,分割后逆序输出即可~ 编写程序,读入…...
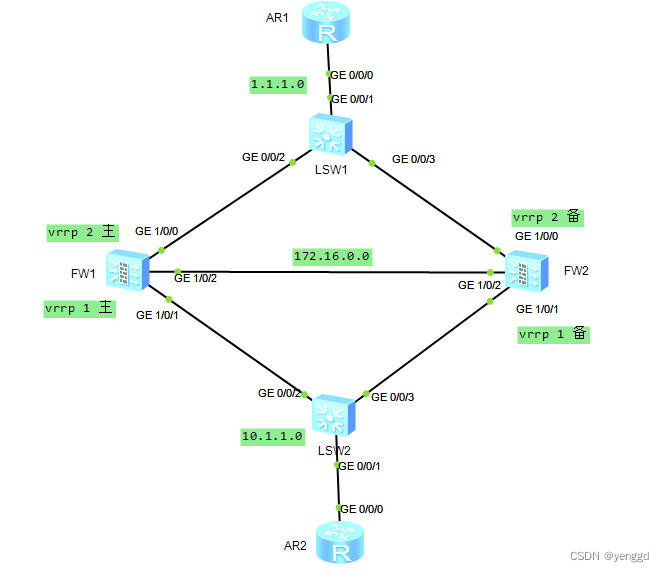
华为防火墙vrrp+hrp双机热备主备备份(两端为交换机)
默认上下来全两个vrrp主都是左边 工作原理: vrrp刚开机都是先initialize状态,然后切成active或standb状态。 hrp使用18514端口,且用的单播,要策略放行,由主设备发hrp心跳报文 如果设备为acitve状态时自动优先级为65…...
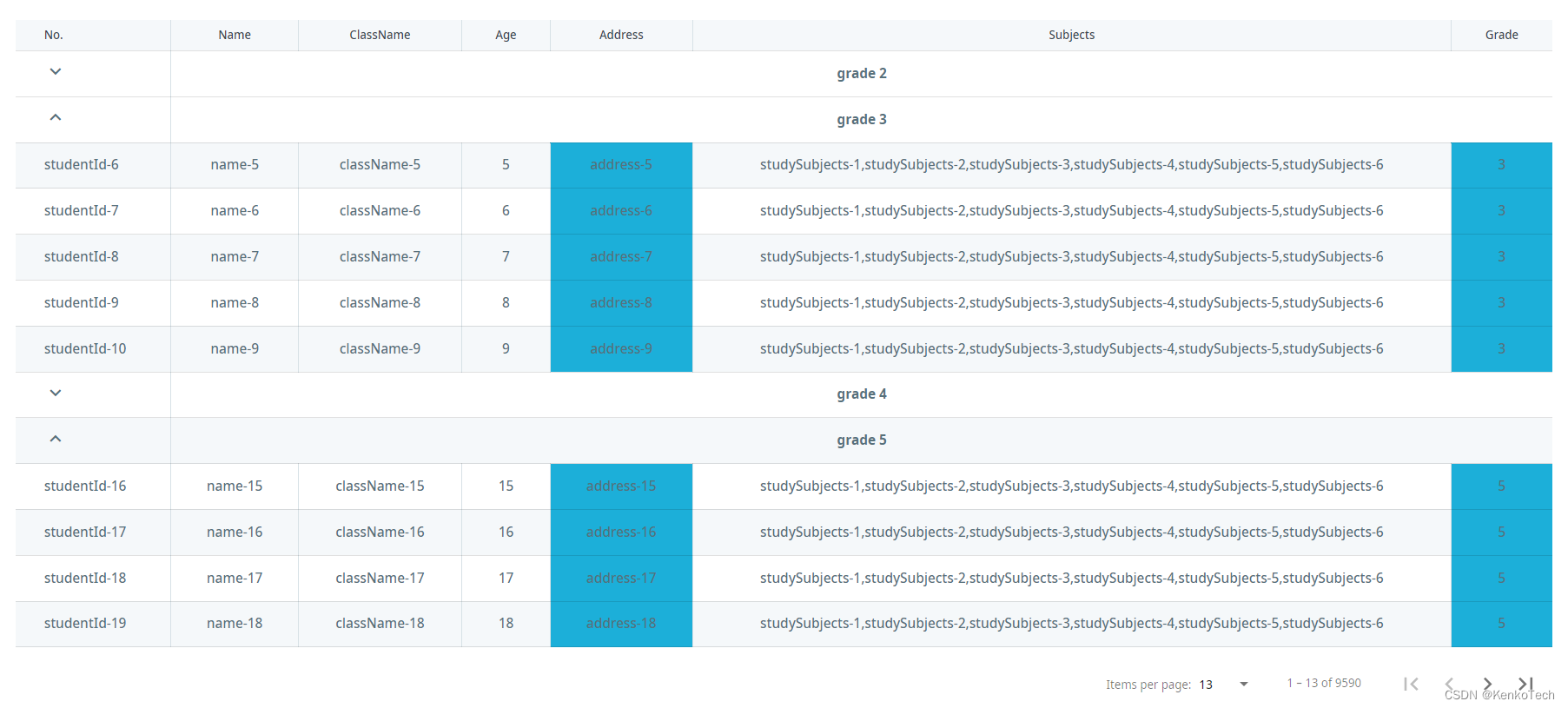
Angular 由一个bug说起之一:List / Grid的性能问题
在angular中,MatTable构建简单,使用范围广。但某些时候会出现卡顿 卡顿情景: 1:一次性请求太多的数据 2:一次性渲染太多数据,这会花费CPU很多时间 3:行内嵌套复杂的元素 4:使用过多的…...

第12章 PyTorch图像分割代码框架-3:推理与部署
推理模块 模型训练完成后,需要单独再写一个推理模块来供用户测试或者使用,该模块可以命名为test.py或者inference.py,导入训练好的模型文件和待测试的图像,输出该图像的分割结果。inference.py主体部分如代码11-7所示。 代码11-7 …...

MYSQL---基础篇
一、数据库操作 1.创建数据库:CREATE DATABASE db_test1; 2.使用数据库:use 数据库名; 3.删除数据库:DROP DATABASE [IF EXISTS] db_name; 4.创建表:CREATE TABLE table_name ( field1 datatype, field2…...
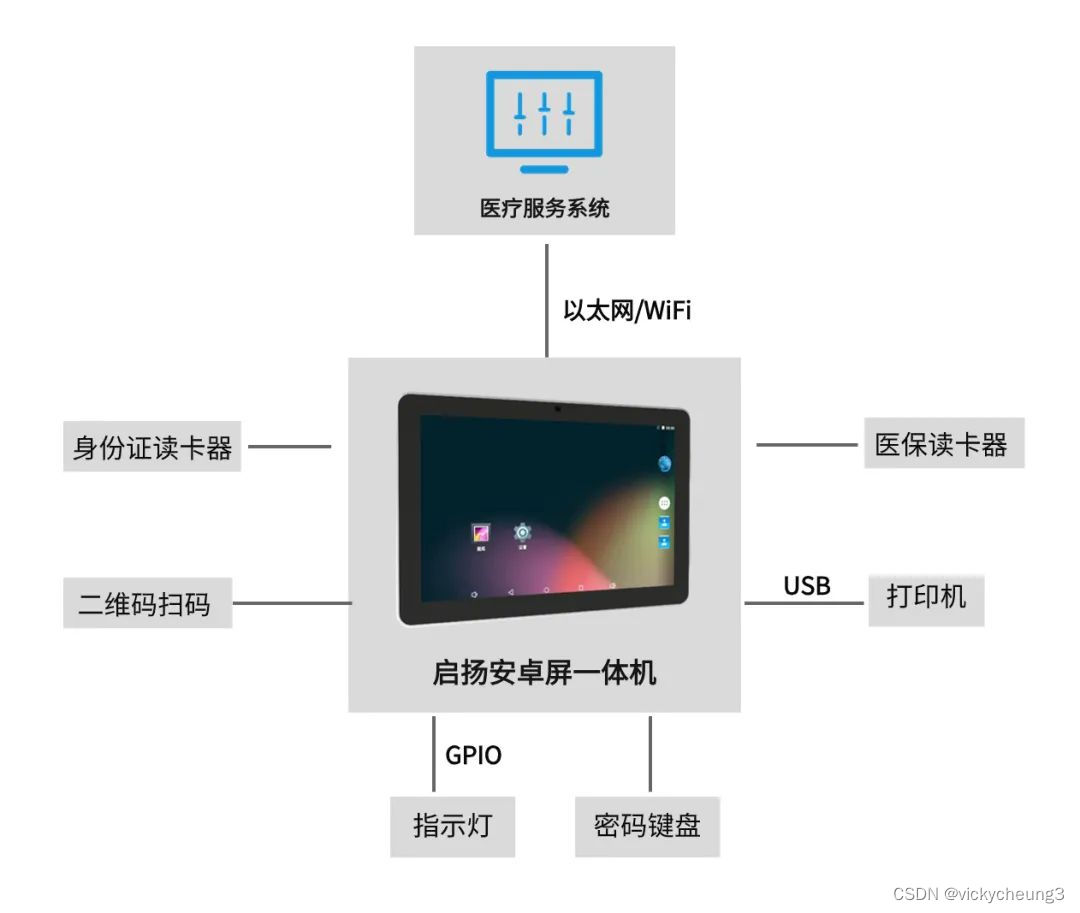
【启扬方案】启扬安卓屏一体机在医疗自助服务终端上的应用解决方案
为了解决传统医疗模式下的“看病难、看病慢”等问题,提高医疗品质、效率与效益,自助服务业务的推广成为智慧医疗领域实现信息化建设、高效运作的重要环节。 医疗自助服务终端是智慧医疗应用场景中最常见的智能设备之一,它通过与医院信息化系统…...

收藏!7个国内「小众」的程序员社区
技术社区是大量开发者的集聚地,在技术社区可以了解到行业的最新进展,学习最前沿的技术,认识有相同爱好的朋友,在一起学习和交流。 国内知名的技术社区有CSDN、博客园、开源中国、51CTO,还有近两年火热的掘金ÿ…...

LeetCode(4)删除有序数组中的重复项 II【数组/字符串】【中等】
目录 1.题目2.答案3.提交结果截图 链接: 80. 删除有序数组中的重复项 II 1.题目 给你一个有序数组 nums ,请你** 原地** 删除重复出现的元素,使得出现次数超过两次的元素只出现两次 ,返回删除后数组的新长度。 不要使用额外的数…...

C++ 同构字符串/ 单词规律
给定两个字符串 s 和 t ,判断它们是否是同构的。 如果 s 中的字符可以按某种映射关系替换得到 t ,那么这两个字符串是同构的。 每个出现的字符都应当映射到另一个字符,同时不改变字符的顺序。不同字符不能映射到同一个字符上,相…...

oracle 中 %TYPE %ROWTYPE
前言 PL/SQL 提供了 %TYPE 和 %ROWTYPE 两种特殊的变量,用于声明与表的列相匹配的变量和用户定义数据类型,前一个表示单属性的数据类型,后一个表示整个属性列表的结构,即元组的类型。 举例: -- 数据表TB_TRANS_RECO…...
-计算机视觉基础)
Pytorch实战教程(五)-计算机视觉基础
0. 前言 计算机视觉是指通过计算机系统对图像和视频进行处理和分析,利用计算机算法和方法,使计算机能够模拟和理解人类的视觉系统。通过计算机视觉技术,计算机可以从图像和视频中提取有用的信息,实现对环境的感知和理解,从而帮助人们解决各种问题和提高效率。本节中,将介…...

Xournal++ 终极指南:如何让手写笔记在高分辨率屏幕上清晰如纸 ✨
Xournal 终极指南:如何让手写笔记在高分辨率屏幕上清晰如纸 ✨ 【免费下载链接】xournalpp Xournal is a handwriting notetaking software with PDF annotation support. Written in C with GTK3, supporting Linux (e.g. Ubuntu, Debian, Arch, SUSE), macOS and …...

告别重复劳动:5分钟掌握Python剪映自动化,视频剪辑效率提升10倍!
告别重复劳动:5分钟掌握Python剪映自动化,视频剪辑效率提升10倍! 【免费下载链接】JianYingApi Third Party JianYing Api. 第三方剪映Api 项目地址: https://gitcode.com/gh_mirrors/ji/JianYingApi 你是否厌倦了每天重复同样的视频剪…...

氮化铝缓冲层 HEMT最新研究
核心突破:打破功率瓶颈此前,业界普遍认为基于氮化铝(AlN)缓冲层的 HEMT 器件,其连续波(CW)输出功率难以超过 6 W/mm。这导致许多人对该技术持怀疑态度,尽管 AlN 拥有极佳的导热性能&…...

NODE:表格数据的深度学习新架构
神经 oblivious 决策集成(NODE)——用于表格数据的先进深度学习算法——深度与浅层 神经 oblivious 决策集成(NODE)是一种针对表格数据设计的深度学习架构。它借鉴了决策树集成(如随机森林、梯度提升树)的优…...

WorkshopDL:打破平台壁垒的模组自由之门
WorkshopDL:打破平台壁垒的模组自由之门 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 想象一下,您在Epic Games Store上购买了一款心仪已久的游戏&…...
)
避坑指南:在Ubuntu 18.04上搞定RK3568的RKNN环境(附Python 3.6.x和Numpy 1.16.6配置)
RK3568开发环境避坑全指南:从零搭建RKNN-Toolkit2的终极方案 在边缘计算设备开发中,Rockchip的RK3568凭借其强大的NPU性能成为众多AI项目的首选平台。但初次接触RKNN开发套件的工程师们,往往会在环境配置阶段遭遇各种"暗坑"——从P…...

Windows Defender移除工具完整指南:如何彻底禁用Windows安全中心
Windows Defender移除工具完整指南:如何彻底禁用Windows安全中心 【免费下载链接】windows-defender-remover A tool which is uses to remove Windows Defender in Windows 8.x, Windows 10 (every version) and Windows 11. 项目地址: https://gitcode.com/gh_m…...

NVIDIA Profile Inspector深度指南:解锁显卡隐藏潜能的专业工具
NVIDIA Profile Inspector深度指南:解锁显卡隐藏潜能的专业工具 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector 你是否曾经好奇,为什么同样的显卡配置,别人的游戏画面…...
、多卡扩展(NCCL配置))
PyTorch 2.8镜像多场景落地:支持单卡训练(RTX 4090D)、多卡扩展(NCCL配置)
PyTorch 2.8镜像多场景落地:支持单卡训练(RTX 4090D)、多卡扩展(NCCL配置) 1. 镜像概述与核心优势 PyTorch 2.8深度学习镜像为RTX 4090D显卡深度优化的通用训练/推理环境,基于CUDA 12.4和驱动550.90.07构…...

为什么工业场景首选C# + YOLO?从底层原理到架构设计的深度剖析
引言 在智能制造全面推进的今天,机器视觉已经成为工业产线的"眼睛"。从产品缺陷检测到物料计数,从机器人定位引导到设备状态识别,视觉技术正在重塑工业生产的每一个环节。然而,在技术选型的十字路口,无数工程…...