Unity中全局光照GI的总结
文章目录
- 前言
- 一、在编写Shader时,有一些隐蔽的Bug不会直接报错,我们需要编译一下让它显示出来,方便修改
- 我们选择我们的Shader,点击编译并且展示编译后的Shader后的内容,隐蔽的Bug就会暴露出来了。
- 二、我们大概回顾一下,之前实现的内容,和应用场景(然后,可以在以后的项目中按需选择取舍)
- 1、第一个Pass是我们模型的主要效果
- 2、第二个Pass是我们模型阴影的投射(在不需要时可以剔除该Pass)
- 3、第三个Pass是我们模型烘焙计算(在不需要时可以剔除该Pass)
前言
Unity中全局光照GI的总结,我们对之前文章中,实现的 全局光照 GI Shader 总结一下
-
Unity中Shader的全局照明简介
-
Unity中Shader自定义cginc文件
-
Unity中Shader的GI相关数据的准备
-
Unity中Shader的烘培分支的判断
-
Unity中Shader的GI的直接光实现
-
Unity中Shader的GI的间接光实现
-
Unity中Shader再议ATTENUATION
-
Unity中Shader光照探针的支持
-
Unity中Shader的间接光的产生Meta Pass
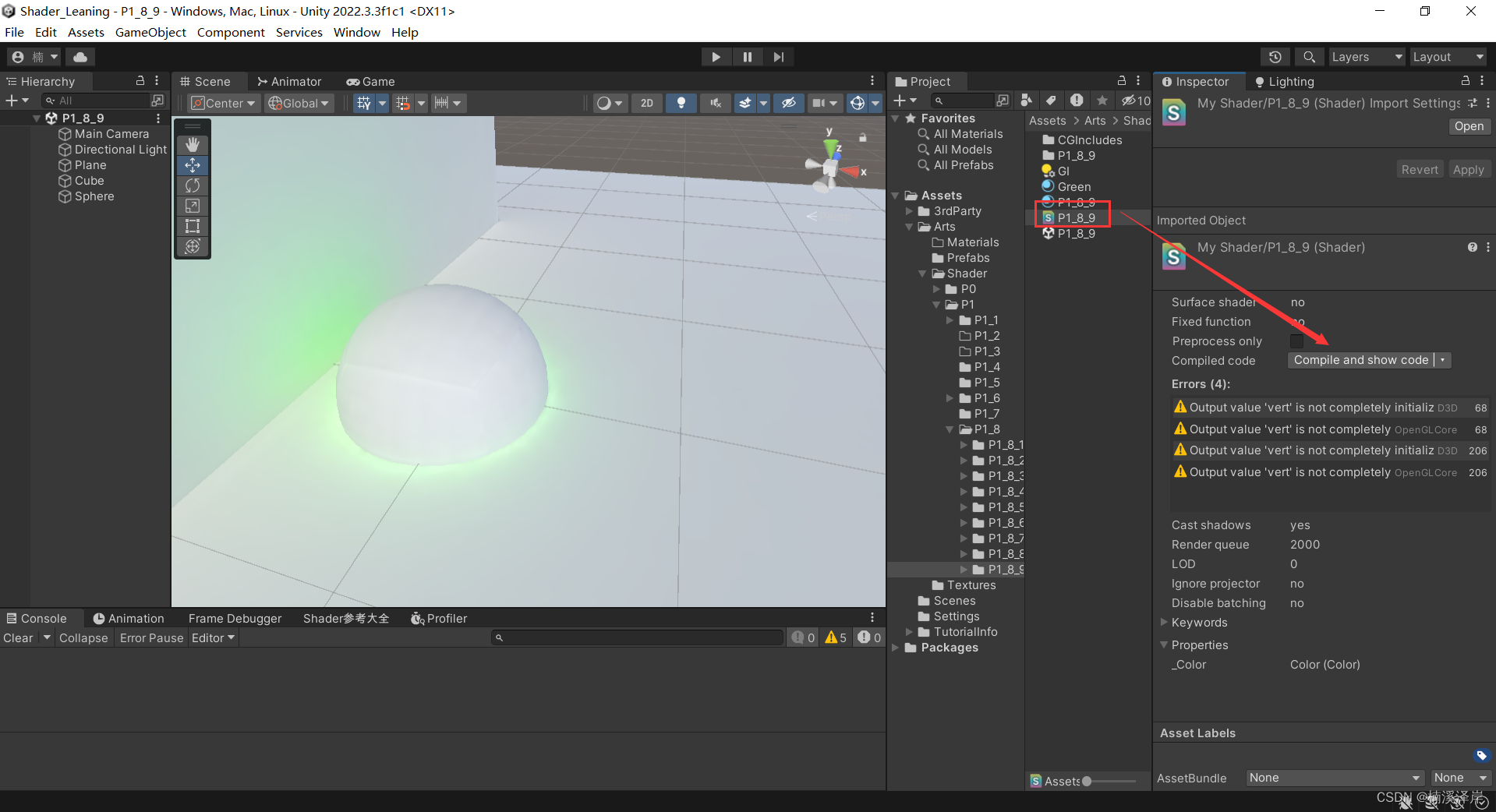
一、在编写Shader时,有一些隐蔽的Bug不会直接报错,我们需要编译一下让它显示出来,方便修改
我们选择我们的Shader,点击编译并且展示编译后的Shader后的内容,隐蔽的Bug就会暴露出来了。
二、我们大概回顾一下,之前实现的内容,和应用场景(然后,可以在以后的项目中按需选择取舍)
1、第一个Pass是我们模型的主要效果
- 在该Pass的片元着色器中,对于计算 GI 的这个函数,我们可以选择使用Unity自带的函数(在项目确定只用某一套 GI 方案时,可以只选择该函数中的部分功能使用)

- 在该Pass的片元着色器中,对于同时计算了 Lambert 和 Phone 光照模型的这个函数(我们可以按照公式自定义实现,也可以直接使用)

2、第二个Pass是我们模型阴影的投射(在不需要时可以剔除该Pass)
3、第三个Pass是我们模型烘焙计算(在不需要时可以剔除该Pass)
该GI的最终代码:
MyGlobalIllumination.cginc
#ifndef MYGLOBALILLUMINATION_INCLUDE
#define MYGLOBALILLUMINATION_INCLUDE//Lambert光照模型
inline fixed4 UnityLambertLight1 (SurfaceOutput s, UnityLight light)
{fixed diff = max (0, dot (s.Normal, light.dir));fixed4 c;c.rgb = s.Albedo * light.color * diff;c.a = s.Alpha;return diff;
}inline fixed4 LightingLambert1 (SurfaceOutput s, UnityGI gi)
{fixed4 c;c = UnityLambertLight1 (s, gi.light);//如果是在 BackedGI 或者 RealtimeGI的情况下,进行以下计算#ifdef UNITY_LIGHT_FUNCTION_APPLY_INDIRECTc.rgb += s.Albedo * gi.indirect.diffuse;#endifreturn c;
}inline void ResetUnityLight1(out UnityLight outLight)
{outLight.color = half3(0, 0, 0);outLight.dir = half3(0, 1, 0); // Irrelevant direction, just not nulloutLight.ndotl = 0; // Not used
}inline void ResetUnityGI1(out UnityGI outGI)
{ResetUnityLight1(outGI.light);outGI.indirect.diffuse = 0;outGI.indirect.specular = 0;
}inline UnityGI UnityGI_Base1(UnityGIInput data, half occlusion, half3 normalWorld)
{UnityGI o_gi;ResetUnityGI1(o_gi);//计算在Distance Shadowmask 中实时阴影与烘培阴影的混合过程// Base pass with Lightmap support is responsible for handling ShadowMask / blending here for performance reason#if defined(HANDLE_SHADOWS_BLENDING_IN_GI)half bakedAtten = UnitySampleBakedOcclusion(data.lightmapUV.xy, data.worldPos);float zDist = dot(_WorldSpaceCameraPos - data.worldPos, UNITY_MATRIX_V[2].xyz);float fadeDist = UnityComputeShadowFadeDistance(data.worldPos, zDist);data.atten = UnityMixRealtimeAndBakedShadows(data.atten, bakedAtten, UnityComputeShadowFade(fadeDist));#endif//将主平行灯的信息存储起来o_gi.light = data.light;//将衰减用于灯光颜色中o_gi.light.color *= data.atten;//是否进行球谐光照(即是否使用光照探针)#if UNITY_SHOULD_SAMPLE_SHo_gi.indirect.diffuse = ShadeSHPerPixel(normalWorld, data.ambient, data.worldPos);#endif//这个是进行静态 GI 的计算(BackedGI)#if defined(LIGHTMAP_ON)// Baked lightmaps//光照图的采样half4 bakedColorTex = UNITY_SAMPLE_TEX2D(unity_Lightmap, data.lightmapUV.xy);half3 bakedColor = DecodeLightmap(bakedColorTex);//当开启 Unity 中的 Directional 模式 (定向光模式)时,进行的计算#ifdef DIRLIGHTMAP_COMBINEDfixed4 bakedDirTex = UNITY_SAMPLE_TEX2D_SAMPLER (unity_LightmapInd, unity_Lightmap, data.lightmapUV.xy);o_gi.indirect.diffuse += DecodeDirectionalLightmap (bakedColor, bakedDirTex, normalWorld);#if defined(LIGHTMAP_SHADOW_MIXING) && !defined(SHADOWS_SHADOWMASK) && defined(SHADOWS_SCREEN)ResetUnityLight(o_gi.light);o_gi.indirect.diffuse = SubtractMainLightWithRealtimeAttenuationFromLightmap (o_gi.indirect.diffuse, data.atten, bakedColorTex, normalWorld);#endif#else // not directional lightmapo_gi.indirect.diffuse += bakedColor;#if defined(LIGHTMAP_SHADOW_MIXING) && !defined(SHADOWS_SHADOWMASK) && defined(SHADOWS_SCREEN)ResetUnityLight(o_gi.light);o_gi.indirect.diffuse = SubtractMainLightWithRealtimeAttenuationFromLightmap(o_gi.indirect.diffuse, data.atten, bakedColorTex, normalWorld);#endif#endif#endif//这个是进行动态 GI 的计算(RealtimeGI)#ifdef DYNAMICLIGHTMAP_ON// Dynamic lightmapsfixed4 realtimeColorTex = UNITY_SAMPLE_TEX2D(unity_DynamicLightmap, data.lightmapUV.zw);half3 realtimeColor = DecodeRealtimeLightmap (realtimeColorTex);#ifdef DIRLIGHTMAP_COMBINEDhalf4 realtimeDirTex = UNITY_SAMPLE_TEX2D_SAMPLER(unity_DynamicDirectionality, unity_DynamicLightmap, data.lightmapUV.zw);o_gi.indirect.diffuse += DecodeDirectionalLightmap (realtimeColor, realtimeDirTex, normalWorld);#elseo_gi.indirect.diffuse += realtimeColor;#endif#endif//这里是使物体表面的颜色 乘以 环境光遮蔽,以实现环境光线被阻碍后物体表面的颜色o_gi.indirect.diffuse *= occlusion;return o_gi;
}inline UnityGI UnityGlobalIllumination1 (UnityGIInput data, half occlusion, half3 normalWorld)
{return UnityGI_Base1(data, occlusion, normalWorld);
}inline void LightingLambert_GI1 (SurfaceOutput s,UnityGIInput data,inout UnityGI gi)
{gi = UnityGlobalIllumination1 (data, 1.0, s.Normal);
}#endifGI Shader 代码:
//在这里里面使用 自定义的 cginc 来实现全局GI
//GI数据的准备
//烘培分支的判断
//GI的直接光实现
//GI的间接光实现
//再议ATTENUATION
//光照探针的支持
//间接光的产生Meta Pass
Shader "MyShader/P1_8_9"
{Properties{_Color("Color",Color) = (1,1,1,1)}SubShader{Tags{"RenderType"="Opaque"}Pass{Tags{"LightMode"="ForwardBase"}CGPROGRAM#pragma vertex vert#pragma fragment frag#pragma multi_compile_fwdbase#include "UnityCG.cginc"#include "AutoLight.cginc"#include "Lighting.cginc"#include "CGIncludes/MyGlobalIllumination.cginc"struct appdata{float4 vertex : POSITION;//定义第二套 UV ,appdata 对应的固定语义为 TEXCOORD1#if defined(LIGHTMAP_ON) || defined(DYNAMICLIGHTMAP_ON)float4 texcoord1 : TEXCOORD1;#endifhalf3 normal : NORMAL;float4 texcoord2 : TEXCOORD2;};struct v2f{float4 pos : SV_POSITION;float4 worldPos : TEXCOORD;//定义第二套UV#if defined(LIGHTMAP_ON) || defined(DYNAMICLIGHTMAP_ON)float4 lightmapUV : TEXCOORD1;#endifhalf3 worldNormal : NORMAL;half3 sh : TEXCOORD2;//1、使用 阴影采样 和 光照衰减的方案的 第一步//同时定义灯光衰减以及实时阴影采样所需的插值器UNITY_LIGHTING_COORDS(3, 4)//UNITY_SHADOW_COORDS(2)};v2f vert(appdata v){v2f o;o.pos = UnityObjectToClipPos(v.vertex);o.worldPos = mul(unity_ObjectToWorld, v.vertex);o.worldNormal = UnityObjectToWorldNormal(v.normal);//对第二套UV进行纹理采样#if defined(LIGHTMAP_ON) || defined(DYNAMICLIGHTMAP_ON)o.lightmapUV.xy = v.texcoord1 * unity_LightmapST.xy + unity_LightmapST.zw;#endif//实现 球谐 或者 环境色 和 顶点照明 的计算//SH/ambient and vertex lights#ifndef LIGHTMAP_ON //当此对象没有开启静态烘焙时#if UNITY_SHOULD_SAMPLE_SH && !UNITY_SAMPLE_FULL_SH_PER_PIXELo.sh = 0;//近似模拟非重要级别的点光在逐顶点上的光照效果#ifdef VERTEXLIGHT_ONo.sh += Shade4PointLights(unity_4LightPosX0,unity_4LightPosY0,unity_4LightPosZ0,unity_LightColor[0].rgb,unity_LightColor[1].rgb,unity_LightColor[2].rgb,unity_LightColor[3].rgb,unity_4LightAtten0,o.worldPos,o.worldNormal);#endifo.sh = ShadeSHPerVertex(o.worldNormal,o.sh);#endif#endif//2、使用 阴影采样 和 光照衰减的方案的 第二步UNITY_TRANSFER_LIGHTING(o, v.texcoord2.xy)//TRANSFER_SHADOW(o)return o;}fixed4 frag(v2f i) : SV_Target{//1、准备 SurfaceOutput 的数据SurfaceOutput o;//目前先初始化为0,使用Unity自带的方法,把结构体中的内容初始化为0UNITY_INITIALIZE_OUTPUT(SurfaceOutput, o)o.Albedo = 1;o.Normal = i.worldNormal;//1、代表灯光的衰减效果//2、实时阴影的采样UNITY_LIGHT_ATTENUATION(atten, i, i.worldPos);//2、准备 UnityGIInput 的数据UnityGIInput giInput;//初始化UNITY_INITIALIZE_OUTPUT(UnityGIInput, giInput);//修改用到的数据giInput.light.color = _LightColor0;giInput.light.dir = _WorldSpaceLightPos0;giInput.worldPos = i.worldPos;giInput.worldViewDir = normalize(_WorldSpaceCameraPos - i.worldPos);giInput.atten = atten;giInput.ambient = 0;#if UNITY_SHOULD_SAMPLE_SH && !UNITY_SAMPLE_FULL_SH_PER_PIXELgiInput.ambient = i.sh;#elsegiInput.ambient = 0.0;#endif#if defined(DYNAMICLIGHTMAP_ON) || defined(LIGHTMAP_ON)giInput.lightmapUV = i.lightmapUV;#endif//3、准备 UnityGI 的数据UnityGI gi;//直接光照数据(主平行光)gi.light.color = _LightColor0;gi.light.dir = _WorldSpaceLightPos0;//间接光照数据(目前先给0)gi.indirect.diffuse = 0;gi.indirect.specular = 0;//GI的间接光照的计算 LightingLambert_GI1(o, giInput, gi);//查看Unity源码可知,计算间接光照最主要的函数就是//inline UnityGI UnityGI_Base1(UnityGIInput data, half occlusion, half3 normalWorld)//所以我们直接给 gi 赋值,可以不使用 LightingLambert_GI1gi = UnityGI_Base1(giInput, 1, o.Normal);//GI的直接光照的计算//我们在得到GI的数据后,对其进行Lambert光照模型计算,即可得到结果fixed4 c = LightingLambert1(o, gi);return c;//return fixed4(gi.indirect.diffuse,1);//return 1;}ENDCG}//阴影的投射Pass{//1、设置 "LightMode" = "ShadowCaster"Tags{"LightMode" = "ShadowCaster"}CGPROGRAM#pragma vertex vert#pragma fragment frag//需要添加一个 Unity变体#pragma multi_compile_shadowcaster#include "UnityCG.cginc"//声明消融使用的变量float _Clip;sampler2D _DissolveTex;float4 _DissolveTex_ST;//2、appdata中声明float4 vertex:POSITION;和half3 normal:NORMAL;这是生成阴影所需要的语义.//注意:在appdata部分,我们几乎不要去修改名字 和 对应的类型。//因为,在Unity中封装好的很多方法都是使用这些标准的名字struct appdata{float4 vertex:POSITION;half3 normal:NORMAL;float4 uv:TEXCOORD;};//3、v2f中添加V2F_SHADOW_CASTER;用于声明需要传送到片断的数据.struct v2f{float4 uv : TEXCOORD;V2F_SHADOW_CASTER;};//4、在顶点着色器中添加TRANSFER_SHADOW_CASTER_NORMALOFFSET(o),主要是计算阴影的偏移以解决不正确的Shadow Acne和Peter Panning现象.v2f vert(appdata v){v2f o;o.uv.zw = TRANSFORM_TEX(v.uv, _DissolveTex);TRANSFER_SHADOW_CASTER_NORMALOFFSET(o);return o;}//5、在片断着色器中添加SHADOW_CASTER_FRAGMENT(i)fixed4 frag(v2f i) : SV_Target{//外部获取的 纹理 ,使用前都需要采样fixed4 dissolveTex = tex2D(_DissolveTex, i.uv.zw);//片段的取舍clip(dissolveTex.r - _Clip);SHADOW_CASTER_FRAGMENT(i);}ENDCG}//在常规的渲染时,是不会被使用的。一般使用时,是在烘焙贴图// Extracts information for lightmapping, GI (emission, albedo, ...)// This pass it not used during regular rendering.Pass{Name "META"Tags{"LightMode" = "Meta"}CGPROGRAM#pragma vertex vert#pragma fragment frag#pragma target 2.0#include "UnityCG.cginc"#include "UnityMetaPass.cginc"fixed4 _Color;struct v2f{float4 pos : SV_POSITION;};v2f vert(appdata_full v){v2f o;UNITY_INITIALIZE_OUTPUT(v2f,o)o.pos = UnityMetaVertexPosition(v.vertex, v.texcoord1.xy, v.texcoord2.xy, unity_LightmapST,unity_DynamicLightmapST);return o;}half4 frag(v2f i) : SV_Target{UnityMetaInput metaIN;UNITY_INITIALIZE_OUTPUT(UnityMetaInput, metaIN);metaIN.Albedo = 1;metaIN.Emission = _Color;return UnityMetaFragment(metaIN);}ENDCG}}CustomEditor "LegacyIlluminShaderGUI"
}
相关文章:
Unity中全局光照GI的总结
文章目录 前言一、在编写Shader时,有一些隐蔽的Bug不会直接报错,我们需要编译一下让它显示出来,方便修改我们选择我们的Shader,点击编译并且展示编译后的Shader后的内容,隐蔽的Bug就会暴露出来了。 二、我们大概回顾一…...

毫米波雷达技术在自动驾驶中的关键作用:安全、精准、无可替代
自动驾驶技术正以前所未有的速度不断演进,而其中的关键之一就是毫米波雷达技术。作为自动驾驶系统中的核心感知器件之一,毫米波雷达在保障车辆安全、实现精准定位和应对复杂环境中发挥着不可替代的作用。本文将深入探讨毫米波雷达技术在自动驾驶中的关键…...

Jetson平台180度鱼眼相机畸变校正调试记录
1.需求说明 由于使用180度GMSL鱼眼相机,畸变很大; 如需算法使用,必须进行畸变校正 2. 硬件说明 相机: 森云 SG2-AR0233-5300-GMSL2-190H 主板: Jetson NX 3. opencv畸变矫正处理 3.1 获取内参系数 现在森云相机可以直接读取内部flash获取内参系数 3.2 畸变处理 …...
axios请求的问题
本来不想记录,但是实在没有办法,因为总是会出现post请求,后台接收不到数据的情况,还是记录一下如何的解决的比较好。 但是我使用export const addPsiPurOrder data > request.post(/psi/psiPurOrder/add, data); 下面是封装的代码。后台接…...

【pandas刷题系列】Leetcode Problem: [595. 大的国家]
Problem: 595. 大的国家 文章目录 思路解题方法复杂度Code 思路 筛选出对应的数据,然后将不需要的列去除 解题方法 筛选出对应的数据,然后将不需要的列去除 复杂度 时间复杂度: O ( n ) O(n) O(n) 空间复杂度: O ( n ) O(n) O(n) Code import pandas a…...

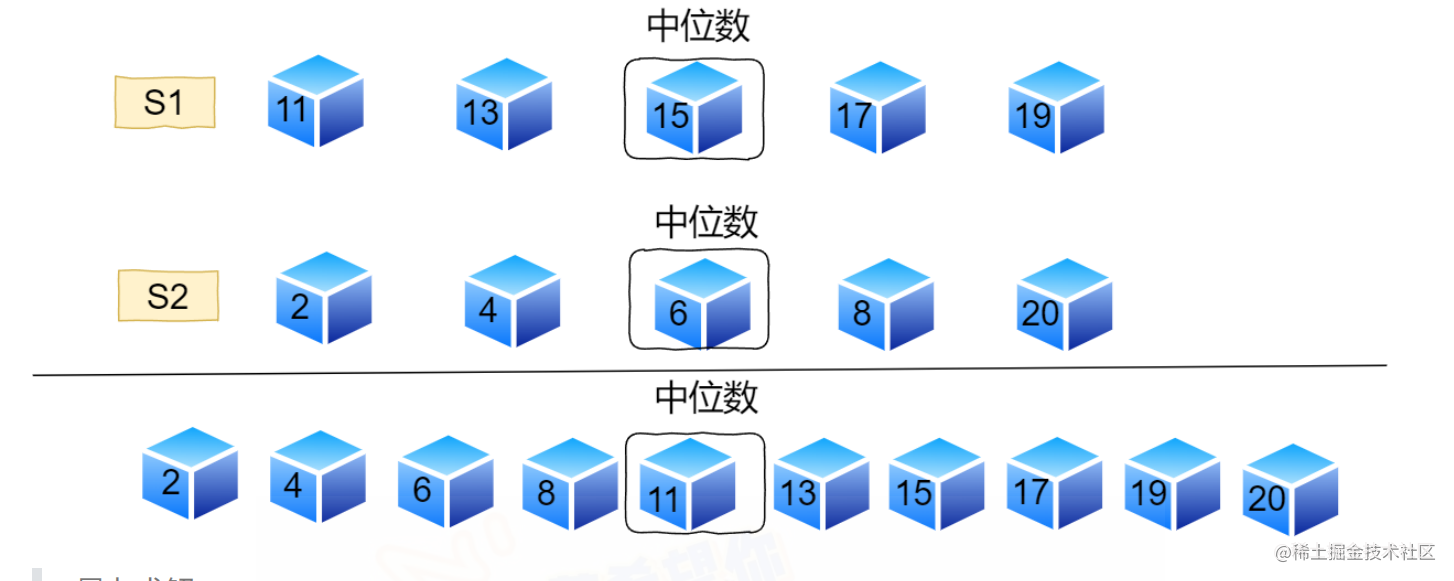
【打卡】牛客网:BM46 最小的K个数
资料: 1. 排序 sort(name.begin(),name.end()); //升序 sort(name.rbegin(),name.rend()); //降序 【C】vector数组排序_vector排序_比奇堡咻飞兜的博客-CSDN博客 2. 把v2的部分值赋给v1 v1.assign(v2.begin(), v2.end()); // 用新元素替换vector 中的元素。…...

Android各类View触摸监听器失效
在XML布局中出现重叠的View,位置靠后定义的View会覆盖住位置靠前的View;即靠后的View会拦截触碰事件导致靠前的View无法收到触碰事件,无法触发监听器。 //例.<?xml version"1.0" encoding"utf-8"?> <android…...

未整理的知识链接
【scala】下划线用法总结 【scala】下划线用法总结_scala 下划线-CSDN博客 Spark Sql Row 的解析 Spark Sql Row 的解析 - 简书 spark dataframe foreach spark dataframe foreach_mob64ca12f0cf8f的技术博客_51CTO博客 spark- Dataframe基本操作-查询 https://blog.csdn.n…...
【2011年数据结构真题】
41题 41题解答: (1)图 G 的邻接矩阵 A 如下所示: 由题意得,A为上三角矩阵,在上三角矩阵A[6][6]中,第1行至第5行主对角线上方的元素个数分别为5, 4, 3, 2, 1 用 “ 平移” 的思想,…...
【科研绘图】MacOS上的LaTeX公式插入工具——LaTeXiT
在Mac上经常用OmniGraffle绘图,但是有个致命缺点是没办法插入LaTeX公式,很头疼。之前有尝试用Pages文稿插入公式,但是调字体和颜色很麻烦。并且,PPT中的公式插入感觉也不太好看。 偶然机会了解到了LaTeXiT这个工具,可…...

仓库自动化中的RFID技术的应用浅谈
仓库自动化与RFID技术的结合代表着现代供应链管理的一个重要革新。这两者的协同作用能够显著提升仓储效率、降低成本、增强库存管理、提高货物跟踪的准确性,并且使仓库操作更加智能化。 仓库自动化是一种通过应用自动化技术和系统来管理和优化仓库操作的方法。这种…...
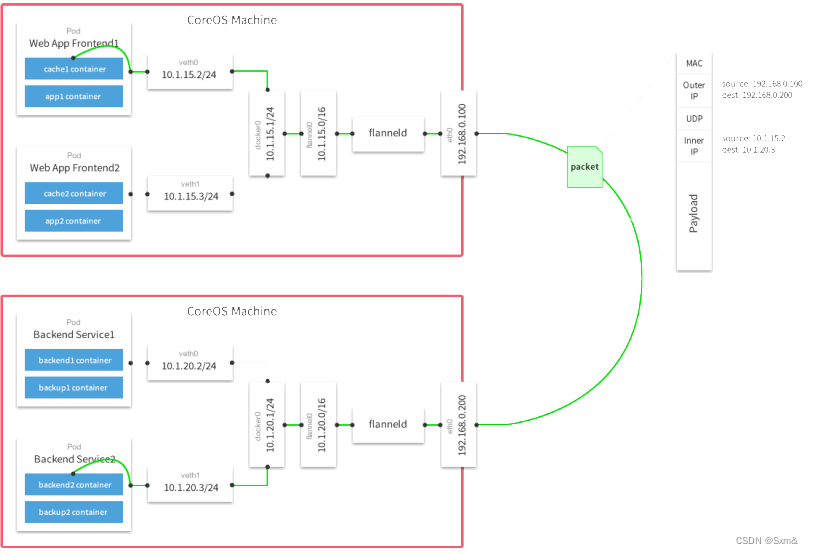
容器网络-Underlay和Overlay
一、主机网络 前面讲了容器内部网络,但是容器最终是要部署在主机上,跨主机间的网络访问又是怎么样的,跨主机网络主要有两种方案。 二、 Underlay 使用现有底层网络,为每一个容器配置可路由的网络IP。也就是说容器网络和主机网络…...
基于FPGA的PCIe-Aurora 8/10音频数据协议转换系统设计阅读笔记
文章可知网下载阅读,该论文设计了一种 PC 到光纤模块(基于Aurora的光纤传输)的数据通路,成功完成了Aurora 以及 DDR 等模块的功能验证。 学习内容: 本次主要学习了Pcie高速串行总线协议、Aurora高速串行总线协议、DDR相…...

stm32控制舵机sg90
一、sg90简介 首先介绍说一下什么是舵机。舵机是一种位置(角度)伺服的驱动器。适用于一些需要角度不断变化的,可以保持的控制系统。sg90就是舵机的一种。 舵机的工作原理比较简单。舵机内部有一个基准电压,单片机产生的PWM信号通…...
state 和 props 有什么区别?
一、state 一个组件的显示形态可以由数据状态和外部参数所决定,而数据状态就是 state,一般在 constructor 中初始化 当需要修改里面的值的状态需要通过调用 setState 来改变,从而达到更新组件内部数据的作用,并且重新调用组件 r…...

Unity 获取桌面路径的方法
在Unity中,当我们碰到以下一些情况时,可能需要桌面的路径。 1、文件操作:如果我们想在游戏中保存或读取文件到桌面,就可以使用桌面路径来指定文件的位置。 2、调试信息:在开发过程中,我们往往会将一些调试…...

基于SSM的考研图书电子商务平台的设计与实现
末尾获取源码 开发语言:Java Java开发工具:JDK1.8 后端框架:SSM 前端:Vue 数据库:MySQL5.7和Navicat管理工具结合 服务器:Tomcat8.5 开发软件:IDEA / Eclipse 是否Maven项目:是 目录…...

信息系统“好用”的标准探讨
数字化转型建设的关键不在建设信息系统。这是为了避免走信息化建设的老路——业务和信息化两张皮,寄希望信息系统解决业务问题。在数字化转型建设中,信息系统仍然是重要抓手和显性成果,是企业业务和数据的承载平台,也是IT厂商向客…...

vue elementui 实现从excel从复制多行多列后粘贴到前端界面el-table
1、效果图 可以全部复制粘贴,也可以单独对某行、某列进行复制粘贴 从excel复制粘贴到前端页面的table上 2、实现代码 html部分: <template><div><el-table:data"tableData"borderstyle"width: 100%":cell-class-…...

C++学习 --类和对象之友元
目录 1, 全局函数做友元 2, 类做友元 3, 成员函数做友元 友元可以让函数、成员函数、类, 访问另外一个类的私有变量 1, 全局函数做友元 在类中, 通过friend 数据类型 函数名()方式,将函数当…...

从U9C到钉钉:基于OPENAPI的审批流集成实战与避坑指南
1. 为什么需要U9C与钉钉审批流集成 在企业日常运营中,U9C作为ERP系统承担着核心业务管理功能,而钉钉则是移动办公和流程审批的利器。但两套系统各自为政时,会产生不少痛点。最常见的就是业务人员在U9C中生成采购单后,还要手动到钉…...

C学习历程的总汇
C学习历程的总汇 前言:在学习C时信息闭塞 没有接触到还有"博客"这么一个广阔的复习、学习平台 也就没有提交相关博文 但是电子笔记还是有很多的包括 每天的学习笔记 基础数据结构像顺序表 单向链表 双向链表 栈 队列 堆 均进行了模拟实现 小型游戏扫雷 小…...

从零开始:B站视频下载器BilibiliDown的5个核心使用技巧
从零开始:B站视频下载器BilibiliDown的5个核心使用技巧 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors/…...

QQ空间历史说说备份终极指南:一键永久保存你的青春记忆
QQ空间历史说说备份终极指南:一键永久保存你的青春记忆 【免费下载链接】GetQzonehistory 获取QQ空间发布的历史说说 项目地址: https://gitcode.com/GitHub_Trending/ge/GetQzonehistory 你是否曾试图找回多年前的QQ空间说说,却发现那些承载青春…...

CloudDrive实战:轻松将115网盘挂载为本地磁盘,享受无缝存储体验
1. 为什么需要将网盘挂载为本地磁盘? 每次打开网盘客户端才能上传下载文件,是不是觉得特别麻烦?想象一下,如果你的网盘能像电脑里的D盘、E盘一样直接出现在"此电脑"里,所有操作都跟本地文件一模一样…...

C语言实战:基于LU分解的高效矩阵求逆与行列式计算
1. 为什么需要LU分解? 第一次接触矩阵运算时,我总在想:为什么要把简单的矩阵乘法搞得这么复杂?直到在图像处理项目中遇到一个50005000的矩阵求逆问题,直接调用库函数跑了半小时还没结果,才意识到算法效率的…...

如何快速完成重庆大学毕业论文格式排版?终极LaTeX模板使用指南
如何快速完成重庆大学毕业论文格式排版?终极LaTeX模板使用指南 【免费下载链接】CQUThesis :pencil: 重庆大学毕业论文LaTeX模板---LaTeX Thesis Template for Chongqing University 项目地址: https://gitcode.com/gh_mirrors/cq/CQUThesis 还在为毕业论文格…...

ROFL播放器:英雄联盟回放文件的终极管理工具
ROFL播放器:英雄联盟回放文件的终极管理工具 【免费下载链接】ROFL-Player (No longer supported) One stop shop utility for viewing League of Legends replays! 项目地址: https://gitcode.com/gh_mirrors/ro/ROFL-Player 还在为英雄联盟回放文件无法播放…...
)
别再只测功能了!手把手教你为数据防泄露系统设计一份实战测试用例(附WinPE、虚拟机等16个场景)
数据防泄露实战测试:从高危场景到防御验证的完整指南 当企业核心代码库在深夜被批量下载到某个境外IP时,安全团队往往要等到审计警报响起才发现问题。更令人不安的是,我们最近对50家科技公司的调研显示,83%的内部数据泄露都发生在…...

ESP32实战指南:ADC连续采样与摇杆数据采集
1. ESP32 ADC连续采样基础解析 第一次接触ESP32的ADC功能时,我完全被各种专业术语搞晕了。后来在实际项目中反复调试才发现,理解ADC的关键在于抓住几个核心概念。ESP32-S3内置了两个12位SAR ADC(逐次逼近型模数转换器),…...